BOUSSINESQ TYPE EQUATIONS ON A CIRCLE
Yung-fu Fang1 & Manoussos G. Grillakis2
Abstract. We establish local and global existence results for Boussinesq type equations on a circle, employing Fourier series and a fixed point argu-ment.
0. Introduction and Main Results.
In the present work, we want to consider the question of existence and uniqueness of solutions for Boussinesq type equations
(0.1) utt− uxx + uxxxx+ ∂x2f (u) = 0, x ∈ T, t ∈ R,
where T is the unit circle and f (u) is a polynomial of u and |u|, under minimal regularity assumptions on the initial data prescribed at time t = 0,
(0.2) u(0, x) = u0(x), ut(0, x) = u1(x).
Equations of this type, but with the opposite sign in the fourth derivative, were originally derived by Boussinesq [Bo] in the context of water waves. Zakharov [Z] proposed equation (0.1) as a model of a nonlinear string. Falk et al derived an equation which is equivalent to (0.1) in their study of shape-memory alloys, see [FLS]. In fact, the equation studied in [FLS] is of the following type
(0.3) ett− gexx+ exxxx+ ∂x2f (e) = 0, 1The first author was partially supported by Sloan Fellowship.
2The second author is supported by a PYI, DMS-9157512, and a Sloan Fellowship. Typeset by AMS-TEX
where g is a constant, e = ux is the strain and f (e) = 4e3− 6e5. In general
however f (e) contains a term of the form exp(γe2). McKean studied the complete integrability of the good Boussinesq equation on a circle, see [M]. An interesting observation connecting the Kadomstev-Petviashvili equation with the Boussinesq equation is the following. For the KP equation
(0.4) (ut+ uxxx + uux)x+ uyy = 0,
consider waves that move in the x direction, i.e. u(t, x, y) = v(x − ct, y) and denote ξ = x − ct, thus the KP equation is reduced to
(0.5) vyy− cvξξ + vξξξξ+ ∂ξ2(u2/2) = 0,
which is (0.1) with f (u) = u2/2, and the time variable is now played by the
y direction, see [HP].
Equation (0.1) has certain features that are interesting, the linear equation
(0.6) utt− uxx+ uxxxx= 0
has solutions that are periodic in space but only aperiodic in time. By this we mean that the function is a linear combination of functions with different non integer periods. Also in contrast to the equation on the real line, i.e.
x ∈ R, there is no dispersion and no decay in the time variable.
On the other hand, equation (0.1) can be written as a Hamiltonian system as follows
(0.7)
½
ut = vx,
vt = ux− uxxx− ∂xf (u).
The above equation conserves the energy, namely the integral
(0.8) E = 1
2 Z
T
[v2+ u2+ u2x− 2F (u)]dx,
where F0 = f and F (0) = 0, does not depend on the time t. Another
conserved quantity is the momentum
(0.9) I =
Z T
which turns out to be a relevant quantity in the investigation of stability properties of traveling waves. The conservation of energy can lead to global existence if it is positive definite. However if it is not positive definite, then it is possible to show blow-up in finite time, see [S] and [KL].
Sachs in [S] proved that the “good” Boussinesq equation, which is the equation (0.1) with f (u) = u2, ( the energy E is indefinite in this case ), has solutions that can only exist for finite time for certain initial data ( also see [KL]). The same method applies to equation (0.1) to show that solutions blow-up if the energy is indefinite. Liu extended and refined the blow-up results in [S], see [L]. Some local and global results of the Boussinesq type equation on the real line were shown by F. Linares [Ln].
It was shown by Zakharov, [Z], that the Boussinesq equation, which agrees with (0.1) for f (u) = u2 and with the opposite sign in the fourth derivative term has infinitely many conservation laws and is formally completely in-tegrable. Using the same method, one can show that equation (0.1) is also formally completely integrable. McKean developed a rigorous theory of com-plete integrability for the good Boussinesq equation on a circle.
The fact that Boussinesq type equations have solitary wave solutions has been studied by many authors, see Bona & Sachs [BS], Alexander & Sachs [AS] and Liu [L]. Solitary waves of (0.1) are traveling wave solutions of the form
(0.10) u(x, t) = ϕ(ξ) = ϕ(x − ct),
where c is the speed of the wave and satisfy the ordinary differential equation
(0.11) ϕ00 = (1 − c2)ϕ − f (ϕ); 0 = d
dξ,
with appropriate boundary conditions. The quantity (0.12) (ϕ0)2− (1 − c2)ϕ2+ 2F (ϕ)
is a quadrature and enables us to determine the conditions on F (·) so that equation (0.1) possesses solitary waves, e.g. f (u) = ±u2, f (u) = |u|p−1u if
|c| < 1 and p > 1, f (u) = λ|u|q−1u − |u|p−1u for certain values of λ ∈ R+ and 1 < q < p, . . . etc.
The outline of the paper is as follows, we first establish the local existence of solutions. The main ingredient in the proof is an a priori estimate inspired by recent work of J. Bourgain, see [B1] and [B2], and it can be understood as a multiplier estimate on the set R × Z, ( dual variables in the Fourier transform), where Z is the one dimensional lattice. The proof which we present in chapter 2 is somewhat different from the one in [B1] and we believe it is more transparent. The proof relies on an idea of Zygmund [Zy] and reduces to a counting argument. Related previous arguments in the continuous case can be found in [Fe] and [CS].
Once the local existence is proved, the time interval of existence and the size of the initial data are reciprocal, so that the maximal existence time,
Tmax, can be finite. On the other hand, to prove global existence, we can
use the conservation of energy. This is one of the motivations for the local existence under minimal regularity assumptions on the initial data. The other motivation is related to the construction of invariant measures in the space of solutions.
The main theorems proved in this paper are stated below.
Theorem 0.1. (Local Existence and Uniqueness) Assume that the initial
data (0.2) satisfy u0 ∈ Hs, u1 ∈ H−2+s with 0 ≤ s ≤ 1. Assume also that
|f (u)| ≤ C|u|p and the p and the s satisfy
(0.13) ( p ≤ p(s) = 3−2s 1−2s, if 0 ≤ s < 12; p < +∞ if 1 2 ≤ s.
Then equation (0.1) has a local unique solution.
Theorem 0.2. (Global Existence) Assume that the initial data of problem
(0.1) satisfy u(0, x) ∈ H1, u
t(0, x) ∈ H−1. Let f (u) = λ|u|q−1u − |u|p−1u and 1 < q < p, for any λ ∈ R. Then a unique solution of (0.1) exists for all time. The solution has the same regularity as the local solution and belongs to L4(Rloc× T).
is periodic in x with period L, then calling µ = 2π/L and rescaling in space-time, t → µt and x → µx, we obtain the equation
(0.14) utt− uxx+ µ2uxxxx+ ∂x2f (u) = 0, (t, x) ∈ R × T.
The methods and the corresponding results for equation (0.14) are of course completely analogous to those of equation (0.1). It is interesting however to see how the a priori estimate and the time of existence are influenced by
µ = 2π/L.
1. Local and Global Existence.
Throughout the rest of this paper, we will consider functions of two vari-ables, g(t, x) with t ∈ R the time variable and x ∈ T the space variable. We will denote by ˜g the Fourier transform of the function g with respect to the
space variable and by ˆg the Fourier transform of the function g with respect
to both the space variable and the time variable, i.e. ˜ g(t, ξ) = Z T e−ixξg(t, x)dx and ˆg(τ, ξ) = Z R Z T e−i(xξ+tτ )g(t, x)dxdt.
We will also use the following notation
(1.1)
½
ω(ξ) = pξ2+ ξ4,
S = ||τ | − ω| + 1
and the negative Sobolev space H−k(T) with norm defined as follows.
Definition. H−k(T) is the space of periodic functions u(x) with norm
kukH−k = X ξ∈Z |ˆu(ξ)|2 (1 + |ξ|2)k 1 2 .
Remark. Notice that the space L1(T) is contained in the space H−k(T) for
Our first step is to write the solution of equation, (1.2a) utt− uxx+ uxxxx= g(t, x),
in integral form using Fourier series. The solution can be written as follows.
u(t, x) = tˆu1(0) + ˆu0(0) +X ξ6=0 eixξ µ sin tω ω uˆ1(ξ) + cos tωˆu0(ξ) ¶ +X ξ6=0 eixξ Z t 0 h sin(t − s)ω ω g(s, ξ)˜ i ds, (1.2b) where g(t, x) = −∂2
xf (u) corresponding to equation (0.1). Observe that g(t, x) has average zero, i.e. ˜g(t, 0) = 0. The solution (1.2) can be split into
the linear and nonlinear parts
(1.3) ( U (t, x) =P ξ6=0eixξ ¡sin tω ω uˆ1(ξ) + cos tωˆu0(ξ) ¢ + tˆu1(0) + ˆu0(0), V (t, x) =Pξ6=0eixξRt 0 h sin(t−s)ω ω ˜g(s, ξ) i ds.
The idea of the proof of local existence is to consider the nonlinear map (1.2) and prove that it is a contraction in the appropriate space. The right space in this case is dictated by the equation and it is expressed in the dual variables with the norm
(1.4) N (u) = kS12ukˆ L2(R×Z),
see (1.2). The idea to use the contraction principle with norms like (1.4) is due to Bourgain. However this is not essential for the construction here, alternatively one can use the norm kukL4(R
loc×T), instead of N (u). The heuristic idea of the norm is that one can formally takes Fourier transform over the space and time variables on the both sides of (1.2a) to have
(τ2− ω2)ˆu(τ, ξ) = ˆg(τ, ξ).
Then one can get
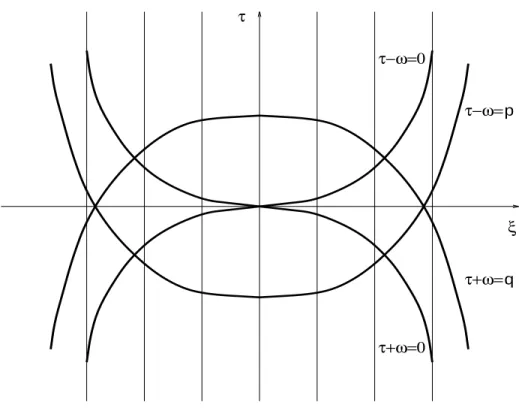
(|τ | − ω)12u(τ, ξ) =ˆ g(τ, ξ)ˆ (|τ | − ω)12(|τ | + ω)
ξ τ τ−ω=0 τ+ω=0 q τ+ω= p τ−ω=
Fig 1. The level curves of |τ | ± ω. and take the L2 norm on both sides.
Observe that the linear part of the solution, U (t, x), is only aperiodic in time, for this reason we have to localize it in time using a cutoff function
ψ(t) which is identically one if |t| ≤ 1 and identically zero if |t| > 2. Denote
by ψδ(t) = ψ(t/δ) its dilation.
In order to handle the term V , see (1.3), consider first the linear equation
(1.5)
½
utt− uxx + uxxxx= g, u(0, x) = 0, ut(0, x) = 0.
Assume that ˜g(t, 0) = 0 for all t. The solution of (1.5), compare with the
expression for V (t, x) in (1.3), can be rewritten as follows
−2u(t, x) =X ξ6=0 ³ ei(xξ+tω) ω Z R eit(τ −ω) − 1 τ − ω ˆg(τ, ξ)dτ − e i(xξ−tω) ω Z R eit(τ +ω)− 1 τ + ω ˆg(τ, ξ)dτ ´ . (1.6)
We want to use cutoff functions to decompose the integrals into parts near and far off the level curves of τ ± ω, see figure 1. For this reason, let us introduce a smooth function ˆa and denote ˆb = 1 − ˆa. Assume that ˆa has support in |τ | < 2R and is identically 1 for |τ | < R. The solution of (1.5) can be decomposed in the following manner
(1.7) u(t, x) = Ψ(t, x) + F (t, x), where (1.8) F =ˆ Ã ˆb(τ − ω) τ − ω − ˆb(τ + ω) τ + ω ! ˆ g ω and (1.9) Ψ = Ψ1+ Ψ2,
with Ψ1 and Ψ2 given by the expressions (1.10a) ˆ Ψ1(τ, ξ) = −δ(τ − ω) ω Z ˆb(λ − ω) λ − ω ˆg(λ, ξ)dλ + δ(τ + ω) ω Z ˆb(λ + ω) λ + ω g(λ, ξ)dλˆ and (1.10b) Ψ2(τ, ξ) =ˆ ∞ X k=1 [δ(k)(τ − ω) ˆG−k(ξ) + δ(k)(τ + ω) ˆG+k(ξ)].
The quantities ˆG±k(ξ) are
(1.11) Gˆ±k(ξ) = i k(2R)k−1 ωk! Z (τ ± ω 2R ) k−1ˆa(τ ± ω)ˆg(τ, ξ)dτ,
where the expressions ˆG±k(ξ) are obtained by expanding in power series the expression ei(τ ±ω)t− 1, see (1.6). Call
(1.12) uδ(t, x) = ψδ(t)Ψ(t, x) + F (t, x)
Theorem 1.1. For uδ given in (1.12) and for 0 < ² < 1, the following estimate holds (1.13) kS12uˆδk L2(R×Z) ≤ Cδ ² 2 ° ° ° °ωSˆg1−² 2 ° ° ° ° L2(R×Z) .
Proof . Straightforward calculations and H¨older’s inequality give the follow-ing bound for the term F
(1.14) kS12F kˆ L2(R×Z) ≤ C R2² ° ° ° gˆ ωS1−²2 ° ° ° L2(R×Z).
Since Ψ1,2 consists of the delta function and its derivatives, we need to lo-calize them in the t variable. Thus consider the convolution of S12Ψ and theˆ Fourier transform of a smooth cutoff function ψδ(t) = ψ(t/δ), and observe
first that
ˆ
ψδ∗ (S
1
2Ψ) = ˆˆ ψδ∗ ˆΨ. Now for the expression S12( ˆψδ∗ ˆΨ) we have
kS12( ˆψδ∗ ˆΨ1)k L2(R×Z) ≤ ³ Z (|τ | + 1) ¯ ¯ ¯ ˆψδ(τ ) ¯ ¯ ¯2dτ ´1 2 · ð ° °Z ˆb(λ − ω) λ − ω ˆ g ωdλ ° ° ° L2(Z)+ ° ° °Z ˆb(λ + ω) λ + ω ˆ g ωdλ ° ° ° L2(Z) ! ≤ C(ψ) ° ° °ˆb(λ)(|λ| + 1) 1−² 2 λ ° ° ° L2(R) ° ° ° ˆg ωS1−²2 ° ° ° L2 ≤ C(ψ) R²2 ° ° ° ˆg ωS1−²2 ° ° ° L2(R×Z). For the term Ψ2, since
k(|τ | + 1)12tdkψδkL2(R) ≤ C(ψ)(2δ)k and k ˆG±kkL2(Z)≤ C (2R)k−1 k! R 1−² 2 ° ° ° ˆg ωS1−²2 ° ° ° L2(R×Z), we get kS12ψˆδ∗ ˆΨ2kL2(R×Z) ≤ X k k(|τ | + 1)12tdkψδkL2(R)(k ˆG− kkL2(Z)+ k ˆG+kkL2(Z)) ≤ C(ψ)e 4RδRδ R²2 ° ° ° ˆg ωS1−²2 ° ° ° L2(R×Z).
Combining the estimates for Ψ1, Ψ2, we have the estimate for Ψ (1.15) kS12ψˆδ∗ ˆΨkL2(R×Z) ≤ Ce 4Rδ R2² ° ° ° gˆ ωS1−²2 ° ° ° L2(R×Z).
Now choose δ = R1 and this completes the proof. ¤ Now we can state the local existence theorem. For simplicity, assume first that u0 ∈ L2, u1 ∈ H−2 and then we will describe the modification needed
in the proof of Theorem 0.1.
Theorem 1.2. Consider the problem
(1.16)
½
utt− uxx+ uxxxx+ ∂x2f (u) = 0, u(0, x) = u0(x), ut(0, x) = u1(x).
Assume that the initial data u0 and u1 satisfy u0 ∈ L2(T) and u1 ∈ H−2(T).
Let |f (u)| ≤ C(|u|q + |u|p), 1 < q < p ≤ 3. Then equation (1.16) has a unique weak solution for t ∈ [−δ, δ], where δ depends on the initial data.The solution for each fixed time t, 0 < t < δ, has same regularity as initial data and belongs to L4(R
(0,δ)× T).
The proof consists of a fixed point argument and an a priori estimate involving Fourier multipliers on the set R × Z. The a priori estimate is stated in the next Theorem.
Theorem 1.3. Let f (t, x) be a function with (t, x) ∈ R × T and denote by ˆ
f (τ, ξ) its Fourier transform, with (τ, ξ) ∈ R × Z. The following estimates hold
(1.17a) kf kL4(R×T) ≤ Ck(||τ | − ω(ξ)| + 1) 3
8f kˆ L2(R×Z) and its dual
(1.17b) ° ° ° fˆ (||τ | − ω(ξ)| + 1)38 ° ° ° L2(R×Z)≤ Ckf kL43(R×T).
Proof of Theorem 1.2. The linear part of (1.16), i.e. U (t, x) can be written tˆu1(0)+ ˆu0(0)+ X ξ6=0 ³ ei(xξ+tω)− ei(xξ−tω) 2iω uˆ1(ξ)+ ei(xξ+tω) + ei(xξ−tω) 2 uˆ0(ξ) ´ ,
from which we can obtain the estimate (1.18) kS12ψˆδ∗ ˆU k L2(R×Z) ≤ C(ψ) ³ ku1kH−2 + ku0kL2 ´ . Call D = C(ψ) ³ ku1kH−2 + ku0kL2 ´ ,
which is a constant depending only on the initial data. Now consider the map T defined by
(1.19) T u(t, x) = ψδ(t)U (t, x) + ψδ(t)Ψ(t, x) + F (t, x).
Notice that (T u)x = T ux. We want to show that T is a contraction under
the norm
N (u) = kS12ukˆ L2(R×Z).
Without loss of generality, we may assume that f (u) = |u|p−1u. Combining
Theorems 1.1 and 1.3 and the estimate for U , we have, for ² = 14,
N (T u) ≤ C(D) + C R²2 ° ° ° fˆ S1−²2 ° ° ° L2(R×Z) ≤ C(D) + C R²2k|u| pk L43(R×T) ≤ C(D) + C R²2kuk p L4(R×T) ≤ C(D) + C R18 N (u)p. (1.20)
By choosing sufficiently large M , we have, for suitable δ and R,
(1.21) N (u) ≤ M =⇒ N (T u) ≤ M,
provided that the following condition holds
C(D) + C R18
Notice that in the estimate (1.15) we make the choice δ ∼ R1. This implies the time interval of existence δ is small if the quantity R is large.
Next, consider the difference T u − T v and denote (1.22) u = Φ + Ψu+ Fu, v = Φ + Ψv+ Fv.
Elementary calculations and the inequality (1.23) ¯ ¯ ¯|u|p−1u − |v|p−1v ¯ ¯ ¯ ≤ C(|u|p−1+ |v|p−1)|u − v|, give (1.24) N (T u − T v) ≤ C R18 ¡ N (u)p−1+ N (v)p−1¢N (u − v).
Therefore, again for suitable δ and R, we obtain
N (T u − T v) ≤ 1 2N (u − v), provided that C R18 ¡ Mp−1+ Mp−1¢≤ 1 2
which can be satisfied by choosing R large for given M . This proves that the map T is a contraction with respect to the norm N (u), hence it has a
unique fixed point. ¤
The above theorem proves that a unique solution exists for finite time. In order to prove that the solution persists for all time, it is necessary to control the L2-norm over the space variable for each fixed time. The norm
(1.26) Q(u) = sup
t ku(t, ·)kL
2
can be estimated as follows. Assume for simplicity that f (u) = |u|p−1u and ² = 1
4, the term F in (1.8) can be estimated as follows
kF (t, ·)k2L2(T)= k ˜F (t, ·)k2L2(Z) ≤ X ξ ÃZ ¯ ¯ ¯ˆb(τ − ω) τ − ω − ˆb(τ + ω) τ + ω ¯ ¯ ¯ξ 2| ˆf | ω dτ !2 ≤X Z ¯¯¯ˆb(τ − ω) τ − ω − ˆb(τ + ω) τ + ω ¯ ¯ ¯2S1−²dτ Z ξ2| ˆf |2 ω2S1−²dτ ≤ C R² ° ° ° fˆ S1−²2 ° ° °2 L2(R×Z). (1.27a)
For Ψ in (1.10), we have kΨ1(t, ·)k2L2(T)= k ˜Ψ1(t, ·)k2L2(Z) ≤ CX ξ ÃZ ˆb2(τ − ω) (τ − ω)2 S 1−²dτ +Z ˆb2(τ + ω) (τ + ω)2 S 1−²dτ ! Z |ξ2f |ˆ2 ω2S1−²dτ ≤ C R² ° ° ° fˆ S1−²2 ° ° °2 L2(R×Z) (1.27b) and kΨ2(t, ·)kL2(T) = k ˜Ψ2(t, ·)kL2(Z)≤ X k tk(k ˆG− kkL2(Z)+ k ˆG+kkL2(Z)) ≤ CX (2Rt) k k!2R R 1−² 2 ° ° ° ξ 2fˆ ωS1−²2 ° ° ° L2(R×Z) ≤ C e2Rt R²2 ° ° ° fˆ S1−²2 ° ° ° L2(R×Z). (1.27c)
For U , see (1.3), we have
kU (t, ·)kL2(T)= k ˜U (t, ·)kL2(Z)≤ C(ku1kH−2 + ku0kL2). (1.27d)
Combining the above results we get the estimate
ku(t, ·)kL2(T)≤ D + Ce 2Rt R2² ° ° ° fˆ S1−²2 ° ° ° L2(R×Z) ≤ D + Ce 2Rt R18 N (u)p. (1.28)
However, the L2-estimate we have for u(t, ·) in (1.28) is not sufficient to show global existence. Choosing R large, δ ∼ 1/R and 1
2M ≡ D so that N (u) ≤ M , we obtain (1.29) ku(t, ·)kL2(T)≤ 1 2M + Ce2Rt R1/8 M p.
This only leads to finite time of existence. At each step we argue the local existence, the time period of existence δn is of the order of 1/Rn and Rn ≥
(2CMp−1
n )8. Using (1.29), we find that the bound on the norm N (u) increases
exponentially, i.e. (1.30) 1 2Mn+1 ≤ ( 1 2 + Ce2RnδnMp−1 n R18 n )Mn ≤ 2nM0.
Hence the maximum time period of existence can be estimated by (1.31) Tmax = X n δn∼X 1 Rn ∼ C M08(p−1) X 1 [28(p−1)]n.
In fact equation (1.16) can blow up in finite time, see [KL], [S] and [L2]. However, if the energy is positive or semipositive definite, one expects a global solution. This implies that we need the initial data in H1 to have a solution for which the energy is well-defined. On the other hand, in order to be able to prove an analog of Theorem 1.2 for general p > 1, it is also necessary to raise the regularity of initial data.
Before proving a global result, we prove the following theorem.
Theorem 1.4. Assume that the initial data in (1.16) satisfy u0 ∈ Hs, u
1 ∈
H−2+s with 0 ≤ s ≤ 1. If |f (u)| ≤ C|u|p and p is an integer, then equation (1.16) has a local unique solution for
(1.32)
(
p ≤ p(s) = 3−2s1−2s, if 0 ≤ s < 12;
p < +∞ if 12 ≤ s.
Remark. Notice that s = 1
4 gives p(s) = 5, see [FLS], where f (u) = 4u3− 6u5; on the other hand, there is no restriction on p if s ≥ 1/2. This is to be expected since H12 can be embedded into Lp for any p < +∞. Notice that u0 ∈ H12 and u1 ∈ H−
3
2 will give a local weak solution such that the momentum
(1.33) I =
Z T
uvdx
is well defined and conserved for all time.
To prove the theorem we need a lemma for the chain rule and Leibniz’s rule for fractional derivatives. In particular, we need the following proposition from [CW].
Proposition 1.5. (Christ & Weinstein) Suppose that F ∈ C1(C), s ∈ (0, 1), 1 < p, q, r < ∞, and r−1 = p−1 + q−1. If u ∈ L∞(R), Dsu ∈ Lq, and F0(u) ∈ Lp, then Ds(F (u)) ∈ Lr and
Let s ∈ (0, 1), 1 < r, p1, p2, q1, q2 < ∞, and suppose r−1 = p−1i + q−1i , for i = 1, 2. Suppose that f ∈ Lp1, Dsf ∈ Lp2, g ∈ Lq2, Dsg ∈ Lq1. Then Ds(f g) ∈ Lr and (1.35) kDs(f g)kr ≤ Ckf kp1kD sgk q1 + kgkq2kD sf k p2.
Proof of Theorem 1.4. We will only give an outline of the proof. Let (1.36) ∂su(t, x) = F−1{|ξ|su(τ, ξ)},ˆ
where F−1 is the inverse Fourier transform in the t, x variables. We want to
estimate the nonlinear terms using the norms (1.37) N (u) = kS12ukˆ
L2 and Q(u) = sup
t kF
−1(|ˆu|)(t, ·)k L2.
Estimate (1.17) in Theorem 1.3 implies that kukL4 ≤ CN (u). On the other hand, Sobolev’s inequalities give
(1.38) ³ Z ³ Z |u|1−4s4 dx ´1−4s dt ´1 4 ≤ CN (∂su), (1.39) sup t ³ Z |u|1−2s2 dx ´ ≤ C ³ sup t k∂ su(t, ·)k L2 ´ 2 1−2s .
For the linear Boussinesq equation
(1.40) (∂su)tt− (∂su)xx+ (∂su)xxxx= h,
we have estimates like (1.13) and (1.28) combined with (1.17b) for N (T ∂su)
and Q(T ∂su), these imply
(1.41) N (T ∂su) + Q(T ∂su) ≤ C + C R18 k ˆh ωS38 kL2 ≤ C + C R18 kF−1³ ˆh ω ´ k L43, where R can be arbitrarily large.
In the point of view of (1.34), the nonlinear term of (1.16) after taking s derivatives is essentially like
( see [KPV] or [CW]).
Using the fact that N (F−1(|ˆu|)) = N (u) and H¨older’s inequality, the L4 3
norm of up−1∂su can be estimated as follows.
Z Z |F−1(|ˆu|)|(p−1)43|v|43dxdt ≤ C ³ Z Z |F−1(|ˆu|)|2p−2dxdt ´2 3³ Z Z |v|4dxdt ´1 3 .
The second term on the right hand side is bounded by h
N (∂su)i
4 3
. For the first term on the right hand side, we consider the integral over the x variable first, then write 2p − 2 = 4 + 2(p − 3) and use H¨older’s inequality to get
³ Z |F−1(|ˆu|)|4|F−1(|ˆu|)|2(p−3)dx´ ≤ ³ Z |F−1(|ˆu|)|1−4s4 dx ´(1−4s) · ³ Z |F−1(|ˆu|)|2(p−3)4s dx ´4s , (1.43)
where the inequality exponents are r = 1
1−4s, r0 = 4s1 for s < 14.
Using (1.39) to control the right-most term in (1.43), we need the condition 2(p−3)
4s ≤ 1−2s2 which implies that
(1.44) p ≤ 3 + 4s
1 − 2s =
3 − 2s
1 − 2s = p(s),
so that it can be bounded by Q(∂su)2(p−3). Using (1.38), the middle term in (1.43) can be bounded by N (∂su)4.
Hence, we have the following inequality (1.45)
Z Z
|F−1(|ˆu|)|(p−1)43|∂su|34dxdt ≤ Q(∂su)43(p−3)N (∂su)4, Combine (1.41) and (1.45) we have
(1.46) N (T ∂su) + Q(T ∂su) ≤ C + C R18
Q(∂su)p−3N (∂su)3; and similar calculations give
(1.47) N (T u) + Q(T u) ≤ C + C R18
At this stage it is natural to define the norm
(1.48) N1(u) = N (u) + Q(u) + N (∂su) + Q(∂su).
Combining (1.46) and (1.47) we get the inequality
(1.49) N1(T u) ≤ C(D) + C
R18
N1(u)p.
To estimate the difference T u − T v, i.e. to estimate
|∂s(|u|p−1u) − ∂s(|v|p−1v)|,
we use (1.35) which is a version of Leibniz’s rule ( see [CW]) to get (1.50) N1(T u − T v) ≤ C R18 ³ N1(u)p−1+ N1(v)p−1 ´ N1(u − v).
Therefore we can choose suitable δ and R so that T is a contraction. ¤ Corollary 1.5. Assume that u0 ∈ H1 and u
1 ∈ H−1. Let |f (u)| ≤ C(|u|q+
|u|p), where p and q are two numbers greater than 1. Then equation (1.16) has a unique weak solution for t ∈ [−δ, δ], where δ depends on the initial data.
The global existence of a solution can be obtained from the conservation of the energy. Since the energy
(1.51) E = 1 2 Z T [v2+ u2+ u2 x− 2F (u)]dx.
is conserved we can continue the solution for all time using Corollary 1.5, provided that f (u) = λ|u|q−1u − |u|p−1u, q < p, i.e.
(1.52) F (u) = λ
q + 1|u|
q+1− 1 p + 1|u|
p+1,
so that F (u) < 0 for |u|p−q > λ(p+1)
q+1 . The energy gives the estimate
(1.53) 1 2 Z T v2+ u2+ u2xdx ≤ E + Z |u|p−q<λ(p+1) q+1 F (u)dx ≤ E + C(λ, p, q).
Theorem 1.6. Assume that in equation (1.16) the initial data satisfy that
u0 ∈ H1, u1 ∈ H−1. If f (u) = λ|u|q−1u − |u|p−1u for 1 < q < p, λ ∈ R,
then the problem (1.16) has a global unique solution u such that u and ∂xu are in the space L4(Rloc× T).
2. A Priori Estimates.
This part of the paper is devoted to the proof of Theorem 1.3 which we restate below. The method of proof is actually quite general and depends only on the geometric properties of the level curves given by ω(ξ1) + ω(ξ2) = constant, see (2.1b).
Theorem 2.1. Let f (t, x) be a function with (t, x) ∈ R × T and denote by ˆ
f (τ, ξ) its Fourier transform, with (τ, ξ) ∈ R × Z. The following estimate holds (2.1a) kf kL4(R×T) ≤ CkS 3 8f kˆ L2(R×Z), where (2.1b) S = (||τ | − ω(ξ)| + 1) and ω(ξ) =pξ2+ ξ4.
Remark. The dual of (2.1a) is
(2.1c) ° ° ° fˆ S38 ° ° ° L2 ≤ Ckf kL 4 3
and can be proved by a standard duality argument.
In the general case, considering the Boussinesq equation with different pe-riod will require to rescale space and time and can be reduced to an equation of the form
utt− c2uxx+ µ2uxxxx+ g = 0.
Obvious modifications in the proof of Theorem 2.1 yield the following corol-lary.
Corollary 2.2. Let f (t, x) be a function with (t, x) ∈ R × T and denote by ˆ
f (τ, ξ) its Fourier transform, with (τ, ξ) ∈ R × Z. Now call ωµ=
p
c2ξ2+ µ2ξ4 and S
µ = ||τ | − ωµ| + 1. The following estimate holds
(2.2) kf kL4 ≤ CkS 1 4 µf kˆ L2 + C √ µkS 3 8 µf kˆ L2.
Proof of Theorem 2.1. Without loss of generality we can assume that the support of ˆf (τ, ξ) is inside the set
{(τ, ξ) : τ ≥ 0, τ − ω(ξ) ≥ 0},
because otherwise we can split the function ˆf (τ, ξ) into a finite sum of
func-tions, each supported in one set of the above type and the proof is similar for each set. Next we want to make a dyadic decomposition of ˆf (τ, ξ) along the
variable p = τ − ω(ξ), in order to achieve this, consider a smooth function ˆa(p) with support in the interval [12, 2] such that
∞
X
j=−∞
ˆa( p
2j) = 1 if p 6= 0.
Call ˆaj(p) = ˆa(2pj) and
ˆa0(p) = 1 − ∞ X j=1 ˆaj(p). Denote 4j = [2j−1, 2j+1]
a dyadic interval, and write ˆ
fj(τ, ξ) = ˆaj(τ − ω(ξ)) ˆf (τ, ξ).
Now we can write
f = ∞
X
j=0 fj
and the estimate (2.1) will follow from the inequality (2.3) kfjfkkL2(R×T) ≤ C 218|j−k| kS38fˆjkL2kS 3 8fˆkkL2,
by squaring f , taking the L2 norm and using the triangle inequality and Cauchy-Schwartz. In order to show (2.3) we compute the Fourier transform of fjfk (2.4a) (fjfk)(t, x) = Z dτ1dτ2 X ξ1ξ2 eiΩfˆj(τ1, ξ1) ˆfk(τ2, ξ2), where (2.4b) Ω = t(τ1+ τ2) + x(ξ1+ ξ2).
Without loss of generality, we can assume that k ≤ j. Make the change of variables (2.5a) ½ τ = τ1+ τ2, ξ = ξ1+ ξ2; pi = τi− ω(ξi) i = 1, 2. and call (2.5b) p = p1+ p2, q = p2. Formula (2.4) can be written as
(2.6) (fjfk)(t, x) = F{ ˆGjk(τ, ξ)}, where (2.7a) Gˆjk(τ, ξ) = Z 4k dq X p∈Λj ( ˆfjfˆk)(τ, ξ, p, q)
and the set Λj(τ, ξ, q) is a discrete set defined by
(2.7b) Λj(τ, ξ, q) = {p ∈ 4j + q : ξ1,2(τ, ξ, p, q) ∈ Z}.
Remark. Notice that ξ1,2 are computed by solving the system of equations, ½
ω(ξ1) + ω(ξ2) = τ − p,
with respect to ξ1, ξ2. If we call X = ξ1 − ξ2, the above system can be rewritten as (τ − p)4+ X2ξ2³1 +X2+ ξ2 2 ´2 − (τ − p)2hX2+ ξ2+(X2+ ξ2) 4 + X 2ξ2i= 0. Solving the above equation gives a root X(τ − p, ξ) and we require that
ξ ± X ∈ 2Z,
which forces p to take discrete values.
Plancherel’s theorem in equation (2.6) gives (2.8) kfjfkkL2 = k ˆGjkkL2.
To estimate the right hand side of the above equation, observe first that (2.9) | ˆGjk|2 ≤ 2k|Λj(τ, ξ, q)| Z 4k dq X p∈Λj | ˆfj|2| ˆfk|2.
The crucial observation here is that the size of Λj is much better than what
one should normally expect.
Claim. There exists a constant C such that
(2.10) sup
τ,ξ,q
|Λj(τ, ξ, q)| ≤ C2
j
2.
The proof of the claim will be given at the end. Assuming the claim, we have
Z dτX ξ | ˆGjk|2 ≤ C2k2 j 2 Z dτ dqX ξ,p | ˆfj|2| ˆfk|2
and the right hand side of the above can be rewritten as
C 1
214(j−k)
234j234kk ˆfjk2
L2k ˆfkk2L2,
in view of (2.9) and (2.10), which is exactly the right hand side of (2.2). This
Proof of Claim. In order to prove the claim, notice first that Λj depends
only on ξ and τ − q hence (2.11)
Λj(ξ, A) = {(ξ1, ξ2) ∈ Z2 : ξ1+ ξ2 = ξ, A ≤ ω(ξ1) + ω(ξ2) ≤ A + 3 · 2j−1}, where A = τ − q − 2j+1 and consider the level curves of ω(ξ1) + ω(ξ2) in R2 given by
(2.12) K(A) = {(ξ1, ξ2) ∈ R2 : ω(ξ1) + ω(ξ2) = A}.
We assert that the radius of the inscribed and circumscribed circles to the above curve K(A) are given by
(2.13) ½ r2 max= (−1 + √ 1 + 4A2)/2 r2 min = −1 + √ 1 + A2.
To see this use a parametric representation of the curve q ξ2 1 + ξ14 = A cos2θ , ξ21 = 1 2(−1 + p 1 + 4A2cos4θ); q ξ2 2 + ξ24 = A sin2θ , ξ22 = 1 2(−1 + p 1 + 4A2sin4θ).
Let r(θ) denote the distance between the point (ξ1, ξ2) and the origin, thus (2.14) r2(θ) = ξ12+ ξ22 = −1 + 1
2 ³p
1 + 4A2cos4θ +p1 + 4A2sin4θ´ and its derivative is
(2.15) dr 2(θ)
dθ = 4A
2sin θ cos θnp sin2θ
1 + 4A2sin4θ − cos2θ √ 1 + 4A2cos4θ o ≤ 0
with equality only if θ = 0 or θ = π4. Because of the symmetries of the curve
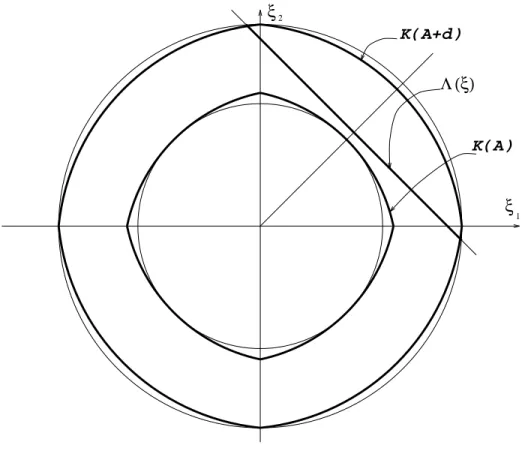
K(A) it is enough to consider θ ∈ [0,π4]. Notice that θ = 0 implies ξ2 = 0 while θ = π4 implies ξ1 = ξ2. See figure 2.
Call L(ξ) the line perpendicular to the line ξ1 = ξ2 at the point ξ = ξ1+ξ2, see figure 2, then Λj(ξ) is the number of lattice points on L(ξ) between the
curves K(A) and K(A + d) with d = 322j. Observe that for fixed A
ξ2 1 K(A+d) (ξ) ξ Λ K(A)
Fig 2. The level curves of K(A).
where ˜Λj is the lattice points belonging to the intersection of L(ξ) with the
annulus (2.17) n(ξ1, ξ2) ∈ Z2 : −1 + p 1 + A2 ≤ ξ2 1+ ξ22 ≤ −1 +p1 + 4(A + d)2 2 o .
Call P (ξ, A) the length of the intersection of L(ξ) with the annulus in (2.17). The maximum length of P (ξ, A) as ξ varies, is achieved when ξ2/2 = −1 +
√
1 + A2, see figure 2. Now P (ξ, A) can be estimated
(2.18) P2(ξ, A) ≤ 2(1 +p1 + 4(A + d)2− 2p1 + A2), from which it follows that
(2.19) sup ξ P (ξ, A) ∼ sup ξ |Λj(ξ, A)| ∼ C2 j 2.
Remark. Notice that if A is large, namely A À d, where A = τ − q − 2j−1,
then the thickness of the annular region defined in (2.17) can be estimated by
(2.20) 4R ∼ 2
j A
which means that for τ large the annular region is very narrow. On the other hand, P (ξ, A) can be estimated for different ξ as follows:
If q −1 +p1 + A2 ≤ |ξ| ≤ q −1 +p1 + A2+ 4R, then (2.21) |P (ξ, A)| ∼ 22j. If |ξ| ≤ q −1 +p1 + A2, then after some straightforward calculation we obtain
(2.22) |P (ξ, A)| ≤ C 2
j A34 which implies |Λj(ξ)| ≤ 1, provided that A > 2
4
3j. This indicates that the estimate in Theorem 2.1 could be extended for Lp with 4 ≤ p < 6 and Sα
with 3
8 ≤ α < 12. This is a similar conjecture to the one which made by Bourgain in [B1].
Interpolating between (2.1a) and Plancherel’s formula, one can prove the following.
Corollary 2.3. With the same assumptions and notations as in Theorem
2.1 the following estimate holds
(2.23) kf kLp ≤ CkSαf kˆ L2, where 2 ≤ p ≤ 4 and α = 34 − 2p3 .
References
[AS] J. C. Alexander & R. Sachs, Linear instability of solitary waves of
Boussinesq-type equation: A computer assisted computation (preprint).
[B1] J. Bourgain, Fourier transform restriction phenomena for certain lattice subsets
and applications to nonlinear evolution equations. Part I Schr¨odinger equations,
Geometric and Functional Anal. 3 (1993), 107-155.
[B2] , Fourier transform restriction phenomena for certain lattice subsets and
applications to nonlinear evolution equations. Part II The KdV equations,
Geo-metric and Functional Anal. 3 (1993), 209-262.
[Bo] M. J. Boussinesq, Th`eory des ondes et des remous quise propagent . . . , J. Math. Pure Appli. sect 2 117 (1872), 55-108.
[BP] E. Bombieri & J. Pila, The number of integral points on arcs and ovals, Duke Math. J. 59 (1989), 337-357.
[BS] J. Bona & R. Sachs, Global existence of smooth solutions and stability of solitary
waves for a generalized Boussinesq equation, Comm. Math. Phys. 118 (1988),
15-29.
[CS] Lennart Carleson & Per Sj¨olin, Oscillatory integrals and a multiplier problem for
the disc, Studia Math. 44 (1972), 287-299.
[CW] F. M. Christ & M. I. Weinstein, Dispersion of Small Amplitude Solutions of the
Generalized Korteweg-de Vries Equation, J. Funct. Anal. 100 (1991), 87-109.
[F] F. Falk, Ginzburg-Landau Theory and Solitary Waves in Shape-Memory Alloys, Z. Phys. B-Condensed Matter 54 (1984), 159-167.
[Fe] Charles Fefferman, Inequalities for strongly singular convolution operators, Acta Math. 124 (1970), 9-36.
[FLS] F. Falk & E. W. Laedkl & K. H. Spatschek, Stability of solitary-wave pulses in
shape-memory alloys, Physical Review B 36 (1987), 3031-3041.
[HP] M. Haragus & R. Pego, in preparation.
[KL] V. K. Kalantarov & O. A. Ladyzhenskaya, The occurrence of collapse for
quasi-linear equation of parabolic and hyperbolic types, J. Sov. Math. 10 (1978), 53-70.
[KPV1] Carlos Kenig & Gustavo Ponce & Luis Vega, Small Solutions to nonlinear Schr¨ o-dinger Equations, Ann. Inst. H. Poincar´e Anal. Non Lineaire 10 (1993), 255-288.
[KPV2] , Well-posedness and scattering results for the generalized Korteweg de
Vries equations via the contraction principle, Comm. Pure Appl. Math. 46 (1993),
527-620.
[L1] Y. Liu, Instability of solitary waves for generalized Boussinesq equations, J. Dyn. Diff. Eq. 5 (1993), 537-558.
[L2] , Instability and blow-up of solutions to a generalized Boussinesq equation (preprint).
[Ln] Felipe Linares, Global Existence of small solutions for a generalized Boussinesq
Equation, J. Diff. Eq. 106 (1993), 257-293.
[LS] E. W. Laedkl & K. H. Spatschek, Thresholds and growth times of some nonlinear
field equations, Physica 5D (1982), 227-242.
[M] H. P. McKean, Boussinesq’s equation on the circle, Comm. Pure Applied Math. 34 (1981), 599-691.
[S] R. L. Sachs, On the blow-up of certain solutions of the “good” Boussinesq
equa-tion, Applicable Anal. 34 (1990), 145-152.
[Z] V. E. Zakharov, On stochastization of one-dimensional chains of nonlinear
[Zy] A. Zygmund, On Fourier Coefficients and Transforms of Functions of Two
Vari-ables, Studia Math. 50 (1974), 189-201.
Department of Mathematics, University of Maryland College Park, MD 20742