延長無線感測網路上目標覆蓋生命週期
索維廷 俞征武 吳建意 中華大學 中華大學 中華大學
[email protected] [email protected] [email protected] 摘要―本論文是在無線感測網路上以調整感測半徑 和搭載行動載具來延長目標監控的生命週期。目標監控的 問題近幾年也成為大家都在探討的問題。雖然有人證明為 NP-complete 的問題,有許多學者將此問題轉換成其他問 題,例如最大資料流量是考慮到目標監控的資料傳輸的電 量消耗問題,只有考慮到將感測資料回傳到基地台,並沒 有考慮到感測時所消耗的電量。我們會先針對無行動載具 的無線感測網路的監控問題討論,找出幾個有關影響演算 法效能的因素,並提出我們的演算法,以模擬實驗來比較 各種演算法效能,實驗結果中,考慮較多因素的演算法會 達到預期的效果。行動式無線感測網路我們提出了一個演 算法給搭載行動載具的感測器去計算是否該移動,並且往 哪裡移動,我們發現電量的多寡對於行動載具的感測器是 相當重要的。 關鍵詞―感測半徑、行動式感測器、目標監控
一、簡介
近 年 來無 線 感測 網路 因為 技 術層 面的 提 升,吸引了各方面的研究和廣泛的應用。無線感 測網路的感測器特性是體積小、成本低、低電量 消耗,並且可以感應自身周圍的環境,並且能將 自身感測到的資料與在自己通訊半徑內的感測 器透過無線傳輸協定(如:zigbee)做資料的傳輸。 無線感測網路可以感測和處理環境的資料並且 可以透過無線網路將資料傳遞給鄰近的感測點 [5]。無線感測網路可以用在許多用途上,像是健 康照顧、軍事用途和監控系統上。例如在健康照 顧上,我們可以在老人、病人或是幼童的身上或 是可以攜帶的配件上加上感測器,用來觀察他們 的身體狀況。在軍事用途上,我們可以在戰場上 部署無線感測器來偵測敵人車輛或是軍隊的移 動[3],或是在建築物裡部署感測點來確保安全性 和夜間監視。 而無線感測網路的電源是裝備電池來當能 源使用,所以每個感測器的電量是有限制的,如 何去有效的利用這有限的資源一直是一個很重 要 的議題 。這 些議題 包含如何媒 介存 取 控制 (medium access control)[9, 10]、節省電源(power saving)[5]、目標追蹤(target tracking)、網路的資 料傳送路徑(routing)[16]之方式、網路的覆蓋問題 (coverage)[3, 12]、網路的連結強度等。通常覆蓋問題可以大致上區分成三個大議 題來做探討:目標覆蓋問題(Targets Coverage Problem)、區域覆蓋問題(Area Coverage Problem) 和柵欄覆蓋問題(Barrier Coverage Problem)。
以上三個大議題之中,區域覆蓋問題(Area Coverage Problem)在近年來已經有許多學者提 出很好的解決方式[7, 11]。另外兩個問題在最近 也被許多學者討論與研究中[4, 14, 15]。 我們假設感測器的感測半徑的大小和電量 消耗的大小有關係,距離越遠所需的電量會越 大,假設可以搭載多個感測元件[1]而使感測器的 感測半徑與電量消耗成一個線性關係(和距離平 方正比)[13],如此就可以開啟感測半徑較小的元 件以達到節省電源的目的。 近年來也有人在研究如何將感測器搭載行 動載具,使得在異質感測網路下全域覆蓋的監控
時間更久[18],或是讓路由可以更有效率[2]等 等,所以我們打算將行動載具概念套用在目標監 控這問題上,使目標監控的時間是否能夠再更延 長。我們會針對可調整感測半徑和行動式無線感 測器來做研究,而模擬實驗也得知,這兩個要件 是延長整體無線感測網路目標監控的因素。
二、相關成果
在[12]中,Shih 等推廣解決前人集合涵蓋問 題的技巧,提出在解決多重感測元件之異質型無 線 感 測 網 路 上 的 目 標 點 覆 蓋 問 題 (Target Coverage Problem)。該論文提出,剩餘電量優先 考量式演算法(Remaining Energy First Algorithm, REFA),REFA 將使感測器以本身電量的多寡來 決定是否開啟感測元件。為進一步提升感測器間 能量消耗的平衡,該論文又提出能源效率優先考 量 式 演 算 法 (Energy Efficient First Algorithm, EEFA)。Cardei 等在[14]中探討目標點覆蓋問題,且 以二分圖(Bipartite Graph)表示無線感測器與目 標點之間的覆蓋關係。將目標點覆蓋問題轉化成 最 大 化 集 合 涵 蓋 問 題 (Maximum Set Cover Problem),目的是為了使網路的存活時間達到最 大,並以提出線性規劃為基礎的啟發式演算法與 集中式的貪婪演算法。此篇也證明在單一感測元 件下的最大化集合涵蓋問題是一個 NP-complete 問題。此篇論文的假設是,當一個感測器開啟, 它的感測距離都是開啟到最大。 在[15]中 Cardei 等探討目標點覆蓋問題。假 設每一個感測器都搭載著兩個感測元件,可以開 啟不同的距離。開啟距離遠近的不同,會造成電 量消耗的不同。由於距離遠近可以調整,也可以 找到更多的覆蓋集合。此篇在探討如何調整無線 感測器的感測距離以解決目標點覆蓋問題。他們 的方法利用二分圖(bipartite graphs)來表示無線 感測器與目標點之間的覆蓋關係。並將此問題轉 換 成 可 調 整 範 圍 之 集 合 覆 蓋 問 題 (adjustable range set cover problem),由於感測半徑的調整, 可以找出更多的覆蓋集合。首先以整數線性規劃 (Integer Linear Programming,簡稱 ILP)建構問題 的 模 型 , 再 提 出 以 線 性 規 劃 (Linear Programming,簡稱 LP)為基礎的啟發式演算法, 與包含集中式及分散式的貪婪演算法,進而延長 網路的存活時間。 在[13]中,作者提出了在不同的感測元件和 每個目標物都有相同數量不同性質待測屬性的 情 況 下 , 使 用 剩 餘 電 量 優 先 考 量 式 演 算 法 (Remaining Energy First Algorithm, REFA)和能源 效 率優先 考量式演算 法 (Energy Efficient First Algorithm, EEFA)概念,提出了兩個相同名字的 分 散式演 算法,此問 題雖然 也是目標覆 蓋問 題 ,但是條件是在目標物都有相同數量不同性 質待測屬性的情況下,感測器不一定會有全部的 感測元件,利用感測器的感測元件在它鄰近的感 測器之中的重要性來決定感測器開啟的先後順 序。 在[8, 17] 中,此兩篇論文都考慮到行動式的 感測網路,其中[17]作者提出了以行動式的感測 器,依據資料傳輸的斷點來做行動式的感測網路 移動的位置,而並非隨機的移動,隨機的移動可 能會造成多餘的電量消耗。在[8]之中作者提出了 一個分散式的演算法,撒下去的行動式感測器根 據作者的演算法移動到達成區域覆蓋。
三、靜態感測網路之目標覆蓋問題
接下來,我們會先針對每一個感測器並無搭載行動載具的狀況去介紹我們所設計出來的演 算法以及會影響整體監控生命週期長度的因素 狀況分析,而會影響到最明顯的就是在演算法中 考慮到電量的因素。 我們假設每一個感測器所搭載的感測元件 是有 R-C 個,R 是最大的感測半徑,C 是開啟感 測元件至少要消耗的電量。每一個感測的半徑差 為一單位長度,所以我們可以視為每一個感測器 的感測半徑為可完整調整到與目標物的距離相 同,感測器消耗的電量與距離的平方正比[15], 一個感測器可同時感測到在感測半徑內多個目 標物。 設計有效的排程方法使整個網路存活時間 延長是本節的目標。以下幾個演算法都是集中式 演算法。其中大致上分為 Greedy Algorithm I、 Greedy Algorithm II 、 Greedy Algorithm III 、 Maximum Weighted Matching Algorithm 和 Estimated Lifetime Algorithm,每一個的特性都有 些許的不同。 設計感測器監控目標物的演算法影響到生 命週期下列許多的因素,包括: 1. 一個感測器監控到目標物數目。 2. 感測器電池剩餘電量。 3. 平衡感測器的電量消耗:考慮感測器電量消 耗的情況。 4. 感測器與目標物之間的距離。 5. 感測器移動所消耗之電量。 6. 感測器分佈之情況。 7. 目標物分佈之情況。 在這一節沒有探討到可移動的感測點,所以 我們在這針對我們提出的演算法考慮的因素做 列表,也就是前四項因素列表如下: 表 I:影響的因素 一 個 感 測 器 監 控 到 目 標 物 數 目 感 測 器 電 池 剩 餘電量 感 測 器 整 體 電 量 消 耗 平 衡 狀 況 感測器 與目標 物之間 的距離 Greedy I No No No No Greedy II No Yes No Yes Greedy III No Yes Yes Yes MWM No Yes Yes Yes LEA Yes Yes Yes Yes
首先介紹三個比較典型的貪婪演算法,與前 人的直覺想法類似[15],在此我們拿來比較這三 個貪婪法不同的地方。[15]探討是感測半徑固 定,當感測器開啟時就是最大的感測半徑。貪婪 演算法(Greedy algorithm I)的做法一開始先去對 目標物做檢查的動作,判斷該目標物是否已被監 控,若沒有,則會去找任意一個在感測半徑內且 電 量足夠 的感測器做 開啟監 控此目標物 的動 作,倘若感測器監控的範圍內還有未監控的目標 物則會標記成已被監控,然後在陸續找尋是否有 目標物上未被監控,直到所有的目標物都被監控 才結束。 直覺來說,當感測半徑不做任何調整時,所 消耗的電量會比有調整時來的大。所以,最簡單 的改進方式就是調整感測半徑。而在這篇論文 中,我們假設感測半徑是可以剛好調整到所要監 控的目標物距離相等的整數情況下去做實驗的 模擬(Greedy algorithm II)。
除了調整感測半徑外,對於感測器的選擇上 我們也做了些調整。感測器會找其中一個距離目 標物最近的且電量是鄰居之中最大的感測器開 啟,這樣可以考慮到感測器電池剩餘電量的平衡 狀況,進而延長感測網路的目標覆蓋生命週期。 在實驗模擬中我們對此三種方式會去做一個探 討 。下表 II 為改進後的貪婪演算法。 Greedy Algorithm III中會用到的符號作如下的介紹: Ti:所要監控的目標點。 Sj:可以調整監控 Range 大小的感測器。 i:目標點編號 i=1~n。 j:感測器編號 j=1~m。 R:Sensor 最大感測半徑。 Ej:感測器 j 剩餘的電量。 lifetime:計算網路存活時間的一個變數,從 0 開 始,直到有一個目標不能被感測器監控 為止。
表 II:Greedy Algorithm III
Step 1:依序檢查目標Ti 是否被覆蓋,如果是, 換下一個目標,回到Step 1;否則繼續Step 2。 Step 2:是否有Sj尚未開啟且存在於Ti 的R半徑範 圍內,有就到Step 3;沒有就找下一個目 標,回到Step 1。 Step 3:Sj 的剩餘電量Ej 是否足夠開啟到Ti,且 剩餘電量為Sj之中最多的,如果是則紀 錄Sj 回到Step 3; 3.1:找到Step 3中紀錄Sj電量是最大或是距離 Ti最短的Sj,開啟Sj到Ti的感測半 徑大小。 Step 4:檢查在Sj 開啟到Ti 的範圍內是否有其他 未被監控的Target ,有就將其狀態改成 已監控。若是所有的Target都檢查完就到 Step 5;否就回到Step 1。 Step 5:檢查是否全部Target都被監控,如果是則 lifetime++且回到Step 1;否則結束。 兩個主要影響網路監控時間的因素為完全 覆蓋和一個感測器監控到一個目標物,我們要來 利用這兩個概念,使用一個很傳統的圖論技巧- maximum matching algorithm [6]來解決此問題。
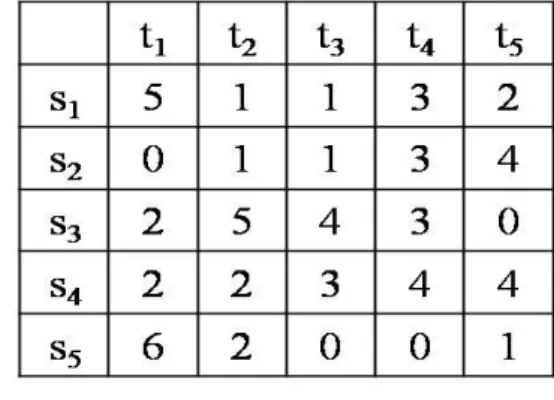
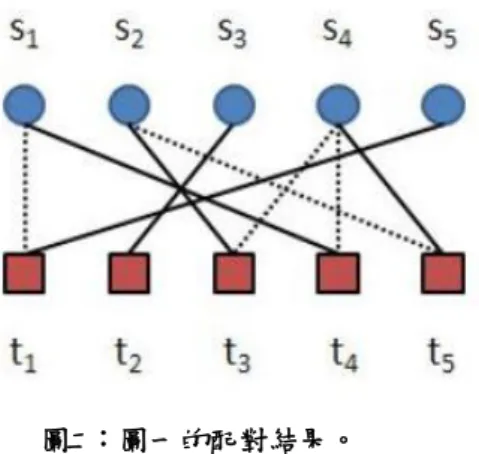
以 下我們 對於轉換成 配對問 題 (Maximum Weighted Perfect Matching)[6]演算法舉例作說 明。我們假設有 5 個感測器與 5 個目標物,想要 找出最長的網路存活時間,首先我們先紀錄每個 感測器對於每個目標物的預估監控時間值,如果 無法監控到的就表示為 0,如圖一。 圖一:單位回合內目標物和感測器的預估表。 接下來,我們利用此陣列做最大預估監控時 間 配 對 (Maximum Weighted Perfect Matching)[6],得到配對出的預估監控時間值總 和為最大。再去將感測器開啟到與配對到目標物 的距離,若是有感測器開啟時可以覆蓋到多個目 標時,會將不必要開啟的感測器關閉。 圖一配對好的感測器和目標物如圖二,S1到 S5為感測器,T1到 T5為目標物,實線為配對好 的感測器和目標物,虛線是配對時所用到的輔助 線。 表 III 就是我們 MWPM 演算法。
圖二:圖一的配對結果。
表 III:Maximum Weighted Perfect Matching Algorithm Step 1:去計算每一個感測器可以監控到各個目 標的最大監控時間,若是監控不到就以 0 為代表。 Step 2:若是感測器較多,就把目標物補上虛擬 點否則就將感測器補上虛擬點。 Step 3:將各個感測器監控到各個目標物的預估 回合數存入一個二維矩陣(最大值× 最 大值)之中,以便做最大配對 。
Step 4 : 利 用 Maximum Weighted Perfect Matching[6]來決定哪一個 sensor j 去監 控哪一個 Target i。 Step 5:檢查是否有目標沒被監控到,有的話就 將它和它最近的且電量足夠的感測器 配對。 Step 6:開啟與目標物配對的感測器,若是開啟 時有覆蓋到其他的目標物,將其所覆蓋 的目標物紀錄成已被監控。 Step 7:檢查此回合的開啟感測器電量是否足 夠,若是有感測器電量不足就終止,否 則就是扣除當回合所消耗掉的電量, lifetime++,回 Step 1。 依照二分圖的想法,我們提出了一個考量覆 蓋目標多寡、感測半徑開啟大小和感測器電池剩 餘電量的演算法。因為有預估目標存活時間的長 短,依照目標存活的長短來做排序,從存活時間 最短的目標物優先考量開啟它周圍的感測器。此 演算法稱為 Estimated Lifetime Algorithm (ELT)。
ELT 的演算法最主要是希望能夠去優先監 控到預估存活回合數較小的目標物,並且能夠選 擇開啟哪一個感測器能夠同時監控到最多還沒 被監控的目標物,而且又是比較省電的狀況下。 以下是對此演算法的說明。 在圖三(a)中,S1=(115, 384)、S2=(258, 266)、 S3=(363, 474)、S4=(231, 366)是四個無線感測器的 位置坐標,t1=(215, 468)、t2=(94, 339)、t3=(367, 320) 分別是三個需要被監控的目標點,無線感測器與 目標點的覆蓋關係可以利用二分圖來表示,如圖 三(b);我們利用二分圖就可以清楚的看出感測器 與目標點的覆蓋關係。 依照我們所提出的演算法,先找出每個目標 點 Ti 的 預 估 存 活 回 合 數 (Estimated Lifetime Algorithm,ELTi),ELTi公式化的定義如下: ELTi:在 Ti附近鄰居 R 圓周半徑範圍內所存在的 所有 Sj,理想上只監控到 Ti的情形下, 即 Ti能夠被監控最大的回合數。 依照我們提出的方式可以得到 ELT1=10,所 有 在 t2 附近 感測 器 都只 監控 t2 時可 以得 到 ELT2=25,依此類推可得到 ELT3=5,因此我們可 以知道整個網路存活時間不會超過 5 回合,當我 們排程時就先由 ELT 值最小的 t3開始做排程。 由 t3開始做排程,監控 t3的感測器有 S2、S4, 經 過 我 們 的 ELT 演 算 法 所 計 算 的 效 益 值 Bij(Benefit)可以得到第一回合開啟 S4監控 t3的效 益會比開啟 S2監控 t3的效益好,以此類推我們可 以得到此網路最大存活時間為 5 回合,恰好同等 於我們的預估存活回合數(ELT)。
圖三:t 是目標物集合。S 是感測器集合。(a)感測器覆蓋 狀況。(b)5(a)的二分圖。 為了將目標覆蓋問題公式化,對於在演算法 中會用到的符號作如下的介紹: Bji:效益值,評估當感測器 j 開啟監控到目標物 i 有 多 少 個 目 標 物 可 以 被 監 控 到 。 ji ji j ji C e E B , 當 Sj Ti . Cji:當 Sj監控 Ti時,此範圍內尚未被監控到的 目標物。 eji:當 Sj監控 Ti時,感測器開啟所要消耗的感測 元件電量。 Ti:需要被監控的目標物 S:用來監控目標物可調感測半徑的感測器個數。 j i:目標物編號。i=1~n。 j:感測器編號。j=1~m. R:感測器最大的感測半徑大小。 Ti :在目標物 i 的感測半徑內的感測器。 即 Ti ={ Sj d(Ti, Sj)≦R,where SjS, TiT} where 1in, 1jm, Ti=(xi, yi), Sj=(xj, yj), d(Ti, Sj)= 2 2 ) ( ) (xixj yiyj 。 rji :Ti 和 Sj 的距離,當 Sj 監控 Ti。 rji =d(Ti,Sj)≦R, where Sj
T
i , TiT。 Emax:感測器開啟最大感測半徑所消耗的最大電 量。 Ej:Sj的剩餘電量。 Lifetime:此感測網路存活的回合數。 ELT 的演算法如下表:表 IV:Estimated Lifetime Algorithm Step 1:記錄 Ti 。
Step 2:計算 eji。
Step 3:依序去計算 Ti的 ELTi值 (i=1,2,3,…,n)。
Step 4:將 Ti依照 ELTi值的大小由小排到大。 Step 5:由 Ti開始排程(ELTi數值最小的優先排 程 i=1,2,3,…,n)。 5.1: 找 Ti半徑 R 內所存在的 Sj 5.2: 依照找到 Sj的順序去計算 Cji、Bji 5.3: 找 Bji中最大值紀錄 j,檢查 Si電 量 Ej是否足以開啟監控 Ti。若足 夠則到 Step 5.4 否則跳出到 Step 6。 5.4: 在 Sj半徑 rji內的目標狀態標記成 已監控,將目前電量 Ej扣除監控 所耗的電量 eji,Ej=Ej-eji。 5.5: 如果所有的目標已被監控,則到 Step 5.6,否則回到 Step 5.1。 5.6: 結束一回合 Lifetime++,回到 Step 5.1。 Step 6:Lifetime 為最大存活回合數。
四、行動式感測網路之目標覆蓋問題
我們會對於感測器若是有搭載行動載具,感 測器可以透過移動位置之後,可以開啟較省電的 感測元件來監控目標來達到省電的效果,首先會 先將感測器和目標物的關係透過簡化圖來分析 其中的各種狀況和可能性,一開始將感測器移動完成之後再以第三節的演算法去做排程感測器 的開啟順序,以達到延長整體目標監控感測網路 的存活時間。 在此感測器的假設與上一節相同。每一個感 測器都搭載行動載具和 GPS 可以知道移動的坐 標。移動所需要的電量是每移動單位長度需要 m 單位電量。 首先,假設有一個感測器 S,S 搭載著行動 載具和 GPS 可以進行位置的移動,其移動一單 位長度所需要的電量是 m,每發送一單位的監控 封包所需電量是 e,S 的感測半徑 R 之內有一個 目標物 T,S 和 T 的距離為 d,當 S 往前移動 x 單位距離後,可以使感測器開啟較省電的感測元 件,並且延長 S 對於 T 的監控單位時間。 如下圖 S 和 T 的關係: 圖四:感測器和目標物關係圖 感測元件開啟一次所消耗的電量可以用一 個數學模組來表示,因為和距離的平方正比的關 係,所以可以寫成 e(d-x)2 +C,其中 C 是一個常 數,因為當目標物和感測器接近到某一個距離之 後,會變成至少會消耗掉 C 的基本電量。當感測 器尚未移動時的電量若是 En,移動 x 單位距離 後的電量為 En-mx,感測器剩餘電量可以監控到 目標物 T 幾回合我們可以用 F(x)來代表,而移動 之後的剩餘電量可以監控到目標物 T 的數學模 組如下:
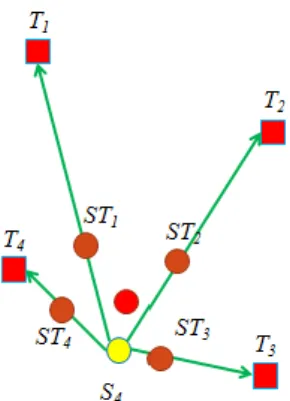
C x d e mx En x F 2 ) ( (1) 當然,很直覺的來說,移動所消耗掉的電量 若是比兩個不同的感測元件之間的電量差大,也 就是說在監控回合數上會就沒有移動感測器的 必要性。在感測器移動前可以推導出移動前的感 測器可以監控到 T 幾回合,如圖四,其式子如下: C ed En x G 2 ) ( (2) 我們能夠將(1)和(2) 其中的幾個參數為已 知,而只有 x 為未知數,則函式 M(x)=F(x)-G(x) 為一個曲線函式,M(X)函式如下: C ed En C x d e mx En x M 2 2 ) ( ) ( (3) 依照(3)式,我們可以求出其極值,也就可以 知道感測器應該向目標物移動多少後才能夠達 到極值,對 x 微分,我們可以導出: ) ( 2 2 C ed eEn m d x (4) 由(4)我們可以發現,感測器的移動和剩餘電 量 En 有極大的關係,當 En 越大時,也就是剩餘 電量越多,可以移動的距離就越大,因為 En 位 於分母,當 En 越大,d 所要減去的數值就越小, 也就是可以移動的距離越遠。 當感測器的感測半徑內有兩個或是多個目 標物的時候,如圖五,我們有多個目標物,感測 器要如果決定往哪一個方向移動,以及該移動多 少的距離,都是會影響到目標覆蓋的生命週期。圖五:一個感測器對多個目標物 若是今天感測器 S 的感測半徑內有四個鄰居 T1、T2、T3和 T4,則感測器 S4可以移動的方向就 會有四個方向,我們會希望能夠監控到這幾個目 標物都能延長監控的時間,所以我們可以利用 4.2 節所計算出來的式子來計算到各個目標物最 有效率的坐標點 ST,如圖六,可以找到四個目 標物的四個點。 圖六:多個目標物與感測器移動推算 分別找到與各個目標物移動後有效率延長 生命週期的點之後,因為我們要考慮到延長這幾 個點的生命週期,因為這幾個點有可能在不同的 方向,所以一個比較直覺的想法,找到這幾個點 的中間點的坐標位置,如圖七,推算感測器移動 到那中心點後,是否能夠延長監控這幾個目標物 的生命週期,若是可以就讓感測器移動到那中心 點上,表 VII 圖七:多個目標物利用 4.2 節式子所推算出來的中心點 表 II: Moving Algorithm
Step 1:計算感測器的感測半徑內的目標物個 數。 Step 2:如果感測器的感測半徑內只有一個目標 物,直接利用 4.1 節(5)的公式代入計算 出感測器是否需要移動,需要移動到 2.1,否則到 Step 4。 2.1:以 4.2 節(5)推導的算式計算出向目標物 移動多少距離。 Step 3:若是感測器的感測半徑內有多個目標 物,利用 4.2 節所推導的式子,計算出 移動到每一個目標物的最有效省電的 坐標,再求這些坐標的中心點,若是感 測器移動到那中心點的堅控時間比在 原位長,則移動到那中心點。 否則不移動,到 Step 4。 Step 4:感測器移動結束,監控的排程利用 LEA 或其他有效率的演算法來決定開啟的 大小和感測器何時開啟。
五、實驗
本論文實驗是以模擬的方式進行實驗,在面 積 500m500m 下,假設每個感測器的初始電量 為 En=500 單位,最大感測範圍 R=150 公尺,開 啟最大感測範圍時的耗電量為 100 單位。我們使用 BCB 作為本論文的模擬器。本實 驗模擬的環境設定所有的感測器與目標點都是 以隨機的方式佈置在待測區域中。 本實驗主要考慮無線感測器的監控耗電對 於整個無線感測網路存活時間的分析,因此在本 實驗只考慮感測器監控時所耗的電量,其他如資 料傳遞、休眠狀態等等所需耗電的情況在本實驗 暫不考慮。每一次實驗都是隨機佈點且保證每一 個情形所有的目標至少會被一個感測器覆蓋,當 有一個目標沒有被感測(監控)到時,就會重新隨 機產生目標位置和感測器位置。本模擬實驗在相 同的實驗模擬設定下模擬 100 次所取出的平均 值。 圖八:感測器的數量對於整個網路存活時間的影響,初始 電量相同的情況下。 首先探討無線感測網路上的感測器數量與 目標 點的 數 量 對 無線 感測 網路 存活 時 間的影 響。在這環境設定下,我們探討有 15 個目標點 的情況,感測器的數量介於 25 到 75 個間,間隔 為 10 個。 由圖八可清楚知道,無線感測網路的存活時 間隨著感測器的增加而有提升,Bound 這條線表 示為利用 ELT 所算出最小被監控到目標物的最 佳存活時間回合數,也就是目標物 ELT 最小值, 五種演算法都會增加無線感測網路的整體存活 時間。其中的 Greedy 演算法經過改進之後可以 有很明顯的提升整體存活時間。 我們再來探討當每個感測器的初始電量不 同的情況,初始電量設為 300~500 單位電量。在 這環境設定下,我們探討有 15 個目標點的情況, 感測器的數量介於 25 到 75 個間,間隔為 10 個。 圖九:感測器的數量對於整個網路存活時間的影響,初始 電量不同的情況下。 由圖九可以的知道,ELT 此演算法很適合在 初始電量不同的情況下,非常靠近 Bound 的 lifetime。之後的幾個實驗在電量不同的情形下, 都可以發現到這一種特性。 接下來,探討無線感測網路上的目標數量對 無線感測網路存活時間的影響。在這環境設定 下,我們探討有 100 個感測器的情況,目標的數 量介於 15 到 65 個間,間隔為 10 個。 由圖十我們可知道,當目標增加的時候,每 一個演算法的存活時間都下降,影響最小的就是 GREEDYI 演算法,因為不管目標的多寡,它都 是開啟最大的感測半徑,所以電量的消耗對它來 說影響不大。我們可以看到 Maximum Weighted Perfect Matching 演算法,它的曲線也不是非常的
穩定,會造成目標物增加時,存活回合數上升的 原因是在當目標物增多的時候,此方法越能夠去 圖十:目標的數量對於整個網路存活時間的影響,初始電 量相同的情況下。 考慮到整體感測器的電量消耗,因為目標物和感 測 器 之 間 的 關 係 (edge) 會 增 多 , Maximum Weighted Perfect Matching 就越容易找到感測器 和目標物之間的配對,達到平衡感測器之間的電 量,所以當會造成這樣的曲線。 當最大感測半徑增大的時候,每一個演算法 的存活時間都有上升的驅勢,會造成這種現象是 因為感測半徑可調整的範圍變大,根據[6]論文裡 所提出的論點可以得知,感測半徑可調整的大小 越有彈性,可以找到更多組集合去監控所有的目 標物,整體的感測網路生命週期也會增長。所以 接下來對於感測半徑不同,感測器 60 個,目標 15 個情況下來做實驗。 圖 十 一 是 感 測器 的初 始電 量 相同 的情 況 下,可以看到當感測半徑越大的時候,整體的網 路存活時間有大幅上升的趨勢,當感測半徑越 大,LEA 和 Maximum Weighted Perfect Matching 的表現會有明顯的提升,其中影響最小的還是 GREEDYI 的演算法,因為它無法調整感測器的 半徑。 圖十一:感測半徑對於整個網路存活時間的影響,初始電 量相同的情況下。 圖十二:感測器增加與感測器移動間的關係。 接下來我們會將感測器移動的方法以 ELT 演算法來當有行動式感測器和沒有行動式感測 器的排程來實驗,我們會在隨機的撒下感測器完 成後,先以第四節所提出的移動方法調整感測器 的位置,等所有感測器位置調整完成以後,再以 ELT 的排程方式來做目標物的監控,一開始先對 感 測器數 量增多來看 與移動 感測器之間 的關 係,如圖十二,在初始電量 1000 單位的情況下, 雖然感測器移動之後的生命週期有比沒移動的 生命週期長,但是感測器的移動是否能幫助延長 整體無線感測網路生命週期與感測器數量沒有 絕對的關係,與感測器的分佈狀況有關,但是感 測器增多對於整體的生命週期是有幫助的。
最後我們會將感測器的初始電量做增加的 動作來觀察生命周期是否和我們所推測的一樣 會增加。當初始電量增加的時候,我們可以得知 感測器可以移動的距離就會變遠。 圖十三:初始電量與感測器移動的關係 由 圖 十 三 我 們 可 以 發 現 當 初 始 電 量 越 多 時,感測器搭載行動載具對於延長整體感測網路 是越有幫助的。
六、結論
本論文主要對無線感測網路上以調整感測 半徑和搭載行動載具來延長目標監控的生命週 期,提出 Estimated Lifetime Algorithm(ELT)演算 法,根據找到的各個 ELT 值我們可以知道整個 網路存活時間不會超過最小的 ELT 值,並以調 整感測半徑來節省能源,以達到無線感測網路存 活時間延長。將行動感測器加入考量後,我們有 分析數學模型,我們提出了一個簡單的判別方式 來提供有搭載行動載具的感測器來移動,在未來 的研究之中,可以將一對多的數學模型來做推 導,並且找出感測器向哪去移動才能夠使整體無 線感測網路的生命週期更為提升,也可以加入不 同的感測元件使得情況會更加的複雜,此問題還 有很多的發展的可能性。參考文獻
[1] A. Dhawan, C.T. Vu, A. Zelikovsky, Y. Li, S. K. Prasad, “Maximum Lifetime of Sensor Networks with Adjustable Sensing Range,” in
Proceedings of the seventh ACIS International Conference on Software Engineering, Artificial
Intelligence, Networking, and
Parallel/Distributed Computing, June 2006, pp.
285-289.
[2] Ali Chamam, Samuel Pierre, “On the Planning of Wireless Sensor Networks: Energy-Efficient Clustering under the Joint Routing and Coverage Constraint,” IEEE Transactions on
Mobile Computing, Vol. 8, No. 8, August 2009,
pp. 1077-1086.
[3] C.-F. Huang and Y.-C. Tseng, “The Coverage Problem in a Wireless Sensor Network,” ACM
Mobile Networks and Applications (MONET),
vol. 10, pp. 519-528, Oct. 2005.
[4] Changxiang Shen, Weifang Cheng, Xiangke Liao, Shaoliang Peng, “Barrier Coverage with Mobile Sensors,” The International Symposium
on Parallel Architectures, Algorithms, and Networks.
[5] Curt Schurgers and Mani B.Srivastava, “Energy Efficient Routing in Wireless Sensor Networks,” IEEE Military Communications
Conference, Oct. 2001, vol. 1, pp. 357–361.
[6] G. Chartrand and Ortrud R. Oellermann,
Applied and Algorithmic Graph Theory.
McGRAW-HILL, 2000.
[7] Gallais Antoine, Carle Jean, Simplot-Ryl David, Stojmenovic Ivan, ”Ensuring Area k-Coverage in Wireless Sensor Networks with Realistic Physical Layers,” 5th IEEE Conference on
[8] Hua Wang, Yi Guo, “A decentralized control
for mobile sensor network effective coverage,”
The Proceedings of the 7th World Congress on Intelligent Control and Automation, June 2008,
pp. 473 - 478.
[9] Ian F. Akyildiz, Weilian Su, Yogesh Sankarasubramaniam, and Erdal Cayirci, “A Survey on Sensor Networks,” IEEE Communications Magazine, 2002, vol. 40, pp.
102–114.
[10] Ian F. Akyildiz, Weilian Su, Yogesh Sankarasubramaniam, and Erdal Cayirci, “Wireless sensor networks: a survey,”
Computer Networks, vol. 38, pp. 393-422,
2002.
[11] Ke Cheng, Prithvirai Dasgupta, “Dynamic Area Coverage using Faulty Multi-Agent Swarms,” IEEE/WIC/ACM International Conference on Intelligent Agent Technology,
November 2007, pp. 17 – 23.
[12] Kuei-Ping Shih, Hung-Chang Chen, and Bo-Jun Liu, “Energy-Efficient Target Coverage in Wireless Heterogeneous Sensor Networks with Multiple Sensing Units,” in Proceedings of
the Second Workshop on Wireless, Ad Hoc, and Sensor Networks, August. 2006, pp. 117-124.
[13] Kuei-Ping Shih, Hung-Chang Chen, and Bo-Jun Liu, “Integrating Target Coverage and Connectivity for Wireless Heterogeneous Sensor Networks with Multiple Sensing Units,”
The 15th IEEE International Conference on Networks, 2007, 19-21 Nov. 2007 pp. 419 –
424.
[14] M. Cardei, M. T. Thai, Y. Li, and W. Wu, “Energy-efficient target coverage in wireless sensor networks,” in IEEE INFOCOM, 2005, vol. 3, pp. 1976-1984.
[15] M. Cardei, J. Wu, M. Lu, and M. O. Pervaiz, “Maximum network lifetime in wireless sensor networks with adjustable sensing ranges,” in
Proceedings of the IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob),
2005, vol. 3, pp. 438-445.
[16] Mohamed Younis, Moustafa Youssef, and Khaled Arisha, “Energy Aware Routing in Cluster-Based Sensor Networks,” 10th IEEE International Symposium on Modeling, Analysis
and Simulation of Computer and
Telecommunications Systems, 2002, pp. 129–136.
[17] Ryo Katsuma, Yoshihiro Murata, Naoki Shibata, Keiichi Yasumoto, Minoru Ito, “Maximizing Lifetime of Wireless Sensor Networks with Mobile Sensor Nodes,” The
Ninth International Conference on Mobile Data Management Workshops, April 2008, pp. 141 –
150.
[18] Yingchi Mao, Xiaofang Li, Lijun Chen, “Energy-Efficient Area Coverage in Heterogeneous Energy Wireless Sensor Networks,” The 4th International Conference
on Wireless Communications, Networking and Mobile Computing, Oct. 2008, pp. 1–4.