USING SMART MOBILE DEVICE FOR INDOOR NAVIGATION
WITH SCENE CONSTRAINT
Dong-Chi Wu
1and Fang-Shii Ning
21National Chengchi University, NO.64, Sec.2, ZhiNan Rd., Wenshan District, Taipei City 11605, Taiwan (R.O.C) 1Email: [email protected]
2National Chengchi University, NO.64, Sec.2, ZhiNan Rd., Wenshan District, Taipei City 11605, Taiwan (R.O.C) 2Email: [email protected]
ABSTRACT: The usages of the navigation and location have become essential from nowadays because of the fast development of mobile device and the navigation technique. It is easy to use Global Navigation Satellite System (GNSS) to locate and navigate outdoors. Signals of GNSS are obstructed so navigation and positioning cannot apply indoors. Hence, methods of indoor positioning thriving like Wireless, Bluetooth, RFID, IBeacon etc.
Every method of indoor positioning has different cost and it directly affects the selection of indoor positioning technique. This study uses data of gyroscope and accelerometer from Micro Electro Mechanical Systems (MEMS) and detects footsteps by using filter to smooth the signal, and then estimate the step length by the ordinary least square. The position is computed by Pedestrian Dead Reckoning (PDR) method and used azimuth between object and check point to adjust position. The results of this study show using the Savitzky-Golay Filter to detect footsteps and applying azimuth to adjust position can get the walk tracks closure down to 0.789m.
KEY WORDS: Indoor Navigation, Pedestrian Dead Reckoning, Savitzky-Golay Filter, Scene Constraint
1.
INTRODUCTION
From nowadays, it is efficient to locate and position outdoors because of the complete development of GNSS and it is much easier for user to know where they are by overlapping the related map data. However, signals of GNSS are obstructed so it needs to use technology like RFID, Wireless or Bluetooth to finish indoor navigation and position. Every method of indoor position has different cost and it directly affects the selection of indoor positioning technique. In general terms, indoor position will become high-cost-technique for users to install Wireless Station or I-beacon by themselves, so it can lower the barriers for buyers by reducing the cost.
While mobile devices became more common, the function of mobile became multivariate and Micro Electro Mechanical Systems (MEMS) have become essential for gaming, map location and altitude prediction, so the use of MEMS have become more widely.
The cost of indoor position will decide whether the use threshold is high or not. Wireless indoor position needs at least three signal stations for mobile devices to finish locating by receiving Received Signal Strength Indication (RSSI). And if using I-beacon as the correction to improve the result of indoor position, it also need to install a lot of I-beacons indoor, it is really hard for general users to set up equipment.
To reduce the use threshold for indoor position and let the general users can use the indoor position technique in reasonable error range, this study tries to get the accelerometer and gyroscope data from MEMS, and improve the correct rate of step detect by using Filter. Finally, position is computed by Pedestrian Dead
Reckoning (PDR) method and used azimuth between object and check point to adjust position.
2.
METHOLOGY
2.1 Pedestrian Dead Reckoning (PDR)
This study use Pedestrian Dead Reckoning to compute coordinates, and it is a relative navigation technique. Starting from a known position, the successive position displacements are added up (Beauregard and Haas, 2006).
Base on the result of step detecting, the time to compute the coordinate is decided. It can compute the coordinate at time n+1 base on the coordinate at time n.
θ θ sin cos 1 1 × + = × + = + + StepLength y y StepLength x x n n n n (1)
where
x ,
ny
n = coordinate at time point n 11
,
++ n
n
y
x
= coordinate at time point n+1θ
= angle of rotation at time point n+12.2 Step Detect
To improve the accuracy of step detecting, this study use Savitzky-Golay Filter (SG Filter) to smooth the accelerometer signal and reduce the noise. SG Filter using least-squares to smooth signal and reduces noise while maintaining the shape and height of waveform peaks(Schafer, 2011), so it is suitable to detect step
because of not changing the numbers of peaks from the original data.
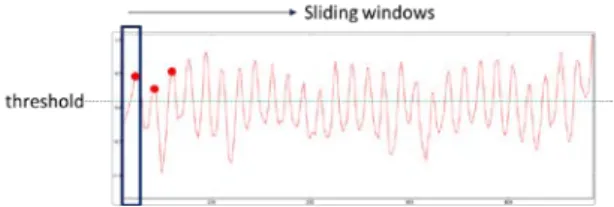
After reducing the noise, the improved Wolf method was used to detect the step in this study. The improved Wolf method are combined the Wolf method and sliding windows to detect signal amplitudes(Marschollek et al., 2008). The improved Wolf method detect the foot step by detecting the peak with the sliding windows, it is much easier than the original Wolf method. Once the peak value is greater than the threshold value, one step was counted and the sliding window moves to the next data.
2.3 Step Length
The estimation of step length usually adds height and step frequency as the independent variable in multiple regression analysis (Kroger et al., 2010; Renaudin et al., 2012). In order to test whether the leg length is the important factor for step length or not, this study uses the Renaudin’s regression model which is based on ordinary least-squares and adds the leg length as the new independent variable to estimate the step length.
c Height b f LegLength a StepLength= ⋅ ⋅ step + ⋅ + (2)
where a, b, c = the regression coefficients
step
f
= walk frequencyEquation (2) can be written as the matrix and base on the hypothesis of ordinary least-square
V
TPV
=
min
, the result of regression coefficient are gotten through the equation (3), (4), (5). (5) 1 (4) (3) 1 ) ( 1 = − = = − = − c b a W N X PL T A W PA T A N 2.4 Scene ConstraintPDR error depends on time, therefore error sources of the PDR are from distance and angle. The error of distance limited by improved the rate of step detection
and the estimation of pace length. However, the error from angle cannot be reduced by the method above.
Figure 2. error from angle Figure 3. error from distance The scene creates a rectangular figure room as figure 4. Testing will start and end at point A along the direction of the arrow. The grey points are positions computed by PDR, and the reference point is known because of scene established. Hence, once the position is computed, the azimuth from the reference point is computed also.
In real, the position will drift with the time. Hence, it need to correction the coordinate to insure the right position in indoor environment.
Figure 4. Scene of testing
In Figure5, there are four known points (Correction point) at the four sides of the rectangle. Hence, the azimuth can be computed from the correction point to reference point (the blue line in Figure5). Because of the drift, computed positions by PDR will not on the rectangle sides (the real walking track), this study uses azimuths to be a condition deciding to adjust the drift. Once the azimuth from the computed position to reference point is close enough to the azimuth from correction point to the reference point, adjust the coordinate point to the correction point and make it as the initial point to compute the next position.
Figure 5. Drift correction
3.
FIELD TEST AND RESULT
3.1 Step detect
Through the SG Filter to smooth the accelerometer signal and reduce the noise, detecting the foot step by using the improved Wolf method. The experiment is divided into two parts. First part is done by fifteen people all walk for ten steps with smart phone getting the accelerometer data, and compare the detected step with Figure 1. Sliding windows peak detect
real step. Second part is done by seven people walking around the basketball court with smart phone getting the accelerometer data and compare the real step and the detected step. The results are shown in Table 1:
Table 1. First part step detect experiment Experiment Real step Mean Error
First part 10 1.0
Second Part 129~135 0.866
The result of step count detection shows that using SG Filter to smooth and reducing the accelerometer noise with the improved Wolf method can get the mean error in foot step count 1 step in first part test, and 0.866 step in second part test. The result of this experiments show that no matter the number of walking step is long or short, the error step can be control in approximately one step.
3.2 Step length estimation
The estimation experiment of step length model is 64 samples evenly composed of man and women. Leg length, walking time and distance collected separately.
Based on Renaudin’s multiple regression, the result of the length of step estimation is shown in Figure 6 and Table 2:
Figure 6. Regression Result (Left: Renaudin’s model, Right: This Study)
Table 2. Statistical results (Renaudin’s model) Renaudin’s model This study Dep. Variable Step length
Ind. Variable Height, height*
Leg length, height* Method Least-square Least-square
No. Observation
128 128
0.191 0.166
F-statistic 14.79 12.47
In Table 2, the F-Statistic in both experiment are all significance, it indicate that both regression model are acceptable. is not so great in both experiment, however, both multiple regression analysis are non-time series.
By out-of-sample test, the accuracy of two regression model can be verified by using equation (6):
where ES = the estimated step length RS = the real step length
In order to test the accuracy of the model, 12 person’s data put into both regression models and the result are shown in Table 3:
Table 3. Result of Model testing Renaudin’s model This study Error (unit: m) Accuracy (unit: %) Error (unit: m) Accuracy (unit: %) 0.074 88.6 -0.048 91.18
In Table 3 show that the multiple regression model used in this study can improved the accuracy of step length estimation from 88.6% to 91.18%. Hence, it can speculate that leg length is one of the factors affecting the step length.
3.3 Scene constraint
Applying azimuths adjusting postion can reduced the PDR error from angle. There are seven groups of data in this experiment, the result of PDR without adjusting the coordinate is shown in Figure 7:
Figure 7. Result of PDR without adjusting In Figure 7, all the walking tracks are not on the real track (black rectangle), and the end point are not close to the start point after walking around.
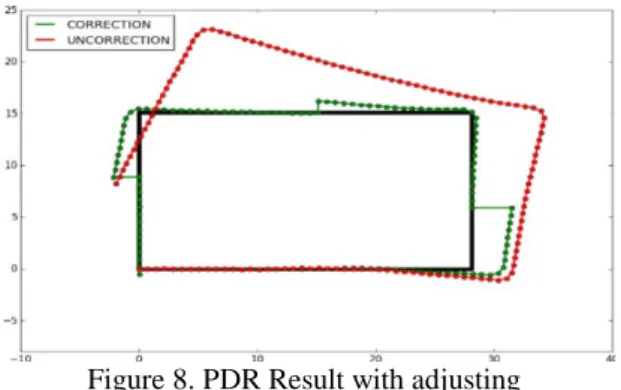
In Figure 8, the track correction is much more coinciding with the real track than the track uncorrected. It indicated that applying azimuths to adjust position can make the track much in line with real track.
Table 4. PDR Result Uncorrected Corrected Closure (unit: m) Relative Accuracy Closure (unit: m) Relative Accuracy 3.808 4.406% 0.789 0.913%
In Table 4 shows the mean closure and relative accuracy computed by seven groups of experiments data. By adjusting position, it can get the closure from 3.808 meter to 0.789 meter. Hence, the result shows that the method of this study can improve the indoor position accuracy effectively.
4.
CONCLUSIONS
This study shows that using Savitzky-Golay Filter to smooth the accelerometer signals and reduce the noise can improve the accuracy of detecting step, the error of step detect is just one in every 129~135 steps. Adding leg length as the new independent variable in multiple regression analysis can improve the accuracy of step length estimate from 88.6% to 91.18%. In addition, the error of PDR can be limited by establishing the scene to constraint the drift of position, through applying azimuths to adjust position can get the closure from 3.808 meter to
0.789 meter, and generally improved the accuracy of indoor position.
5.
REFERENCES
Beauregard, S. and Haas, H., 2006. Pedestrian dead reckoning: A basis for personal positioning, Proceedings of the 3rd Workshop on Positioning, Navigation and Communication, pp. 27-35. Kroger, T., Chen, Y., Pei, L., Tenhunen, T., Kuusniemi,
H., Chen, R. and Chen, W., 2010. Method of pedestrian dead reckoning using speed recognition. 1-8.
Marschollek, M., Goevercin, M., Wolf, K.-H., Song, B., Gietzelt, M., Haux, R. and Steinhagen-Thiessen, E., 2008. A performance comparison of accelerometry-based step detection algorithms on a large, non-laboratory sample of healthy and mobility-impaired persons, Engineering in Medicine and Biology Society, 2008. EMBS 2008. 30th Annual International Conference of the IEEE. IEEE, pp. 1319-1322.
Renaudin, V., Susi, M. and Lachapelle, G., 2012. Step length estimation using handheld inertial sensors. Sensors (Basel), 12(7): 8507-8525.
Schafer, R.W., 2011. What Is a Savitzky-Golay Filter? [Lecture Notes]. Signal Processing Magazine, IEEE, 28(4): 111 - 117.