WCDMA系統之手機協助/通道預測型功率控制機制
68
0
0
全文
(2) WCDMA 系統之手機協助/通道預測型功率控制機制. Mobile-Assisted and Channel-Fading-Prediction-Based Power Control for WCDMA Systems with Error-Prone Channels. 研 究 生︰張凱元 指導教授︰張仲儒. Student: Kai-Yuan Chang Advisor: Dr. Chung-Ju Chang. 教授. 國立交通大學 電信工程學系碩士班 碩士論文. A Thesis Submitted to Institute of Communication Engineering College of Electrical Engineering and Computer Science National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering June 2005 Hsinchu, Taiwan, Republic of China 中華民國九十四年六月. 2.
(3) WCDMA 系統之手機協助/通道預測型功率控制 機制 研究生︰張凱元. 指導教授︰張仲儒教授. 國立交通大學電信工程學系碩士班 中文摘要 在本論文中,提出了一種手機協助/通道預測型功率控制的機制。它由兩種 方法所組成。在基地台端,使用了一種通道預測型功率控制方式,和其他傳統預 測型功率控制機制比較起來,它能夠比較準確的預測訊號雜訊比。在手機端,使 用了一種手機協助的功率控制方法。除了根據收到的功率控制指令以外,又參考 通道增益的斜率才調整傳送訊號功率,所以這個方法不但能消除錯誤的功率控制 指令的影響,又能減輕預測誤差的影響。模擬結果展現了手機協助/通道預測型 功率控制機制有最低的錯誤機率。在容易發生錯誤的情況下,手機協助/通道預 測型功率控制機制一比訊號雜訊比預測型以及鏈路增益預測型功率控制機制還 多出了 52.9%和 116.6%的系統使用人數。而手機協助/通道預測型功率控制機制二 比訊號雜訊比預測型以及鏈路增益預測型功率控制機制還多出了 70.5%和 141.6% 的系統使用人數. 3.
(4) Mobile-Assisted and Channel-Fading-Prediction-Based Power Control for WCDMA Systems with Error-Prone Channels. Student: Kai-Yuan Chang. Advisor: Dr. Chung-Ju Chang. Institute of Communication Engineering National Chiao Tung University. Abstract The thesis proposes a mobile-assisted and channel-fading-prediction-based (MA-CFP) power control (PC) scheme for WCDMA systems with error-prone channels. There are two PC methods used in the MA-CFP PC scheme. The first one, which is used at the base station, is channel-fading-prediction-based PC method and it can reduce the prediction error. The second one, which is applied at the mobile-station, is the mobile-assisted PC method and it can mitigate the effect of the PC command error due to noisy channel, and prediction error. Simulation results show that the MA-CFP PC scheme 1 can achieves lower outage probability and higher system capacity than conventional link-gain and SIR prediction-based PC schemes by an amount of 52.9% and 116.6%, respectively. The MA-CFP PC scheme 2 can further increase the system capacity by the amount of 70.5% and 141.6% than link-gain and SIR prediction-based PC scheme, respectively, in error-prone channel.. 4.
(5) 誌謝 回顧這兩年的學習過程,經歷了相當多的辛苦,當然也就有不少的收穫。不管所 學的知識為何,我確信最重要的是解決問題的過程,以及不屈不饒的精神。我確信, 經過了這兩年的訓練,以後不管面對什麼問題,都能夠自己找出解決方法,並且有計 畫的完成每一件事情。 首先呢,我要感謝我的指導教授,張仲儒教授。在這兩年期間,老師很有耐心的 教導我,不管是課業上,或是人生態度上,都給了我很好的建議以及指導。這對我以 後的人生有相當大的幫助。當然,老師本人的行為舉止也是相當好的,這提供了我們 一個學習的典範。 其次,是義昇學長。他給了我相當多知識上的指導,以及如何完成論文,他更能 針對我們論文的可行性給予指導,使我們不至於有白做功的情形。再來是家慶學長, 不管是哪方面的數學式子,遇到了不了解的地方,找他準沒錯,是一個相當直得信賴 的學長。還有,立峰學長。他是一個很熱心的學長,替學弟妹解答疑惑時,也都相當 有耐心。當然,詠翰學長,他幫我們釐清了不少 WLAN 的問題。芳慶學長對於我的論文, 也給了不少建議。界和學長,他為我們樹立新好男人的典範。 再來,是陪我一起唸書寫論文的同學。宗軒,志明,朕逢,立忠,他們都是不錯 的同學,修課時可以互相討論,寫論文時可以互相打氣,不想唸書的時候也都會一起 運動及玩樂,這些都減輕了不少作論文時的壓力。 當然,學長姐,青毓,同昊,崇禎,皓棠,俊憲,文祥,以及學弟妹琴雅,家源, 煖玉,俊帆,JB。跟他們在實驗室一起生活的時候,他們帶給了我們歡樂,也使得實 驗室的氣氛和樂融融。尤其是崇禎,皓棠,俊憲,給了我不少選課上的建議。 在我唸研究所這兩年,陪伴著我的是女朋友敏文。真多虧了他的包容與體貼,讓 我能夠放心的把精力放在論文上面,當然我受挫折的時候他會幫我打氣,而有所表現 時他也能和我一起分享喜悅,希望我日後的表現也不會讓他失望。 最重要的,當然是我的家人,我父母,以及我哥哥。有了他們才有今天的我,有 了他們的養育以及教導,我今日才有機會能在交大學習。我認為目前我沒辜負他們的 期望,也期望他們以後能繼續以有我這個兒子及弟弟為榮。. 張凱元 謹誌 民國九十四年. 5.
(6) Contents 中文摘要 ..............................................................................................................................3 Abstract ...............................................................................................................................4 誌謝......................................................................................................................................5 Contents................................................................................................................................i List of Figures.....................................................................................................................iii List of Tables .......................................................................................................................v Chapter 1 Introduction .......................................................................................................1 Chapter 2 SIR and Link-Gain Prediction-Based Power Control Scheme with PRNN/ERLS Predictor .............................................................................................................................................4 2.1 Introduction.................................................................................................................4 2.2 SIR Prediction-Based PC Scheme................................................................................7 2.3 Link-Gain Prediction-Based PC Scheme......................................................................9 2.4 PRNN with ERLS Predictor ...................................................................................... 11 2.4.1 PRNN ............................................................................................................... 12 2.4.2 ERLS ................................................................................................................ 15 2.4.3 The Virtue of ERLS........................................................................................... 16 2.5 Conclusion ................................................................................................................ 17 Chapter 3 Channel Fading Prediction-Based Power Control Method............................ 19 3.1 Introduction............................................................................................................... 19 3.2 System Model............................................................................................................ 20 3.3 Channel Fading Prediction-Based PC Method with PRNN/ERLS Predictor............... 22 3.4 Simulation Results and Discussions........................................................................... 24 3.5 Conclusions............................................................................................................... 33 Chapter 4 Mobile-Assisted and Channel-Fading-Prediction-Based Power Control Scheme ................................................................................................................. 35 4.1 Introduction............................................................................................................... 35 4.2 Mobile-Assisted and Channel-Fading-Prediction-Based PC schemes......................... 36 4.2.1 Mobile-Assisted and Channel-Fading-Prediction-Based PC scheme 1 ............... 36 4.2.2 Mobile-Assisted and Channel-Fading-Prediction-Based PC scheme 2 ............... 38 i.
(7) 4.3 Simulation Results and Discussions........................................................................... 39 4.4 Conclusions............................................................................................................... 51 Chapter 5 Conclusion........................................................................................................ 52 Bibliography...................................................................................................................... 55. ii.
(8) List of Figures Figure 2.1: The SIR prediction-based PC scheme ..................................................................8 Figure 2.2: Link-Gain prediction-based PC scheme............................................................. 10 Figure 2.3: Prediction process of the nonlinear predictor. .................................................... 12 Figure 2.4: Pipelined recurrent neural network .................................................................... 12 Figure 2.5: Detailed construction of level i of the PRNN ..................................................... 13 Figure 2.6: The cost versus weight ...................................................................................... 17 Figure 3.1: The burst error channel model for the PC command .......................................... 22 Figure 3.2: Channel-fading-prediction-based PC method with PRNN/ERLS ....................... 23 Figure 3.3: The Ep of the three power control schemes ........................................................ 26 Figure 3.4: The outage probability of the three power control schemes................................ 27 Figure 3.5: The outage probability of the CFP PC method................................................... 27 Figure 3.6: The outage probability of the LGP PC scheme................................................... 28 Figure 3.7: The outage probability of the SIRP PC scheme ................................................ 28 Figure 3.8: The outage probability of the three power control schemes .............................. 29 Figure 3.9: The outage probability of the CFP PC method in error-prone model .................. 31 Figure 3.10: The outage probability of the LGP PC scheme in error-prone model................ 31 Figure 3.11: The outage probability of the SIRP PC scheme in error-prone model............... 32 Figure 3.12: The outage probability of the three schemes in burst error channel model (Pe=0.01 and k=5)........................................................................................................ 33 Figure 4.1: The MA CFP PC scheme 1 ................................................................................ 37 Figure 4.2: The MA CFP PC scheme 2 ................................................................................ 38 Figure 4.3: The outage probability of the MA PC schemes 1 when fmTP is 0.01 (k=0, Pe=0.00) ...................................................................................................................... 40 Figure 4.4: The outage probability of the MA PC schemes 1 when fmTP is 0.05 (k=0, Pe=0.00) ...................................................................................................................... 41 Figure 4.5: The outage probability of the MA PC schemes 1 when fmTP is 0.1 (k=0, Pe=0.00) ...................................................................................................................... 41 Figure 4.6: The outage probabilities of the prediction-based PC schemes without and with the MA PC method 1 in error-free channel (Pe=0.00, k=0) ................................... 42 Figure 4.7: The outage probabilities of the prediction-based PC schemes with MA PC method 1 and with the MA PC method 2 in error-free channel (Pe=0.00, k=0) ........... 43 Figure 4.8: The outage probabilities of the prediction-based PC schemes without and with the MA PC method 1 in error-prone channel (Pe=0.05, k=1) ................................ 44 Figure 4.9: The outage probabilities of the prediction-based PC schemes with the MA PC method 1 and with the MA PC method 2 in error-prone channel (Pe=0.05, iii.
(9) k=1)............................................................................................................................. 44 Figure 4.10: The outage probabilities of the PC schemes with the MA PC method 1 ........... 45 Figure 4.11: The outage probabilities of the PC schemes with the MA PC method 2............ 46 Figure 4.12: The outage probabilities of the PC schemes without MA PC method and with the MA PC method 1 in error-free channel (Pe=0.00, k=0) ................................... 47 Figure 4.13: The outage probabilities of the PC schemes without MA PC method and with the MA PC method 1 in error-free channel (Pe=0.05, k=1) ................................. 48 Figure 4.14: The outage probabilities of the prediction-based PC schemes with the MA PC method 1 and method 2 in error-free channel (Pe=0.00, k=0) ......................... 49 Figure 4.15: The outage probabilities of the prediction-based PC schemes with the MA PC method 1 and method 2 in error-free channel (Pe=0.05, k=1)........................... 50. iv.
(10) List of Tables Table 2.1: Size and remark of matrixes for ERLS ................................................................ 16 Table 3.1: The parameters of the simulation environment .................................................... 25 Table 4.1: The desired levels of the PC schemes in error-free channel ................................. 47 Table 4.2: The desired levels of the PC schemes in error-prone channel .............................. 48. v.
(11) Chapter 1 Introduction. W. ith the advance of wireless communication technology, there is an explosive increase in the demand of mobile equipments. In second-generation (2G). wireless systems, although there are many countries adopted the global system for mobile communication (GSM) and IS-95, the high-rate data in high-user-density is still not able to be supported. However, in the third-generation (3G) wireless communication systems, these are no longer the problems. In 3G wireless communication systems, better quality of service (QoS) and larger number of traffic types can be supported. Unlike the 2G wireless communication systems, which adopts the time-division multiple access technology [1], a popular multiple access technology used in the 3G wireless communication is the code-division multiple access (CDMA). The CDMA is quite different from the TDMA and frequency-division multiple access (FDMA), whose capacities are limited by the time slot and bandwidth, respectively, the capacity of CDMA system is interference limited. Thus, any reduction of the interference will directly increase the system capacity. In the CDMA systems, before the data are transmitted, each user multiplies its data with its own pseudo random sequence, and then transmits it. At the receiver, the received signal multiplies the pseudo random sequence for each user, and the data is obtained [2]. In addition, in the 3G wireless communication systems, in order to support many traffic types, such as voice, data, or video, which require different transmission rate, different rates of pseudo sequences can be used for different traffic type. Each user has its own pseudo random (pseudo noise) sequence, and different pseudo noise (PN) sequences are almost orthogonal to each other; therefore, theoretically, the behavior of the interference to other mobile stations is just like a pseudo noise. In the CDMA systems, the interference from a particular user is much less than that in the TDMA and FDMA systems, so the CDMA can support significant system 1.
(12) capacity improvement in 3G wireless cellular systems [1]. However, the improvement is greatly dependent on the effectiveness of power control scheme used, especially on the uplink power control. If the power control does not work very well, the strengths of the transmission signals received by the base station, which are geographically related, might be quite different. This is the near-far problem existed in the CDMA systems. Other factors such as path loss, shadowing, multi-path, and interference will also influence the signal-to-noise-ratio (SIR) of the transmitted signal and therefore the quality of service (QoS). Hence, a good power control scheme is needed in the CDMA cellular systems to improve the QoS and increase the system capacity. In this thesis, we propose a new power control scheme, called mobile-assisted and channel fading prediction-based (MA-CFP) power control scheme, which is composed of two power control methods. One is the channel fading prediction-based power control method, which can remove the effect of the adjustment of transmission power at the prediction, and the other is the mobile-assisted power control method, which can eliminate the effect of power control error and prediction error. The thesis is organized as follows. In the beginning of Chapter 2, it is an overview of the power control schemes, mainly focused on the SIR prediction-based [3-7] and link-gain prediction-based power control scheme [8], and the environment of the WCDMA cellular system. Next, we introduce the pipeline recurrent neuron network with extended recursive least square predictor [9], which can be used in the prediction-based power control scheme. It performs well for the signals which have the properties of nonstationary and nonlinearity. It is very suitable for the wireless environment and can avoid unnecessary adjustments of the weightings in neurons; consequently, reduce the prediction error is decreased. However, in the SIR and link-gain prediction-based power control scheme, there are still some problems of the prediction. The prediction will be misled by the adjustment of transmission power; therefore, we propose a channel fading prediction-based PC method to improve the prediction in the link-gain prediction-based power control schemes. In Chapter 3,. 2.
(13) the detail of the channel fading prediction-based power control scheme is shown and there are also some simulation results and discussions. Although the link-gain prediction-based power control scheme [8] was proposed to eliminate the effect of transmission power on the prediction error, however, the effect was not eliminated completely. Therefore, the channel fading prediction-based power control scheme is proposed to overcome this problem. In the channel fading prediction-based power control scheme, not only the transmission power of the mobile station itself but also the interference from other mobile stations are excluded from the predictor, so the prediction error will not be from the adjustment of the transmission power. In addition, the interference is composed of the powers after the power control, and it is very difficult to predict the interference. Therefore, the prediction can be more precise than that in link-gain or SIR prediction-based power control scheme. In many researches, the performances of the power control schemes are in error-free channel, that is, the power control command sent from the base station can be correctly received. However, this is not realistic; therefore, we also simulate these power control schemes in error-prone channel. Consequently, the performance degrades apparently. To overcome the effect of power control command error, we propose the mobile-assisted and channel-fading prediction-based power control scheme in chapter 4. In Chapter 4, the mobile-assisted and channel-fading prediction-based power control scheme is introduced to overcome the effect when the power control command is in error-prone channels. When the power control command is incorrect, not only the transmission power but also the prediction will be influenced, and then, the performance degrades. Therefore, with this scheme, the mobile station adjusts the transmission power, considering not only the power control command but also the slope of channel fading. The effect of the incorrect power control command, which might come from prediction error or power control command error, can thus be reduced. Finally, we will make some conclusions for this thesis in Chapter 5.. 3.
(14) Chapter 2 SIR and Link-Gain Prediction-Based Power Control Scheme with PRNN/ERLS Predictor. T. his chapter concentrates on the paper review of power control (PC) schemes, and mainly focused on the SIR prediction-based PC scheme and link-gain. prediction-based PC scheme. They will be compared with the mobile-assisted and channel-fading-prediction-based PC scheme studied in this thesis.. 2.1 Introduction The third generation wideband code division multiple access (WCDMA) cellular mobile system is designed for multimedia services such as voice, video, WWW, and ftp. When transmitting these services, all the quality of service (QoS) requirements of the traffics should be satisfied. In the uplink, which is the transmission from the mobile station to the base station, the data may be suffered from factors such as the multi-path, shadowing, and near/far effect. These factors affect the signal to interference ratio (SIR) value received at the base station; therefore, every mobile station need to adjust its transmission power to keep the SIR of the received signal at the base station kept near at a level which QoS requirement can still be maintained. There are many PC techniques in direct sequence (DS)/CDMA systems and they can be classified in many different categories. For example, centralized and distributed PC scheme. A centralized PC scheme is assumed that all information of the gain between the mobile stations 4.
(15) and base stations are known, so the transmission power of the mobile stations can be well controlled to meet the carrier-to-interference (CIR) balancing [10]. The concept of CIR-balancing is introduced by Aein [11] first, in which all receivers experience the same CIR. The distributed PC scheme is also called decentralized PC scheme. The distributed PC scheme [12-14] adopts only one mobile station’s power, and the algorithm only depends on the local information, such as measured SIR or the estimated of the channel fading from mobile station and base station. Although the performance of centralized PC scheme is better than the distributed one, the distributed PC scheme is more practical, because the distributed PC scheme only uses the local information. Both the closed-loop and outer-loop PC scheme belong to the distributed PC scheme. The outer-loop PC scheme always combines with the SIR-based power control. This is because that in the strength-based PC scheme, the target threshold is always fixed and there is no corresponding outer-loop PC scheme. The outer-loop use can adoptively change the target SIR threshold such that the service requirement, such as the average bit error rate (BER), can be maintained at a certain level [15]. Noticeably, the target SIR threshold does not corresponding to a particular BER. This is because the SIR measured is not always the same with the SIR threshold, and variance of the measured SIR is influenced by the channel fading and mobile station’s velocity. Therefore, identical target SIR threshold can not guarantee the SIR measured, as well as the BER. Moreover, the SIR requirements of different mobile stations are not the same, and it is useful to adopt the outer-loop PC scheme in the multi-traffic-type systems. There are already many algorithms [16-19] proposed for updating the target SIR threshold to satisfy the BER. Another the PC method, which is usually adopted in the wideband CDMA cellular systems for uplinks, is the close-loop PC scheme.. In this closed-loop PC scheme [3], [20], the base station periodically measures the average received signal strength (strength-based) or SIR (SIR-based) and compares it with a threshold. Based on of the comparison result, the base. 5.
(16) station sends a PC command to the mobile station, and the mobile station adjusts its transmission power up or down according to the received PC command. However, there is a loop delay existed in such conventional closed-loop PC schemes. It is inappropriate to adjust the transmission power at the present cycle by using the PC command produced at the last cycle. Therefore, many researches investigated the performance of prediction-based close-loop SIR PC schemes for uplinks in CDMA cellular networks. In [4], a fixed-step method and a variable-step method were studied; a fuzzy method was proposed in [5] and [6]; the pulse-code modulation [3] and a grey method [7] were also investigated. Predictor is also an important topic in prediction-based PC scheme. Recently, many researches investigate the performance of channel prediction in wireless environment by using learning algorithms such recursive least squares (RLS) [21], and gradient descent (GD) method [22] [23] in pipelined recurrent neural network (PRNN). The analysis of [23] shows that the performance of PRNN with GD learning algorithm is better than RLS. There is another learning algorithm extended recursive least square (ERLS) proposed. The performance of PRNN with ERLS was analyzed by Baltersee and Chanbers [24], and it is indeed better than PRNN with GD for speech signal. The difference between the ERLS and GD learning algorithm is the cost function. The ERLS consider not only the prediction errors of all modules at present cycle but also that the error at past cycles; however, the cost function of GD only considers present errors of for the modules. Therefore, the ERLS algorithm can determine the weights in the PRNN not from step-by-step adjustments and can avoid unnecessary trend of weight to increase the precision of prediction. In this thesis, we use the PRNN with extended recursive least square (ERLS) as the predictor for all kinds of prediction-based PC schemes. The prediction objective of these schemes [4-7] is SIR. The idea of these SIR prediction-based (SIRP) PC schemes is to predict the received SIR value at the base station. It is very intuitional to use the SIRP PC scheme, because it is the evolution of the non-predicted SIR PC scheme and simply adds a predictor inside. However, the received SIR value varies not. 6.
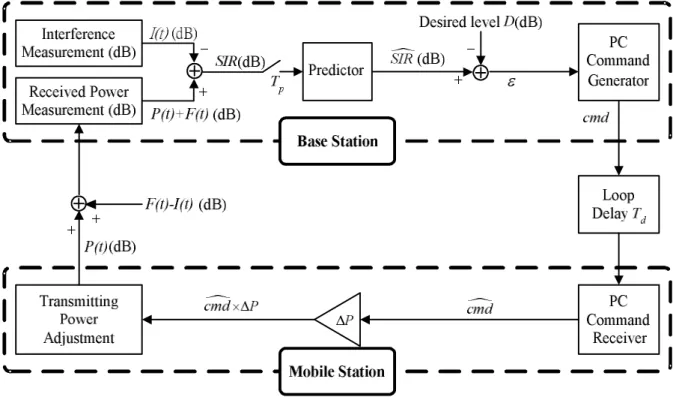
(17) only with the channel fading and interference, but also the transmission power. From this point of view, the result of prediction will be influenced by the transmission power from the mobile station, and some prediction error would be incurred due to the adjustment of transmission power. Therefore, a link-gain prediction-based (LGP) PC scheme was proposed [8], where the mentioned. link-gain. consists. of channel. fading. and. interference.. The. link-gain. prediction-based power control scheme is designed to remove the disturbance of the power control adjustment itself.. Since the adjustment of transmission power will not result in the. prediction error, the prediction is more precise than that in SIR prediction-based PC scheme. The remainder of this chapter is organized as follows. In section 2.2, we will show you the PRNN and ERLS learning algorithm in detail. In section 2.3, we will show you the SIR prediction-based PC scheme. In section 2.4, the link-gain prediction-based PC scheme is also shown.. 2.2 SIR Prediction-Based PC Scheme In the power control loop, originally, there is no predictor in the PC loop. At the base station, it compares the SIR of the received signal at the last PC cycle with the desired SIR level, and then produces the PC command. However, there is a loop delay in the closed-loop, so it is not appropriate to decide the PC command by using the SIR received at the last control cycle. In order to compensate the effect of loop delay, the predictor is added into the PC loop. Therefore, the most common prediction-based PC scheme is the SIR prediction-based PC scheme. Just as shown in follows. Differing from the conventional PC loop, there is a predictor in the SIR prediction-based PC loop to compensate the effect of loop delay as shown in Fig. 2.1. The mobile station updates its transmission power F(t) every update period Tp seconds. At the base station, the signal power received is P(t) × F(t), where F(t) is the channel fading, and the interference measured is I(t), and the measurement are assumed perfect. The SIR then is fed into the PRNN/ERLS predictor by setting Tp=Td. and the PRNN/ERLS predictor will produce a one-step value SIR. 7.
(18) Figure 2.1: The SIR prediction-based PC scheme with the desired SIR level D, and an error ε is obtained. When ε is larger Comparing SIR than zero, it means that the SIR at the next cycle is very likely larger than D, therefore, the power control command cmd is set to be − 1; otherwise, it is set to be +1. The base station sends this cmd to the mobile at each update period. The mobile detects the command as cmd dB. and adjusts the transmission power by an amount of ∆P × cmd Fig. 2.1 only shows the basic SIR prediction-based PC scheme, and there are many modified SIR prediction-based PC scheme, such as the variable-step method [4]. In the variable-step method, it requires more bits for the cmd produced by the base station, and the mobile station adjusts its transmission power no longer by a fixed-step size, but is a variable-step size according to the received cmd. Deservedly, the variable-step method can perform better than the fixed-step method. This is because the mobile station can use larger-size adjustment of the transmission power to compensate the effect of the short-term fading. The fuzzy method [5] [6] and PCM [20] method are also this kind of PC method which use different algorithms to decide the cmd. However, the variable-step method takes more redundancy on the PC command. 8.
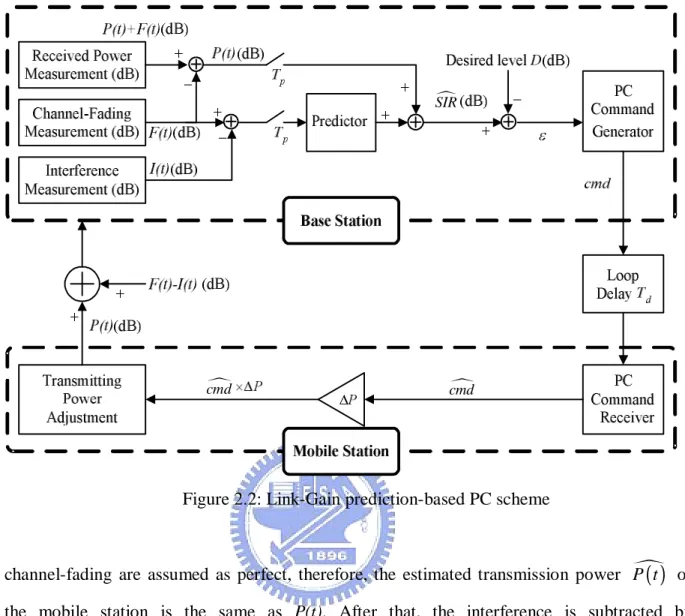
(19) It is also a method to improve the PC performance by choosing the appropriate predictor which can predict more precisely [7] [8]. In [7], it uses the grey method as its predictor because we only can obtain a part of information of the environment; therefore, only a less information is needed by using grey method. In [8] the PRNN with ERLS predictor is used because of the nonstationary and nonlinear characteristic of the signal in wireless channel. It is shown in [8] that the PRNN with ERLS predictor outperforms than the grey method, therefore the PRNN with ERLS predictor is adopted in the thesis.. 2.3 Link-Gain Prediction-Based PC Scheme It is very intuitional to use the SIR prediction-based PC scheme because it is evolved from the conventional SIR PC scheme. However, as shown in [8], because the transmission power is one factor of SIR, the prediction will be misled by the adjustment of transmission power. For example, while the link-gain, which is defined as the composition of channel fading and interference, decreases, the power control generator sends a PC command to tell the mobile station to increase the transmission power. The received SIR will increase consequently, but the predictor will think that the link-gain rises up. As a result, it will send a PC command to tell the mobile station to decrease the transmission power at the next control cycle. However, the link-gain goes worse actually, and the outage is very likely occurring. In this case, the power control would perform poor. Therefore, in the link-gain prediction-based PC scheme [8], the transmission power is excluded from the input of the predictor to eliminate the effect on the prediction. The link-gain prediction-based PC scheme is shown as follow. Figure 2.2 shows the link-gain prediction-based PC scheme with PRNN/ERLS predictor. As shown in this figure, the mobile station also update its transmission power P(t) every Tp seconds. The signal power received at the base station is P(t) × F(t), where F(t) is the channel-fading which is modeled in system model. The base station not only measures the signal power and the interference for a certain user, but also the channel-fading according by the common pilot channel. In [8], the measurement of received power, interference, and. 9.
(20) −. SIR. −. −. cmd. cmd. Figure 2.2: Link-Gain prediction-based PC scheme channel-fading are assumed as perfect, therefore, the estimated transmission power P ( t ) of the mobile station is the same as P(t). After that, the interference is subtracted by channel-fading in dB domain and the result is fed into the PRNN/ERLS predictor for the prediction at the next cycle. After the prediction process, the output of predictor adds the transmission power P ( t ) and the predicted received SIR obtain. The base station compares with the desired SIR level D, and an error ε is obtained. When ε is larger than zero, SIR this implies that the SIR at the next cycle is very likely greater than the desired level D, therefore, the power control command cmd is set to be − 1; otherwise, it is set to be +1. The base station sends this cmd to the mobile at each PC cycle. The mobile detects the command as and adjusts the transmission power by an amount of ∆P × cmd dB. cmd In the link-gain prediction-based PC scheme, the prediction will not be misled by the transmission power because the transmission power is excluded from the predictor. Therefore, the prediction is more precise no matter what kind of predictor is used. Restate that the 10.
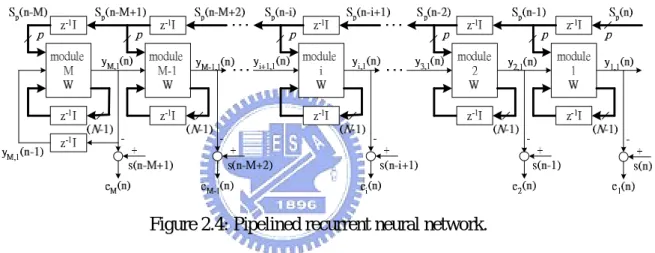
(21) link-gain mentioned consists of channel-fading and interference. However, there is an assumption in this scheme, just as shown in [8], that the base station obtains the information of channel-fading from the pilot signal, which is used to measure the downlink channel fading. That is, as long as in the reciprocal channel, this PC scheme works. And all the PC schemes in this thesis are assumed in the reciprocal channel, too.. 2.4 PRNN with ERLS Predictor In the wireless environment, there are two characteristic of the transmission signal: non-linear and non-stationary. The SIR through the air interfaces measured from the base station or mobile station also exhibits these two characteristics. For a nonlinear prediction of non-stationary signals, the neural network is quite suitable to learn from the environment because that the distributed non-linearity is built into this network. There are many learning algorithms can be used for the weights in neural network. However, some traditional algorithm is not suitable because that they are not able to learn the environment behavior fast enough to support real-time traffic. What we need is an algorithm which can learn in an on-line fashion, that is, the network can adapt the statistical variations of incoming information and process an output value at the same time by using that algorithm. Haykin and Li [9] proposed an unusual, computationally efficient nonlinear predictor by using the pipelined recurrent neural network (PRNN). The extended recursive least squares (ERLS) learning algorithm, which not only use the present but also previous prediction errors, is used for the weights in the PRNN. A simple structure of PRNN with ERLS predictor is shown as Fig 2.3. No matter the input signal s(n-1) is SIR, channel-fading, or other signals, this structure in Fig 2.3 always can be used to manufactory an one-step prediction, s ( n ) . The ERLS learning algorithm is applied for each neural in PRNN to adopt the environment.. 11.
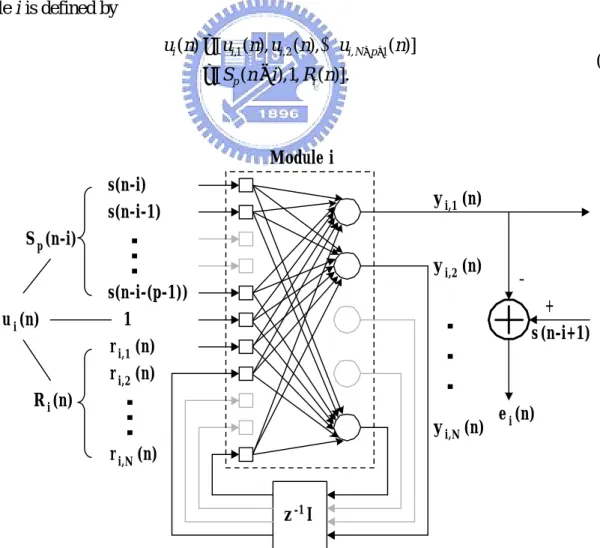
(22) input signal. Level. Level. Level. one-step forward prediction of input signal. s(n-1). M. i. 1. sˆ(n). PRNN with ERLS. Figure 2.3: Prediction process of the nonlinear predictor.. 2.4.1 PRNN. Figure 2.4: Pipelined recurrent neural network.. Figure 2.4 shows the pipelined recurrent neural network (PRNN). In PRNN, there are total M levels of small-scale recurrent neural network (RNN) modules, which are shown in Fig. 2.5. Every RNN module is just like a dynamical sub-model of the outside world. It linearly combine the inputs and then manufactory the outputs for each neuron. Also, there are feedbacks in each module, that is, many outputs of the neurons are put into its input. Figure 2.5 shows the structure of ith module in detail. No matter the outputs is hidden or not, they are all fed back to the input of the network; therefore, this kind of neural network is also called a fully connected network. Because some outputs of the neural are fed back, the network can capture all the information previous. The input signals of each module are composed of external signal, feedback signal and bias. There are p external inputs, which are previous signals and they are defined by 12.
(23) S p (n − i ) = [ s (n − i ), s (n − i − 1), , s (n − i − ( p − 1))]T .. (2.1). In addition, there are total N feedback inputs, they are the output of each neuron in the RNN, and defined by Ri (n) = [ri ,1 (n), ri ,2 (n), , ri , N (n)]T [ yi +1,1 (n − 1), yi ,2 (n − 1), , yi , N (n − 1)]T = T [ yi ,1 (n − 1), yi ,2 (n − 1), , yi , N (n − 1)]. for 1 ≤ i ≤ M − 1 for i = M .. (2.2). Besides the above p+N, in order to support a bias for each neuron, there is an additional input used to achieve this by set the value to be +1 always. There are N-1 outputs of each module fed back to its own input and the remainder output is applied directly into the next module as the input (2.2). As to the Mth module, the first output is delayed for one-step and then fed back to its own input instead of the bias input. Therefore, all the modules are very similar in that they have the same number of external input, feedback input, and bias signal. All the inputs of module i is defined by ui (n) = [ui ,1 (n), ui ,2 (n), ui , N + p +1 (n)]. (2.3). = [ S p (n − i ),1, Ri (n)].. Module i s(n-i) s(n-i-1). s(n-i-(p-1)) 1 r i,1 (n) r i,2 (n). .... R i (n). y i,2 (n). + s (n-i+1). . . .. u i (n). .... S p (n-i). y i,1 (n). y i,N (n). e i (n). r i,N (n) z -1 I. Figure 2.5: Detailed construction of level i of the PRNN. 13.
(24) Furthermore, in the PRNN, the weights in all the modules are designed to have the same value, so the complexity is decreased greatly. Different module is used as the predictor at different time, and therefore, the prediction errors at different time can be obtained. The activation function of each neuron in every module is typically a monotonically increasing sigmoid logistic function, and the output is restricted within one and zero. It is given by. yi , k ( n) = Φ (vi , k (n)) =. 1 , 1 + exp(−vi ,k (n)). i = 1, , M ,. (2.4). k = 1, , N ,. where vi,k(n) is the net internal activation of the kth neuron, and yi,k(n) is the output of the kth neuron; both vi,k(n) and yi,k(n) are refer to the ith module and at nth time. The internal activation of the kth neuron of the ith module is given as follows, p. N +1+ p. l =1. l = N +2. vi ,k (n) = ∑ wk ,l s (n − i − (l − 1)) + wk , p +1 + i = 1, , M ,. ∑. wk ,l ri ,l − ( p +1) (n),. (2.5). k = 1, , N ,. where wk,l the weight for lth input to kth neuron. Therefore, the weight wk,p+1 represents the adjustment of the bias input. Restate again, the weights of neurons are the same in every module. In the PRNN, the behavior of each module is a sub-predictor and has an output, which is defined by yi,1(n). Therefore, the prediction error in each level is as follows,. ei (n) = s(n − i + 1) − yi ,1 (n) .. (2.6). In the adaptive filter, the prediction error is used for updating the weights; the prediction of the PRNN at time n is defined by the output of the first neuron of 1th module, and the value is given by yfilt ( n) = y1,1 (n ) ,. (2.7). and this value corresponds to the prediction value sˆ(n) shown in Fig. 2.3. In the wireless environment, it is necessary to make the PRNN able to predict the non-stationary channel fading; therefore, the ERLS learning algorithm is used.. 14.
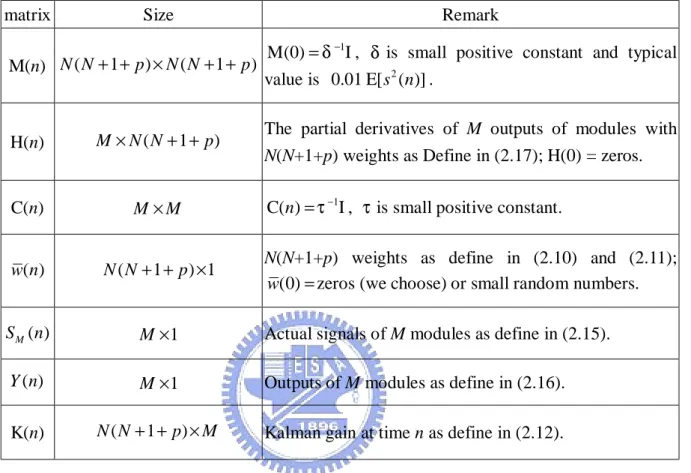
(25) 2.4.2 ERLS There are already some algorithms can be used for adaptive filter, for example, Haykin and Li [9] proposed a gradient descent (GD) for the PRNN. Later, Baltersee and Chamber [24] also provided the extended recursive least square (ERLS) for the weights in PRNN to learn and it was also shown that ERLS performs better than GD. The ERLS learning algorithm was derived from the extended Kalman filter (EKF) algorithm [25]. Through analysis of the EKF, the cost function of the ERLS is correlated by not only the present but also the previous prediction errors. Therefore, the cost function is given by n. ε ERLS (n) = ∑ ξ n − k E (k ) ,. (2.8). k =1. where E(k) is the prediction errors of M modules, which is defined by M. E ( n) = ∑ ξ i −1ei2 (n) ,. (2.9). i =1. moreover, the constant ξ ∈ (0,1] represents a forgetting factor in the cost function (2.8) according the RLS strategy and it can make the learning algorithm suitable for the prediction of the non-stationary signals. The weights of the PRNN are updated adaptively by minimizing the cost function (2.8). According to the analysis of [24], the weight matrix, denoted by W(n), is rearranged as follows, w(n) = [ w1 (n), w2 (n), , wN (n)]T , and wi (n) = [ wi ,1 (n), wi ,2 (n), , wi , N + p +1 (n)]. (2.10). for i = 1, , N .. (2.11). where wi , j (n) represent the weight of jth input to ith neuron. The learning algorithm is shown as follows, K(n) = M(n − 1)HT (n) ⋅ [ξ C(n) + H(n)M(n − 1)HT (n)]−1 ,. (2.12). w(n) = w(n − 1) + K(n)[ S M (n) − Y (n − 1)] ,. (2.13). and M(n) = ξ −1[I − K(n)H(n)]M(n − 1) ,. (2.14). where the observed signal, S M (n) , equals to [s (n), s (n − 1), , s (n − M + 1)]T ,. (2.15). and the output signal, Y (n) , equals to [ y1,1 (n), y2,1 (n), , yM ,1 (n)]T ,. (2.16). 15.
(26) in addition, the instantaneous gradients, H(n) , is given by. ∂Y (n − 1) . ∂w(n − 1). (2.17). The equations from (2.12) to (2.14) are operations of matrix, and the sizes, meanings and initial values are listed in Table 2.1 matrix. Size. Remark. M(0) = δ −1I , δ is small positive constant and typical M(n) N ( N + 1 + p ) × N ( N + 1 + p ) value is 0.01 E[ s 2 (n)] . The partial derivatives of M outputs of modules with N(N+1+p) weights as Define in (2.17); H(0) = zeros.. H(n). M × N ( N + 1 + p). C(n). M ×M. w(n). N ( N + 1 + p) ×1. S M ( n). M ×1. Actual signals of M modules as define in (2.15).. Y ( n). M ×1. Outputs of M modules as define in (2.16).. K(n). N ( N + 1 + p) × M. Kalman gain at time n as define in (2.12).. C(n) = τ −1I , τ is small positive constant. N(N+1+p) weights as define in (2.10) and (2.11); w(0) = zeros (we choose) or small random numbers.. Table 2.1: Size and remark of matrixes for ERLS. 2.4.3 The Virtues of ERLS The cost function of GD is based only on prediction errors from all modules at time n. On the contrary, the cost function of ERLS is based not only on the errors at time n but also previous errors. For this reason, the ERLS can avoid unnecessary adjustment of weight update. The following is an example to explain this phenomenon. Assume that the signal is 3 then 4 recurrently {3, 4, 3, 4…}, and the predictor uses the tapped-delay-line with window 1 to predict. The weight matrix includes only an element thus. When the input signal is 3, the best weight is 1.33; on the other hand, when the input signal is 4, the best weight is 0.75. The cost function of GD can be define as. 16.
(27) E ( n) = e 2 ( n) ,. (2.18). where the term e(n) is the prediction error.. E(n). signal: 4. 0.75. 12. signal: 3. 1.33. 12.5. w. Figure2.6: The cost versus weight.. Fig. 2.6 shows the cost function of different weights with different inputs. The weight adjustment of GD is based on negative gradient. When the input is 4, because the previous input is 3, the weight will be amended to approach 1.33 and it will be used to predict next signal. It must be noticed that the best weight is 0.75 for input 4 to predict 3. On the contrary, when the input is 3, the weight will approach 0.75, but the best weight is 1.33. Therefore, when the weight lines in 0.75 and 1.33, it will tremble and does not have a stable value, especially for large learning-rate parameter. However, if this parameter is set small to reduce tremble, it will converge slowly. On the other hand, when the RLS with forget factor 1 (the same as Wiener filter) is adopted, because it is not only based on now error but also previous errors, it can consider 0.75 and 1.33 to determine the weight 12/12.5 whether the signal is 3 or 4. Hence, RLS can avoid unnecessary adjustment of weight update. When the signal is non-stationary, the forget factor can be set less than 1 to emphasize present error. The ERLS is similar to RLS and its performance is better than GD. Because the PRNN adopts ERLS and considers previous signal, it doesn’t need the linear subsection (RLS) to linearly predict, but maintain about the same performance.. 2.5 Conclusion In the beginning of this chapter, the structure of the pipeline recurrent neural network (PRNN) is shown in detail and the extended recursive least squares (ERLS) learning algorithm 17.
(28) also presented. PRNN is quite suitable to learn from the environment because that the distributed non-linearity is built into its design. ERLS consider not only the present but also the past errors of all the modules in PRNN; therefore, ERLS consider not only the prediction errors of all modules at present cycle but also that at the past cycles , and can avoid unnecessary tremble of weight to improve the performance of prediction. Then, the system model, which includes the traffic model, the propagation model, the SIR model, and the burst error model of the PC command, is also shown in this chapter. Next, the basic SIR prediction-based PC loop is shown and a few modified SIR prediction-based PC scheme are introduced. The link-gain prediction PC scheme, which is shown at the last part in this chapter, can eliminate the effect of the adjustment of transmission power on the prediction and is proposed to improve the performance of the SIR one. Actually, the interference, which is still fed into the predictor in the link-gain prediction-based PC scheme, is composed of the transmission powers from other mobile stations after the PC. There must still some degree of prediction error resulted from the adjustment of transmission power in the link-gain prediction-based PC scheme. Therefore, the channel fading prediction-based PC method in the MA-CFP PC scheme is used to get rid of the problem above completely.. 18.
(29) Chapter 3 Channel Fading Prediction-Based Power Control Method. 3.1 Introduction. F. rom the last chapter, we have seen the architecture of the closed-loop PC. Two prediction-based power control schemes are introduced. In the SIR prediction-based. PC scheme, the prediction is misled by the adjustment of transmission power of the mobile station itself, so another prediction-based PC scheme, link-gain prediction-based PC scheme, was proposed. In the link-gain prediction-based PC scheme, the transmission power of the mobile station is excluded from the input of the prediction; therefore, the adjustment will not influence the prediction. Although it claims that the predication error in the link-gain prediction-based PC scheme is not resulted from the transmission power of the mobile station by excluding the transmission power from the input of the predictor, however, the interference is composed of the transmission powers from other mobile stations; therefore, there must be still some level of prediction error influenced by the transmission powers of the mobile stations. Therefore, the channel fading prediction-based (CFP) PC method is used to completely discard the disturbance of the adjustment of transmission power. In the CFP PC method, not only the transmission power but also the interference is banished from the input of the predictor. The objective of prediction left is the channel fading only, and the influence of adjustment of transmission power on the prediction error can therefore be eliminated completely. The interference is composed of the transmission powers of the mobile station after compensating 19.
(30) the channel fading, so the correlation of interference is much smaller than that of the channel fading. Actually, it is very difficult to predict an independent process such as the interference, so the effect of not predicting the interference is quite little. The remainder of this chapter is organized as follows. In section 3.2, the system model used in this thesis is defined. In section 3.3, the channel fading prediction-based PC scheme is proposed by adopting the pipelined recurrent neural network (PRNN) with extended recursive least squares (ERLS) [9] as it predictor. In section 3.4, the simulation results and discussions are shown. Finally, the conclusions are made in section 3.5.. 3.2 System Model The model of channel fading for the WCDMA cellular system is determined by both the long-term fading and the short-term fading, which is presented by. F (t ) = r - a ×10η /10 × ς (t ) ,. (3.1). where r -a ×10η /10 is the long-term fading including path loss and shadowing, r is the distance from the base station to the mobile station, a is the path loss exponent, and η is the normal-distributed random variable with zero mean and variance σ L2 ; The short-term fading, ς (t ) , is caused by the multi-path transmission. The local scatters such as the house, the buildings, and other man-made structures reflect the transmitted signal and this process lead the received signal coming from several reflective paths. The short-term fading is usually modeled by the Rayleigh distribution if the path number is larger enough and there is no line-of-sight signal component. The short-term fading which is time-correlated Rayleigh fading, can be regarded as multiplicative complex Gaussian process with an autocorrelation function R (τ ) given by ∞. R (τ ) = ∫ W ( f ) e j 2π f df −∞. where W ( f. ). (3.2). is the power spectrum density of individual fading Doppler shift components.. In general, W ( f. ). is given by [26] 20.
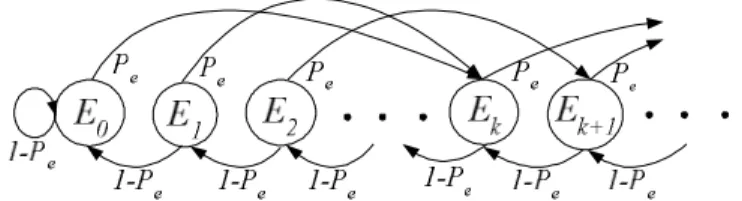
(31) W ( f ) = π 0. σ2 f D2 − f 2. f ≤ fD. .. (3.3). f ≥ fD. Hence, according to mathematical analysis, the autocorrelation function (3.2) can be derived as R (τ ) = σ 2 J 0 ( 2π f Dτ ) ,. (3.4). where σ 2 is the average signal power, J 0 ( ) is the zeroth order Bessel function; f D is the maximum Doppler frequency shift, which usually ranges from 0.01 to 0.1 when normalized by the PC updating rate (1/Tp) for carrier frequency =2000 MHz and Tp =0.667ms (i.e., f DTp -0.01-0.1). Because the short-term fading is not memoryless, the predictor is able to work according to previous information. In order to do the simulations, we generate the short-term fading of each mobile station by the famous Jakes model. As shown in follows: short-term fading for mobile s ς s (t ) = 2σ. 2 M ∑ cos ( 2π f Dt cos ( 2π m L ) + θm,s ) e jβm , L m=1. (3.5). where L=4M+2 is the number of signal path, β m = π m ( M + 1) ;. (3.6). and θ m , s = β m + 2π ms ( M + 1) s=0, 1, 2,…M-1.. (3.7). Since the generated ς s (t ) is mutually independent for different index s, this technique can produce up to M independent short-term fadings. Therefore, we choose M equals to the number of total links in all cells of the system. Because it is reasonable to assume that the scattering geometry is time invariant within some small local area or time frame, we are able to assume further that the parameters of the Jakes model is fixed in each simulation. The SIR (in dB) received at the base station, SIRr, is given by P+F − I (in dB), where P is the transmission power of the mobile station, F is the path loss and fading between the mobile station and the base station, and I is the total interference on the link. The outage probability is regarded as the system performance index, and it is the statistics over all mobile users in the 21.
(32) central cell, defined as Po = Pr {SIRr < SIRo},. (3.8). where SIRo is the minimum SIRr required to achieve a desired bit error rate. Since Eb/N0 = SIRo × PG, where PG is the processing gain, the value of SIRo can be determined by particular PG and minimum Eb/N0 requirement for different service.. Figure 3.1: The burst error channel model for the PC command As for the burst error channel, Fig. 3.1 shows the model of the burst error channel, which is a modified model of that in [27], for the power control command, where state E0 represents the received PC command at mobile station is correct at the present control period; state En, n=1, 2, 3…, represents that the received PC command is with burst error length n, denoting that it will continue to incur error in the next n consecutive control cycle. If the PC command is now at state En, there is a probability Pe that the PC command may incur accumulatively a burst error with k cycles in length and transits to state En+k-1, also there is a probability (1 − Pe ) that the PC command will decrease its burst error length by 1 and moves to En-1. It can be proven that the overall PC command error probability is kPe.. 3.3 Channel Fading Prediction-Based PC Method with PRNN/ERLS Predictor In order to eliminate the effect of the adjustment of the transmission power on the prediction error, we propose the channel fading prediction-based (CFP) PC method in this section. Figure 3.2 shows the channel fading prediction-based (CFP) power control (PC) method. The mobile station updates its transmission power P(t) every update period Tp seconds. At 22.
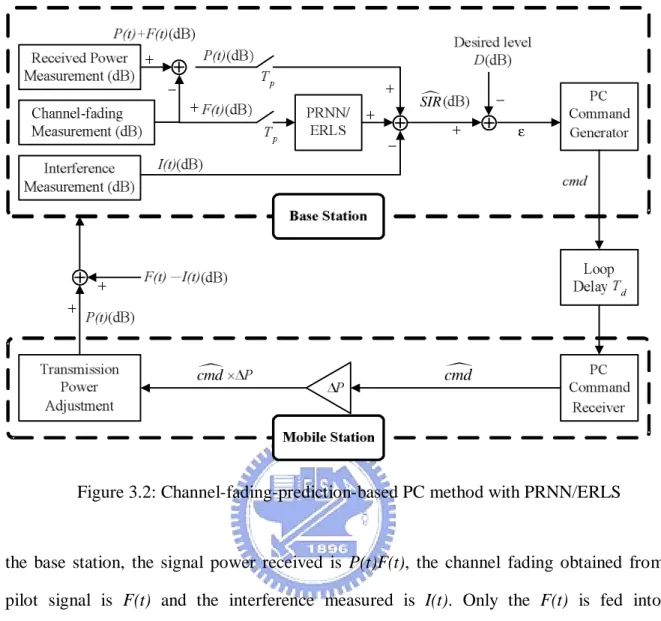
(33) −. SIR. − ε. −. cmd. cmd. Figure 3.2: Channel-fading-prediction-based PC method with PRNN/ERLS. the base station, the signal power received is P(t)F(t), the channel fading obtained from the pilot signal is F(t) and the interference measured is I(t). Only the F(t) is fed into the PRNN/ERLS predictor. The predictor will produce a one-step value. The predicted SIR at the , can be obtained by summing the next-step (next control period) next control period, SIR predicted value of channel fading (in dB) with the transmission power (in dB) and subtracting with the desired SIR level, D, an error ε is the interference (in dB). Comparing the SIR generated. If the error ε is larger than zero, denoting that the SIR level at the next period will be larger than the desired SIR, the PC command, cmd , is set to be − 1; otherwise, it is +1. The base station sends this cmd to the mobile at each update period. The mobile detects the and adjusts the transmission power by an amount of ∆P × cmd dB. command as cmd Because the nonstationary properties of F(t), which are resulted from propagation loss, multi-path and near/far effect, the nonstationary predictor pipeline recurrent neural network/. 23.
(34) extended recursive least square (PRNN/ERLS) adaptive predictor [9] is used. Not only the transmission power but also the interference is excluded from the PRNN/ERLS, so it indeed can eliminate the effect of transmission power on the prediction completely. It is shown that PRNN/ERLS predictor has the property of nonlinearity [9]. In addition, I(t) (in dB)is composed of the received signals from all the mobile stations after power control, and therefore, it behaves very like an independent process, and is difficult to be predicted. For a nonlinear predictor, the input signal, F(t) − I(t) (in dB), also behaves like an independent process with the correlation roughly the same with that of I(t) (in dB). Therefore, it is also difficult to predict the signal, F(t) − I(t). This is also a reason why I(t) (dB) should be removed from PRNN/ERLS in the CFP PC method.. 3.4 Simulation Results and Discussions The CDMA cellular mobile system of 19 cells is considered in the simulation. We concentrate on central cell surrounded by the other 18 cells in a hexagonal-grid configuration [20], [7], and [22]. Also, the problems of sectorization handoff, branch diversity, voice activity are not considered in the simulation. We also assume that there are the same numbers of users of the mobile station in each cell and the users are uniformly distributed in its cell. The mobile station is restricted to communicate through the base station which is closest to itself. The propagation model, the SIR model, and the burst error channel model are shown in section 3.2. In the thesis, each simulation run is the average of 100 simulation results and each result consists 1000 power control cycle. The mobile station is randomly located in each simulation result and remains fixed. The performance of the CFP PC method is compared with those of the link-gain prediction-based PC scheme and the SIR prediction-based PC scheme, denoted by the SIRP PC scheme and the LGP PC scheme, respectively. The traffic considered in the simulations is voice service. Some parameters for simulation are listed in Table 3.1.. 24.
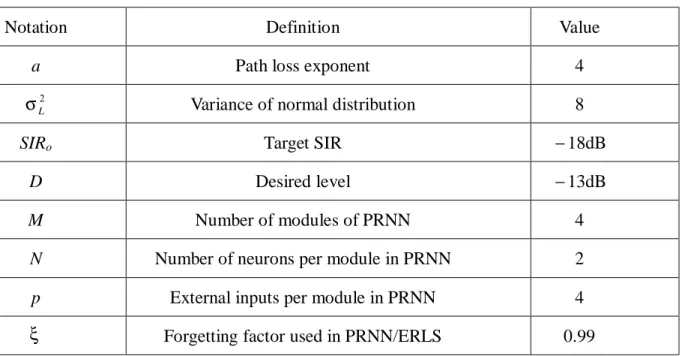
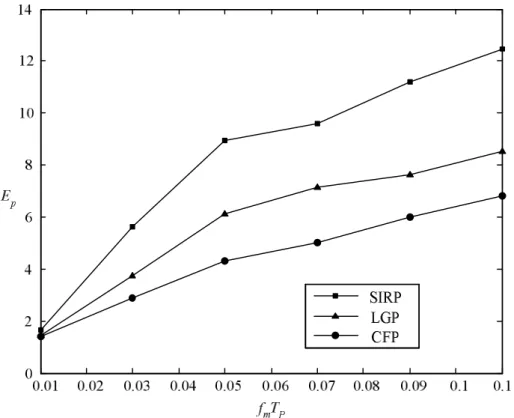
(35) Notation. Definition. Value. a. Path loss exponent. 4. σ L2. Variance of normal distribution. 8. SIRo. Target SIR. − 18dB. D. Desired level. − 13dB. M. Number of modules of PRNN. 4. N. Number of neurons per module in PRNN. 2. p. External inputs per module in PRNN. 4. ξ. Forgetting factor used in PRNN/ERLS. 0.99. Table 3.1: The parameters of the simulation environment. A prediction error, denoted by Ep, is here defined as the mean-square of the difference , and the measured SIR, at the next control period. Although between the predicted SIR, SIR the prediction error is not normalized, however, it is enough to show the performance differences between these PC schemes due to the same parameters of each PC scheme. Figure 3.3 shows the prediction error Ep of the three power control schemes with eight users in each cell versus fmTP. It can be found that CFP achieves the smallest prediction error and SIRP gets the largest, for all Doppler frequency shifts. This is because that CFP predicts only the channel fading which is not influenced by both the transmission power of the mobile station itself and the interference from other independent mobile stations. Conversely, the prediction objective in LGP contains both the channel fading and the interference coming from other independent mobile stations, which is difficult to predict; the prediction objective in SIRP further consists of the transmission power of the mobile station itself, in addition to the channel fading and the interference from other mobile stations. Also, when fmTP increases, the prediction error becomes larger. It is because the correlation between signals decreases as fmTP increases.. 25.
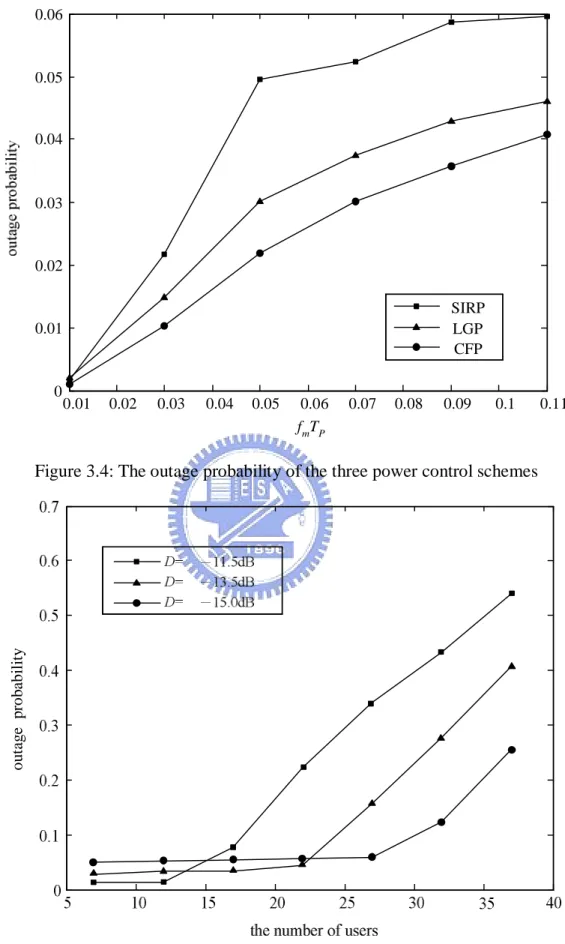
(36) Figure 3.3: The Ep of the three power control schemes. Figure 3.4 shows the outage probability of the three power control schemes with eight users in each cell versus fmTP. It can be seen that, in each PC scheme, when fmTP increases, the outage probability becomes larger. This is because that the correlation of signal becomes smaller as fmTP increases, and therefore, the prediction error becomes larger, no matter which PC scheme is. It also can be found that the CFP PC method performs the best and the SIRP PC scheme the worst. The reason, as stated in Fig. 3.3, is that the former scheme has the least prediction error of the SIR at the next PC cycle and the latter has the largest one.. 26.
(37) 0.06. 0.05. 0.04. 0.03. 0.02 SIRP LGP CFP. 0.01. 0. 0.01. 0.02. 0.03. 0.04. 0.05. 0.06 f mT P. 0.07. 0.08. 0.09. 0.1. outage probability. Figure 3.4: The outage probability of the three power control schemes. Figure 3.5: The outage probability of the CFP PC method. 27. 0.11.
(38) outage probability. Figure 3.6: The outage probability of the LGP PC scheme. Figure 3.7: The outage probability of the SIRP PC scheme. 28.
(39) Figure 3.5, 3.6, and 3.7 show the outage probabilities of the CFP, LGP, and SIRP PC scheme, respectively, with different desired levels versus the number of user when fmTP is set to be 0.05. It can be seen that by using the larger desired level ( − 11.5 dB), it can achieve lower outage probability in all PC schemes when the user number is less. This is because that the transmission power of the signal is larger. However, when the number of user increases, the outage probability increases abruptly the fast. This is because that there is more interference in the system contributed from the larger transmission powers, and therefore the system capacity is restricted. If the smaller desired level is chosen ( − 15 dB), the outage probability is larger when the number of user is less, and the reason is coming from the smaller transmission power. The outage probability increases abruptly slower when the number of user is increased. This is because every mobile station transmits signal with smaller transmission power, so the interference will be smaller, too. Therefore, if the outage probability requirement of the system is set for a particular traffic, the corresponding desired level of each PC scheme should be chosen accordingly to maximize. outage probability. the system capacity.. Figure 3.8: The outage probability of the three power control schemes 29.
(40) Figure 3.8 shows the outage probability of the three schemes versus the number of users when the fmTP is set to be 0.05. It can be seen that, in each curve, when the number of user is small, the outage probability almost does not increase with the number of user. This is because that the interference is not very large, and most of the mobile stations can make their SIR values close to the desired level by adjusting their transmission powers. However, when the number of user becomes large, the outage probability increases abruptly. This is because that when the interference is too large, some mobile stations may no longer be able to make the SIR value close to the desired level by increasing their transmission power owing to that the transmission power is restricted below − 10dB. In the other words, after the number of user exceeds the system capacity, the outage probability increases severely. Therefore, differing from the result shown in Fig. 3.4, in which the increase of outage probability is from the raise of prediction error, the increase of outage probability here is mainly from the increase of mobile station whose required transmission power is larger than − 10dB. In the simulation, we set the outage probability requirement to be 5%. In order to maximize the system capacity, the desired levels D are set to be − 14.5dB for CFP PC method, − 13.5dB for LGP PC scheme, and − 12.5dB for SIRP PC scheme, respectively. It can be found that the CFP PC method improves the system capacity by an amount of 22.7% (58.8%) than LGP (SIRP) PC scheme, respectively. In all the previous simulation results, the PC commands are in error-free channel. That is, the received PC command at the mobile station is the same as that transmitted from the base station. Now, it is simulated in burst error model for the PC command, and the error model is shown in Fig 3.1. Fig. 3.9, Fig. 3.10 and Fig. 3.11 show the outage probability versus fmTP in error-prone channel model when the CFP PC method, LGP PC scheme and SIRP PC scheme are used respectively. In the three figures, it can be seen that the larger the power control command error probability is the larger the outage probability is. This result is intuitional. When the PC command errs, not only the transmission power is not accurate, but also the prediction is. 30.
(41) Figure 3.9: The outage probability of the CFP PC method in error-prone model. Figure 3.10: The outage probability of the LGP PC scheme in error-prone model. 31.
(42) outage probability. Figure 3.11: The outage probability of the SIRP PC scheme in error-prone model. effected. The more frequently this situation occurs, the more possibly outage happened, so the outage probability increases with the increase of kPe. It can also be seen that the larger the burst error length is, the larger the outage probability is, even the overall error probabilities of the PC command, kPe, are the same. This is because that when burst error length is small, although the power control command errs at some cycle, the transmission power can return back to the accurate value in few cycles before outage occurs. However, when the burst error length is large, as long as the power control command errs, there is almost no chance for the transmission power to return to the accurate value, and consequently, outage occurs.. 32.
(43) Figure 3.12: The outage probability of the three schemes in burst error channel model (Pe=0.01 and k=5) Figure 3.12 shows the outage probability of the three schemes versus the number of users when the fmTP is set to be 0.05 in burst error channel model for Pe=0.01 and k=5. In the simulation, in order to maximize the capacity, the desired levels D are set to be − 13.5dB for the CFP PC method, − 12.5dB for the LGP PC scheme, and − 11.5dB for the SIRP PC scheme for 5% outage probability requirement of the voice traffic. Comparing with the results in error-free channel in Fig. 3.8, it takes larger desired level to guarantee the outage probability requirement; therefore, the system capacities are reduced in burst error model. Even though, the CFP PC method still improves the system capacity by an amount of 29% (83.3%) than LGP (SIRP) PC scheme, respectively. Therefore, CFP PC method has more resilience from the PC command error.. 3.5 Conclusions In order to eliminate the effect of the adjustment of the power control on the prediction, 33.
(44) which is exhibit in the power control schemes in chapter 2, in this chapter, the channel fading prediction-based (CFP) power control (PC) method with pipeline recurrent neuron network/extended recursive least square (PRNN/ERLS) predictor is proposed. In the CFP PC method, not only the transmission power of the mobile station but also the interference are removed from the input of the predictor; therefore, the prediction error will not be resulted from the adjustment of the transmission power and the prediction can be more precise. Moreover, the CFP PC method can result in lower outage probability and therefore, larger system capacity. When the PC command is in error-prone channel, which is described in Fig. 3.1, the larger the overall error probability of the PC command is, the larger the outage probability is, no matter which prediction-based PC scheme is adopted. When the overall error probability is the same, the larger the burst error length is, the larger the outage probability is. This is because that there is less chance for the transmission power to recover the accurate value before the outage occurs. Even in burst error channel, the CFP PC method still holds the superiority. Simulations show that, in error-free channel, the CFP PC method improves the system capacity by an amount of 22.7% (58.8%) than the LGP (SIRP) PC scheme, respectively. In burst error channel with Pe and k equal to 0.01 and 5, the CFP PC method still improves the system capacity by an amount of 29% (83.3%) than the LGP (SIRP) PC scheme, respectively. Therefore, the CFP PC method is more robust in error-prone channels. There is still a problem. When the PC command is in the error-prone channel, the performances of all the PC schemes degrade. Therefore, in the next chapter, a mobile-assisted (MA) and channel-fading prediction-based (CFP) PC scheme is proposed. In the MA CFP PC scheme, the mobile-assisted (MA) PC method is used at the mobile station, which can decrease the influence of the PC command error and prediction error.. 34.
(45) Chapter 4 Mobile-Assisted and Channel-Fading-Prediction-Based Power Control Scheme. 4.1 Introduction. F. rom the previous chapter, a channel fading prediction-based (CFP) power control (PC) method was proposed. In the CFP PC method, it can reduce the prediction. error, and therefore, result in lower outage probability and larger system capacity. However, at the last part of the previous chapter, simulations show that when the PC command is in the error-prone channel, all the prediction-based PC schemes suffer from the degradation of performance. The larger the error probability is, the larger the outage probability is. When the PC command errs, not only the transmission power is not accurate, but also the prediction is effected. The more frequently this situation occurs, the more possibly outage happened, so the outage probability increases with the increase of error probability. In addition, the larger the burst error length is, the larger the outage probability is. When burst error length is small, although the power control command errs at some cycle, the transmission power can return to the accurate value in few cycles before outage occurs. However, when the burst error length is large, as long as the power control command errs, there is almost no chance for the transmission power to return to the accurate value, and then outage occurs. In order to decrease the effect of the PC command error, a mobile-assisted (MA) and channel-fading prediction-based (CFP) PC scheme is proposed in this chapter. In the MA CFP PC scheme, a mobile assisted (MA) PC method is used at the mobile station and the MA PC 35.
(46) method can eliminate the effects of PC command error and prediction error. At the mobile station, it receives the pilot signal and report the channel fading back the base station. Therefore, additional information, the channel fading, can be used. In the MA PC method, the mobile station adjusts its transmission power by not only the received PC command but also the slope of channel fading. Because the PC command is no longer the only one information for adjusting the transmission power, the effects of error of PC command and prediction error can be eliminated by using the MA PC method. Noticeably, the MA PC method in the MA-CFP PC scheme also can be adopted by other PC schemes. There is also some power PC scheme [28], in which the slope of link-gain is used to sustain the adjustment of transmission power. However, it is quite different from the MA-PC method. In [28], it is for downlink transmission, and the slope of link-gain is just used to compensate the loop delay. The remainder of chapter is organized as follows. In section 4.2, the mobile-assisted and channel-fading prediction-based PC schemes are proposed. In section 4.3, the simulation results and discussions are shown. Finally, the conclusions are made in section 4.4.. 4.2 Mobile-Assisted and Channel-Fading Prediction-Based PC Schemes In order to eliminate the effect of PC command error, the mobile–assisted (MA) channel-fading prediction-based (CFP) PC schemes are proposed in this section. Noticeably, the MA PC method in MA CFP PC scheme is applied at the mobile station can also be applied in other PC schemes.. 4.2.1 Mobile-Assisted and Channel-Fading Prediction-Based PC Scheme 1 Figure 4.1 shows the mobile-assisted (MA) and channel-fading prediction-based (CFP) power control (PC) scheme 1. At the base station, the operation has been shown in section 3.3,. 36.
(47) cmdC. cmdF. , and D are in dB unit Note: the P(t), F(t), I(t), SIR Figure 4.1: The MA CFP PC scheme 1. which adopts the CFP PC method. At the mobile station, the MA PC method 1 is used. The mobile station adjusts its transmission power every control period Tp, considering not only the , but also the quantization of the slope of channel fading, denoted by cmd, denoted by cmdC . As the slope of channel fading is positive, it implies that the transmission power should cmdF is set to be −1 . On the other hand, as the slope of channel be decreased, thus the cmdF fading is negative, the mobile station should increase its transmission power, thus the cmdF , is designed by is set to be +1 . Consequently, the resulted PC command, denoted by cmd. = α × cmdF + (1 − α ) × cmdC , cmd. (4.1). where α is a weighting factor. The mobile station adjusts its transmission power by the dB. amount of ∆P × cmd 37.
(48) It can be found that in the MA CFP PC scheme 1, no matter how serious the channel fades, the maximum adjustment of transmission power is always ∆P dB; even the prediction of SIR could be very accurate, sometimes the fading still can not be compensated by the adjustment of is transmission power. Moreover, after the value of α is decided, the weighting of cmdF should decided. However, when the slope of channel fading is larger, the weighting of cmdF be larger, too. Therefore, the MA CFP PC scheme 2 is proposed, which can mitigate the problems above.. 4.2.2 Mobile-Assisted and Channel-Fading Prediction-Based PC Scheme 2. cmdC. cmdF. , and D are in dB unit Note: the P(t), F(t), I(t), SIR Figure 4.2: The MA CFP PC scheme 2 38.
(49) Figure 4.2 shows the MA CFP PC scheme 2. At the mobile station, the MA PC method 2 is used. Comparing with the MA CFP PC scheme 1, the difference is only the transfer function at the mobile station. Although we do not change the from slope of channel fading to cmdF can be different when the slope of channel fading is at value of α , the weighting of cmdF different value in this scheme. It also can be seen that when the slope of channel fading is large, and cmdF are we are able to adjust the transmission power by larger step size when cmdC consistent. Noticeably, because the PC command is no longer the only one information for adjusting the transmission power, the MA CFP PC schemes can eliminate effects of PC command error and prediction error, no matter scheme 1 or scheme 2 is. Also, the MA PC methods used at mobile station can cooperate with any kind of PC scheme adopted at base station.. 4.3 Simulation Results and Discussions In this section, the simulations of MA CFP PC schemes CDMA cellular mobile system of 19 cells are shown. The fading model, which includes long-term fading and short-term fading, is defined by (3.1), and is produced by Jakes model (3.5). The SIR model is also shown in section 3.2 and the outage probability is defined in (3.8). The burst error channel model for PC command is shown in Fig. 3.2 and the error probability is kPe. In addition, the problems of sectorization handoff, branch diversity, voice activity are not considered. Noticeably, in the MA CFP PC scheme 1, the MA PC method 1 is used at the mobile station, and this scheme is denoted by MA1-CFP. Moreover, the MA PC method 1 can also be used by the SIRP PC and LGP PC scheme, and they are denoted by MA1-SIRP and MA1-LGP. Similarly, the MA CFP PC scheme 2 is denoted as MA2-CFP; when the MA PC method 2 is applied in the SIRP PC and LGP PC scheme, they are denoted by MA2-SIRP and MA2-LGP respectively. In the beginning of this section, we show the effect of α on the outage probability for the PC schemes with the MA PC method 1 with different fmTP in error-free channel. As shown in Fig.4.3, Fig.4.4, and Fig.4.5, they are the outage probabilities of the MA PC 39.
數據
+7
相關文件
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
• Formation of massive primordial stars as origin of objects in the early universe. • Supernova explosions might be visible to the most
We have also discussed the quadratic Jacobi–Davidson method combined with a nonequivalence deflation technique for slightly damped gyroscopic systems based on a computation of
As for other sections, apart from the 9.81% decrease of the price index of Education, lower charges for mobile phone services drove the price index of Communication down by
(Another example of close harmony is the four-bar unaccompanied vocal introduction to “Paperback Writer”, a somewhat later Beatles song.) Overall, Lennon’s and McCartney’s
專案執 行團隊
Digital PCR works by partitioning a sample into many individual real-time PCR reactions, some portion of these reactions contain the target molecules(positive) while others do
For MIMO-OFDM systems, the objective of the existing power control strategies is maximization of the signal to interference and noise ratio (SINR) or minimization of the bit
