Abstract—In real applications, a remote control system is gener-ally an integration of different networks consisting of a commer-cial network for message transmission and an industrial network to control the remote hardware through a communication gateway. Since the induced time-delay in network control system (NCS) may cause system instability, this paper proposes a remote NCS struc-ture by implementing the adaptive Smith predictor with an on-line time-delay estimator. As the delay in a commercial network Ethernet is significantly time-varying depending on the number of end-users, the delay is estimated in this paper by processing the online measurement of the round-trip time (RTT) between the ap-plication layers of the server and the client. The adaptive Smith predictor control scheme is developed by directly applying the es-timated time-delay. To prove the feasibility of the proposed remote control system, the developed design has been applied to an AC 400 W servo motor tested from a 15 km distance. The experimental results indicate that the significantly improved stability and mo-tion accuracy can be reliably achieved by applying the proposed approach.
Index Terms—Adaptive Smith predictor, controller area net-work (CAN), Ethernet, netnet-worked control system (NCS), remote control, time-delay.
I. INTRODUCTION
D
UE to the rapid development of data communication net-work technologies in the Internet, real-time netnet-worked control applications have increasingly gained attention. These applications include teleoperation, remote mobile robots, and factory automation, which are organized by wiring connections among control system devices through network resources. The popularity is also because of the fact that network applications can be conveniently and systematically maintained in industry [1]. One of the newly developed technologies in modern indus-trial applications is the networked control system (NCS), which has potential applications simply by interconnecting all sensors, actuators, and controllers through networks [2]. The introduc-tion of network technologies provides easy maintenance and expandability for the control system design, but it also leads to problems of time-delay, data dropout, and package collision.Manuscript received December 31, 2008; revised October 24, 2009 and November 19, 2009. First published December 18, 2009; current version published February 05, 2010. This work was supported by the National Science Council, Taiwan, R.O.C., under Grant NSC 98-2218-E-009-005. Paper no. TII-08-12-0237.
The authors are with the Department of Electrical and Control Engineering, National Chiao-Tung University, Hsinchu, 300, Taiwan, R.O.C. (e-mail: [email protected]).
Digital Object Identifier 10.1109/TII.2009.2037917
Network scheduling has been studied to cope with these prob-lems. Another concern is that NCS performance may become unstable because the network delay is stochastic in nature, and it is difficult to directly apply linear delay-time system analysis. The total network-induced delay, both in the controller and ac-tuator, may present a bound or random format depending on the network protocols and seriously degrade the NCS performance. Recently, the use of NCS to deal with band-limited channels, time delays, and packet loss has been widely studied, mainly for the improvement of communication protocols and controller design [3]–[5]. With proper communication protocols, the enhancement of transmission technology provides guaranteed quality-of-service (QoS) for real-time applications [6]. A suffi-cient condition ensuring robust stability of NCS was presented in [7]. Tatikonda et al. formulated a linear discrete-time con-trol problem with a noiseless digital communication link and provided the role of information patterns and control policy knowledge [8]. Zai et al. used average dwell time for discrete switched systems to obtain conditions so that the stability of NCS is guaranteed [9]. Network-induced delay is one of the most important issues of NCS, and different methodologies have been proposed to deal with the delay effect within the process control loop. Considering both known and constant process delays with noise, a minimum variance control law [10] and a step-by-step tuning procedure [11] were developed separately to attain PI achievable performance for linear SISO time-delayed processes. Furthermore, extension of [10] was then developed to MIMO system [12]. A solution of minimum variance control law for the linear time-variant processes has been derived in the transfer function form [13]. Lian et al. identified several components of the time-delay of network protocols and control dynamics, and determined an accept-able working range of the sampling period in NCS [14]. The feedback gain of a memoryless controller and the maximum allowable delay can be derived by solving a set of linear matrix inequalities [15]. A design method of time-delayed control systems based on the concept of network disturbance and the communication disturbance observer (CDOB) without the knowledge of the delay-time model was proposed in [16].
Most of the above-mentioned research results are limited to constant or less time-varying delays of which are not true in real network environments. In this paper, time-based time-delay analysis of the NCS is provided to explain how it affects network systems. By applying the proposed adaptive Smith predictor based on the online time-delay estimation, satisfactory control performance of NCS can be obtained even as the time-delay in-creases significantly over integrated commercial and industrial
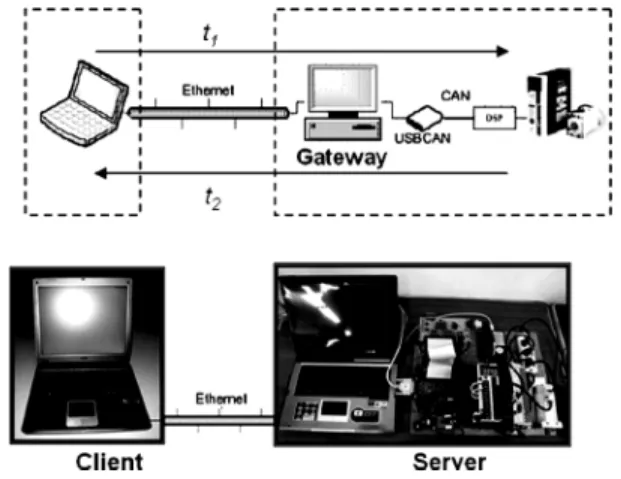
Fig. 1. The NCS block diagram.
networks. The proposed NCS has been applied to a remote con-trol system for an AC 400 W servo motor tested from a 15 km distance to verify the proposed design.
This paper is organized as follows: Section II introduces the NCS and the time-delay. Section III presents a real-time estimation algorithm for the delay time in a network, and an adaptive Smith predictor control scheme is proposed. Section IV discusses the main results, and conclusions are obtained in Section V.
II. NCSANDTIME-DELAYMEASUREMENT
The general NCS in the closed-loop model is shown in Fig. 1, where and are the time-delays induced in the network structure for the controller-to-actuator direction and the sensor-to-controller direction, respectively. Basically, the induced network delay varies according to the network load, scheduling policies, number of nodes, and different protocols. Network-delay systems are also different from general linear time-delay systems in that there is an assumption that the delay is constant or bounded. The NCS with time-varying character-istics makes modeling and design for NCS more difficult. The total time-delay can be categorized into three classes, based on the parts where they occur, namely, the server node, the network channel, and the client node. The time-delay at the server node is the preprocessing time, which is the sum of the computation time, the encoding time, the waiting time, the total queuing time, and the blocking time. The network time-delay includes the total transmission time of a message and its propagation delay, which depends on the message size, data rate, and the length of the network cable. The time-delay at the client node is the postprocessing time, as shown in Fig. 1.
Fig. 2 shows the structure of the present remote NCS, which includes the remote controller in the client and the server for the remote-controlled device. The client and the server com-municate with each other from a distance through the Ethernet network. The server consists of two parts in the present experi-mental setup. The first part is the gateway, which is implemented on a computer with the USBCAN designed to communicate between the Ethernet network and the CAN bus. The second part is the remote local servo motor controller implemented on TI F2812 DSP with a speed-control mode. The data commu-nication protocol adopts transmission control protocol (TCP) to construct the position loop for the remote control [17]. As shown in Fig. 2, the communication network can be modeled as the time-delay on the forward-command direction for actuators and on the feedback direction for sensors . Therefore,
Fig. 2. The experimental setup.
Fig. 3. The package transition diagram.
the network time-delay includes both the total transmission time of a message and the transformation time of the package from CAN data to Ethernet data. The processing time of the trans-formation is relatively small compared with the transmission time-delay. The total time-delay (round-trip time, RTT) can be expressed as , as shown in Fig. 2.
When data have to be transmitted to the remote client from the local hardware DSP, the type and the transition data in the data frame should be set up in advance, as shown in Fig. 3. By following the procedure , the message of the local DSP can be transmitted to a remote client. When data have to be transmitted to the client from the DSP, both the type and the transition data in the data frame should be set up on the CAN package. The CAN message is then included in the TCP package transmitted to the server through the Ethernet by following the procedure .
The network delay time for the present experiments includes the following cases: (1) NCTU Laboratory NCTU Labora-tory and (2) NCTU LaboraLabora-tory Hukuo (the two places are 15 km apart). The computer used for this network transmission had the following specifications: Intel®Pentium CPU 1.60 GHz,
496 MB of RAM, Realtek RTL8139/810x Family Fast Ethernet NIC Network Card, and the Windows XP Professional Version 2002 OS with SP2. The local area network (LAN) was used, and the time-delay exists between the application layer of the client and the server. In addition, the RTT measurement is cru-cial in the provision of accurate delay measurements periodi-cally. Technically, the Windows Forms Timer component in the operating system is single threaded, and it is limited to an ac-curacy of 55 ms. A higher resolution performance counter of
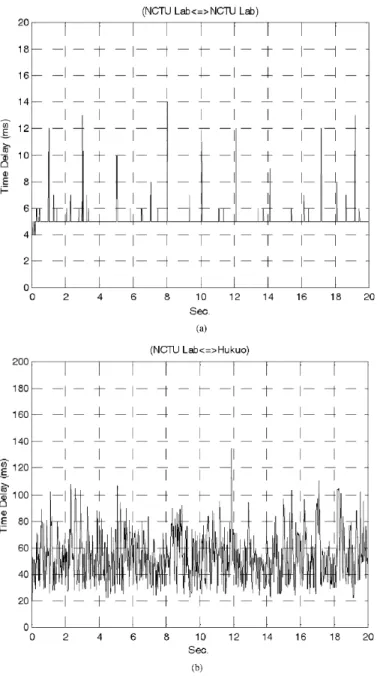
Fig. 4. Measured Internet delays: (a) NCTU Laboratory, NCTU Laboratory. (b) NCTU Laboratory, Hukuo.
the DSP timer with accuracy of 1 ms is used to measure net-work delay between the server and the client. We measured the time-delay from two different clients within the NCTU Labora-tory, and from two different clients located each in the NCTU Laboratory and Hukuo.
The delay time in the integrated Ethernet and the CAN bus transmitted with a 20 ms sampling period was measured, with results shown in Fig. 4. Because the transmission speed of the intranet is at 100 Mbps with a relatively short route within the NCTU Laboratory, only a very small delay time (around 3–15 ms) was recorded. From the NCTU Laboratory to Hukuo, the delay time increases since the transmission procedure takes more routes and switches. The experimental results indicate that the application environment greatly affects the induced delay time in NCS. Moreover, as distance increases, the delay time of a network increases as more nodes are involved.
Fig. 6. The system with the Smith predictor. (a) The original system. (b) The equivalent system.
III. ADAPTIVESMITHPREDICTOR
The communication network can be modeled as the time-delay on the forward direction for the actuator and on the feed-back direction for the sensor. As shown in Fig. 5, is the com-mand delay time, is the feedback delay time, and is the controller. denotes the transfer function of the real plant without the delay time. The transfer function from input
to output is obtained as follows: (where )
(1) The known delayed process can be effectively handled by ap-plying the Smith predictor if information of its delay is known and constant [18]. Since the delay time in the Internet can be measured between sending and receiving a packet, the equiv-alent block diagram in a closed-loop NCS can be well com-pensated by applying the Smith predictor, as shown in Fig. 6. The nominal delay time adopted for the Smith predictor is , and is the nominal model for the system. With an accu-rate model of the plant and the time-delay, and , the block diagram in Fig. 6(a) can be simplified into Fig. 6(b) with a pure time-delay term by applying the Smith predictor. In this paper, the delay time is estimated from the measured RTT with a real-time technique for implementing the Smith predictor [19]. To cope with significant variation in the delay time due to the network transmission, an adaptive design method is proposed for the present remote control systems with the integration of the Smith predictor, the PI controller, and the time-delay estimation. This is shown in Fig. 7.
Fig. 7. The block diagram of the adaptive Smith predictor with a PI controller.
Fig. 8. The CAN data frame in the proposed NCS for measuring RTT.
A. Online Estimation of the Delay Time
A method for estimating the delay time within the Internet for the NCS architecture with a combination of the time-driven and the event-driven processes is proposed in this paper. The designed control algorithm was realized on the present network by integrating both the Ethernet and the CAN bus with a high-integrity serial data communications bus between those devices. Technically, the standard CAN bus transmits only 8 bytes per frame; however, the minimum data length to realize the proposed RTT measurement will take 9 bytes. A program-ming method wherein messages will be divided into two parts and each of them will be sent at each half sampling period through the CAN network is proposed here. This is shown in Fig. 8.
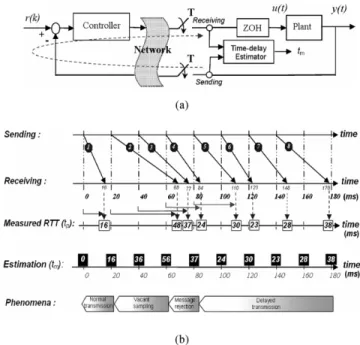
To illustrate the estimation of the induced network time-delay from the measurement of RTT, the NCS transmission is shown in Fig. 9. At the beginning of the sampling period, the clock-driven sensor node transmits the sampling data to the controller node. By assuming the sensor-to-controller delay as for this setup, the event-driven controller node uses the sensor data to compute the control signal and then transmits it to the actuator node. By assuming the controller-to-actuator delay as , the time-driven transmission is applied. The measurement of RTT was adopted due to its easy implementation and the fact that no clock synchronization is required since all computations are op-erating in the same device. The RTT measurement is crucial in periodically providing accurate delay measurements. A higher resolution performance counter of the DSP timer is used to mea-sure the network delay between the client and the server, as
Fig. 9. The illustrative example for the time-delay estimation. (a) The archi-tecture of the proposed RTT measurement. (b) The four transmitted models for the RTT and the time-delay estimation.
shown in Fig. 5. An example of message transmission based on a 20 ms sampling time is shown in Fig. 9(b). If a time-delay is less than one sampling time, its delay effect on the control perfor-mance is one sample delay and the first frame is in normal trans-mission. The second frame is sent 20 ms later, and a packet is received at 68 ms. Accordingly, the corresponding RTT is 48 ms and there is no data frame received at the 40 and 60 ms sam-pling times. This phenomenon is called vacant samsam-pling [20]. Two data messages (2 and 3) arrived in the same sampling pe-riod, and only the most recent data message is accepted while all previous data are discarded. This is referred to as message rejec-tion [20], [21]. For messages 4–8, all data arrived sequentially at each sampling point, although the exact receiving timing varied slightly. This occurrence is similar to delayed transmission. To summarize, the delay time of NCS can be modeled using four phenomena: normal transmission, vacant sampling, message re-jection, and delayed transmission. The time-delay adopted for the adaptive Smith predictor is estimated from the measured RTT with the following rules.
1) Normal transmission: When the time-delay is less than one sampling period, its delay effect is negligible and the mea-sured RTT is directly adopted as .
2) Vacant sampling: When the data message is not received before occurrence of the next sampling period, the previous measured RTT added with one sampling period is recog-nized as the current estimation of the delay time . 3) Message rejection: When more than two data messages
ar-rive at the same sampling period, only the most recently measured RTT is adopted as and all the previous mea-sured data are discarded.
4) Delayed transmission: The continuously measured RTT is the estimated time-delay and directly adopted for the adaptive Smith predictor to compensate for the time-delay effect.
Fig. 10. The control structure with the adaptive Smith predictor.
Fig. 11. Experimental results for system identification.
B. Adaptive Smith Predictor Design
Fig. 10 shows the block diagram of the network control system with a time-delay estimator. The total time of the command delay time and the feedback delay time is , as il-lustrated in Fig. 5. The Smith predictor is proposed as a control structure to compensate for the delay time [18], [19]. As shown in Fig. 10, is the controller, denotes the transfer function of the real plant and is the nominal model of the system without the delay time. The transfer function for the system as the adaptive Smith predictor involved is obtained using equation (2) shown at the bottom of the page. In Fig. 10, the part of with the dotted line is the Smith predictor. Its transfer function is simplified as follows:
When and , then the (2) simply be-comes
(3)
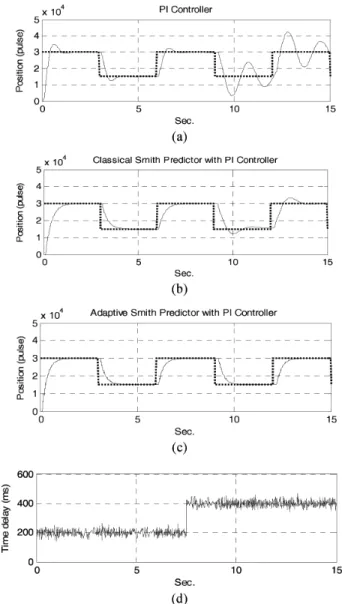
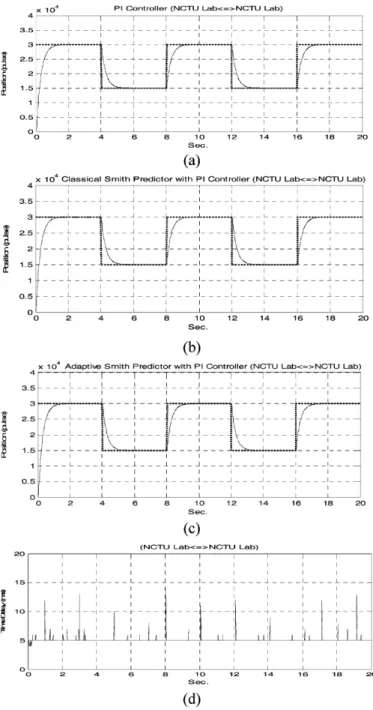
Fig. 12. Simulation results for: (a) the PI controller; (b) the classical Smith predictor (t = 200 ms) with PI controller; and (c) the adaptive Smith predictor with PI controller.
Equation (3) shows that the complicated transfer function of the delay time will become two simple parts. One part is the transfer function of the system without the delay time, and the other is the pure simple delay. The equivalent block diagram of (3) is also shown in Fig. 6(b). Here, the system presents the same closed-loop system but only with the pure command (forward) delay time as . In this case, the adaptive Smith predictor is proposed here the network delay is significant and the nominal value of the delay time is adopted directly from the estimated value as .
Fig. 13. Experimental results for: (a) PI controller; (b) classical Smith predictor (t = 5 ms) with PI controller; and (c) adaptive Smith predictor with PI con-troller (NCTU Laboratory, NCTU Laboratory).
IV. MAINRESULTS
The experimental setup was implemented to verify the time-delay effect induced by the network. To apply a remote control system on an AC 400 W servo motor, both the proposed adaptive Smith predictor control method and the online time- delay esti-mation algorithm were implemented efficiently on the DSP mi-crocontroller. The position control loop is located on the remote/ client site. Due to the high gain of the encoder with 10000 P/R, co-efficients of the PI controller are tuned as and
. The system identification result of the speed-control loop from the pseudorandom binary signal (PRBS) response for the present AC permanent magnet synchronous motor is shown in Fig. 11. The open-loop position control is obtained as follows:
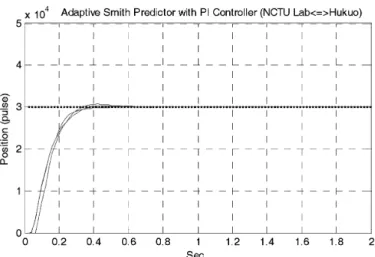
Fig. 14. Experimental results for: (a) PI controller; (b) classical Smith predictor (t = 46 ms) with PI controller; and (c) adaptive Smith predictor with PI controller (NCTU Laboratory, Hukuo).
Different controllers were tested according to following setups: 1) with the PI controller only; 2) the classical Smith predictor with the PI controller with a fixed delay time; and 3) the adaptive Smith predictor with the PI controller. For the client, the sampling time of the experiments was 20 ms with a square-wave command, where the upper/lower command of 30000/15000 pulses was provided. As the delay time increases,
Fig. 15. Experimental results for the adaptive Smith predictor (with the zero initial value).
Fig. 16. Experimental results for the adaptive Smith predictor (with an initial time-delay).
as shown in Fig. 12(d), simulation results indicate that control performance of the proposed adaptive Smith predictor presents much better performance compared with the PI controller with the classical Smith predictor as shown in Fig. 12(a) and (b). Experiments were also set up with different sites to test the pro-posed design. The delay time within the NCTU Laboratory was much smaller than the sampling time, so the time-delay effect was neglected, as shown in Fig. 13(d), and experimental results indicate that the control performance for different controllers is similar. As experiments tested between the NCTU Laboratory and Hukou with 15 km distance in addition with massive download data from multiple users at 16 seconds to share the limited network bandwidth, experimental results indicate that the time-delay accordingly increases to a certain level and the PI controller with a fixed-delay Smith predictor becomes unsuitable, as shown in Fig. 14(a) and (b). However, even with dramatically varied network-induced time-delay, the proposed adaptive Smith predictor still renders improved performance, as shown in Fig. 14(c). Furthermore, compared with three continuous responses of the proposed adaptive Smith predictor without considering the initial value as shown in Fig. 15, the proposed design with proper initial delay time renders much improved performance, as shown in Fig. 16.
and the CAN bus, the transmitted message is restricted by the CAN frame since its data length is limited to 8 bytes per frame only. For real-time applications, the present measurement of RTT requires 9 bytes for the data length. Therefore, in this paper, an algorithm is proposed by sending the measurement of each frame at the half sampling period to achieve online estimation of the delay time of the proposed NCS
2) The adaptive Smith predictor is adopted with the online estimated time-delay to achieve improved performance of NCS, and the significant time-varying delay effect mainly on the Ethernet is thus reduced. The experimental results on an AC servo motor over 15 km away also indicate that the proposed approach leads to significantly improved sta-bility and control performance.
3) The present remote controller applying the adaptive Smith predictor may present a larger overshoot because an initial estimation error may exist. By measuring the time-delay in advance as the nominal value, better performance can be obtained.
Although the remote control system with a general NCS can be stable for most of the time as the delay is bounded, the system stability is not guaranteed especially when a serious time-delay occurs. To prove the feasibility of our proposed approach, the adaptive Smith predictor has been successfully applied to NCS under significantly time-varying delay time to control an AC servo motor.
REFERENCES
[1] G. Kaplan, “Ethernet’s winning ways,” IEEE Spectrum, vol. 38, pp. 113–115, Jan. 2001.
[2] F. L. Lian, J. R. Moyne, and D. M. Tilbury, “Performance evaluation of control networks: Ethernet control net and device net,” IEEE Control
Syst. Mag., pp. 66–83, Feb. 2001.
[3] J. Baillieul and P. J. Antsaklis, “Control and communication challenges in networked real-time systems,” Proc. IEEE, vol. 95, pp. 9–28, Jan. 2007.
[4] J. P. Hespanha, P. Naghshtabrizi, and Y. Xu, “A survey of recent results in networked control systems,” Proc. IEEE, vol. 95, no. 1, pp. 138–161, Jan. 2007.
[5] S. Zampieri, “Trends in networked control systems,” in Proc. 17th
IFAC, Seoul, Korea, Jul. 6–11, 2008, pp. 2886–2893.
[6] M. Grenier and N. Navet, “Fine-tuning MAC-Level protocols for opti-mized real-time QoS,” IEEE Trans. Ind. Inform., vol. 4, no. 1, pp. 6–15, Feb. 2008.
[7] C. H. Chen, C. L. Lin, and T. S. Hwang, “Stability of networked control systems with time-varying delays,” IEEE Commun. Lett., vol. 11, no. 3, pp. 270–272, Mar. 2007.
[8] S. Tatikonda and S. Mitter, “Control under communication con-straints,” IEEE Trans. Autom. Control, vol. 49, pp. 1056–1068, July 2004.
[9] G. Zhai, B. Hu, K. Yasuda, and A. N. Michel, “Qualitative analysis of discrete-time switched systems,” in Proc. ACC’02, Jun. 2002, vol. 3, pp. 1880–1885.
[10] M. Jain and S. Lakshminarayanan, “A filter based approach for per-formance assessment and enhancement of SISO control systems,” Ind.
Chem. Eng. Sci., vol. 62, pp. 4644–4658, 2007.
[13] B. Huang, “Minimum variance control and performance assessment of time variant processes,” J. Process Control, vol. 12, pp. 707–719, Apr. 2002.
[14] F. L. Lian, J. R. Moyne, and D. Tilbury, “Network design consideration for distributed control systems,” IEEE Trans. Control Syst. Technol., vol. 10, no. 2, pp. 297–307, 2002.
[15] D. Yue, Q. L. Han, and C. Peng, “State feedback controller design of networked control systems,” IEEE Trans. Circuits Syst., vol. 51, pp. 640–644, Nov. 2004.
[16] N. Kenji and O. Kouhei, “A design method of communication distur-bance observer for time delay compensation,” IEEE Trans. Ind.
In-form., vol. 4, no. 3, pp. 185–197, Aug. 2008.
[17] C. W. Cheng, C. L. Lai, B. C. Wang, and P. L. Hsu, “The time-delay ef-fect of multiple-network systems in NCS.,” in Proc. SICE Annu. Conf.
2007 1C11-4, Takamatsu, Japan, Sep. 18–20, 2007.
[18] C. Peng, D. Yue, and J. Sun, “The study of Smith prediction controller in NCS based on time-delay identification,” in Proc. Int. Conf. Control,
Autom., Robot., Vision, Dec. 2002, pp. 1644–1648.
[19] P. Sourdille and A. O’wyer, “A new modified Smith predictor design,” in Proc. 1st Int. Symp. Inf. Commun. Technol., Sep. 2003, vol. 49, pp. 385–390.
[20] Y. Halevi and A. Ray, “Integrated communication and control system networks: Part I—Analysis,” J. Dynamic Syst., Measure., Control, vol. 110, pp. 367–373, 1998.
[21] M. Y. Chow and Y. Tipsuwan, “Network-based control systems: A tutorial,” in Proc. 27th Annu. Confl IEEE Indl Electrol Socl, 2001, pp. 1593–1602.
Chiao Tung University, Hsinchu, Taiwan.
He was a Senior Engineer at the Hannstar Display Corporation during 2000–2003. In 2003, he joined the SIC Electronic Corporation as a Deputy Manager. From 2004 to 2005, he served as a Senior Engineer of AU Optronics (AUO) Corporation. His research interests include remote mon-itor and networked control systems.
Pau-Lo Hsu (M’91) received the B.S. degree
from the National Cheng Kung University, Tainan, Taiwan, the M.S. degree from the University of Delaware, Newark, and the Ph.D. degree from the University of Wisconsin–Madison, in 1978, 1984, and 1987, respectively, all in mechanical engineering.
He was with San-Yang (Honda) Industry during 1980–1981 and Sandvik (Taiwan) during 1981–1982. In 1988, he joined the Department of Electrical and Control Engineering, National Chiao Tung Univer-sity, Hsinchu, Taiwan, R.O.C., as an Associate Professor. He has been a Pro-fessor since 1995. During 1998–2000, he served as the Chairman of the depart-ment. His research interests include CNC motion control, servo systems, diag-nostic systems, and network control systems.