國
立
交
通
大
學
網路工程研究所
碩
士
論
文
在混合負載即時系統下之
高能源效率動態電壓調整演算法
Energy Efficient Dynamic Voltage Scaling for
Mixed Workload Real-time Systems
研 究 生:陳蒸民
指導教授:王國禎 教授
在混合負載即時系統下之高能源效率動態電壓調整演算法
Energy Efficient Dynamic Voltage Scaling for
Mixed Workload Real-time Systems
研 究 生:陳蒸民 Student:Jheng-Ming Chen
指導教授:王國禎 Advisor:Kuochen Wang
國 立 交 通 大 學
網 路 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Network Engineering College of Computer Science
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
June 2007
Hsinchu, Taiwan, Republic of China
在混合負載即時系統下之
高能源效率動態電壓調整演算法
學生:陳蒸民
指導教授:王國禎 博士
國立交通大學 資訊學院 網路工程研究所
摘 要
近年來,由於無線通訊的快速成長,使個人數位助理與手機等手持裝置的
能源消耗成為一個值得重視的研究問題。儘管有許多動態電壓調整演算法
被提出來降低即時系統上的能源消耗,但絕大部分的動態電壓調整演算法
僅針對只有週期性工作的即時系統,甚少動態電壓調整演算法適用於週期
性工作與非週期性工作同時存在的混合負載即時系統。一個混合負載即時
系統下的動態電壓調整演算法,不僅要節省能源消耗,同時也必須考慮到
非週期性工作的反應時間。本論文提出一個在速率單調(Rate Monotonic)
排程法下針對混合負載即時系統之基於工作需求估計寬裕時間(slack
time)的高能源效率動態電壓調整演算法(WSS)。WSS 估計寬裕時間是依據
非週期性工作排程伺服器的執行行為和原本只適用於純週期性工作即時
系統下的短期工作需求分析法。除此之外,當非週期性的工作量大於非週
期性工作排程伺服器所能服務的量時,WSS 會利用所估計的寬裕時間來提
前服務非週期性工作,因此可縮短非週期性工作的反應時間。模擬結果顯
示,我們所提出的方法相較於現存的 SNRT (BSS) 方法,節省了 23% (13%)
的能源消耗,縮短了 38% (31%) 的非週期性工作的反應時間,同時也減
少 52% (40%) 的能源消耗與反應時間乘積。
關鍵詞:實際工作量、任務間動態電壓調整方法、混合負載即時系統、寬
裕時間、最差執行時間。
Energy Efficient Dynamic Voltage Scaling for
Mixed Workload Real-time Systems
Student: Jheng-Ming Chen Advisor: Dr. Kuochen Wang
Department of Computer Science National Chiao Tung University
Abstract
Recently the wireless communication is rapidly growing up and the energy consumption on mobile devices, such as personal digital assistants (PDAs) and cellular phones, becomes a critical issue. In spite of numerous inter-task dynamic voltage scaling (DVS) algorithms have been brought up for energy saving of real-time systems with only periodic tasks or only aperiodic tasks, few of them were aimed at the mixed workload of periodic tasks and aperiodic tasks. A DVS algorithm for mixed workload real-time systems should not only focus on energy saving, but also consider low response time of aperiodic tasks. In this thesis, we develop an on-line energy efficient scheduling, Work-demand-based
Slack-Stealing scheme (WSS), to reduce CPU energy consumption for mixed workload
real-time systems under the Rate Monotonic (RM) scheduling policy. The WSS calculates the available slack time by the execution behaviors of scheduling servers for aperiodic tasks and by short-term work-demand analysis, which was originally designed for real-time systems with periodic tasks only. Moreover, the WSS also utilizes the concept of slack stealing to service aperiodic tasks and to reduce the response time when the actual workload of aperiodic tasks is close to the server utilization. Simulation results shows that the proposed WSS can effectively reduce the energy consumption, response time, and energy consumption * response time, in average, by 23%, 38%, 52% compared to the SNRT and 13%, 31% , 40% compared to the BSS, respectively.
Keywords: Actual workload, inter-task dynamic voltage scaling, mixed workload real-time
Acknowledgements
Many people have helped me with this thesis. I deeply appreciate my thesis advisor, Dr. Kuochen Wang, for his intensive advice and instruction. I would like to thank all the classmates in Mobile Computing and Broadband Networking Laboratory for their invaluable assistance and suggestions. This work was supported by the NCTU EECS-MediaTek Research Center under Grant Q583.
Contents
Abstract (in Chinese)……… i
Abstract (in English).………...iii
Acknowledgements………v
Contents... vi
List of Figures ...viii
List of Tables ... ix
Chapter 1 Introduction ... 1
Chapter 2 Preliminaries ... 4
2.1 Categories of Aperiodic Real-Time Tasks Scheduling ... 4
2.2 Categories of On-Line Inter-Task DVS Strategies ... 5
2.3 Low Power Work-Demand Analysis (lpWDA)... 7
Chapter 3 Related Work ... 13
3.1 Existing DVS Algorithms for Mixed Workload Real-Time Systems.. 13
3.2 Comparison of Existing Inter-Task DVS Algorithms for Mixed ... Workload Real-time Systems ... 15
Chapter 4 Proposed WSS Algorithm ... 17
4.1 System Model, Assumptions and Notations... 17
4.2 Basic Idea ... 17
4.3 Two Modes of the WSS... 18
4.4 The Stretching Rules in Power Saving Mode... 18
4.5 The Serviced Rules in Non-Power Saving Mode... 24
Chapter 5 Simulation Results and Discussion... 25
5.1 Simulation Model ... 25
5.2 Effects of Different Workloads of Aperiodic Tasks on Performance .. 26
5.3 Effects of Different WCET/BCET Ratios of Periodic Tasks on ... Performance... 29
5.4 Practical Issues ... 32
Chapter 6 Conclusions and Future Work... 33
6.1 Concluding Remarks ... 33
6.2 Future Work ... 33
List of Figures
Fig. 1. lpWDA algorithm [22]...10
Fig. 2. Short-term work-demand analysis example ...12
Fig. 3. The UpdataLoadInfo procedure in the WSS. ...21
Fig. 4. An example of work-demand-based slack-stealing scheme...23
Fig. 5. Effects of the workload of aperiodic tasks on (a) normalized energy consumption (b) normalized response time (c) normalized energy * response time ...29
Fig. 6. Effects of the WCET/BCET ratio of periodic tasks on (a) normalized energy consumption (b) normalized response time (c) normalized energy * response time. ...31
List of Tables
Table 1. Example task set ...12
Table 2. Qualitative comparison of existing on-line DVS algorithms for mixed
workload real-time systems. ...16
Chapter 1
Introduction
In order to conserve energy for battery-powered real-time systems, some techniques were proposed in the past. Such as shutting down systems parts while they are not in use is one of the techniques for portable devices. However, restarting the hardware takes time and increasing the response time. It's not effortless to determine when and which device should be shut down and woken up [1]. Another approach, called dynamic voltage scaling (DVS), to conserve power is by scaling down the processor voltage and frequency when some unused idle periods exist in the schedule at run time. The voltage scheduler determines which voltage to use by analyzing the state of the system. That is, the voltage scheduler of the real-time system supplies the lowest possible level voltage without affecting the system performance. Several commercially available processors provide the DVS feature, including Intel Xscale [2] and Xeon [3], Transmeta Crusoe [4], AMD Mobile Athlon [5], and IBM PowerPC 405LP [6].
It is known that the energy consumption E of a CMOS circuit is dominated by its dynamic supply voltage and is proportional to the square of its supply voltage, which is defined as E=Ceff ⋅Vdd ⋅C
2 [7], where
eff
C is the effective switched capacitance, V is the dd
supply voltage, and Cis the number of execution cycles. Degrading the supply voltage also
drops the maximum operating frequency proportionally (Vdd ∝ f ). Thus E could be
approximated as being proportional to the operating frequency squared ( 2
f
E∝ ). Therefore,
lowering operating frequency and according supply voltage is an effective technique for reducing energy consumption.
However, reduction of the operating frequency leads to long service time. For this reason, applying DVS algorithms for real-time tasks to reduce energy consumption should still meet all requirements of real-time systems. For hard real-time tasks, DVS algorithms which lower operating frequency have to ensure no task missing its deadline. In the same way, DVS algorithms have to ensure reasonable response time of soft real-time tasks while reducing the operating frequency.
Despite several obvious advantages by using DVS algorithms, it also causes more preemptions which increase energy consumption in memory subsystems, and extra energy consumption and time for voltage transitions. However, these overheads have been generally ignored because the overhead can be included into the worst case execution time (WCET) of a task [8][9]. Thus, a DVS algorithm can be used without modifications for real variable-voltage processors [8]. Additionally, [10] provides a technique that takes the task preemption into account while adjusting the supply voltage using the delayed preemption technique.
The DVS algorithms have been proposed in growing numbers to minimize energy consumption in the past decade. In [11], it classifies existing DVS algorithms for real-time systems into two categories. One is intra-task DVS algorithms, which uses the slack time when a task is predicted to complete before its WCET. The other is inter-task DVS algorithms, which allocates the slack time between the current task and the following tasks. The basic difference between them is that intra-task algorithms adjust the supply voltage during an individual task boundary, while inter-task algorithms adjust the supply voltage task by task.
In this thesis, we consider inter-task scheduling. Most of the existing inter-task algorithms were targeted at periodic tasks, and could get all tasks information in advance including arrival time, deadline, and WCET at the maximum processor speed. However,
practical real-time applications involve both periodic and aperiodic tasks. For instance, in multimedia applications such as MPEG players, some tasks such as decoding frames periodically have stringent periodic performance, and some aperiodic user requests (e.g., volume control) should be with reasonable response times [8]. Another example, a partition of jobs in a robot control application such as sensory acquisitions, data processing, path planning and low level control loops arrive periodically and must be serviced before each deadline to ensure robot stability. Other jobs such as operator requests or displaying activities occur randomly and usually have soft deadlines or no deadlines at all [12]. The flight systems and the automatic memory reclamation in real-time systems also have both periodic and aperiodic tasks [8]. Periodic tasks are time driven with absolute hard deadlines, in general, and aperiodic tasks are event driven with soft deadline. Moreover, a portion of aperiodic tasks could not know the actual workload in advance [13].
Therefore, we reduce the energy consumption while satisfying the requirements of periodic tasks. Although the aperiodic tasks are soft real-time and can be executed with the minimum speed to minimize the energy consumption, the response time of aperiodic tasks may become long. Contrarily, using the maximum speed wastes energy. It's not a suitable approach especially when we want battery-powered devices to live longer. So while reducing energy consumption on mixed workload real-time systems one has to consider the response time of aperiodic tasks.
The rest of this thesis is organized as follows. In chapter 2, we classify aperiodic real-time tasks scheduling, existing on-line inter-task DVS strategies, and describe the low power work-demand analysis. Chapter 3 reviews related work. Chapter 4 presents the target system model and describes the proposed WSS algorithm. In chapter 5, simulation results are evaluated and discussed. Some practical issues are also addressed. Finally, chapter 6 concludes with a summary and future work.
Chapter 2
Preliminaries
2.1 Categories of Aperiodic Real-Time Tasks Scheduling
Approaches to serve aperiodic and periodic tasks in real-time systems can be classified into four types:
(1). Background [14]
This is the simplest approach to service aperiodic tasks. In order to execute hard real-time tasks (i.e., periodic tasks) without deadline miss, the periodic tasks need to be serviced first. While there are no periodic tasks in the ready queue waiting for executing, aperiodic tasks can be serviced. The advantage of this approach is simple and with low overhead, but the response time of aperiodic tasks is large.
(2). Polling Server [14]
It creates a polling server as a periodic task, and aperiodic tasks are served during the activation of the polling server. It is characterized by Qs and Ts, where Qs is the maximum
budget and Ts is the period of the server. The polling server is up periodically at integer
multiplies of Ts, and it executes aperiodic tasks until the budget is exhausted or no aperiodic
task is in the queue. Then the polling server goes down and waits for the next wake-up time. Thus the budget is the WCET of the polling server, and the slack time is the interval that no aperiodic task is in the queue and the polling server goes down early. However, aperiodic tasks have to wait for next integer multiplies of Ts if they arrive when the polling server just
went down. As a result, the response time of aperiodic tasks becomes long.
(3). Bandwidth-Preserving Servers [12][14][15][16]
creating a server with execution budget which is a time amount for executing aperiodic tasks. It is also characterized by an ordered pair (Ts, Qs). Qs / Ts is the server utilization (Us). The
difference from the polling serve is that it serves aperiodic tasks anytime while the budget isn't zero. It will execute aperiodic tasks according to the execution budget. If the execution budget is exhausted, it will stop or delay serving the aperiodic tasks. For instance, the deferrable servers (DS) algorithm [14] is the simplest bandwidth-preserving servers. The execution budget qs of DS is consumed while aperiodic tasksexecute. An aperiodic task can
execute as long as the DS has the highest priority and the execution budget is larger than zero. If the execution budget is exhausted, aperiodic tasks are serviced at background priority until the next replenishment time (NRT). At each replenishment time, the execution budget is replenished to a maximum budget Qs. The replenishment of DS is at time kTs, for k = 0, 1,
2….
(4). Slack Sealing [17][18]
The slack stealing is executing aperiodic tasks by using the available slack times of periodic tasks. If there is available slack time from periodic tasks, aperiodic tasks could be serviced first without causing any deadline miss of period tasks. In this approach, the response time of aperiodic tasks is the lowest, but the complexity of such a real-time system is the highest among the above four approaches.
2.2 Categories of On-Line Inter-Task DVS Strategies
Existing on-line DVS algorithms for periodic tasks in real-time systems can be classified into four strategies [11][19]:
(1). Stretching-to-NTA [9]
This strategy is based on that the scheduler already knows the next task arrival time (NTA) of periodic tasks. The scheduler will stretch the execution time to the NTA, if it doesn't cause deadline miss in this way. Therefore, the operating frequency and supply voltage can be
decreased.
(2). Priority-Based Slack Stealing [20]
Because not all the execution time of tasks are in the worst cases, the slack time remains on the schedule if high priority tasks complete earlier than their WCETs. Consequently, the allowed execution time of low priority tasks can be extended.
(3). Utilization Updating [21]
The worst case processor utilization can be computed by the WCETs of tasks off-line. However, the actual execution time can be obtained on-line when a task completes its operation. That is, the actual processor utilization can be computed during run time, and it is less than the worst case processor utilization. Hence, the operating frequency can be decreased according to the new actual processor utilization.
(4). Short-Term Work-Demand Analysis [22]
The slack time is estimated by using the short term work-demand analysis. It enlarges the available slack time of the scheduled task by delaying the schedule of lower-priority tasks in near future as late as possible.
Note that most DVS algorithms used these strategies for real-time systems with periodic tasks only, and directly using these algorithms for mixed workload real-time systems is not appropriate. If we directly use the stretching-to-NTA for mixed workload real-time systems, it is hard to know the next arrival time of an aperiodic task. As a result, there will be deadline miss of hard real-time periodic tasks when high priority aperiodic tasks abruptly arrive during the stretching period.
In the priority-based slack stealing strategy and the utilization updating strategy, although getting the slack time of a periodic task is easy, it's not easy to decide the slack time of an aperiodic task. Especially, we even don't know the arrival time and the WCET of each aperiodic task ahead. If utilizing the slack time from an aperiodic task is too aggressive or the actual workload of aperiodic tasks is higher than the predict processor utilization, the deadline
miss will occur just like that occurs in the stretching to NTA. In the short-term work-demand analysis strategy, it’s hard to calculate the amount of work of the aperiodic tasks required to be processed in a period. Therefore, for mixed workload real-time systems, we should adapt these strategies to satisfy the timing constraints of periodic tasks and the short response time requirement of aperiodic tasks. That is, we need to modify the on-line DVS algorithms for periodic tasks and integrated them with the previous mentioned aperiodic real-time tasks scheduling approaches.
2.3 Low Power Work-Demand Analysis (lpWDA)
The lpWDA [22], which was originally designed for real-time systems with periodic tasks only, is an efficient on-line slack estimation heuristic for the RM scheduling. The slack estimation procedure uses the short-term work-demand analysis. The goal of the lpWDA is to extend the available slack time of the scheduled task by delaying the schedule of lower-priority tasks in near future as late as possible.
The slack time, slacki(t) of a periodic task Ti at time t can be computed as Di – t –
loadi(t), where Di is the deadline of Ti and loadi(t) is the amount of work required to be
processed in [t, Di]. loadi(t) consists of three types of work: (1) w (t)
rem
i : the remaining
WCET of Ti at time t for Ti itself, (2) Hi(t): the work from the higher-priority tasks, and (3)
Li(t): the work from the lower-priority tasks. wirem(t) is the known value at each scheduling
point, but Hi(t) and Li(t) should be computed from a complex analysis. In the lpWDA, it
computes approximate estimates of Hi(t) and Li(t), H~i(t) and L(t)
~ i , where ) ( ) (t H t
H~i ≥ i and L~i(t)≥Li(t), for a safe estimation on available slack times. Therefore,
slacki(t) can be computed by estimating an approximate value of loadi(t), load(t)
~
i ,
) t ( oad l ~
i is overestimated. Fig. 1 are the lpWDA algorithm, where Pi and Wi are the
period and WCET of Ti, ε is the infinitesimal, udi is the upcoming deadline of Ti, wdone is
the amount of work to be done between Ti being scheduled for execution and being
preempted, past i
H of Ti is the work required by uncompleted higher-priority tasks before t,
and CalcSlackTime() is a procedure of the lpWDA used to calculate the slack time slacki(t)
of Ti [22].
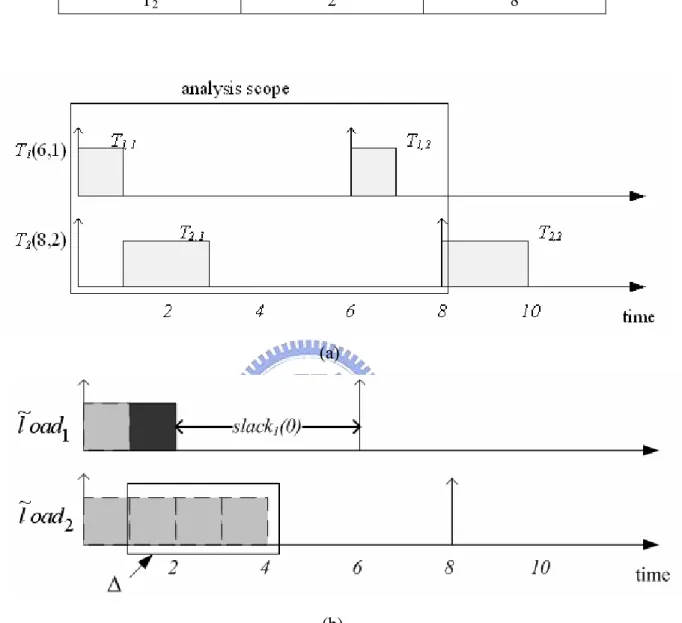
For instance, there are two periodic tasks in Table 1 and their periods are 6 and 8, respectively. The WCET of tasks are 1 and 2 time units, respectively. Fig. 2 (a) shows the non-DVS scheme, and Fig. 2 (b) shows the load estimation of each task at t = 0. While the first instance of T1, T1,1, is scheduled for execution, slack1(0) has to be calculated. The analysis scope of the lpWDA is [0, 8] according to the latest upcoming deadline, and
H~ (0)1 = 0 and H~ (0)2 = 2 can be derived. Now w1rem(0) and H~ (0)1 are known values,
but (0)L~1 has to be determined by T2 which has the earliest upcoming deadline among
tasks whose priorities are lower than that of T1. According to the lpWDA, (0)L1 ~
=
max(0,∆), where ∆=~load2(0)−w1rem(0)-H~1(0)-(ud2(0)-D1), and ud2(t) = 8 is the
upcoming deadline of task T2. Once load2(0) ~
is computed, we can estimate slack1(0) as follows, (0) 2 oad l ~ = 2rem(0) w +H~2(0)+L~2(0) = 2 + 2 + 0 = 4 (0) 1 L~ = max(0, 4 – 1 – 0 – (8 – 6)) = 1 slack1(0) = 6 – 0 – 1 – 0 – 1 = 4
A1(0) = max(0, slack1(0)) + w1rem(0) = 5 And the clock speed can be adjusted to
Sclk = ( 1 (0)
rem
lpWDA Algorithm :
IF system start then FOR each task Tx
udx = Px Hx (t) = past x H
∑
− = ⎟⎟× ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ + − ⎥ ⎦ ⎥ ⎢ ⎣ ⎢ − + 1 1 1 x i i i i x W P t P ud ε ε IF Tx is activated THEN rem x w (t) = W x END IFIF Tx is completed or preempted THEN
Call UpdataLoadInfo()
END IF
IF Tx is scheduled for execution THEN
Call CalcSlackTime() to get slack time slackx(t)
Set the clock frequency and voltage accordingly.
END IF END IF
Function CalcSlackTime()
Identify the task Ty that has the earliest upcoming deadline
among tasks whose priorities are not higher than that of Tx
Ly(t) = CalcLowerPriorityWork(Ty)
loady(t) = wremy (t) + Hy(t) + Ly(t)
slackx(t) = max (0, udy – t – loady(t) )
return (slackx(t))
Function CalcLowerPriorityWork()
IF Ty is identical to Tn THEN return 0 END IF
Identify the task Tz that has the earliest upcoming deadline
among tasks whose priorities are lower than that of Ty
Lz(t) = CalcLowerPriorityWork(Tz)
loadz(t) =
rem z
w (t) + Hz(t) + Lz(t)
Ly(t) = max (0, loadz(t) – wremy (t) – Hy(t) – udz + udy)
return (Ly(t)) Function UpdateLoadInfo() IF (COMPLETION) THEN udx = udx + Px Hx(t) =
∑
− = ⎟⎟× ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ + − ⎥ ⎦ ⎥ ⎢ ⎣ ⎢ − 1 1 1 x i i i i x W P t P ud ε εLOOP each task Ti, i = x + 1 until i = n
Hi(t) = Hi(t) – wremx (t) END LOOP rem x w (t) = 0 ELSE (PREEMPTION) rem x w = wxrem – wdone
LOOP each task Ti, i = x + 1 until i = n
Hi(t) = Hi(t) – wdone
END LOOP END IF
Table 1. Example task set
(a)
(b)
Fig. 2. Short-term work-demand analysis example: (a) shows the non-DVS scheme before using lpWDA. (b) shows the load estimation of each task at t = 0 using lpWDA. (The gray-boxes mean the amount of work from the higher or same priority tasks, and the black-boxes mean the amount of work from the lower priority tasks.)
Task WCET(ms) Period(ms)
T1 1 6
Chapter 3
Related Work
3.1 Existing DVS Algorithms for Mixed Workload
Real-Time Systems
Recently, several researchers proposed DVS algorithms for mixed workload real-time systems. Under the EDF (Earliest Deadline First) (or EDF*) scheduling policy, most of these algorithms integrate the bandwidth preserving servers and priority-based slack stealing strategy.
Doh et al. [23] proposed an approach which leads to proper allocation of energy budgets for hard periodic and soft aperiodic real-time tasks. Given an energy budget, it computes a proper voltage setting for attaining an improved performance for aperiodic tasks while meeting the deadline requirements of periodic tasks. It used Total Bandwidth Servers (TBS) [12], which is a kind of bandwidth preserving servers, and only focused on the off-line static scheduling problem.
Aydin et al. proposed three separate on-line schemes with mixed workload under a power consumption constraint. It also used TBS and Dynamic Reclaiming Algorithm (DRA) [20] under the EDF* scheduling policy. In the Basic Reclaiming Scheme (BRS) [24] the earliness of aperiodic tasks is only used for reclaiming the coming aperiodic tasks, and the earliness of periodic tasks is only used for reclaiming the coming periodic tasks. The Mutual Reclaiming Scheme (MRS) [24] was developed from BRS. The main difference between MRS and BRS is that in the MRS both periodic and aperiodic tasks can mutually reclaim their unused computation times. The Bandwidth Sharing Scheme (BSS) [24] is to solve the problem of the actual aperiodic workload that is relatively lower than the predict aperiodic workload. In the
BSS when the TBS is idle, the algorithm will create a ghost job J to produce more earliness to aggressively reduce the clock speed. But it will increase the response time of aperiodic tasks if an actual aperiodic task arrives right after creating the ghost job.
In [26], Shin et al. merged the TBS and two DVS algorithms, lppsEDF [9] and DRA, respectively, under the EDF* scheduling policy. They also proposed an enhanced approach called Workload-based Slack Estimation (WSE) [8], which integrates Constant Bandwidth Servers (CBS) [16] and DRA. The WSE is almost the same as the MRS (as indicated in [8]).
All of the above approaches focused on the EDF (or EDF*) scheduling policy. Few of existing DVS for mixed workload real-time systems were proposed under the RM scheduling policy. The RM scheduling policy has been adopted in most real-time schedulers of practical interest due to its low overhead and predictability [25].
Under the RM scheduling policy, most of these algorithms integrate the bandwidth preserving servers and stretching-to-NTA strategy. The Stretching-To-NRT (SNRT) [26] scheme is the first proposed DVS algorithm for mixed workload real-time systems under the RM scheduling policy by Shin et al. The SNRT is a modified stretching-to-NTA algorithm with the Deferrable Servers (DS) and Sporadic Servers (SS). Because the arrival time of an aperiodic task is unknown, the stretching rules are only applied when the budget of bandwidth preserving servers is exhausted. But it is inefficient when the workload of aperiodic tasks is small and the budget is larger than 0. They also proposed
Bandwidth-Based Slack-Stealing (BSS) [8] scheme which considers the bandwidth of a
scheduling server and identifies the maximum available time (MAT) for a periodic task. Even when the execution budget is larger than 0, the MAT can be calculated before the arrival time of next periodic task. Therefore, the clock speed of the periodic task can be slow down based on the MAT.
One problem of existing approaches is that they only calculate the MAT from the schedule point to NTA. To have long MAT, in this thesis, we propose an on-line DVS
algorithm named Work-demand-based Slack-Stealing (WSS) scheme for mixed workload real-time systems under the RM scheduling policy. The WSS integrates the bandwidth preserving servers and lpWDA [22] to compute the MAT by delaying the schedule of lower-priority periodic tasks. As a result, the MAT of high periodic tasks can be extended and the overall energy consumption can be reduced. Another problem of the existing approaches is that a periodic task with the highest priority may still run slowly even if there are some aperiodic tasks, without the execution budget, waiting in the ready queue. The WSS use the concept of slack stealing, which was originally used in mixed workload real time systems without DVS, to service aperiodic tasks when there are some aperiodic tasks, without the execution budget, waiting in the ready queue.
3.2 Comparison of Existing Inter-Task DVS Algorithms
for Mixed Workload Real-time Systems
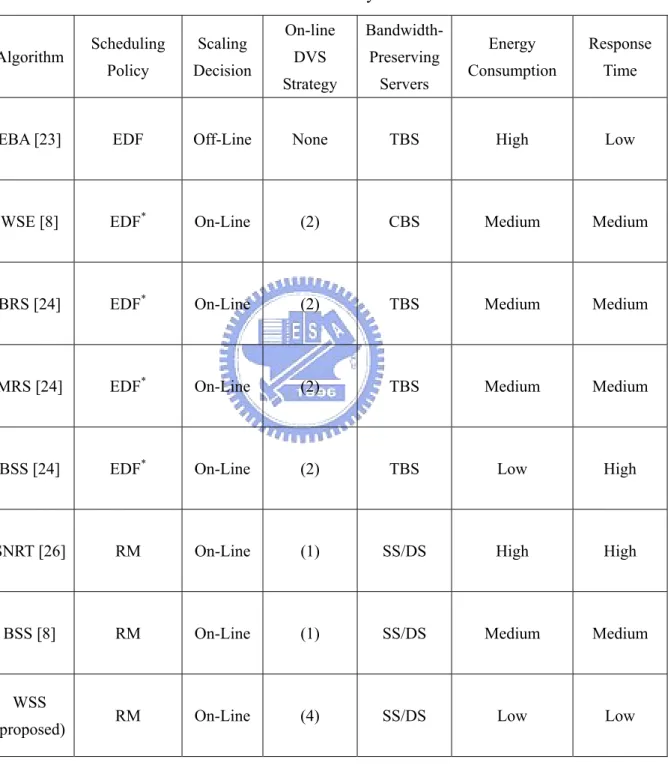
Table 2 shows the qualitative comparison of several existing inter-task DVS algorithms for mixed workload real-time systems along with the proposed WSS. The scheduling policy indicates an DVS algorithm uses RM or EDF scheduling policy, which are the two most popular real-time schedulers. EDF* is almost the same as EDF. The difference is that, in EDF*, amongthe tasks whose deadlines are the same, the task with the earliest arrival time has the highest priority. Among the tasks whose deadlines and arrival times are the same, the task with the lowest index has the highest priority. The scaling decision describes that the decision of the clock speed is calculated on-line or off-line. The on-line DVS strategy indicates that the DVS algorithms for mixed workload real-time systems belong to which on-line DVS strategies that were described in Chapter 2. The “bandwidth-preserving servers” indicates it combined which bandwidth-preserving servers to schedule aperiodic tasks. The metric of
energy consumption indicates the CPU energy consumption of each DVS algorithm. The
aperiodic task. We will compare the proposed WSS with the non-DVS scheme, SNRT, BSS quantitatively in chapter 5.
Table 2. Qualitative comparison of existing on-line DVS algorithms for mixed workload real-time systems.
Algorithm Scheduling Policy Scaling Decision On-line DVS Strategy Bandwidth-Preserving Servers Energy Consumption Response Time
EBA [23] EDF Off-Line None TBS High Low
WSE [8] EDF* On-Line (2) CBS Medium Medium
BRS [24] EDF* On-Line (2) TBS Medium Medium
MRS [24] EDF* On-Line (2) TBS Medium Medium
BSS [24] EDF* On-Line (2) TBS Low High
SNRT [26] RM On-Line (1) SS/DS High High
BSS [8] RM On-Line (1) SS/DS Medium Medium
WSS
Chapter 4
Proposed WSS Algorithm
4.1 System Model, Assumptions and Notations
The target processor can change its supply voltage (V) and clock speed (Sclk) (or
frequency) continuously within its operational ranges, [Vmin,Vmax] and [Smin,Smax]. There are
two components of mixed workload real-time systems: a set of T = { T1…Tn } of n periodic
tasks with hard deadlines, and a set of J aperiodic tasks arriving randomly with soft deadlines.
Ji is the ith aperiodic task. Ti has higher priority than Tj if i < j. A periodic task Ti can be specified as Ti(Pi, Wi), where Pi and Wi are the period and WCET of Ti. Based on related work [8][12][14][15][16][24][26], the arrival time, period and WCET of periodic tasks are known in advance, but those of aperiodic tasks are made available only when they arrive. The relative deadline (Di) of each periodic task instance is assumed equal to its period. All tasks are assumed to be independent.
4.2 Basic Idea
The basic idea of the proposed WSS (Work-demand-based Slack-Stealing) is to compute the slack time under the existence of the bandwidth preserving servers by using short-term work-demand analysis. Moreover, the WSS uses two modes of operation to reduce the response time of aperiodic tasks. It uses the concept of slack stealing to service aperiodic tasks. If there are some aperiodic tasks waiting in the ready queue, and there is no execution budget and the slack time is large than 0, the WSS will service the aperiodic tasks first and will not cause any deadline miss of periodic tasks.
4.3 Two Modes of the WSS
There are two modes of operation in the WSS: power saving mode and non-power saving
mode. When the execution budget is exhausted and there are still some aperiodic tasks in the
ready queue, the mode is set to the non-power saving mode. When no aperiodic task is in the ready queue or the execution budget is replenished, the mode is switched back to the power saving mode.
4.4 The Stretching Rules in Power Saving Mode
In the real-time systems with mixed workload, the slack time can still be computed by assuming that the bandwidth preserving server is an additional periodic task TBPS. The WCET
of TBPS is Qs and the period is Ts. The priority of TBPS is according to Ts. However, TBPS isn’t
like other periodic tasks. TBPS will not be executed even if its execution time is not zero when
there is no aperiodic task in the ready queue. The algorithm of the lpWDA with the DS/SS has to be modified as follows in order to be applicable to mixed workload real time systems:
z When a periodic tasks Ti finishes, Hi(t) has to be recalculated in the lpWDA. If the
bandwidth preserving server (BPS), which has the remaining execution budget qs,
has a higher-priority than Ti, the calculation of Hi(t) must include qs when Ti
finishes.
z When an aperiodic task is completed, it is just seen as a preemption of TBPS.
z At the deadline DBPS of TBPS, Hi(t) of each lower priority task Ti (for i > BPS) has to
be recomputed as Hi(t) = Hi(t) - qs. This implies that TBPS is completed at DBPS.
z When an aperiodic task is scheduled for execution, no computation of slack time is needed.
Therefore, in the power saving mode, we calculate the clock speed by following two stretching rules:
follows: 0 ) ( )) ( 0 ( ) ( S t w t slack , max t w rem i i rem i × +
where S0 is the initial clock speed.
z Stretching rule for an aperiodic task: If there is no periodic task in the ready queue, execute the aperiodic task at the clock speed of
0 ) ) ( (min NTA,R,D t,q S max q s BPS s × −
where the next periodic task arrival time (NTA), the next replenishment time (R) of the bandwidth preserving server, and the deadline (DBPS) of TBPS are known in
advance and t is the start time of the aperiodic task.
If there is any periodic task in the ready queue, the clock speed of aperiodic task is
S0.
In this way, Hi(t) of periodic task Ti is still an overestimated value for a safe estimation
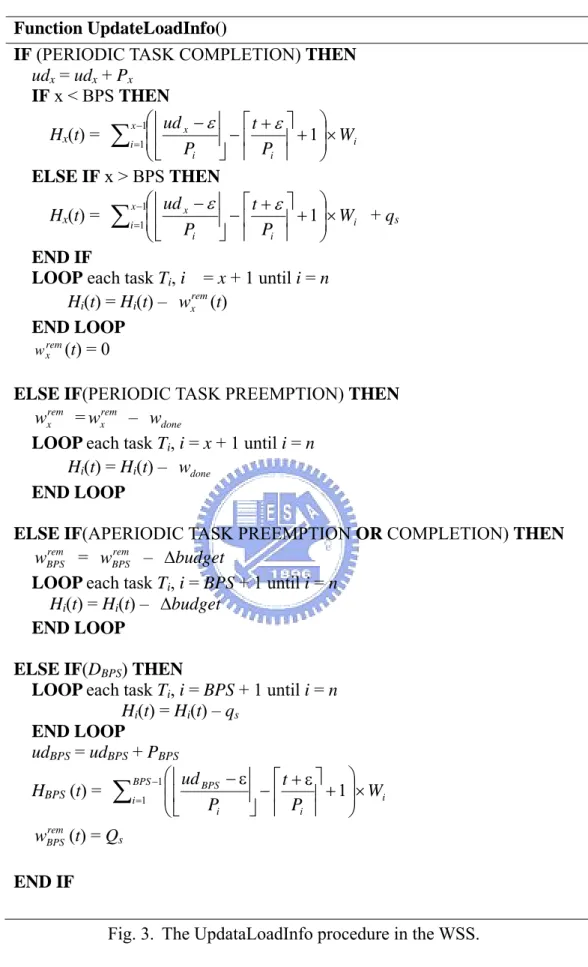
on available slack time, because the consumed execution budget of bandwidth preserving server will not exceed Qs in a period of Ts. Fig. 3 is the modified UpdateLoadInfo procedure
of Fig. 1 for the WSS, where budget∆ is the amount of consumed execution budget.
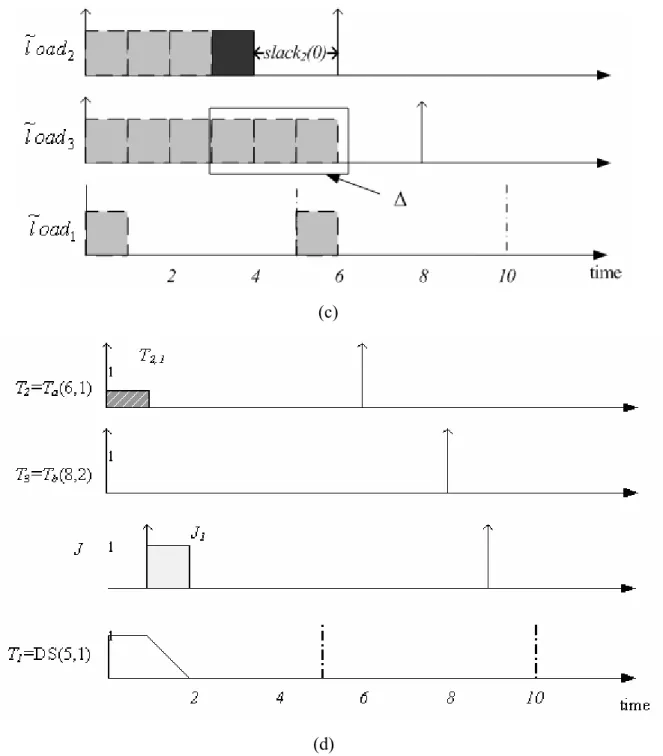
We give an example to illustrate the operation of WSS. Assume there are two periodic tasks Ta(6,1) and Tb(8,2). Fig. 4 (a) shows two aperiodic tasks are serviced by a DS(5,1)
without DVS. At t = 1, an aperiodic task J1 arrives. Because the execution budget is large than zero and the DS has the highest priority, J1 can be serviced immediately and the execution budget of DS is consumed at a rate of the clock speed per unit time. At t = 5, the execution budget is replenished. If any aperiodic task arrives between t = 2 and t = 5, the aperiodic task will be serviced by the background priority which was described in Chapter 2. Fig. 4 (b) and (c) show how to use the short-term work-demand analysis with a DS. When a periodic task is scheduled for execution, the calculation of slack time has to consider the execution budget of the DS. Because Ts of the DS is 5, TBPS has the highest priority. Therefore, we let TBPS = T1, Ta
= T2, and Tb = T3. At t = 0 , H0(0) = 0, H1(0) = 2, H2(0) = 4, and then slack2(0) = 2 can be derived by the CalcSlackTime() of Fig. 1. And the clock speed of T2 is 1 / (2 + 1) × S0 = 1/3 × S0. If T2,1 completes at t =1, H2(1) and H3(1) will be recalculated. Thus, H2(1) = 2 + 1 = 3 (1 from qs) and H3(1) = 3 according to Fig. 3. At this time, an aperiodic task J1 arrives, and it
will complete at t = 2 as shown in Fig. 4(d). Then H2(2) and H3(2) are 2 and 2 according to Fig. 3.
Function UpdateLoadInfo()
IF (PERIODIC TASK COMPLETION) THEN
udx = udx + Px IF x < BPS THEN Hx(t) =
∑
− = ⎟⎟× ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ + − ⎥ ⎦ ⎥ ⎢ ⎣ ⎢ − 1 1 1 x i i i i x W P t P ud ε ε ELSE IF x > BPS THEN Hx(t) =∑
− = ⎟⎟× ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ + − ⎥ ⎦ ⎥ ⎢ ⎣ ⎢ − 1 1 1 x i i i i x W P t P ud ε ε + qs END IFLOOP each task Ti, i = x + 1 until i = n
Hi(t) = Hi(t) – wxrem(t)
END LOOP
rem x
w (t) = 0
ELSE IF(PERIODIC TASK PREEMPTION) THEN
rem x
w =wremx – wdone
LOOP each task Ti, i = x + 1 until i = n
Hi(t) = Hi(t) – wdone
END LOOP
ELSE IF(APERIODIC TASK PREEMPTION OR COMPLETION) THEN
rem BPS
w = wBPSrem – budget∆
LOOP each task Ti, i = BPS + 1 until i = n
Hi(t) = Hi(t) – budget∆ END LOOP
ELSE IF(DBPS) THEN
LOOP each task Ti, i = BPS + 1 until i = n
Hi(t) = Hi(t) – qs END LOOP udBPS = udBPS + PBPS HBPS (t) =
∑
− = ⎟⎟× ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ +ε − ⎥ ⎦ ⎥ ⎢ ⎣ ⎢ −ε 1 1 1 BPS i i i i BPS W P t P ud rem BPS w (t) = Qs END IF(a)
(c)
(d)
Fig. 4. An example of work-demand-based slack-stealing scheme: (a) shows that tasks are scheduled with a DS without DVS. (b) shows the analysis scope with a DS. (c) shows the load estimation of each task at t = 0. (The gray-boxes mean the amount of work from higher or same priority tasks, and the black-boxes mean the amount of work from lower priority tasks.) (d) shows an aperiodic task completed at t = 2.
4.5 The Serviced Rules in Non-Power Saving Mode
If an aperiodic task arrives and no other aperiodic task is in the ready queue in the non-power saving mode, the WSS computes the slack time of a periodic task which has the highest priority in the ready queue and services the aperiodic task according to the slack time. For instance, if Jy arrives at time t without the execution budget and no other aperiodic task in
the ready queue, slacki(t) of the periodic task Ti, which has the highest priority in the ready
queue has to be calculated. If slacki(t) is greater than zero, it means the schedulability of Ti will not be affected even if the execution time of Ti is deferred by the amount of slacki(t).
Hence, we set [t, min(t + slacki(t), NRT)] as an time interval allowed to execute aperiodic tasks. If no aperiodic task is in the ready queue, slacki(t) can be reclaimed for Ti and the mode
can be switched back to the power saving mode. In other words, aperiodic tasks can be executed first if slacki(t) is larger than zero in the non-power saving mode, and in this way the
response time can be reduced when the actual workload of aperiodic tasks is large than the execution budget. On the other hand, if slacki(t) is smaller than or equal to zero, Ti will be
executed using clock speed S0. If Ti completes early, Jy has an opportunity to be serviced
according to the slack time of the new scheduled periodic task.
If Jy arrives at time t without execution budget but another aperiodic task is already in the
ready queue, then task Jy will be placed in a queue of pending tasks according to the FIFO
(first in, first out) scheduling policy. In addition, if another higher priority task Tj (j < i) arrives during a time interval allowed to execute aperiodic tasks, this time interval has to be recalculated.
Moreover, if an aperiodic task is serviced in the non-power saving mode, the Hi(t)’s of
the other lower priority tasks ( BPS < i ) need not be modified. The period of servicing aperiodic tasks looks like an idle period of the schedule in the non-power saving mode.
Chapter 5
Simulation Results and Discussion
5.1 Simulation Model
Aperiodic tasks were generated by the exponential distribution with interarrival time (1/λ) and service time (1/µ). We used a fixed value µ and varied λ to control the workload (ρ = λ/µ) of aperiodic tasks under a fixed utilization Up of periodic tasks [8]. There are three
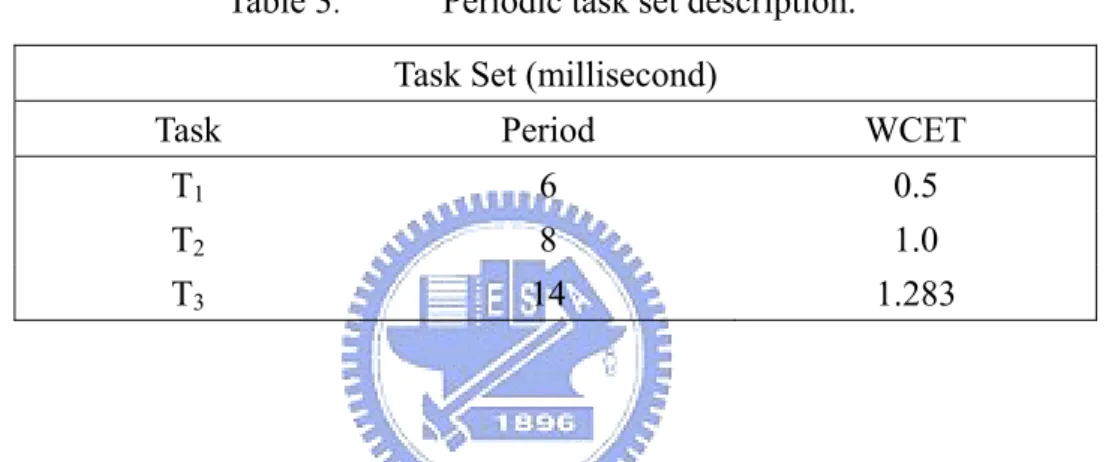
periodic tasks in Table 3. The period of each task is 6, 8, and 14, respectively and the WCET of each task is 0.5, 1.0, and 1.283, respectively. The utilization Up of periodic tasks
is 0.3 ((0.5 / 6) + (1.0 / 8) + (1.283 / 14)) [8].
The actual execution time of each periodic task instance was generated by a normal distribution function in the range of [BCET, WCET], where BCET is the best-case execution time. The mean and the standard deviation were set to (WCET+BCET)/2 and (WCET-BCET)/6, respectively [24]. In the experiments, the voltage scaling overhead is assumed negligible both in the time delay and power consumption [8]. The total amount of
Us and Up must be smaller than Ulub, which is the least upper bound of schedulable
utilization. Ulub is 1 with EDF scheduling and n(21/n-1) for n tasks with RM scheduling.
In order to experimentally evaluate the performance of the proposed algorithms, WSS, we implemented the following existing schemes for performance evaluation:
(1) PD scheme [8]: Aperiodic tasks were assumed to be serviced by the SS. It was also assumed that if the system is idle, it enters into the power-down mode (PD). The power consumption in the PD mode is assumed to be zero [8].
(2) Stretching-to-NRT (SNRT) scheme [25]: It was described in Chapter 3.
(3)Bandwidth-Based Slack-Stealing (BSS) scheme [8]: It was described in Chapter 3.
For all experiments, all tasks were assigned an initial clock speed S0 = (Up + Us) Sm / Ulub,
where Sm is the maximum clock speed [8]. In the following, we evaluated the performance
of each scheme in terms of energy consumption and response time. The energy consumption and response time are normalized to those of PD [8].
Table 3. Periodic task set description. Task Set (millisecond)
Task Period WCET
T1 6 0.5
T2 8 1.0
T3 14 1.283
5.2 Effects of Different Workloads of Aperiodic Tasks
on Performance
BCET is assumed to be 10% of WCET, and ρ is ranging from 0.05 to 0.25 (λ = 0.05 ~
0.25 and µ = 1.0) [8]. The server utilization Us is set from 10% ~ 35%, where Us is
controlled by changing the value of Ts with a fixed Qs value [8]. The WSS is compared with
the others three schemes under different workloads (server utilization) of aperiodic tasks.
Fig. 5 shows the effects of different workloads (server utilization) on (a) normalized energy
consumption, (b) normalized response time, and (c) normalized energy * response time of
following observations:
z As the server utilization (Us) increases, the energy consumption of all schemes
increases because the initial clock speed S0 increases.
z When the actual workload of aperiodic tasks is close to the server utilization, the energy consumption of the WSS is close to that of the BSS. The reason is that the slack time of the WSS will be used to service aperiodic tasks when the execution budget is exhausted.
z When the workload of aperiodic tasks is close to server utilization, the response time of all schemes increases.
z The WSS reduces the energy consumption, in average, by 58%, 22%, and 12% compared with the PD, SNRT, and BSS, respectively.
z The WSS reduces the response time, in average, by 38% and 31% compared with the SNRT and BSS, respectively. The PD has the smallest response time.
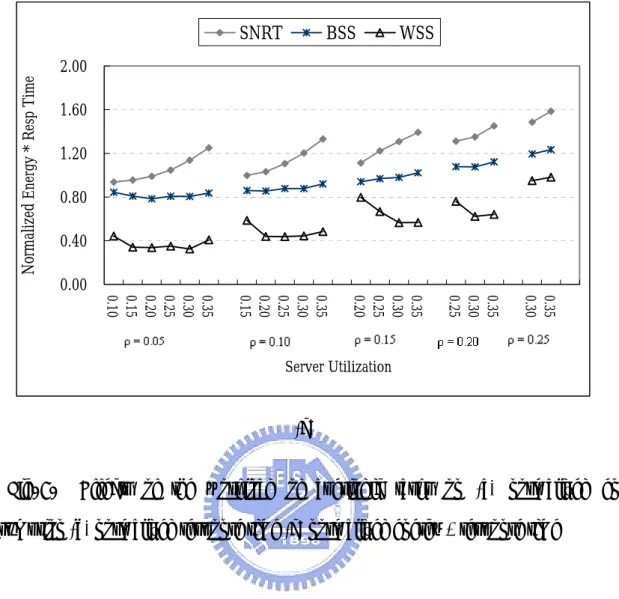
The normalized energy * response time [24] is a performance metric that combines the two important dimensions, energy consumption and response time, of the mixed workload real-time systems. As Fig. 5 (c) shown, the WSS has better performance than the other three schemes in terms of normalized energy * response time.
0.00 0.20 0.40 0.60 0.80 1.00 0. 10 0.15 0.20 0.25 0.30 0.35 0.15 0.20 0.25 0.30 0.35 0.20 0.25 0.30 0.35 0.25 0.30 0.35 0.30 0.35 Server Utilization Normalized Energy Consumption SNRT BSS WSS (a) 0.00 0.60 1.20 1.80 2.40 3.00 3.60 0. 10 0.15 0.20 0.25 0.30 0.35 0.15 0.20 0.25 0.30 0.35 0.20 0.25 0.30 0.35 0.25 0.30 0.35 0.30 0.35 Server U tilization N or m al iz ed R es pons e T im e SNRT BSS W SS (b)
0.00 0.40 0.80 1.20 1.60 2.00 0.10 0.15 0.20 0.25 0.30 0.35 0.15 0.20 0.25 0.30 0.35 0.20 0.25 0.30 0.35 0.25 0.30 0.35 0.30 0.35 Server Utilization No rm al ized E ne rgy * Re sp T im e SNRT BSS WSS (c)
Fig. 5. Effects of the workload of aperiodic tasks on (a) normalized energy consumption (b) normalized response time (c) normalized energy * response time
5.3 Effects of Different WCET/BCET Ratios of Periodic
Tasks on Performance
Assume that the workload of aperiodic tasks ρ is 0.1 [24], server utilization Us is 0.2, and
the WCET/BCET ratio varies from 1 to 10 [20]. Fig. 6 shows the effects of different workloads (server utilization) on the (a) normalized energy consumption, (b) normalized response time, and (c) normalized energy * response time of all schemes. From these simulation results, we have the following observations:
z The normalized energy consumption of the SNRT and BSS decreases very little with respect to the increase of the WCET/BCET ratio of periodic tasks.
WSS decreases. The reason is that the slack time increases as WCET/BCET increases, and the WSS is more efficient in utilizing the slack time than the other three schemes.
z The WSS reduces the energy consumption by an average of 66%, 23%, and 13% compared with the PD, SNRT, and BSS, respectively.
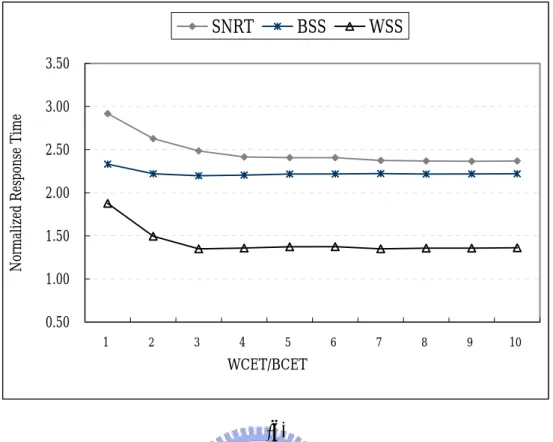
z The WSS reduces the response time by 38%, and 31% compare with the SNRT and BSS, respectively. The PD has the smallest response time.
z The WSS has better performance than the other three schemes in terms of normalized energy * response time.
0.00 0.20 0.40 0.60 0.80 1.00 1 2 3 4 5 6 7 8 9 10 WCET/BCET N or m aliz ed E ne rg y C on su m ptio n SNRT BSS WSS (a)
0.50 1.00 1.50 2.00 2.50 3.00 3.50 1 2 3 4 5 6 7 8 9 10 WCET/BCET Normal ized Response Ti me SNRT BSS WSS (b) 0.00 0.30 0.60 0.90 1.20 1.50 1 2 3 4 5 6 7 8 9 10 WCET/BCET Normalized Energy * Resp Ti me SNRT BSS WSS (c)
Fig. 6. Effects of the WCET/BCET ratio of periodic tasks on (a) normalized energy consumption (b) normalized response time (c) normalized energy * response time.
5.4 Practical Issues
In this thesis, we assumed that the CPU speed can be changed continuously for DVS. However, real CPUs only support a finite number of speed levels. The WSS can be adapted to real CPUs by choosing the lowest speed level that is equal to or greater than the speed value suggested by the WSS [20]. The more speed levels CPUs provide, the energy consumption is more close to that of ideal CPUs [20]. In the proposed WSS scheme, the time complexity to estimate slack time varies from O(1) (in the best case) to O(n) (in the worst case) with respect to the priorities of the scheduled tasks [22]. This is the overhead of the proposed algorithm.
Chapter 6
Conclusions and Future Work
6.1 Concluding Remarks
In this thesis, we have presented an on-line dynamic voltage scaling (DVS) algorithm, called WSS, for mixed workload real-time systems. The WSS not only addresses the energy consumption for mixed workload real-time systems, but also consider the response time of aperiodic tasks. The WSS integrates the low power work-demand analysis (lpWDA [22]) to set a suitable clock speed and uses slack time to service aperiodic tasks when the actual workload of aperiodic tasks is close to the server utilization. The WSS can use the slack time more efficient than existing approaches, because it enlarges the slack time by delaying the schedule of lower-priority periodic tasks in near future as late as possible.Simulation results have shown that the WSS can effectively reduce the energy consumption, response time, and energy consumption * response time, in average, by 23%, 38%, 52% compared to the SNRT and 13%, 31% , 40% compared to the BSS, respectively.
6.2 Future Work
In the future, we may take more factors, such as number of preemptions, extra time and energy consumption overhead for voltage transitions and the realistic CPU speed levels, into consideration to make the proposed algorithm more feasible to realistic systems. The influences of these factors on energy consumption and response time deserve to further study.
Bibliography
[1] L. Benini, A. Bogliolo, and G. De Micheli, “A survey of design techniques for system level dynamic power management,” IEEE Transactions on Very Large Scale
Integration Systems, Vol.8, No.3, pp. 299-316, 2000.
[2] Intel XScale® Technology, “Intel. PXA270 processor electrical, mechanical, and thermal specification,“ http://www.intel.com/design/intelxscale/
[3] Intel® Xeon® Processor, http://www.intel.com/products/processor/xeon/
[4] Trasmeta Corporation, “TN5400 processor specification,” http://www.transmeta.com/crusoe/
[5] Mobile AMD AthlonTM 64 processor, http://www.amd.com/us-en/Processors/ProductInformation/0,,30_118_10220_10221,0
0.html
[6] G. Carpenter, “Low power SOC for IBM's PowerPC information appliance platform,” in http://www.research.ibm.com/arl.
[7] B. Moyer, “Low-power design for embedded processors,” in Proceedings of IEEE, Volume 89, Issue 11, pp. 1576-1587, November 2001.
[8] D. Shin, and J. Kim, “Dynamic voltage scaling of mixed task sets systems in priority-driven systems,” IEEE Transactions on Computer-Aided Design of Integrated
Circuits and Systems, Volume 25, Issue 3, pp. 438-453, March 2006.
[9] Y. Shin, and K. Choi, “Power conscious fixed priority scheduling for hard real-time systems,” in Proceedings of the Design Automation Conference, pp. 134-139, 1999.
[10] W. Kim, J. Kim, and S. L. Min, “Preemption-aware dynamic voltage scaling in hard real-time systems,” in Proceedings International Symposium Low Power Electronics
and Design, pp. 393–398, 2004.
[11] W. Kim, D. Shin, H. S. Yun, S. L. Min, and J. Kim. ”Performance comparison of dynamic voltage scaling algorithms for hard real-time systems,” in Proceedings of the
IEEE Real-Time and Embedded Technology and Application Symposium, pp. 219-228,
September 2002.
[12] M. Spuri and G. Buttazzo, “Scheduling aperiodic tasks in dynamic priority systems,”
Journal of Real-Time Systems, vol. 10, no. 2, pp. 179-210, 1996.
[13] C. Rusu, X. Ruibin, R. Melhem, D. Mosse, "Energy-efficient policies for request-driven soft real-time systems," in Proceedings of Euromicro Conference on
Real-Time Systems, pp.175-183, July 2004.
[14] J. K. Strosnider, J. P. Lehoczky, and L. Sha, “The deferrable server algorithm for enhanced aperiodic responsiveness in hard real-time environments,” IEEE
Transactions on Computers, vol. 44, no. 1, pp. 73-91, Jan. 1995.
[15] B. Sprunt, L. Sha, and J. P. Lehoczky, “Aperiodic task scheduling for hard real-time systems,” Journal of Real-Time Systems, vol. 1, no. 1, pp. 27–60, 1989.
[16] L. Abeni and G. Buttazzo, “Integrating multimedia applications in hard real-time systems,” in Proceedings of the IEEE Real-Time Systems Symposium, pp. 4-13, 1998. [17] J. P. Lehoczky, and S. Ramos-Thuel, “An optimal algorithm for scheduling
soft-aperiodic tasks in fixed priority preemptive systems,” in Proceedings of the IEEE
Real-Time Systems Symposium, pp. 110-123, Dec. 1992.
[18] T.S. Tia, “Utilizing slack time for aperiodic and sporadic request scheduling in Real-Time Systems,” Technical Report No. UIUCDCS-R-95-1906, University of Illinois, April, 1995.
[19] C. Im, and S. Ha, “Dynamic voltage scaling for real-time multi-task scheduling using buffers,” in Proceedings of the 2004 ACM SIGPLAN/SIGBED conference on
Languages, compilers, and tools for embedded systems, pp. 88-94, 2004.
[20] H. Aydin, R. Melhem, D. Moose, and P. Mejia-Alvarez, “Power-aware scheduling for periodic real-Time tasks,” IEEE Transactions on Computers, Volume 53, Issue 5, pp. 584-600, May 2004.
[21] P. Pillai and K. G. Shin, “Real-time dynamic voltage scaling for low power embedded operating systems,” in Proceedings of the ACM Symposium on Operating Systems
Principles, pp. 89-102, 2001.
[22] W. Kim, J. Kim, and S. L. Min, “Dynamic voltage scaling algorithm for fixed-priority real-time systems using work-demand analysis,” in Proceedings of the International
Symposium on Low Power Electronics and Design, pp. 396-401, 2003.
[23] Y. Doh, D. Kim, Y.-H. Lee, and C. M. Krishna, “Constrained energy allocation for mixed hard and soft real-time tasks,” in Proceedings of 9th International Conference
on Real-Time and Embedded Computing Systems and Applications, pp. 533-550, 2003.
[24] H. Aydin, and Q. Yang, “Energy-responsiveness tradeoffs for real-time systems with mixed workload,” in Proceedings of 10th IEEE Real-Time and Embedded
Technology and Applications Symposium, pp 74-83, 2004.
[25] X.S. Hu, G. Quan, B. Mochocki, “A realistic variable voltage scheduling model for real-time applications,” in Proceedings of the International Conference on
Computer-Aided Design, pp. 726-731, 2002.
[26] D. Shin and J. Kim, “Dynamic voltage scaling of periodic and aperiodic tasks in priority-driven systems,” in Proceedings of Asia and South Pacific Design Automation
![Fig. 1. lpWDA algorithm [22]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8382137.178243/21.892.230.686.198.810/fig-lpwda-algorithm.webp)
![Fig. 1. lpWDA algorithm [22] (cont.)](https://thumb-ap.123doks.com/thumbv2/9libinfo/8382137.178243/22.892.224.706.160.1113/fig-lpwda-algorithm-cont.webp)