Face Detection in Color Image using Rectangle Feature
5
0
0
全文
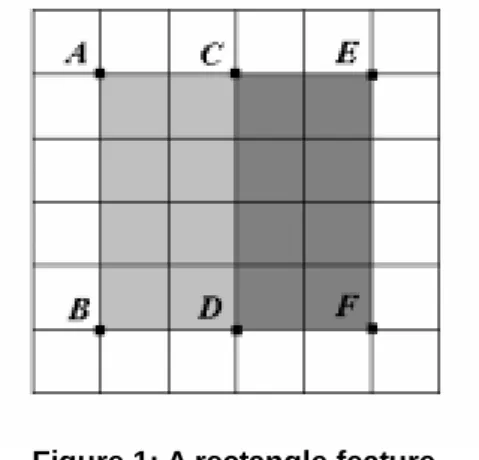
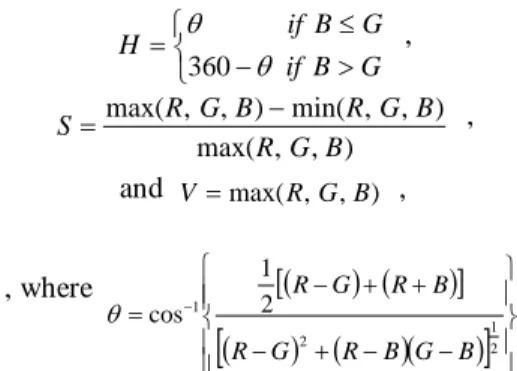
(2) we can determine the presence of this feature.. 2.1 Haar-like Feature The concept of Haar-like feature is proposed by Oren et al. [1] in 1990’s. This concept has being extended with more dimensions and orientations in other systems. The Haar wavelets form a natural set of basis functions which encode differences in average intensity between adjacent regions [11]. Haar-like features works in a similar way to Haar wavelets: they express the relationship between adjacent regions with the difference of the sum of pixel values. In Figure 1, the rectangle feature here is a two-region feature consisting region ABDC and region CDFE. The feature value of a two-region feature is computed as the sum of the brighter region subtracts the sum of the darker region, as indicated in previous section. The simplicity of this formula implies that we can obtain a huge amount of feature values in short time.. 2.2 DC Color Feature We evaluate the plane color feature according to the DC component which is defined in Discrete Fourier Transform (DFT): F ( 0,0) =. 1 MN. M −1 N −1. ∑ ∑ f ( x, y ) x =0. y =0. F is the average pixel value of f (x , y ) if it is an image. Combined with the haar-like features, 8 basic rectangle features used in our system are illustrated in Figure 2. a to g are Haar-like features and h is the smallest DC color feature. These basic features can be modified with different scales and alignments in both vertical and horizontal directions. With the modifications, 8 features can generate over 1 million graphical features in a 24×24 pixel window.. application [7] [9]. In [8], normalized RGB color space and HSV color space has shown themselves to be the better color spaces for skin-color modeling among 5 color spaces: RG, normalized RGB, HS, YQ, and CrCb. With this literal evidence, we applied the defined rectangle features to the normalized RGB color space and HSV color space.. 3.1: Normalized RGB Color Space The normalized RGB color space (also noted as rgb color space) is an improved version of RGB color space. To reduce the brightness effect on each component, we normalize the components as following: r=. B G R , g= , b= R+G+ B R +G + B R+G+B. This representation reduces the dimensionality of RGB color space. As the sum of the three normalized component is known, the third component b can be represented with r and g, which means it holds no significant information and can be omitted. So a normalized RGB is in fact a two-dimensional color space and can be expressed in a plane, in our case, an r-g plane. The normalized RGB color space has two notable properties: 1. the dependency of r and g on the brightness is greatly diminished by the normalization, and 2. with conditions satisfied, normalized RGB color space is invariant to changes of surface orientation related to the light source [10]. With regarding to these properties, normalized RGB color space is chosen to be one of our concerned color spaces.. 3.2: HSV Color Space HSV is another well-known color space. Each component of HSV can be evaluated from RGB with a conversion function as following: if B ≤ G , θ H = 360 − θ if B > G max( R, G, B ) − min( R, G , B ) , S= max( R, G , B ). and V = max( R, G , B) , , where. 1 [(R − G ) + (R + B)] 2 θ = cos 1 (R − G )2 + (R − B )(G − B ) 2 −1. [. ]. . Figure 2: 8 basic rectangle features.. 3: Color Space Color space is a specification of a coordinate system where each color is represented by a single point. By the definition of rectangle feature, the physical feature value changes with the applied color space. A wide variety of color spaces have been applied to the skin-color related. From its nature, HSV color space has the property of explicit discrimination between luminance and chrominance. This property made the HSV color space become widely popular in the researches on color related applications, such as skin-color modeling [9]. In a more constrained environment, the Hue component can be invariant to changing lighting conditions because of its low dependence to brightness [10]. Additionally, [6] [13]. - 1093 -.
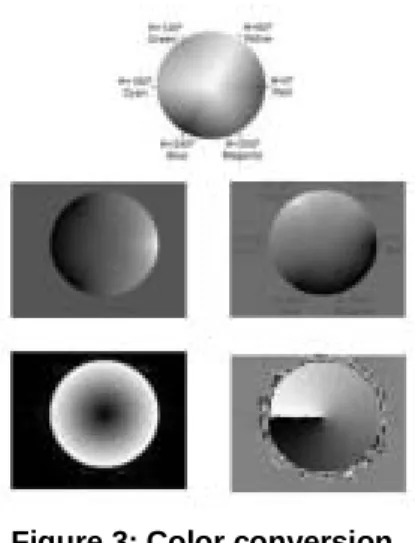
(3) show that HSV has some advantages on skin-color modeling. Considering of both advantages and disadvantages, we propose to apply rectangle features to HS domain in our system. We modify the Hue value range by -180º then remap the Hue function to the range of [0º, 360º], for the reason that red is located at value 180º after modified and thus make our classifier to avoid a threshold near 0º.. We can adjust the thresholds to obtain almost any desired true positive (TP) and false positive (FP) rates. -our system, we set the threshold and the parity equal to the value which classifies the most training examples into proper categories. Most weak classifiers obtained in this way have a detection rate just slightly better than random guess. We are running a boosting algorithm to improve them.. 4.2: AdaBoost Algorithm The whole weak classifier set is too large for detection and not all of them are necessary. Here we apply the AdaBoost Algorithm to select the fittest features and improve them. AdaBoost Algorithm is used to select the most significant features and to discard the lesser important features. Every selected feature (and its related weak classifier) is given a classifying weight according to its error rate. Several weighted classifiers are combined and form a strong classifier and can be expressed as the following: 1 H (x ) = 0 . Figure 3: Color conversion.. T. ∑α t =1. t. h t (x ) ≥. 1 2. T. ∑α t =1. t. otherwise. Figure 3 shows the results of color conversion. In the order of top-left to bottom-right, they are: normalized R, normalized G, Saturation, and Hue.. where T is the number of weak classifiers and αt is its corresponding weight.. 4: Learning Algorithm. 4.3: Cascade Classifier. Base on the rectangle features, we can train our classifiers with one of any known learning algorithms. Here we introduce the detecting frame work developed by Viola and Jones for its processing speed [12].. 4.1: Weak Classifier Recall that each rectangle feature is a threshold function, our very basic classifier called “weak classifier” is constructed accordingly. We define the meaning of notations as: classification function h j , basic feature modifications of position P, scale S, and color space C. Haar-like feature f j has threshold θj and parity pj to form its classification function, and DC color feature c j has 2 bounding thresholds ω j and ωj ' in its classification function. Therefore functions can be expressed as: 1 h haar ( x | P, S , C ) = 0 1 h DC ( x | P, S , C ) = 0. these. threshold. if p j f j (x | P, S , C ) < p jθ j. When new training examples are included, we can repeat the AdaBoost to obtain a new strong classifier. By adding false positive examples into the training set, the latter constructed classifier can help eliminating false positives from previous classifier. Thus, we can align the strong classifiers into a cascade structure, as Figure 4 shows. In the cascade structure, we arrange simple features in the earlier stages to reject the majority of negative sub-images. Simple features consist of lesser classifiers and thus can be processed and passed easily. In this way we can greatly reduce the computational time because the evaluation for the following classifiers does not operate on the majority of input sub-images. Only positive instances which pass the early stage will trigger the more complicated classifiers and then be evaluated. Generally, those complicated classifiers involve more features and have lower false positive rates. Details of implementation are not described here. More comprehensive information about this detecting frame work can be found in [12].. otherwise. 5: System Structure. otherwise. Figure 5 shows the constructing flow of our system. We train weak classifiers with our personal collected examples, then run AdaBoost algorithm to boost these. if ω j < c j (x | P, S , C ) < ω j '. - 1094 -.
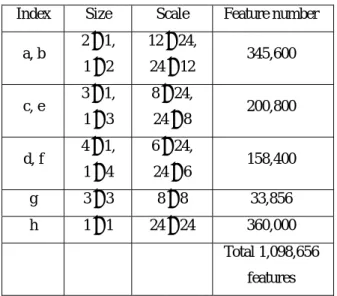
(4) weak classifiers. Finally, we construct the detecting frame work for face detection.. Training Examples. Feature. Input Image Training Weak Learners REJECT. Redundant Weak Classifiers. REJECT. Learning Algorithm. Strong Classifier 1. Strong Classifier 2 REJECT. Strong Classifiers. False Detection. Strong Classifier 3 Training a Cascade of Classifiers Accepted Image. Rejected Image Cascade Classifier. Figure 4: Cascade Classifier. 6: Experiment. Online Detection. The total number of weak classifiers we train is list in Table 1. Our detector is constructed from these classifiers. The first detector we construct is a 4-layers detector, consist 46 modified rectangle features. Color spaces selected by AdaBoost are list in Table 2. We could notice that the features in Hue domain are much more likely being picked by the AdaBoost, which means that the Hue component has more classifying power on human face detection. Face detection results are shown in Figure 6, with computational time varying between 1.6 second to 2.4 seconds (due to image sizes). Figure 7 shows a special result about detecting human faces under low lighting conditions. In Figure 7, we could notice that the face regions are enhanced in different color spaces.. Figure 5: Construction flow of our system.. Layer. Table 2: Color space selected. Red Green Hue Saturation Total. #1. 0. 0. 1. 0. 1. #2. 4. 2. 3. 1. 10. #3. 2. 0. 7. 1. 10. #4. 3. 1. 16. 5. 25. Total. 9. 3. 27. 7. 46. Table 1: The total number of rectangle features. Index. Size. Scale. 2 × 1,. 12 × 24,. 1× 2. 24 × 12. 3 × 1,. 8 × 24,. 1× 3. 24 × 8. 4 × 1,. 6 × 24,. 1× 4. 24 × 6. g. 3× 3. 8× 8. 33,856. h. 1× 1. 24 × 24. 360,000. a, b. c, e. d, f. Feature number 345,600. Figure 7-a: Source image and detection result.. 200,800. 158,400. Total 1,098,656 features. Figure 7-b: Color conversions. From top-left to bottom right are: normalized Red, normalized. - 1095 -.
(5) Green, Hue, and Saturation.. 7: Conclusion We have shown a possibility of constructing a face detection system for color images using a set of rectangle features in different color spaces. Based on these features, we developed a face detection system using non-parametric method that can achieve better accuracy with more training examples. Compare with previous gray-image detecting systems, our system utilizes different color information and, hence, could enhance the detecting ability of the previous systems. We can construct a general frame work for tracking objects in color images. Combined with AdaBoost Algorithm, this non-parametric framework can perform various detecting task efficiently. The classifying power of color information is higher than gray-scale images and worth of practical implementation. Normalized RGB has good lighting invariant properties, so as HSV. Additionally, skin-color has little difference in Hue color space. Combining these advantages, a face tracking application based on color information techniques is more attractive than other applications. The new technique even has the capability to work under dimmed lighting conditions. The experiment results show some robustness of our system. Faces can be found even under bad lighting conditions. However, since additional information is processed, our system is not great in the processing speed. It takes about 1.6 seconds to complete the detection of a 320x240 image. Unlike conventional gray-scale face detections, our system takes one more step to convert the color information through double-precision computations. Thus requires more time than the integer computations used in conventional gray-scale techniques. One might implement color conversions into approximate integer calculation to reduce the computation time. However, the cost of lower accuracy has to be considered. Another possible improvement is to train weak classifiers into two fashions: one for fast rejection and the other for precise detection. The cascade model could be constructed accordingly. Though the detection rate and speed is still not satisfying for now, these problems can be solved with further refinements. Better results could be expected in the future.. [3] Vladimir Vezhnevets Vassili Sazonov Alla Andreeva, “A Survey on Pixel-Based Skin Color Detection Techniques”, Proceedings of Graphicon-2003, pp. 85-92 , 2003. [4] Helman Stern, Boris Efros, "Adaptive Color Space Switching for Face Tracking in Multi-Colored Lighting Environments", Fifth IEEE International Conference on Automatic Face and Gesture Recognition, p. 0249, 2002. [5] Sinha, Edgar Osuna, and Tomosa Poggio, “Pedestrian Detection Using Wavelet Templates”, 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1997. [6] K. Sobottka and I. Pitas, “Extraction of Facial Regions and Features Using Color and Shape Information”, in Proc. of Int. Conf. on Pattern Recognition, 1996 [7] M.H. Yang and N. Ahuja, “Detecting Human Faces in Color Images”, In Proc. of ICIP'98, volume 1, pages 127--130, 1998. [8] Helman Stern and Boris Efros, "Adaptive Color Space Switching for Face Tracking in Multi-Colored Lighting Environments", Fifth IEEE International Conference on Automatic Face and Gesture Recognition, p. 249, 2002. [9] K. Sobottka, I. Pitas. “Looking for Faces and Facial Features in Color Images”, PRIA: Advances in Mathematical Theory and Applications, Vol. 7, No. 1, 1997. [11] Constantine P. Papageorgiou, Michael Oren, Tomaso Poggio, “A General Framework for Object Detection”, Proceedings of International Conference on Computer Vision, 1998. [12] Paul Viola and Michael J. Jones, “Robust Real-Time Face Detection”, International Journal of Computer Vision 57(2), p137-154, 2004. [13] C. H. Lee, J. S. Kim, and K. H. Park, “Automatic Human Face Location in a Complex Background”, Pattern Recog. 29, 1996, 1877–1889.. Reference [1] Michael Oren , Constantine Papageorgiou, Pawan Sinha, Edgar Osuna, and Tomosa Poggio, “Pedestrian Detection Using Wavelet Templates”, 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1997. [2] Paul Viola, Michael Jones, “Rapid Object Detection using a Boosted Cascade of Simple Features”, 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2001. - 1096 -.
(6)
數據
相關文件
Secondly, the key frame and several visual features (soil and grass color percentage, object number, motion vector, skin detection, player’s location) for each shot are extracted and
To improve the quality of reconstructed full-color images from color filter array (CFA) images, the ECDB algorithm first analyzes the neighboring samples around a green missing
For example, both Illumination Cone and Quotient Image require several face images of different lighting directions in order to train their database; all of
The purpose of this paper is to achieve the recognition of guide routes by the neural network, which integrates the approaches of color space conversion, image binary,
A digital color image which contains guide-tile and non-guide-tile areas is used as the input of the proposed system.. In RGB model, color images are very sensitive
For the application of large size flat panel display such as LCD TV, Notebook, Monitor etc, the correlation color temperature can be adjusted via the color image processing circuit
Using the DMAIC approach in the CF manufacturing process, the results show that the process capability as well as the conforming rate of the color image in
Connected Component for CDM image Color Edge Detection. Combine spatial
