國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
空載光達推估樹冠孔隙之研究
Forest Canopy Gap Analysis with Airborne Lidar
研 究 生:吳歷韋
指導教授:史天元
中華民國九十七年一月
空載光達推估樹冠孔隙之研究
Forest Canopy Gap Analysis with Airborne Lidar
研究生:吳歷韋 Student:Li-Wei Wu
指導教授:史天元
Advisor:Dr. Tian-Yuan Shih
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment to the Requirements
For the Degree of Master in
Civil Engineering January 2007
Hsinchu, Taiwan, Republic of China
空載光達推估樹冠孔隙之研究
學生:吳歷韋
指導教授:史天元
國立交通大學土木工程學系
中文摘要
空載光達可有效蒐集點雲三維座標以及回訊強度等數據,是一種快速獲 取空間資訊的有效方法,對於數值地形模型製作及森林資訊萃取,具有極高 之應用價值。本研究嘗試由不同的思維,研擬森林樹冠孔隙之萃取,包括: 以光達點雲過濾地面點為基礎的「地面點法」;利用多重回訊特性為基礎的 「多重回訊法」。將分別探討二種方式對樹冠孔隙萃取之效果,以及影響萃 取成果的原因及分析,並以航空像片建置立體模型,並於立體環境下進行樹 冠孔隙製圖,將立製樹冠孔隙成果與本研究之空載光達萃取樹冠孔隙進行比 對分析。 研究成果顯示「地面點法」因軟體自動過濾之地面點密度過於稀少,使 得萃取之樹冠孔隙成果較差;「多重回訊法」與立製量測成果比對,則有 82% 以上的萃取成果相似。在針對差異部份進一步分析之結果顯示,多重回訊法 成果表現較佳,應可作為樹冠孔隙萃取之用。Forest Canopy Gap Analysis with Airborne Lidar
Student:Li-Wei Wu
Advisor:Dr. Tian-Yuan Shih
Department of Civil Engineering National Chiao Tung University
Abstract
Airborne LiDAR provides an effective means for collecting the three-dimensional coordinate and signal intensity of point clouds. Information gathered is highly useful for extracting forest information and generating digital terrain model. This research studied the extraction of forest canopy gap with both photogrammetric and lidar approaches. The ground point method is based on the ground points obtained from lidar point clouds with filtering. The “ Multi-return method " utilizes the characteristics of multi-return signal. These two methods are compared with the results digitized from stereo models of aerial photography.
It is concluded that “Ground point method" is less effective due to the limited number of ground points after filtering, while “Multi-return method" provided good result. Over 82% of the extracted area from multi-return method is identical to those obtained from photogrammetric approach. The differences between the gaps obtained with different approaches are further analyzed and several observations are documented. It is proposed that the multi-return method with lidar data may provide an alternative to the photogrammetric method.
致謝
研究生的生涯即將在此刻告一段落,這期間有笑也有淚,讓我成長讓我前 進,一切冷暖共同的走過與感受。非常感恩,溫暖的事總是在我的身旁發生。這 論文的完成,非常感謝許多人的關心及幫助,一切的一切讓歷韋今生難忘且珍 惜,這樣的成果與喜悅獻給你(妳)們。 由衷感謝 史老師對歷韋不厭其煩地耐心指導、包容與鼓勵,給予歷韋充分 的獨立思考空間,並適時的給予啟發的意見及建議。研究過程學習培養好奇心、 問問題及思考問題,以及看待學術研究的嚴謹態度。更看到老師待人處事的熱誠 及教學態度上的用心及關心,老師是位嚴師亦似位慈父。老師不僅在研究上認 真,亦在生活上讓歷韋受益良多,衷心地向您說-萬分感謝。同樣感謝曾義星教 授、陳繼藩教授與蔡榮得教授給予論文不同觀點的改正及指教,讓歷韋了解非善 長的地方及更進一步的練習,使論文更加完善。 感謝工研院能環所陳大科主任、劉進金、廖子毅、蕭國鑫、石佳惠、施萍芬、 何心瑜學長姊們在學術及生活上的照顧與關心,特別感謝徐偉城學長對論文、生 活及工作態度各方面給予指正及建議,讓歷韋的信心、毅力更向前進。工研院的 同事們浩智、貞伶、姿蓓、海倫、孟學、慧鵬有你們的生活變得開心又有趣。還 有謝謝給予技術支援的單位人員,航遙測學會的陳慈明大哥、台灣世曦的周宏達 大哥、王淑珍學姊及王佳珮。 謝謝你(妳)們。 校園生活一起打拼的你(妳)們俊毅、清美、雅文、智瑋、子榜、啟訓、玉芳、 逸晴、喭嵐、俊宜、紫猗、煥欽、信翰、富傑、建成、逸如、宏銳、恩銘,謝謝 你(妳)們一起討論功課、一起運動、一起玩樂…許多的一起…,不同的炫麗交集, 產生不平凡的火花與生活,願我們的未來前程似錦。最深切感謝總是默默陪伴在我身後給予最多、最多的精神支持的家人及朋 友,你(妳)們辛苦了。我最愛的爸媽、弟弟妹妹,因為有你(妳)們源源不絕的愛 讓我面對困難更堅強更勇敢,是你(妳)們用行動讓我感受愛的生命力-我愛你(妳) 們。關心我的桂平老師還有她最愛的四個寶貝-謝謝,我們都要走出最屬於自己 的路。朋友們周敏、彥名、易尉、雲賓、筱芳、咨伶、婉芝謝謝(你)妳們一直豐 富我的生活及貼心支持與問候。中央的學長姊、學弟妹及同學們對歷韋的支持與 鼓勵,點點滴滴感念在心。 願將一切的喜悅與(你)妳們一同分享!
目錄
中文摘要... I ABSTRACT... II 致謝...III 目錄... V 表目錄... X 第一章 緒論...1 1.1 研究動機與目的...1 1.2 文獻回顧...2 1.2.1 強度(Intensity)能量建構樹冠孔隙 ...2 1.2.2 樹冠孔隙監測...2 1.2.3 樹冠鬱閉度...2 1.2.4 空載光達多重回訊...3 1.2.5 TerraScan 過濾地面點演算法 ...4 1.3 研究方法...5 1.4 論文架構...5 第二章 立製量測樹冠孔隙...6 2.1 樹冠孔隙量測環境...7 2.2 樹冠孔隙量測方式...7 第三章 空載光達萃取樹冠孔隙...8 3.1 地面點萃取樹冠孔隙...8 3.1.1 網格化及二元化...9 3.1.2 形態學(Morphological)處理 ... 11 3.1.3 萃取樹冠孔隙流程...12 3.2 多重回訊萃取樹冠孔隙...15 3.2.1 網格化、二元化及僅唯一回訊網格...15 3.2.2 回訊網格類別...17 3.2.3 回訊高程差...20 3.2.4 多重回訊萃取樹冠孔隙流程...20 第四章 成果分析...224.1 實驗數據及使用軟體...22 4.1.1 實驗區範圍...22 4.1.2 航照數值立體像對...23 4.1.3 空載光達數據及過濾...23 4.1.4 使用軟體...26 4.2 樹冠孔隙立製量測...26 4.2.1 立製成果展示...26 4.2.2 航空照片產製正射影像...27 4.2.3 立製成果小結...31 4.3 地面點法萃取樹冠孔隙實驗...31 4.3.1 地面點過濾及二元化網格化產出...31 4.3.2 多重回訊過濾及二元化網格產出...32 4.3.3 樹冠孔隙網格成果產出...34 4.3.4 地面點法成果分析...35 4.3.5 地面點法小結...38 4.4 多重回訊萃取樹冠孔隙實驗...39 4.4.1 唯一回訊過濾及二元化網格化產出...39 4.4.2 多重回訊過濾及二元化網格化產出...40 4.4.3 樹冠孔隙網格成果產出...41 4.4.4 網格化套合分析...45 4.4.5 僅唯一回訊過濾分析...54 4.4.6 濾除密樹冠門檻值比較...62 4.4.7 多重回訊法小結...71 第五章 結論與建議...72 參考文獻...73 作者簡歷...75
圖目錄
圖 1-1、空載光達足跡及多重回訊示意圖...3 圖 1-2、雷射穿透樹葉間隙示意圖...4 圖 1-3、地面點過濾門檻示意圖...4 圖 2-1、立製量測樹冠孔隙流程圖...6 圖 3-1、空載光達自動過濾地面點剖面圖...8 圖 3-2、空載光達多重回訊剖面圖...9 圖 3-3、Point2Grid 網格化及計算點數示意圖 ...10 圖 3-4、二元化網格示意圖...10 圖 3-5、指紋影像形態學處理示意圖... 11 圖 3-6、地面點萃取樹冠孔隙流程圖...12 圖 3-7、僅地面點網格示意圖...14 圖 3-8、空載光達多重回訊剖面圖...15 圖 3-9、僅唯一回訊網格示意圖...16 圖 3-10、回訊網格類別樹狀圖...17 圖 3-11、空載光達樹冠及草叢回訊剖面圖 ...18 圖 3-12、空載光達密樹冠回訊剖面圖...18 圖 3-13、空載光達密草叢回訊剖面圖...19 圖 3-14、空載光達裸露地回訊剖面圖...19 圖 4-1、實驗區位置示意圖...22 圖 4-2、航照相對位置示意圖...23 圖 4-3、地面點自動過濾之點雲分佈圖...25 圖 4-4、多重回訊點過濾之點雲分佈圖...25 圖 4-5、整體立製區域圖...26 圖 4-6、立製成果與正射影像套合圖...27 圖 4-7、實驗區Ⅰ之立製樹冠孔隙成果圖...28 圖 4-8、實驗區Ⅱ之立製樹冠孔隙成果圖...30 圖 4-9、自動過濾地面點分佈圖...31 圖 4-10、地面點網格分佈圖...32 圖 4-11、多重回訊分佈圖 ...33 圖 4-12、多重回訊網格分佈圖...33 圖 4-13、僅地面點網格分佈圖...34圖 4-14、僅地面點經形態學視窗 5×5 處理之網格分佈圖...35 圖 4-15、僅地面點經形態學視窗 3×3 處理之網格分佈圖...35 圖 4-16、形態學 3×3 處理與僅地面點網格成果套疊網格分佈圖...36 圖 4-17、空載光達自動分類地面點剖面圖...38 圖 4-18、唯一回訊分佈圖...39 圖 4-19、唯一回訊網格分佈圖...40 圖 4-20、第一、第二及最後回訊分佈圖...40 圖 4-21、多重回訊網格分佈圖...41 圖 4-22、僅唯一回訊網格分佈圖...41 圖 4-23、濾除密樹冠之僅唯一回訊網格分佈圖...42 圖 4-24、多重回訊萃取之樹冠孔隙網格分佈圖...43 圖 4-25、樹冠孔隙合併分佈圖...43 圖 4-26、形態學 5×5 處理之網格分佈圖...44 圖 4-27、立製與多重回訊法萃取之樹冠孔隙套合圖...44 圖 4-28、立製與多重回訊法套合異同分色圖...45 圖 4-29、立製與多重回訊法之孔隙套合及 6 剖線圖...46 圖 4-30、剖線 1 套合分析圖...47 圖 4-31、剖線 2 套合分析圖...48 圖 4-32、剖線 3 套合分析圖...49 圖 4-33、剖線 4 套合分析圖...50 圖 4-34、剖線 5 套合分析圖...51 圖 4-35、剖線 6 套合分析圖...52 圖 4-36、最高唯一回訊與最低最後回訊之高程差圖...54 圖 4-37、密樹冠回訊網格濾除前、後及分析剖線圖...55 圖 4-38、剖線 1 濾除密樹冠套合分析圖...56 圖 4-39、剖線 2 濾除密樹冠套合分析圖...57 圖 4-40、剖線 3 濾除密樹冠套合分析圖...58 圖 4-41、剖線 4 濾除密樹冠套合分析圖...59 圖 4-42、剖線 5 濾除密樹冠套合分析圖...60 圖 4-43、唯一回訊與最後回訊內插示意圖...61 圖 4-44、門檻值 7 濾除密樹冠回訊網格圖...62
圖 4-46、門檻值 3 濾除密樹冠回訊網格圖...63 圖 4-47、濾除門檻之網格分佈圖...64 圖 4-48、剖線 1 濾除門檻分析圖...65 圖 4-49、剖線 2 濾除門檻分析圖...66 圖 4-50、剖線 3 濾除門檻分析圖...67 圖 4-51、剖線 4 濾除門檻分析圖...68 圖 4-52、剖線 5 濾除門檻分析圖...69 圖 4-53、剖線 6 濾除門檻分析圖...70
表目錄
表 4-1、空載光達掃描資料表... 24 表 4-2、空載光達點雲過濾資料表... 24 表 4-3、立製成果樹冠及孔隙面積表... 27 表 4-4、僅地面點與立製成果差量表... 37 表 4-5、立製成果及地面點法各階段萃取之數量表... 37 表 4-6、立製與多重回訊法異同分色表... 45 表 4-7、立製與多重回訊法異同面積量表... 46 表 4-8、立製與多重回訊法異同百分比表... 46 表 4-9、僅唯一回訊濾除密樹冠回訊網格前、後數量表... 54 表 4-10、各門檻剩餘僅唯一回訊網格數量及差異量表... 63第一章 緒論
1.1 研究動機與目的
空載光達(Airborne LiDAR)結合全球定位系統(Global Position System, GPS)、慣性導航系統(Inertial Navigation, INS)及雷射測距三項技術,可獲取 大量且高密度的地面多重回訊點雲(Point Cloud)資料(史天元等,2005)。資 料內容含有豐富的空間資訊,包含地物及地面點,適合應用於地形模型製 作,如數值覆蓋模型(Digital Surface Model, DSM)及數值高程模型(Digital Elevation Model, DEM)。
空載光達資訊不僅用於數值地形模型製作,資料中具“多層次"多重回 訊特性及訊號強度可輔助地物判別,亦可應用於森林相關研究,如單木萃取 (Morsdorf et al.,2003)、森林材積推估(Chen et al.,2007)、森林結構分析(Lim et al.,2003)、推估森林指標(陳大科等,2007)、建構樹冠孔隙(Hopkinson, 2007) 及 輔 助 森 林 相 關 監 測 等 。 森 林 常 用 指 標 之 一 樹 冠 鬱 閉 度 (crown closure),亦稱為樹冠密度、樹冠覆蓋度或林冠密度,用以表示樹林面積覆 蓋程度,可用來評價育木作業及森林之生態(焦國模,1999)。此類指標之量 測,傳統方式可由進行地面調查或是由航空攝影測量技術判釋,但皆屬勞力 密集之量測方式。本研究不直接萃取樹冠,而採取反向萃取方式,使用空載 光達資訊萃取非樹冠之涵蓋區域,即樹冠孔隙(Canopy gap)。樹冠孔隙的萃 取可了解樹冠覆蓋密佈程度,輔助森林健康生長狀態參考,協助樹冠變動生 態過程之解釋(謝漢欽等,2006),亦可做為前述樹冠鬱閉度之相關參考指 標,對於森林研究提供應用。 本研究引用不同角度的思考觀念,探討以不同光達資訊特性為主軸,進 而擬定方式萃取森林樹冠孔隙,掌握其個別的特色表現,嘗試各方法萃取樹 冠孔隙的影響因子及比較其優缺點,找到最適切的萃取方法,同時亦比較數 值立體模型量測與空載光達萃取樹冠孔隙不同之處,希望能提出較自動化的 空載光達樹冠孔隙萃取方式,以取代傳統之人工影像立體模型判釋。
1.2 文獻回顧
1.2.1 強度(Intensity)能量建構樹冠孔隙
Hopkinson(2007)以修改空載光達垂直訊號的能量分佈建構樹冠孔隙區 塊,主要是針對混合林區域進行試驗,使用一般商業用途小足跡的空載光達 地形分離訊號。研究方法是依據 Beer-Lambert 法修改,Hopkinson 認為樹冠 孔隙區塊比率 P (ground return power / total return power)與數位半球攝影 (Digital Hemispherical Photography,DHP)兩者是相似的,因而其試驗結果與 一般常引用的地面-全體反射率(ground-to-total returns ratio)進行比對。使用 的參考樹冠孔隙數據是在 2006 年的 4 月到 10 月期間收集,5 組數據是使用 相同的傳感器和調查形態,分別不同的時刻場地,以標準的 DHP 程序及一 致的乾燥的條件下收集。能量分佈比率是適合混合林環境研究的,光達以強 度為基楚的能量的分佈比率與 DHP 孔隙區塊的相關性 r2 =0.92 ,與一般使 用的地面-全部反射率方法所得之相關性 r2 =0.86 更為高度相關。 1.2.2 樹冠孔隙監測 謝漢欽等(2006)使用 1998 年及 2002 年兩期蓮華池試驗區數值航空照 片,以數值立體測繪方式,求得樹冠孔隙空間分佈主題層。以地景空間分析 方法,分析樹冠 7 個孔隙地景結構指標。使用多元統計聚集分析及判別分析 方法歸類樹冠孔隙。以細胞自動機馬可夫鏈模式分析兩期影像的孔隙轉移機 率,預測孔隙發展趨勢及趨於穩定的時間預測。應用多尺度空隙度分析 (lacunarity analysis)方法,分析兩期樹冠孔隙不同取樣尺度的差異,並找出 合適分析尺度的大小。結合數值地形因子及空間梯度及異向性分析孔隙變化 的空間相關性。所得結果可協助林冠變動生態過程之解釋。 1.2.3 樹冠鬱閉度 樹冠鬱閉度(Crown closure)為森林分析常用指標之一,亦為林分材積表 重要參數。樹冠鬱閉度也叫樹冠密度(Crown density),樹冠覆蓋度(Crown cover)或林冠密度(Canopy Density)。實際三者明確定義有些不同以下一一說 明(焦國模,1999):
樹冠鬱閉度:林分材積表中之一參數,故其著眼點為與林木材積有關之 樹冠所佔林之面積。 樹冠密度:用於評價育林作業及森林之生態狀況,如樹冠對光線之穿透 性、反射性、降水之穿透性、阻擋雪之能力等,因而其所指 者應為一切樹木之樹冠所佔林地面積之百分數,可以各樹株 之樹冠推知之。 林冠密度:乃不計其重疊時之樹冠密度,亦即空中照片上所見之樹冠所 佔林地面積之百分數。 但實則三者具有相應關係,亦可做為樹冠鬱閉度指標之參考應用,本研 究萃取目標為樹冠孔隙(Canopy gap),與前述林冠密度相對應。 1.2.4 空載光達多重回訊 空載光達發射雷射光束獲取資訊,發散形成圓錐狀,接觸地表形成直徑 約數十公分到數公尺的圓形光照區域,此區域稱為足跡(footprint)(Baltsavias, 1999)。當地表接觸物未能完全阻擋光達雷射光束足跡面積範圍,未被阻擋 的雷射光會繼續往下傳送直到抵達另一被測物表面如圖 1-1。 圖 1- 1、空載光達足跡及多重回訊示意圖(陳大科等,2007) 空載光達穿透方式如圖 1-2 所示,雷射光束接觸第一受測物,反射成為 第一回訊(First of many echoes);未被第一受測物完全阻擋之雷射繼續向下傳 送,接觸第二受測物,反射成為第二回訊(Intermediate of many echoes);第 二受測物仍未完全阻擋所剩的雷射光仍會繼續向下傳而形成多次回訊。反 之,雷射光束一次完全由受測物完全阻擋,則形成唯一回訊(Only echo);單
一雷射光束可能產生一次或多次的反射回訊(Echo),每一反射回訊都包含三 維資訊。運用此特性,可探討空載光達穿透至地面之研究(黃清美,2007)。 應用於森林,可獲得高程方向不同層次之變化狀態,亦可做為林分材積估算 參考(張瑞文,2007)。 圖 1- 2、雷射穿透樹葉間隙示意圖(Kristian, 2002) 1.2.5 TerraScan 過濾地面點演算法
TerraScan (Terrasolid, 2004a)具有地面點過濾處理功能,其演算法主要根 據 Axelsson(1999)提出之曲線近似法,主要原理為:由自訂格網大小(Max building size)決定運作時以該尺寸大小為分割網格,並以網格內最低點為初 始種子點(seed),組成初始 TIN(Triangulation of Irregular Network),逐一加入 符合門檻值之迭代點,當符合之迭代點搜尋完成,迭代點再次組成新 TIN 做為下次搜尋迭代點之參考面,重複計算直到無低於門檻值之迭代點而終 止。迭代門檻為限制點雲到 TIN 平面的角度及距離(圖 1-3),其中 Terrain angle 為迭代時所接受的 TIN 三角形平面最陡角度;Iteration angle 為可接受之迭 代點與 TIN 三角形平面間最大角度;Iteration distance 為可接受之迭代點與 TIN 三角形平面間最大距離,可用來限制 Iteration angle(何心瑜,2006)。
1.3 研究方法
本研究嘗試利用三種不同方法獲得森林之樹冠孔隙,包含:(1)航照數 值立體模型,由數值航空立體像對,經建置模型所需內方位、共軛點及給定 控制點,實際求得外方位參數後組成立體模型,再於數值立體三維模式下進 行樹冠孔隙判釋立製,立製成果與正射影像套合作為比對分析之用。(2)空 載光達過濾之地面點萃取樹冠孔隙,由空載光達穿透孔隙到達地面特性,運 用過濾所得地面點做為樹冠孔隙萃取基礎。(3)空載光達多重回訊特性萃取 樹冠孔隙,以光達穿透林木產生多重回訊特性,做為萃取樹冠孔隙基礎,反 取非多重回訊涵蓋區域,達到萃取樹冠孔隙目的。最後並針對三種萃取樹冠 孔隙方法進行實驗,探討空載光達萃取樹冠孔隙影響因子、可行性及其優缺 點。1.4 論文架構
論文架構分為五章,分述如下: 第一章「緒論」:說明研究動機與目的、文獻回顧、研究方法及論文架 構。 第二章 「立製量測樹冠孔隙」:說明立體模型建立、立體製圖環境及進 行樹冠孔隙量測方式。 第三章「空載光達萃取樹冠孔隙」:以空載光達資訊萃取樹冠孔隙,說 明地面點法與多重回訊法之萃取流程。 第四章「成果分析」:說明試驗資料及分析比較各試驗成果。 第五章「結論與建議」:研究成果結論與建議。第二章 立製量測樹冠孔隙
現行大面積快速獲取樹冠孔隙方式,主要以衛星或航照影像進行分類或 判釋,本研究考量空載光達之尺度,因此使用解析度相當的航空影像,取得 內方位參數及地面控制點,由數值影像建構數值立體模型,並於立體環境下 進行樹冠孔隙量測,作為研究成果之參考比對。
立體模型建置及立體環境下之製圖(立製),使用 SOCET SET 5.3(BAE Systems)進行作業流程如圖 2-1 所示。主要分為兩部分:(1)外方位參數之求 解:為組成數值立體模型,輸入多張立體像對且完成內方位之建立,並於立 體像對上點選多處的對應共軛像點,然後在影像上搜尋點取對應的已知地面 控制點,以光束法計算各影像之外方位參數。(2)立體量測數化:經由外方 位參數輸入組成數值立體模型,並於立體模型介面下進行樹冠孔隙量測工 作。
2.1 樹冠孔隙量測環境
樹冠孔隙量測環境是解算外方位參數後,於立體模型環境進行人工判讀 量測。量測時以原始數值影像解析度對應螢幕解析度(即倍率 1X)作業,分 別以手輪及腳盤控制浮測標於 E, N, h 三方向之移動,圈選繪製樹冠孔隙多 邊形,量測過程則直接連結 MicroStation 8.1(Bentley Systems)製圖,以向量 形式紀錄樹冠孔隙。
2.2 樹冠孔隙量測方式
在樹冠孔隙量測過程中,為確保判定之一致性及減少不必要之量測錯 誤,因此量測過程以取得正確樹冠孔隙為基礎,於相同的環境條件下進行孔 隙判定量測,依據以下準則進行立製作業: (1)以未壓縮之影像解析度,對應螢幕解析度(即倍率 1X)進行立製作業。 (2)搜尋樹冠孔隙採取由左至右、上至下方式逐一搜尋。 (3)採取空地處浮測標貼地,再往四周量測孔隙邊界。 (4)綜合影像色調與高程變化推估樹冠孔隙邊界。 (5)陰影遮蔽區,由色階變化判斷樹冠孔隙。 (6)陰影及色階無法明確辨認則無法進行量測。 (7)最小判釋孔隙為 5m x 5m。 (8)樹冠孔隙中大於 5m x 5m 樹群(Island),另行標色量測。 (9)需長時間方可圈繪完成之樹冠孔隙,採取分段圈繪,以免視覺疲勞。第三章 空載光達萃取樹冠孔隙
3.1 地面點萃取樹冠孔隙
空載光達掃瞄樹林時,其訊號於樹冠孔隙區可獲得地面點回訊,因此可 以使用空載光達過濾之地面點為萃取樹冠孔隙之依據。而從實際的點雲數據 進行觀察,圖 3-1 為空載光達點雲自動過濾地面點剖面圖,其中點雲分佈較 突起之高處為樹冠,無樹冠點雲之處則為樹冠孔隙,而過濾後之地面點(橘 色)與樹冠孔隙有相當之相應關係。 圖 3- 1、空載光達自動過濾地面點剖面圖 本研究另考量光達穿透樹冠產生的多重回訊特性,如圖 3-1 與圖 3-2 具 相同空間點位分佈,但是以不同形式展現,其中樹冠點之分佈會有第一、第 二回訊點的產生,因而包含第一、第二回訊點之位置是不可被萃取為樹冠孔 隙範圍,需將此類點位予以濾除,另因最後回訊為地面點過濾來源,所以未 引入最後回訊做為濾除條件。樹冠孔隙
樹冠點雲
圖 3- 2、空載光達多重回訊剖面圖 3.1.1 網格化及二元化 在樹冠孔隙萃取過程中,對於地面點之過濾以原始三維離散點之方式處 理,而孔隙之判定則採取網格化方式進行。網格化使用 Point2Grid (Crosby, 2007),過濾後之點雲以 Point2Grid 計算單位網格包含點數,以如圖 3-3 為 例:以 Point2Grid 計算網格化之點數,將網格大小設為 1m,針對單一網格 計算點數時,先以網格中心為圓心,計算半徑 0.707m(網格對角線一半)之搜 尋圓內所含點數,即為網格之點數。 計算出各網格的點數後,再由 ArcGIS 9.1(ESRI)二元化處理,轉化為二 元化網格形態,即得屬性網格與非屬性網格,而網格之屬性形態則由所輸入 點雲屬性定義,如圖 3-4 所示。
樹冠點雲
樹冠孔隙
圖 3- 3、Point2Grid 網格化及計算點數示意圖
3.1.2 形態學(Morphological)處理 一般認為樹冠孔隙為聚集形態並非過於零散的分佈,因此可採用形態學 方式處理,對過於零散孔隙進行濾除,或間距相當接近之孔隙加以合併,以 提高與實際孔隙對應的合理性。此外,以航照進行立體量測之樹冠孔隙成 果,多呈現聚集之型態,因此在與空載光達訊號萃取之成果比較時,使用形 態學處理之一致性較佳。
形態學處理使用 ERDAS IMAGINE 9.1(Leica),首先以斷開(Opening)處 理再以閉合(Closing)處理。斷開主要使物件輪廓平滑,濾除零散雜點;閉合 也是使物件輪廓平滑,但把細窄的中斷部份聚合起來,填補細長缺口及小洞 口。以圖 3-5 之指紋影像為例,在形態學處理時,圖 3-5(a)為被處理之雜訊 指紋影像,圖 3-5(b)為結構元素(structuring element),經斷開處理濾除細小 雜訊後為圖 3-5(c),而斷開後做閉合聚合鄰近指紋則為圖 3-5(d)(Gonzalez, 2002)、(繆紹綱,2005)。 本研究以相同方式處理,先以斷開處理除去細小孔隙,保留大部份孔隙 輪廓,再以閉合處理聚合連接相近之孔隙,而選用之結構元素視窗大小為 5x5,另由於整體處理無特定方向之考量,因此結構元素中之值皆為 1。 (a)雜訊指紋影像 (b) 結構元素 (c)斷開處理 (d)閉合處理 圖 3- 5、指紋影像形態學處理示意圖
3.1.3 萃取樹冠孔隙流程 點雲經由 TerraScan 軟體自動過濾地面點後,地面點萃取樹冠孔隙流程 可分為三大部份,如圖 3-6 所示。其中左方粉紅色部份為地面點二元化網格 作業,右方粉紅色部份為多重回訊二元化網格作業,而下方藍色部分則為合 併萃取處理作業。
地面點二元化網格
多重回訊二元
化網格
圖 3- 6、地面點萃取樹冠孔隙流程圖地面點二元化網格作業,主要是先輸入自動過濾後之地面點,經由網格 化及二元化的處理,由於輸入之屬性為地面點,因此稱為地面點網格及非地 面點網格。而多重回訊二元化網格作業,輸入部分則為點雲過濾後的第一、 二回訊點,同樣經網格化及二元化的處理,在此稱為多重回訊網格與非多重 回訊網格。 根據上述定義,在相同平面位置之網格上,地面點及多重回訊屬性組合 共有四種類型的組合,分別為:(1)地面點-多重回訊、(2)地面點-非多重回訊、 (3)非地面點-多重回訊及(4)非地面點-非多重回訊。其中本研究所萃取樹冠孔 隙之類型為(2)地面點-非多重回訊之組合,此類型網格中代表僅包含樹冠孔 隙(地面點)資訊及未含樹冠(多重回訊)資訊,稱此組合網格為”僅地面點網 格"。 僅地面點網格萃取方式如圖 3-7 所示,其中圖 3-7(a)為自動過濾地面點 後之點雲,圖 3-7(b)為地面點搜尋後之成果,經二元化之地面點與非地面點 網格成果為圖 3-7(c);而圖 3-7(d)為第一、二回訊點之搜尋,經二元化之網 格成果之多重回訊及非多重回訊網格為圖 3-7(e),最後再合併地面點與非多 重回訊網格,萃取僅地面點網格成果,如圖 3-7(f)所示。僅地面點網格再經 形態學去除零碎孔隙雜訊(斷開)及聚合臨近區塊(閉合)處理,可得樹冠孔隙 成果。
(c)地面點/非地面點網格
(b)地面點搜 (d)多重回訊點搜尋
(d)多重/非多重回訊網格
(f)僅地面點網格 (a)空載光達點雲
3.2 多重回訊萃取樹冠孔隙
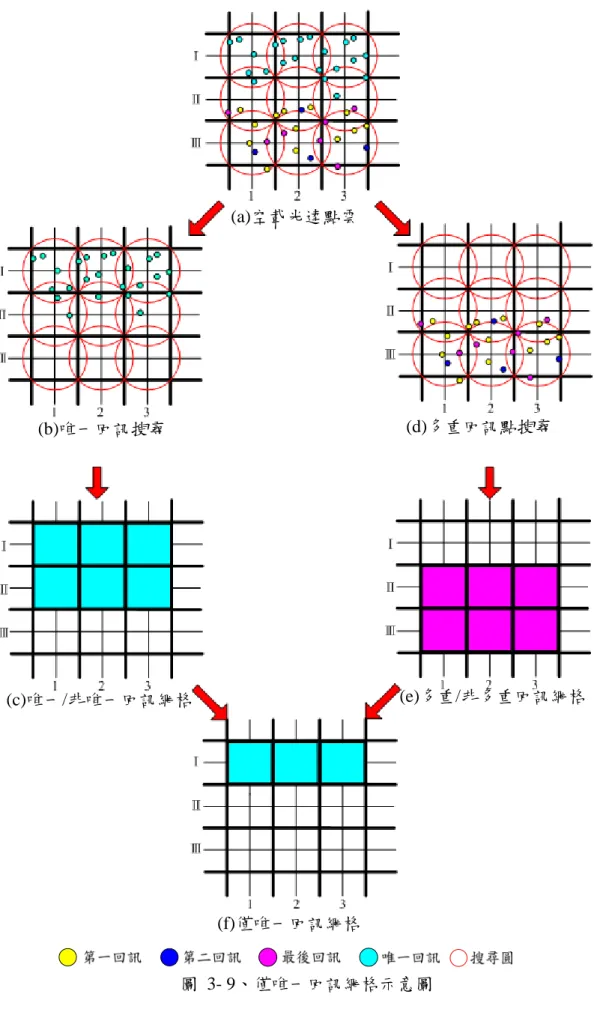
3.1 節所述以地面點萃取樹冠孔隙之方式,雖然具有自動化之優點,但 容易受到自動化過濾地面點正確性之影響,而空載光達訊號在掃瞄樹林時, 因樹冠高低參差產生穿透的多重回訊效應明顯,因此應可作為樹冠孔隙萃取 之基礎。圖 3-8 為空載光達多重回訊之剖面圖,點雲分佈突起高處為樹冠點 雲分佈,無樹冠點雲之處則為樹冠孔隙,其中樹冠孔隙區域與唯一回訊點反 應具有相當高的對應關係,而大部份樹冠區域則與呈現多重回訊反應,因此 可嘗試利用此特性進行樹冠孔隙之萃取。 圖 3- 8、空載光達多重回訊剖面圖 3.2.1 網格化、二元化及僅唯一回訊網格 多重回訊法同樣使用 3.1.1 節中地面點法的網格化及二元化處理方法, 如圖 3-9 所示,其中圖 3-9(a)為唯一回訊點及多重回訊點屬性圖,經網格化 及二元化處理可得圖 3-9(c)之唯一回訊與非唯一回訊網格,以及圖 3-9(e)之 多重回訊與非多重回訊網格,再由唯一回訊網格中扣除多重回訊網格,得到 圖 3-9(f)僅包含唯一回訊點的網格成果,稱為”僅唯一回訊網格”。樹冠孔隙
樹冠點雲
圖 3- 9、僅唯一回訊網格示意圖
(b)唯一回訊搜尋 (d)多重回訊點搜尋
(c)唯一/非唯一回訊網格 (e)多重/非多重回訊網格
(f)僅唯一回訊網格 (a)空載光達點雲
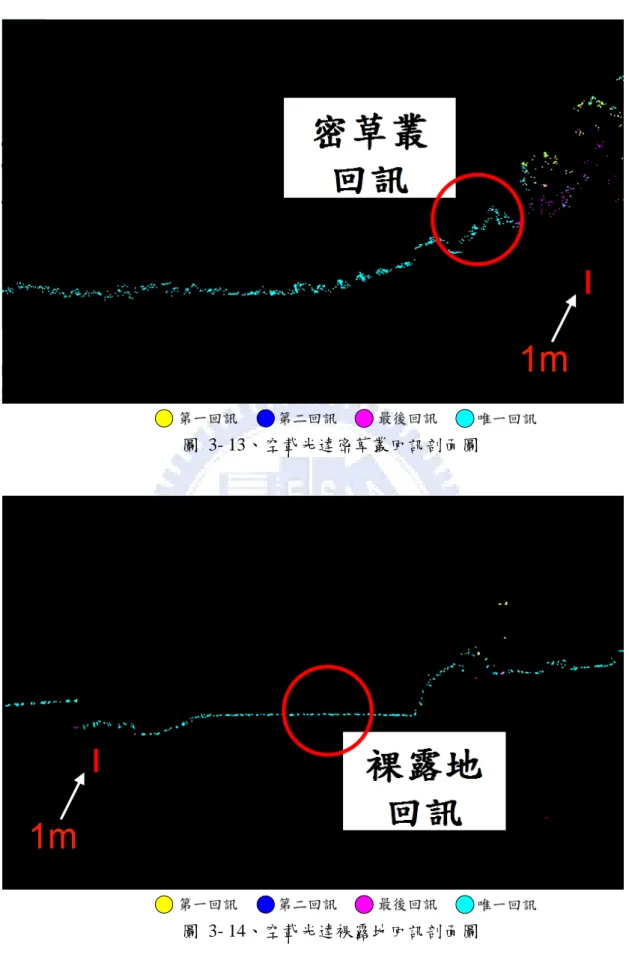
3.2.2 回訊網格類別 多重回訊法以空間解析度 1m 為基本網格大小,依據每一網格所包含回 訊點之屬性可將網格進行分類,如圖 3-10 即為回訊網格類別樹狀圖,主要 分為:多重回訊網格、僅唯一回訊網格及無回訊網格三大類別。 若單一網格包含第一、二或最後回訊之其中一種,則皆屬於多重回訊網 格,再依點雲分佈之高程差,細分為樹冠及草叢回訊網格。以圖 3-11 之點 雲多重回訊剖面圖為例,點雲在樹冠區域具有多重回訊,且高點與低點之高 程差(樹高)較大;而草叢回訊雖亦有多重回訊,但其高點與低點之高程差較 小。 若單一網格僅包含唯一回訊,則可依點雲分佈形態再細分為:密樹冠、 密草叢及裸露地三種回訊網格。其中密樹冠回訊網格之特徵為:唯一回訊分 佈樹冠頂層,僅有零星最後回訊落於地形面,並與樹冠頂有明顯高差,如圖 3-12 所示;密草叢回訊網格之特徵為:唯一回訊分佈於頂層,但無零星最後 回訊落於地形面,且僅有較小之高程變化,如圖 3-13 所示;而裸露地回訊 網格特徵則為:僅由唯一回訊組成,並無其他多重回訊,如圖 3-14 所示。 根據上述之網格分類法則,樹冠孔隙應屬於:草叢、密草叢及裸露地等 三種回訊網格類別,即圖 3-10 樹狀圖中標示之類別。 圖 3- 10、回訊網格類別樹狀圖
圖 3- 11、空載光達樹冠及草叢回訊剖面圖
圖 3- 13、空載光達密草叢回訊剖面圖
3.2.3 回訊高程差 在過濾點雲唯一回訊及最後回訊時,分別以回訊點之高程值進行網格 化。其中唯一回訊是取網格中最高點之高程值,而最後回訊則是取網格中最 低點之高程值,若網格中無上述回訊數據則以鄰近之點雲高程內插而得,最 後得到唯一回訊高程表面與回訊高程表面後,再分別以 5×5 視窗進行平滑化 (smoothing)處理,使相鄰網格間高程關係較為連續。 將前述兩個表面相減而得到回訊高程差,即以唯一回訊高程減最後回訊 高程,如圖 3-15 中藍色部分為最高唯一回訊高程表面,紫色部分為最低最 後回訊表面。以單一網格觀點而言,回訊高程差可代表網格範圍中物件高度 量,因而回訊高程差可做為萃取孔隙過程的參考依據。 圖 3- 15、回訊高程差示意圖 3.2.4 多重回訊萃取樹冠孔隙流程 以多重回訊法萃取樹冠孔隙時,先由 TerraScan 進行點雲之回訊過濾, 整個處理流程主要分為 5 大部份,其作業流程如圖 3-16 所示。其中左、右 粉紅部份分別為唯一回訊二元化網格及多重回訊二元化網格之作業流程,主
回訊高程差流程,做為萃取樹冠孔隙之主要依據;而左下方紫色部分之目的 為濾除密樹冠網格,根據高程差門檻值△ha將密樹冠回訊網格濾除後,所剩 網格即為密草叢及裸露地回訊網格;而右下方紫色部份則可將多重回訊網格 中包含草叢回訊之網格,以高程差門檻值△hb進行判定,將草叢回訊網格取 回後視為樹冠孔隙;最後藍色部份之流程,則是樹冠孔隙的產出,將萃取的 樹冠孔隙予以合併,再使用形態學方式,進行零碎孔隙雜訊(斷開)及聚合臨 近區塊(閉合)處理,產生最終之樹冠孔隙成果。 圖 3- 16、多重回訊萃取樹冠孔隙流程圖
第四章 成果分析
4.1 實驗數據及使用軟體
4.1.1 實驗區範圍 本研究之實驗區域位於台灣嘉義縣阿里山,共選取兩個各 1 平方公里之 實驗區,分別為實驗區Ⅰ及實驗區Ⅱ,實驗區內主要的樹種為:柳杉、赤楊 及紅檜,皆是成熟之人工林;而實驗區之平均地面高度約為 2000 公尺,地 形多為山地,但也包含溪谷及坡度較小的裸露地,實驗區之位置如圖 4-1 所 示。 圖 4- 1、實驗區位置示意圖實驗區Ⅰ
實驗區Ⅱ
4.1.2 航照數值立體像對 本研究取得之航照為農航所 2006 年 1 月 14 日所拍攝,相機型號為 Zeiss RMKTOP15,像機焦距 152.818mm,飛航高度約 5300m,相片解析度 14μm。 航照共有 9 幅,分別位於 3 條航帶,由南至北、西至東,相片編號分別為: 94R075_141 、 94R075_142 、 94R075_143 、 94R083_121 、 94R083_122 、 94R083_123、95R002_195、95R002_196、95R002_197,各航照之相對位置 如圖 4-2 所示。 其中於航照數值立體模型製作及樹冠孔隙量測時,使用 94R075_141 與 94R075_142(紅框)之立體像對,另外為便於成果之比對套疊,使用 93 年內 政部「高精度高解析度計畫」五千分之一圖幅編號 95202091 及 95202092 之 5 公尺 DEM,產製正射影像。 圖 4- 2、航照相對位置示意圖 4.1.3 空載光達數據及過濾 本研究使用之空載光達資料,取自行政院農委會委託工業技術研究能源 與環境研究所執行「先進航遙測應用技術開發計畫」,使用 Leica 公司出產 之 ALS 50 型空載光達掃描系統(Leica,2003),載具為群鷹翔公司所屬之 BN2 定翼飛機,相關掃描資料如表 4-1 所示,研究區內總共獲取 9 條東西向之光 達點雲資料,航帶重疊率約 80%,平均點雲密度達每平方公尺 5 點以上。
表 4- 1、空載光達掃描資料表 掃描日期 2007 年 3 月 19、20 日 航高 約 3100m 平均地面高 約 2000m 航速 約 205km/hr 雷射掃描頻率 40900Hz 掃描視角 37° 雷射掃描鏡旋轉頻率 17Hz 掃描 IFOV 0.33milliradian Footprint 大小 約 0.36m 以 TerraScan 進行地面點自動過濾及多重回訊過濾之成果如表 4-2 所 示,其中全部點為粉紅色;自動地面點過濾之成果為黃色;多重回訊過濾成 果為紫色。各項成果另分別列出實驗區Ⅰ、Ⅱ之點數及點密度。實驗區地面 點自動過濾與多重回訊過濾後之點雲分佈狀態,分別如圖 4-3 及圖 4-4 所示。 表 4- 2、空載光達點雲過濾資料表 實驗區 Ⅰ Ⅱ 項目 點數 密度(points/m2 ) 點數 密度(points/m2 ) 全部點 5,751,029 5.751 6,610,538 6.611 預設 1,273,993 1.386 1,912,508 2.061 唯一及最後回訊 4,256,561 4.257 4,420,379 4.420 過濾地面點 220,475 0.275 277,647 0.322 第一回訊 1,131,039 1.232 1,573,742 1.697 第二回訊 142,954 0.251 338,766 0.434 最後回訊 1,125,606 1.190 1,567,669 1.654 唯一回訊 3,351,429 3.351 3,130,357 3.130 圖幅範圍 左上角點(226000,2601000)m 右下角點(227000,2600000)m 左上角點(227000,2601000)m 右下角點(228000,2600000)m
圖 4- 3、地面點自動過濾之點雲分佈圖
圖 4- 4、多重回訊點過濾之點雲分佈圖
實驗區Ⅰ
實驗區Ⅱ
4.1.4 使用軟體
本研究使用 SOCET SET 進行航照之幾何糾正及正射影像產製,立製作 業時則連結 MicroStation 進行繪圖。空載光達資料處理使用 MicroStation 作 業環境下附加 TerraScan 進行空載光達資料處理、過濾及展示工作;GEON Points2Grid Utility 進行點雲之網格化及點密度計算;ArcGIS 則進行網格計 算萃取樹冠孔隙;ERDAS IMAGINE 則進行形態學處理。
4.2 樹冠孔隙立製量測
4.2.1 立製成果展示 航照數值立製使用像片為 94R075_141 及 94R075_142,以 TWD97 為參 考坐標,高程使用正高系統。整體立製區域如圖 4-5 所示,其中:黃色方格 為邊長 1km 之參考框線,綠色線條為立製所圈繪的樹冠孔隙區域,紅色線 條為另行標繪之非孔隙部份(Island),以便與周圍樹冠孔隙區隔。立製區域為 左上角點(223000,2601000)右下角點(226000,2600000)之粉紅色範圍,即實驗 區Ⅰ及實驗區Ⅱ。4.2.2 航空照片產製正射影像 正射影像由 SOCET SET 產製,使用航空照片 94R075_141、94R083_121 及其外方位參數,各別套用五千分之一圖幅編號 95202091 及 95202092 DEM 產製。切取立製範圍之正射影像與立製成果套疊如圖 4-6。立製成果之樹冠 及孔隙個別的面積及百分比如表 4-3 所示。 圖 4- 6、立製成果與正射影像套合圖 表 4- 3、立製成果樹冠及孔隙面積表 實驗區Ⅰ 實驗區Ⅱ 面積(m2 ) 百分比(%) 面積(m2 ) 百分比(%) 樹冠 849,179.76 84.92 793,862.44 79.39 樹冠孔隙 150,820.24 15.08 206,137.56 20.61 實驗區Ⅰ之立製樹冠孔隙成果如圖 4-7 所示,其中圖 4-7(b)與圖 4-7(f) 為河道區域之孔隙,與正射影像之套疊相當明確;圖 4-7(c)、圖 4-7(d)與圖 4-7(g)因航照色階差異小或受陰影之影響,在立製測繪時較難以判釋,使得 孔隙成果略有偏移現象;而圖 4-7(e)為密樹冠區域,難以萃取樹冠孔隙。此 外,套疊上之微量偏差量,亦可能來自於製作正射影像時,因 DEM 之誤差 所產生的位移。 項 目 類 別
實驗區Ⅰ
實驗區Ⅱ
(a) 實驗區Ⅰ立製樹冠孔隙套疊 (b)區域 1 (c)區域 2 (d)區域 3 (e)區域 4 (f)區域 5 (g)區域 6
1
2
3
4
5
6
實驗區Ⅱ之立製樹冠孔隙成果如圖 4-8 所示,其中樹冠較稀疏之孔隙區 域,因陰影及色階影響,孔隙邊界之判定較為困難如圖 4-8(b)。圖 4-8(c)在 較大的區塊孔隙輪廓套疊明確。圖 4-8(d)狹長樹冠孔隙套疊有微量左上偏 移。圖 4-8(e)寬廣的裸露區樹冠孔隙邊緣立製明確,中間樹冠套疊亦算套合 一致。圖 4-8(f)稀疏樹冠及急坡區套合有較大的偏差量。圖 4-8(g)疏散林區 可見樹冠及孔隙,但陰影成為阻礙難在立體模式下判釋立製。
(a)實驗區Ⅱ立製樹冠孔隙套疊 (b)區域 1 (c)區域 2 (d)區域 3 (e)區域 4 (f)區域 5 (g)區域 6
1
2
3
4
5
6
4.2.3 立製成果小結 以立製方式測繪樹冠孔隙時,影像之陰影與色階是主要的影響因素。陰 影常會使得判釋準確度不佳,當樹冠孔隙位於向陽面時,通常可明確標繪, 但若位於背陽面時,則變得難以判釋(圖 4-7(b))。而當樹冠孔隙位於色階相 近處時(圖 4-8(d)上半部),亦是較難標繪的情形,需由立體視覺判斷高度上 的差異後再行標繪。此外,因立製是由人工方式進行作業,對於狹小之樹冠 孔隙(如圖 4-8(c)),則較難進行立製。 整體而言,立製人員對於立體成像的識別能力及經驗,是樹冠孔隙判釋 成果的主要關鍵。而套疊於正射影像時產生的偏差,除可能在前述立製過程 中所產生,亦可能是正射影像本身存在的偏差。
4.3 地面點法萃取樹冠孔隙實驗
4.3.1 地面點過濾及二元化網格化產出 空載光達點雲使用 TerraScan 進行地面點自動過濾,所得之地面點分佈 如圖 4-9 所示,實驗區(Ⅰ,Ⅱ) 之地面點數為(220,475,277,647)points,地 面點密度為(0.275,0.322)points/m2,自動過濾後之地面點在圖幅上分佈大致 均勻,部份區塊之地面點較密集處可能為樹冠孔隙。 圖 4- 9、自動過濾地面點分佈圖實驗區Ⅰ
實驗區Ⅱ
完成過濾後之地面點由 Point2Grid 予以網格化,使用 1m 為單位網格, 以 0.707m 之半徑進行搜尋,計算每一網格包含地面點數後,再由 ArcGIS 進行二元化處理,得到包含地面點之網格。實驗區(Ⅰ,Ⅱ) 地面點網格數 為(103,544,134,503),如圖 4-10 所示。 圖 4- 10、地面點網格分佈圖 4.3.2 多重回訊過濾及二元化網格產出 首先進行空載光達點雲多重回訊點過濾,萃取出第一及第二回訊點雲, 其成果分佈如圖 4-11 所示。實驗區(Ⅰ,Ⅱ) 之第一、二回訊點數為 (1,273,993,1,912,509)points,點雲密度為(1.273,1.912)points/m2,圖中多重 回訊點較密集處可能為樹冠分佈之區域。
圖 4- 11、多重回訊分佈圖 將前述萃取之第一及第二回訊點雲,由 Point2Grid 予以網格化,使用 1m 為單位網格,以 0.707m 之半徑進行搜尋,得到每一網格所包含第一及第 二回訊之點數,再經 ArcGIS 二元化得多重回訊網格。實驗區(Ⅰ,Ⅱ)之多 重回訊網格數量為(571,472,562,621),如圖 4-12 所示。 圖 4- 12、多重回訊網格分佈圖
4.3.3 樹冠孔隙網格成果產出 將前述之地面點網格扣除其中含有多重回訊網格之部分後,得到之成果 即”僅地面點網格”,實驗區(Ⅰ,Ⅱ)之僅地面點網格數量為(103,544,134,503) 如圖 4-13 所示,相對於地面點網格成果,其樹冠孔隙之形態更為明確。 圖 4- 13、僅地面點網格分佈圖 在僅地面點網格中,包含許多零散網格點與空洞,因此以 ERDAS IMAGINE 進行形態學處理,配合立製作業時以 5 公尺為最小單位,選擇 5×5(空間尺度 5m×5m)為結構元素視窗大小,進行斷開(Opening)及閉合 (Closing)之處理後,得到圖 4-14 之樹冠孔隙成果,但實驗區(Ⅰ,Ⅱ)之樹冠 孔隙網格數量僅有(725,4,675),處理效果不佳。 為避免斷開及閉合處理尺度過大而產生空洞,因此改以 3×3 之為結構元 素視窗大小重新進行形態學處理,此時實驗區(Ⅰ,Ⅱ)之樹冠孔隙網格數量 為(11,849,26,376),如圖 4-15 所示。
圖 4- 14、僅地面點經形態學視窗 5×5 處理之網格分佈圖 圖 4- 15、僅地面點經形態學視窗 3×3 處理之網格分佈圖 4.3.4 地面點法成果分析 觀察圖 4-14 與圖 4-15 不同視窗之樹冠孔隙成果,二者皆有過度平滑化 之現象,以至於大部份的樹冠孔隙網格被濾除,其中又以 3×3 視窗比 5×5 保留較多樹冠孔隙。 為分析不同成果網格之差異,由形態學視窗 3×3 處理之樹冠孔隙網 格,與僅地面點網格成果套疊比較後如圖 4-16(a)所示,其中僅地面點網格 原有較明顯的聚集現象之處,經形態學處理後被濾除許多網格,如圖
4-16(b,c,d,e)所示,主要原因為僅地面點網格零散,經形態學斷開處理而大 部份網格因此先被濾除,而閉合處理時因已無鄰近網格,所以閉合的效果不 明顯,使得樹冠孔隙的成果較不理想。 (a)形態學 3×3 處理與僅地面點網格成果套疊 (b)區域 1 (c)區域 2 (b)區域 3 (c)區域 4 圖 4- 16、形態學 3×3 處理與僅地面點網格成果套疊網格分佈圖 1 2 3 4
另將僅地面點網格與立製成果之面積比較如表 4-4 所示,並以立製孔隙 成果為參考標準,其中實驗區(Ⅰ,Ⅱ)孔隙量為(150,820,206,138)m2,百分 比為(15.08,20.61)%;僅地面點網格實驗區(Ⅰ,Ⅱ)孔隙量為(103,544, 134,503)m2,百分比為(10.35,13.45)%。僅地面點網格尚未經形態學處理與 立製孔隙成果已有差異,差異量經計算以實驗區(Ⅰ,Ⅱ)分別為(47,276, 71,635)m2,百分比為(4.73,7.16)%。此差異量已占立製孔隙量約有三分之 一比例,表示僅地面點萃取孔隙階段網格數量已相當少。 表 4- 4、僅地面點與立製成果差量表 實驗區Ⅰ 實驗區Ⅱ 面積 差量 百分比 差量 面積 差量 百分比 差量 (m2) (%) (m2) (%) 立製成果 849,180 84.92 793,862 79.39 樹冠 僅地面點 763,226 85,954 76.32 8.60 708,691 85,171 70.87 8.52 立製成果 150,820 15.08 206,138 20.61 樹冠 孔隙 僅地面點 103,544 47,276 10.35 4.73 134,503 71,635 13.45 7.16 整理立製孔隙成果及地面點法各階段的萃取數量,以立製成果為參考比 較各階段之萃取網格數量如表 4-5。空載光達由地面點轉為地面點網格,實 驗區(Ⅰ、Ⅱ)孔隙百分比為(23.68,29.13)%,萃取網格數量少皆不足 30%。 後續將扣除的多重回訊網格實驗區(Ⅰ、Ⅱ)百分比為(57.15,56.26)%,皆少 於 60%與立製成果的非孔隙部份約 80%相較下是少量的。扣除量少的情形 下,地面點網格扣除多重回訊網格,得僅地面點網格實驗區(Ⅰ、Ⅱ)百分比 只剩(10.35,13.45)%,與立製孔隙成果(15.08,20.61)%少了許多,因而地面 點網格數量有過於少量的情形。後續形態學處理所萃取網格已出奇的少量, 實驗區Ⅰ、Ⅱ樹冠孔隙已所剩無幾,與立製成果相應為不合理。 表 4- 5、立製成果及地面點法各階段萃取之數量表 萃取網格 實驗區Ⅰ 實驗區Ⅱ 面積(m2) 百分比(%) 面積(m2) 百分比(%) 立製孔隙成果 150,820 15.08 206,138 20.61 多重回訊網格 571,472 57.15 562,621 56.26 地面點網格 236,774 23.68 291,309 29.13 僅地面點網格 103,544 10.35 134,503 13.45 5×5 725 0.07 4,675 0.47 僅含地面點形態學 3×3 11,849 1.18 26,376 2.64 項 目 類 別 項 目 類 別
4.3.5 地面點法小結 根據實驗之結果,以地面點法萃取之樹冠孔隙,與立製之成果有相當差 異。主要是由於經自動過濾之地面點密度僅有(0.275,0.322)points/m2,過少 之地面點使得後續的形態學處理也造成大量網格消失,以致成果不佳。 以圖 4-17 之剖面圖為例,自動過濾地面點時,在二個框選的區域均無 法找到地面點,但此處卻應該是地面點的狀態,因此影響後續的樹冠孔隙萃 取。由此可知,地面點法對自動過濾的正確性要求較高。 圖 4- 17、空載光達自動分類地面點剖面圖
4.4 多重回訊萃取樹冠孔隙實驗
4.4.1 唯一回訊過濾及二元化網格化產出 TerraScan 可依回訊狀態過濾第一回訊、第二回訊、最後回訊及唯一回 訊,首先取出唯一回訊其分佈如圖 4-18 所示,實驗區(Ⅰ,Ⅱ)之唯一回訊點 數分別為(3,351,429,3,130,357)points,密度(3.35,3.13)points/m2,唯一回訊 點雲密佈且均勻。 圖 4- 18、唯一回訊分佈圖 完成過濾後之唯一回訊由 Point2Grid 軟體,使用 1m 為單位網格、搜尋 半徑 0.707m 進行網格化,求得每一網格中包含唯一回訊之點數後,再以 ArcGIS 進行二元化處理,得到唯一回訊之網格成果,如圖 4-19 所示,其中 實驗區(Ⅰ,Ⅱ)之唯一回訊網格數量為(959,280,927,619)。實驗區Ⅰ
實驗區Ⅱ
圖 4- 19、唯一回訊網格分佈圖 4.4.2 多重回訊過濾及二元化網格化產出 另檢視多重回訊(第一、二及最後回訊)之點雲分佈,如圖 4-20 所示,實 驗區(Ⅰ,Ⅱ)多重回訊點數為(2,399,599,3,480,177)points,密度為(2.52, 3.66)points/m2,第一、二及最後回訊點雲含有樹冠分佈資訊。 圖 4- 20、第一、第二及最後回訊分佈圖 將前述萃取之第一、二及最後回訊點雲,由 Point2Grid 予以網格化,使 用 1m 為單位網格,以 0.707m 之半徑進行搜尋,得到每一網格所包含第一、
圖 4- 21、多重回訊網格分佈圖 4.4.3 樹冠孔隙網格成果產出 萃取出唯一回訊及多重回訊二元化網格後,將唯一訊網格扣除包含多重 回訊之網格,得到僅唯一回訊網格,依實驗區(Ⅰ,Ⅱ)之網格數量分別為 (273,368,170,003),其分佈如圖 4-22 所示。 圖 4- 22、僅唯一回訊網格分佈圖
為濾除密樹冠區域之網格,因此引入回訊之高程差值以濾除密樹冠回訊 網格。其中回訊之高程差表示在樹林中之高度差異,在此先取高差門檻值為 5m,當回訊高程差大於 5m,對應之僅唯一回訊網格視為密樹冠網格予以濾 除。濾除密樹冠後剩餘僅唯一回訊網格,實驗區(Ⅰ,Ⅱ)之網格數量為 (167,330,119,490),如圖 4-23 所示。 圖 4- 23、濾除密樹冠之僅唯一回訊網格分佈圖 多重回訊網格可能為較低矮之草叢回訊網格,亦是屬於樹冠孔隙部份, 因此需要加以萃取。因此針對多重回訊網格部份,依相同概念加入回訊高程 差之判斷,將低矮之草叢回訊網格取回。定義門檻值為 2m,低於此高程差 則視為樹冠孔隙。得多重回訊萃取之樹冠孔隙網格成果,實驗區(Ⅰ,Ⅱ)之 網格數量為(42,831,34,641),如圖 4-24 所示。
圖 4- 24、多重回訊萃取之樹冠孔隙網格分佈圖 將濾除之密樹冠與萃取之草叢之樹冠孔隙合併後,實驗區(Ⅰ,Ⅱ)之樹 冠孔隙網格數為(210,161,154,131),如圖 4-25 所示,整體樹冠孔隙形態大 致完整。 圖 4- 25、樹冠孔隙合併分佈圖 在上述成果與立製樹冠孔隙比對前,假設孔隙之面積均為 5m×5m 以 上,因此先以 ERDAS IMAGINE 做形態學處理,選擇結構元素視窗大小 5×5(空間尺度 5m×5m)矩陣斷開及閉合處理,得到多重回訊法萃取樹冠孔隙 之成果,如圖 4-26 所示。實驗區(Ⅰ,Ⅱ)成果之網格數量分別為(135,011, 103,359),孔隙區塊之成果較為完整。
圖 4- 26、形態學 5×5 處理之網格分佈圖
此孔隙成果與立製成果套合後如圖 4-27 所示,其中大面積孔隙之分佈 相當接近,但立製成果較為聚集,多重回訊法萃取成果則較為分散。
4.4.4 網格化套合分析 以現行樹冠孔隙量測方式-立製量測成果為參考,將立製與多重回訊法 所得樹冠與孔隙成果套合,比較樹冠及孔隙萃取的異同,評估本研究方法是 否可適用於樹冠孔隙之量測。 使用 ArcGIS 套合分析,將套合異同狀態分色如下表: 表 4- 6、立製與多重回訊法異同分色表 多重回訊萃取 樹冠 孔隙 樹冠 立製量測 孔隙 (1)同萃取為樹冠區域分色為藍;(2)同萃取為孔隙分色為深綠;(3)立製 萃取為孔隙但多重回訊法萃取為樹冠分色為紅;(4)立製萃取為樹冠但多重 回訊法萃取孔隙分色為淺綠,立製與多重回訊法套疊比較,如圖 4-28 所示。 圖 4- 28、立製與多重回訊法套合疊比較圖 兩者萃取相同區域由藍色與深綠色共同組成,換算各分色面積數量如表 4-6 所示、百分比如表 4-7 所示。相同萃取之部份實驗區(Ⅰ,Ⅱ)百分比為 (83.47,82.68)%,兩者皆高達 82%以上;相異處實驗區(Ⅰ,Ⅱ)百分比為 (16.54,17.32)%。其中狀態(3)(立製萃取為孔隙多重回訊法萃取為樹冠,即 紅色)所占比例較多,有分佈集中的特性。狀態(4)(立製萃取為樹冠但多重回 訊法萃取孔隙,即淺綠)分佈則較為零散。由相同百分比程度,整體多重回 訊法萃取狀態之相同度有 82%以上,相似度為高。
實驗區Ⅰ
實驗區Ⅱ
表 4- 7、立製與多重回訊法異同面積量表 多重回訊萃取 Ⅰ Ⅱ 面積(m2 ) 樹冠 孔隙 樹冠 孔隙 樹冠 769,584 69,952 749,932 26,476 立製量測 孔隙 95,405 65,059 146,709 76,883 表 4- 8、立製與多重回訊法異同百分比表 多重回訊萃取 Ⅰ Ⅱ 百分比(%) 樹冠 孔隙 樹冠 孔隙 樹冠 76.96 7.00 74.99 2.65 立製量測 孔隙 9.54 6.51 14.67 7.69 進一步針對少量差異的部份,細部評估立製與多重回訊法之正確性。以 剖線剖面的方式比較,輔助以正射影像辯識地表地物形態,再以光達點雲高 程剖面明確的樹冠及孔隙區分做為基礎依據,分別對應立製與多重回訊法各 別萃取之樹冠孔隙比較正確與否。挑選差異 17.32%較為明顯的實驗區Ⅱ進 行套合分析,套合圖中選擇代表差異性的 6 條剖線,如圖 4-29 所示。
實驗區Ⅱ
剖線 1 套合分析,如圖 4-30 所示。圖 4-30(a)立製與多重回訊法萃取孔 隙套合圖,紫線為分析剖線。圖 4-30(b)為對應剖線及正射影像區域,樹冠 高低交錯有陰影及孔隙分佈。圖 4-30(c)套合剖面,分色表示回訊狀態;白 色向下箭頭為真實孔隙位置;間斷橫紫線為對應的剖線範圍,紫色單一線段 為 4m;藍線為多重回訊法萃取孔隙;綠線為立製萃取孔隙;粉紅色圈繪為 多重回訊法錯誤萃取;紅色圈繪為立製錯誤萃取。其中多重回訊法僅有小區 段的錯誤孔隙萃取(誤授,commission),立製則有較多誤授及最右方小區段 遺漏未萃取的孔隙(漏授,omission)。(以相同標示類推說明其餘剖線狀態) (a)套合圖 (b)正射影像 (c)套合剖面 第一回訊 第二回訊 最後回訊 唯一回訊 多重回訊孔隙 立製孔隙 剖線 多重回訊錯誤 立製錯誤 圖 4- 30、剖線 1 套合分析圖
剖線 2 套合分析,如圖 4-31 所示。圖 4-31(a)套合圖、圖 4-31(b)正射影 像及圖 4-31(c)套合剖面,此區為樹冠及狹長的孔隙分佈。白色向下箭頭為 樹冠孔隙位置;剖線(紫線,剖線單段為 4m);多重回訊(藍)與立製(綠)之樹 冠孔隙範圍;多重回訊法錯誤(粉紅)與立製錯誤(紅)圈繪。4-31(c)套合剖面 上多重回訊法為三處少數量的漏授,但立製則有多處的誤授發生。 (a)套合圖 (b)正射影像 (c)套合剖面 第一回訊 第二回訊 最後回訊 唯一回訊 多重回訊孔隙 立製孔隙 剖線 多重回訊錯誤 立製錯誤 圖 4- 31、剖線 2 套合分析圖
剖線 3 套合分析,如圖 4-32 所示。圖 4-32(a)套合圖、圖 4-32(b)正射影 像及圖 4-32(c)套合剖面,此區為樹冠與孔隙交錯間隔。白色向下箭頭為樹 冠孔隙位置;剖線(紫線,剖線單段為 4m);多重回訊(藍)與立製(綠)之樹冠 孔隙範圍;多重回訊法錯誤(粉紅)與立製錯誤(紅)圈繪。圖 4-32(c)套合剖面 由左至右,多重回訊法為一處的漏授,但立製則為多處的誤授。 (a)套合圖 (b)正射影像 (c)套合剖面 圖 4- 32、剖線 3 套合分析圖
剖線 4 套合分析,如圖 4-33 所示。圖 4-33(a)套合圖、圖 4-33(b)正射影 像及圖 4-33(c)套合剖面,此區為少量樹冠的斜坡裸露地。綠色向下箭頭為 樹冠位置;剖線(紫線,剖線單段為 4m);多重回訊(藍)與立製(綠)之樹冠孔 隙範圍;多重回訊法錯誤(粉紅)與立製錯誤(紅)圈繪。多重回訊法及立製同 為多處的漏授,但漏授分佈的區段不同,多重回訊法漏授分佈於斜坡裸露 區,立製之漏授孔隙則多分佈在含有樹冠的交錯區域。 (a)套合圖 (b)正射影像 (c)套合剖面
剖線 5 套合分析,如圖 4-34 所示。圖 4-34(a)套合圖、圖 4-34(b)正射影 像及圖 4-34(c)套合剖面,此區為寬廣的裸露地及斜坡孔隙。白色向下箭頭 為樹冠孔隙位置;剖線(紫線,剖線單段為 4m);多重回訊(藍)與立製(綠)之 樹冠孔隙範圍;多重回訊法錯誤(粉紅)與立製錯誤(紅)圈繪。圖 4-34(c)套合 剖面其多重回訊法為二處的漏授,立製則是較多的誤授情形。 (a)套合圖 (b)正射影像 (c)套合剖面 圖 4- 34、剖線 5 套合分析圖
剖線 6 套合分析,如圖 4-35 所示。圖 4-35(a)套合圖、圖 4-35(b)正射影 像及圖 4-35(c)套合剖面,此區為較疏之樹冠及帶有少數孔隙分佈。白色向 下箭頭為樹冠孔隙位置;剖線(紫線,剖線單段為 4m);多重回訊(藍)與立製 (綠)之樹冠孔隙範圍;多重回訊法錯誤(粉紅)與立製錯誤(紅)圈繪。圖 4-34(c) 套合剖面其多重回訊法為一處旁邊微量的誤授,立製則是誤授與漏授都有較 多的發生情形。 (a)套合圖 (b)正射影像 (c)套合剖面 圖 4- 35、剖線 6 套合分析圖
由上述分析歸納: 立製與多重回訊法萃取孔隙成果相同度高達 82%,多重回訊法所萃取之 樹冠孔隙對於森林應用是具有參考價值。 針對相異部份,以上 6 條剖線分析明顯發現立製成果的錯誤量多出許 多。將錯誤量分為誤授與漏授二種,單一討論立製錯誤量部份,其誤授比例 較高。對照正射影像與誤授發生的位置,主要為陰影影響所造成。陰影造成 的誤授有:(1)小區塊遮蔽誤以為孔隙;(2)狹長孔隙邊界判定錯誤;(3)樹冠 交錯孔隙分佈造成的誤判。而立製的漏授則是多在疏樹冠與孔隙交錯的狀態 下容易產生。 多重回訊法成果表現較佳,整體錯誤量不多。在誤授量的表現,相對立 製少了許多,即使有誤授亦是少量。單一討論多重回訊法錯誤量,其漏授的 比例較高,其主要發生在裸露的斜坡地。 不論誤授或漏授,整體立製表現較差,誤錯的頻率較多。立製誤授的情 況較多,通常是包含著正確的孔隙區域,但因陰影處為太暗及近似的色階難 以判定,誤判的孔隙寬度亦通常大於實際孔隙,使其誤授量增加。多重回訊 法的誤授多位於樹冠與孔隙交界的小量。漏授亦是立製多於多重回訊法,僅 是兩者發生狀態不盡相同。
4.4.5 僅唯一回訊過濾分析 空載光達多重回訊萃取之樹冠孔隙,源自僅唯一回訊網格,而僅唯一回 訊網格非全屬樹冠孔隙,其中包含密樹冠回訊網格,因而濾除密樹冠回訊網 格成為影響成果優劣之因素。 濾除的參考依據為回訊高程差及濾除門檻△ha,先以引入回訊高程差之 濾除成效進行分析。而回訊高程差可表示為地面物件之高度分佈,如圖 4-36 所示。在此分析先將濾除門檻△ha定訂為 5m,以觀察密樹冠網格濾除情形。 圖 4- 36、最高唯一回訊與最低最後回訊之高程差圖 表 4-8 為僅唯一回訊網格濾除密樹冠回訊網格前、後之數量,濾除差量 實驗區(Ⅰ,Ⅱ)約為(11,5)×104,其中實驗區Ⅰ含有較多密樹冠回訊網格。 表 4- 9、僅唯一回訊濾除密樹冠回訊網格前、後數量表 樹冠孔隙 實驗區Ⅰ 實驗區Ⅱ 面積量(m2) 百分比(%) 面積量(m2) 百分比(%) 僅唯一回訊網格 273,368 27.34 170,003 17.00 濾除密樹冠僅唯一回訊網格 167,330 16.73 119,490 11.95
實驗區Ⅰ
實驗區Ⅱ
項 目 類 別另以僅唯一回訊網格為基礎,將濾除的密樹冠回訊網格展示對照,濾除 前、後分佈形態,如圖 4-37 所示。挑選不同分佈的濾除網格,以 5 條參考 剖線進行分析。 圖 4- 37、密樹冠回訊網格濾除前、後及分析剖線圖 評判濾除密樹冠回訊網格之成效,包含濾除分佈狀態、對應的正射影像 區域、回訊高程差圖及光達點雲與濾除前、後孔隙範圍之套合剖面,可明確 表現樹冠及孔隙分佈,以確認濾除之成效,剖線分析如下:
剖線 1 濾除密樹冠套合分析,如圖 4-38 所示。圖 4-38(a)濾除分佈圖為 僅唯一回訊網格與濾除的密樹冠網格分佈,紅線為分析剖線;圖 4-38(b)為 對應之剖線及正射影像區域,此區為裸露的斜坡地,僅有少數的樹冠;圖 4-38(c)回訊高程差為輔助過濾的地物高度;圖 4-38(d)濾除前、後孔隙範圍 與空載光達點雲套合剖面。圖 4-38(d)中間間斷橫紅線為對應的剖線範圍, 單一紅線段為 4m;藍色與綠色線段個別為濾除前、後之孔隙範圍;黃色與 紅色圈繪個別為正確與錯誤濾除(以相同標示類推說明其餘剖線狀態)。 在此區域有一小邊緣樹冠的正確濾除,中間則有較大的錯誤濾除,對應 正射影像及光達點雲剖面皆非樹冠區域,但對應回訊高程差圖則有較高的地 物反應,因此產生濾除密樹冠的處理。 (a)濾除分佈圖 (b)正射影像 (c)套合剖面
剖線 2 濾除密樹冠套合分析,如圖 4-39 所示。圖 4-39(a)為濾除分佈圖; 圖 4-39(b)為對應正射影像區域,此區為樹冠覆蓋且有少數的孔隙分佈,於 正射影像較難以判斷;圖 4-39(c)對應之回訊高程差;圖 4-39(d)濾除前、後 孔隙範圍與空載光達點雲套合剖面。圖 4-39(d)中間間斷紅線為對應剖線, 單線段為 4m;藍、綠線為濾除前、後之孔隙;黃、紅圈繪為正確與錯誤之 濾除。 此區正射影像及回訊高程差都可見地物樹冠形態,套合剖面上濾除前包 含許多密樹冠回訊網格,圖 4-39(c)濾除後大致的密樹冠回訊網格已正確濾 除,僅剩微量單一的密樹冠回訊網格未濾除的錯誤產生。 (a)濾除分佈圖 (b)正射影像 (c)回訊高程差 (c)套合剖面 第一回訊 第二回訊 最後回訊 唯一回訊 濾除前之孔隙 濾除後之孔隙 剖線 正確濾除 錯誤濾除 圖 4- 39、剖線 2 濾除密樹冠套合分析圖
剖線 3 濾除密樹冠套合分析,如圖 4-40 所示。圖 4-40(a)為濾除分佈圖; 圖 4-40(b)為對應正射影像區域,此區為大量的樹冠覆蓋,幾乎未有孔隙的 分佈;圖 4-40(c)對應的回訊高程差;圖 4-40(d)濾除前、後孔隙範圍與空載 光達點雲套合剖面。圖 4-40(d)中間間斷紅線為對應剖線範圍,單線段為 4m; 藍、綠線為濾除前、後之孔隙;黃、紅圈繪為正確與錯誤濾除。 此區正射影像可見樹冠密佈情形,回訊高程差圖反應此區地物具一定之 高度。圖 4-40(d)濾除前包含幾乎佈滿的密樹冠回訊網格,濾除後大量的密 樹冠回訊網格已正確濾除,僅剩少許樹冠回訊未濾除的錯誤產生,對照正射 影像與濾除分佈圖可知濾除密樹冠回訊網格成效。 (a)濾除分佈圖 (b)正射影像 (c)回訊高程差 (c)套合剖面
剖線 4 濾除密樹冠套合分析,如圖 4-41。圖 4-41(a)濾除分佈圖;圖 4-41(b) 為對應正射影像區域,此區為不同坡度變換之裸露凹地;圖 4-41(c)為對應 之回訊高程差;圖 4-41(d)濾除前、後孔隙範圍與空載光達點雲套合剖面。 圖 4-41(d)中間間斷紅線為對應剖線範圍,單線段為 4m;藍、綠線為濾除前、 後之孔隙;黃、紅圈繪為正確與錯誤濾除。 此區濾除分佈圖上有數個區塊被濾除,正射影像陰影遮蔽較難辨視中間 地物,圖 4-41(d)可確定為裸露地未包含樹冠之區域,但此區卻有密樹冠回 訊網格錯誤濾除反應。錯誤濾除四個區段,對應圖 4-41(c)有相應的四個區 段,此濾除來自回訊高程差之影響,回訊高程差含有區塊性錯誤,因而造成 對應的錯誤濾除區塊(濾除分佈圖濾除區塊與回訊高程差錯誤區塊相像)。 (a)濾除分佈圖 (b)正射影像 (c)回訊高程差 (c)套合剖面 圖 4- 41、剖線 4 濾除密樹冠套合分析圖
剖線 5 濾除密樹冠套合分析,如圖 4-42 所示。圖 4-42(a)為濾除分佈圖; 圖 4-42(b)為對應正射影像區域,此區為樹冠較剖線 3 疏之區域偶有孔隙; 圖 4-42(c)對應的回訊高程差;圖 4-42(d)濾除前、後孔隙範圍與空載光達點 雲套合剖面。圖 4-42(d)中間間斷紅線為對應剖線範圍,單線段為 4m;藍、 綠線為濾除前、後之孔隙;黃、紅圈繪為正確與錯誤濾除。 此區包含較為零散的密樹冠回訊網格,正射影像可見樹冠分佈,回訊高 程差表現此區地物具一定高度。圖 4-42(d)可見正確濾除大部份的密樹冠回 訊網格,僅在樹冠與孔隙交界有少數零星錯誤未濾除狀態。 (a)濾除分佈圖 (b)正射影像 (c)回訊高程差 (c)套合剖面 圖 4- 42、剖線 5 濾除密樹冠套合分析圖
由上述分析歸納: 空載光達多重回訊法對密樹冠回訊網格的濾除,以不同樹冠密佈程度剖 線(剖線 2,3,4)分析,所見密樹冠回訊網格幾近濾除,其成效是良好的。針對 發生的濾除誤以下一一說明。 樹冠孔隙網格錯誤未能濾除的部份,微量零散單一的錯誤(剖線 2),這 些微量零星的錯誤在此過程確實有未濾除的情形,但針對這類的錯誤可以在 後續的形態學斷開處理被除去。樹冠上唯一回訊與最後回訊臨近錯誤,這類 形錯誤發生在高密度樹冠區(剖線 3),但此類錯誤出現機會不高,且此類的 錯誤亦可在後續的形態學斷開處理除去。 樹冠孔隙網格錯誤濾除的部份,此類錯誤主要深受回訊高程差影響,且 發生在坡地裸露區(剖線 1,4),其主因來自於回訊高程差異常。如圖 4-43 所 示,裸露區多屬唯一回訊,較少量之最後回訊,因而有最後回訊空缺區則由 內插產生數值,加上地形坡度大及變化時,形成最高唯一回訊與內插最後回 訊之高落差狀態異常。 圖 4- 43、唯一回訊與最後回訊內插示意圖 多重回訊法對密樹冠回訊網格的濾除,將特殊的回訊高程差內插錯誤暫 不考慮,以及微量零散單一的錯誤可後續濾除,因而整體的濾除成效是非常 良好的,所得樹冠孔隙亦良好的成果。
4.4.6 濾除密樹冠門檻值比較 由於僅唯一回訊網格在密樹冠區域包含密樹冠回訊網格,因此在僅唯一 回訊網格中需加入樹高門檻值△ha之判斷,回訊高程差大於此門檻值即被濾 除。在此假設一般樹高為 3m 以上,並以 7m、5m、3m 之三種門檻值進行試 驗,以分析萃取之差異,其成果如圖 4-44,、圖 4-45 及圖 4-46 所示。成果 顯示樹高門檻值△ha越小,則遭濾除之密樹冠網格越多,依實驗區(Ⅰ,Ⅱ) 門檻值 7m 數量為(188,549,127,509)、門檻值 5m 數量為(167,330,119,490)、 門檻值 3m 數量為(132,733,98,477)。 圖 4- 44、門檻值 7m 濾除密樹冠回訊網格圖
圖 4- 46、門檻值 3m 濾除密樹冠回訊網格圖 濾除程度的不同造成網格數量上的差異。表 4-9 為各門檻剩餘僅唯一回 訊網格數量及差異量,另外以無濾除之僅唯一回訊網格數量為基底計算百分 比參考。門檻值 7 與原始無門檻之濾除差異量為最大,已占整體約四分之一 量,門檻值 5、3 中間則有相對較多之差異量,因此量包含回訊高程差內差 造成的濾除錯誤。將濾除差異量分別套色,可見其濾除分佈狀態,如圖 4-47 所示。 表 4- 10、各門檻剩餘僅唯一回訊網格數量及差異量表 實驗區Ⅰ 實驗區Ⅱ 門檻值 剩餘僅唯一回訊網格 濾除差異量 剩餘僅唯一回訊網格 濾除差異量 無 273,368 170,003 84,819(31.03) 42,491(24.99) 7 188,549 127,509 21,219(7.76) 8,019(4.72) 5 167,330 119,490 34,597(12.66) 21,013(12.36) 3 132,733 98,477 *()中是以無濾除之僅唯一回訊為基底計算之百分比作為參考
對於門檻值間的濾除差異,以尋找濾除變化量較大之處,比較不同的濾 除程度所造成的影響做為探討,討論門檻值的適切性(回訊高程差內插造成 錯誤,在此不加以做為門檻值相關討論)。分析過程相同引入空載光達剖面 點雲高程做為基準及正射影像套合剖線比較濾除狀態,分別以六條剖線探 討,如圖 4-47 所示。 圖 4- 47、濾除門檻之網格分佈圖