E L S E V I E R Fuzzy Sets and Systems 93 (1998) 17 22
FUZZY
sets and systemsA new interpolative reasoning method in sparse rule-based systems
Wen-Hoar Hsiao, Shyi-Ming Chen*, Chia-Hoang Lee
Department of Computer and Information Science, National Chiao Tung University, Hsinchu, Taiwan, ROC Received February 1996; revised June 1996
Abstract
In [7], Yan et al. analyzed Koczy and Hirota's linear interpolative reasoning method presented in I-2, 3] and found that the reasoning consequences by their method sometimes become abnormal fuzzy sets. Thus, they pointed out that a new interpolative reasoning method will be needed which can guarantee that the interpolated conclusion will also be triangular-type for a triangular-type observation. In this paper, we extend the works of [2, 3, 7] to present a new interpolative reasoning method to deal with fuzzy reasoning in sparse rule-based systems• The proposed method can overcome the drawback of Koczy and Hirota's method described in [7]. It can guarantee that the statement "If fuzzy rules A 1 ~ B 1 , A 2 ~ B 2 and the observation A* are defined by triangular membership functions, the interpolated conclusion B* will also be triangular-type" holds. © 1998 Elsevier Science B.V.
Keywords: Linear interpolative reasoning; Fuzzy approximate reasoning; Sparse rule-based systems
1. Introduction
It is obvious that the number of fuzzy rules in fuzzy rule-based systems can significantly affect the performance of rule-based systems. The more sparse the fuzzy rule bases, the faster the rule-based systems in execution. Thus, several approximate reasoning methods based on sparse fuzzy rule bases have been proposed in [1, 2, 3,6]. In those sparse rule-based systems, the rule bases are incomplete, i.e., there are many empty spaces between member- ship functions of the antecedents of rules. When the membership function of the observation occurs on empty space, no rule will be fired and no conse-
* Corresponding author.
quence is derived [7]. In order to cope with this problem, in [2, 3] Koczy and Hirota have present- ed a linear interpolative reasoning method for solv- ing the "tomato classification" problem presented in [6, 8]. We can see that the method presented in [2, 3] is useful in sparse rule-based systems to deal with fuzzy reasoning.
In [7], Yan et al. analyzed Koczy and Hirota's interpolative reasoning method presented in [2, 3], and pointed out that the reasoning consequences of the method sometimes become abnormal fuzzy sets, where they proved that the statement "If fuzzy rules A1 ~ B1, A2 ~ B2 and the observation A* are defined by triangular membership functions, the interpolated conclusion B* will also be triangular- type" mentioned in [2, 3] is improper, and they also showed two reasoning conditions in which the method presented in [2, 3] can work normally. 0165-0114/98/$19.00 (C) 1998 Elsevier Science B.V. All rights reserved
18 W.-H. Hsiao et al. / Fuzzy Sets and Systems 93 (1998) 17-22 Furthermore, in [7], Yah et al. also hope that
someone can develop a new interpolative reasoning method which can guarantee that the interpolated conclusion will also be triangular-type for a tri- angular-type observation. F r o m the analytic result of [7], we can see that the reasoning consequence sometimes become abnormal fuzzy set using Koczy and Hirota's interpolative reasoning method pre- sented in [2, 3] due to the fact that their method only interpolated the bottoms of the fuzzy sets but ignored the interpolations of the highest points of the fuzzy set in the interpolative reasoning process.
In this paper, we extend the works of [2, 3, 7] to present a new interpolative reasoning method to deal with fuzzy reasoning in sparse rule-based sys- tems. The proposed method can overcome the drawback of Koczy and Hirota's method described in [7]. The proposed method can guarantee that the statement "If fuzzy rules A1 ~ B1, A2 ~ B2 and the observation A* are defined by triangular membership functions, the interpolated conclusion B* will also be triangular-type" holds. Thus, the proposed method is more general than the one presented in [2, 3] because it can overcome the drawback of Koczy and Hirota's interpolative rea- soning method described in [7].
The rest of this paper is organized as follows. In Section 2, we briefly review the fuzzy reasoning problem in sparse fuzzy rule bases from [5, 7]. In Section 3, we propose a new interpolative reason- ing method based on [2, 3, 7]. In Section 4, we use some examples to illustrate the interpolative rea- soning process. The conclusions are discussed in Section 5.
2. Fuzzy reasoning problem in sparse fuzzy rule bases
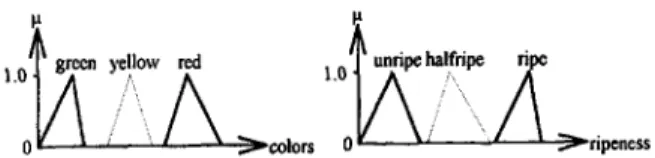
A typical example for fuzzy reasoning in sparse rule-based systems is the "tomato classification" problem proposed by Mizumoto and Zimmermann [5]. We briefly describe this problem as follows. Assume that the "tomato classifier" decides the degree of ripeness by evaluating the colors of tom- atoes, where the membership functions of the fuzzy terms "red", "green", "ripe", "unripe", "yellow", and
O" " //:'""
~ colors 0 Ir ~tipencssFig. 1. Fuzzy reasoning assumption of the tomato classification problem.
'halfripe" are shown in Fig. 1. Assume that there is a sparse rule base consisting of only two rules:
Rule 1: I f a tomato is red then the tomato is ripe. Rule 2: If a tomato is green then the tomato is
unripe.
We can see that it cannot derive any consequence when the observation "This tomato is yellow" oc- curs, i.e.,
Rule 1: I f a tomato is red then the tomato is ripe. Rule 2: If a tomato is green then the tomato is
unripe.
Observation: This tomato is yellow. Consequence: ???.
The problem occurred due to the fact that the membership function "yellow" has no overlapping with membership functions "red" or "green". Thus, the conventional fuzzy reasoning schemes cannot fire any rule.
In order to solve the problem mentioned above, Koczy and Hirota presented a linear interpolative fuzzy reasoning method in [2, 3]. In the following, we briefly review some definitions and reasoning conditions on Koczy's interpolative reasoning method in sparse fuzzy rule bases from [2, 3, 7].
Definition 2.1. Let the set of all normal and convex
fuzzy sets of the universe Xi be denoted by P(Xi). For A1,A2 ~ P(Xi), if Vc~ e (0, 1], the following conditions hold:
inf{Al~} < inf{A2~}, sup{Al~} < sup{A2~}, then A1 is said to be less than A2 (i.e., A1 < A2), where A1, and A2~ are c~-cuts of A~ and A2, respec- tively, inf{A,,} is the infimum of A~,, and sup{Ai~} is the supremum of Ai, (i = 1, 2) [7].
Definition 2.2. Let R < be a fuzzy relation, R < =
{(A1,A2)iA1,A2 ~
P(X), A1 < A2}. If fuzzy setsA t and A2 satisfy R<, then the lower and upper fuzzy distances between A, and A2 are defined as follows [7], by using the resolution principle [2]: dE(A,, A2):R< ~ P([0, 1]), ]2dL(A,,AD(3)= a~[0, ,1 2 d ( i n f { A l ~ } , i n f { A 2 ~ } ) ' du(A1, A2):R< ~ P([0, 1]), ~t
Pd~(A,,A~,(3)= ~
d(sup{A~,},sup{a2,})'
~[0, 1]where 6 ~ [0, 1] and d is the Euclidean distance [2, 3].
Definition 2.3. Let A 1 ~ B 1 and A2 ~ B 2 be dis-
joint fuzzy rules on the universe of discourse X x Y, and A,, A2 and B~, B2 be fuzzy sets on X and Y, respectively. Assume that A* is the observation of the input universe X. If AI < A* < A2, then the linear fuzzy rule interpolation between R, and R2 is defined as follows [7]:
d(A*,A~): d(A*,A2) = d(B*,B,): d(B*,B2).
(1)Definition 2.4. Let A1 and A 2 be fuzzy sets on the
universe of discourse X with [XI < 0o. The lower and the upper distances between a-cuts At, and A2~ are defined as follows [7]:
dL(Al~, A2~)= d(inf{At~}, inf{A2~}), (2)
du(A,,,A2,)
= d(sup{A1,}, sup{A2~}). (3)From the above definitions, (1) can be redefined a s
*
dL(A~,
AI~). dL(A*, A2~)= dL(B~, Sly). dL(B*,
* • B2,),*
du(A,,
A,~).du(A,,
* A2,) =dv(S,,
* Sa~). "du(S*,
B2,), which can be written asinf{B*}
= dL(A*,Ax,)inf{B2,} + dL(A*,A2,)inf{Bx~}
dE(A*, A,,) + dL(A*,A2~)
(4)
sup{B*}
du(A*,AI~)sup{B2~} + du(A*,A2~)sup{Bl~}
du(A* A1~) +
,du(A~,
*
A2~t)(5)
In [7], Yan et al. have shown two reasoning conditions on Koczy and Hirota's interpolative reasoning method which can let the statement "If fuzzy rules A1 =~ B,, A 2 ~ B 2 and the observation A* are defined by triangular membership functions, the interpolated conclusion B* will also be triangu- lar-type" hold. These two conditions are restated as follows:
dL(A*, A,,)
Condition 1: = fl,
dE(A*,
AI~ ) +dL(A*,
A2~)where fl ~ [0, 1].
dL(B2~, BI~)
Condition 2: - 7, where 7 > 0.
dL(A2~,
Ai~)From the analytic result of [7], we can see that the reasoning consequence of Koczy and Hirota's interpolative reasoning method sometimes become abnormal fuzzy sets due to the fact that their method only interpolated the bottoms of the fuzzy sets but ignored the interpolations of the highest points of the fuzzy set in the interpolative reasoning process.
3. A new interpolative fuzzy reasoning method
In this section, we present a new interpolative fuzzy reasoning method based on [2, 3, 7]. The pro- posed method can overcome the drawback of Koczy and Hirota's method described in [7]. It can guarantee that the statement "If fuzzy rules
A, ~ B , , A 2 ~ B 2
and the observation A* aredefined by triangular membership functions, the interpolated conclusion B* will also be triangular- type" holds. The proposed method not only interpolates the bottoms of the fuzzy set, but also interpolates the highest point of the fuzzy set in the interpolative fuzzy reasoning process.
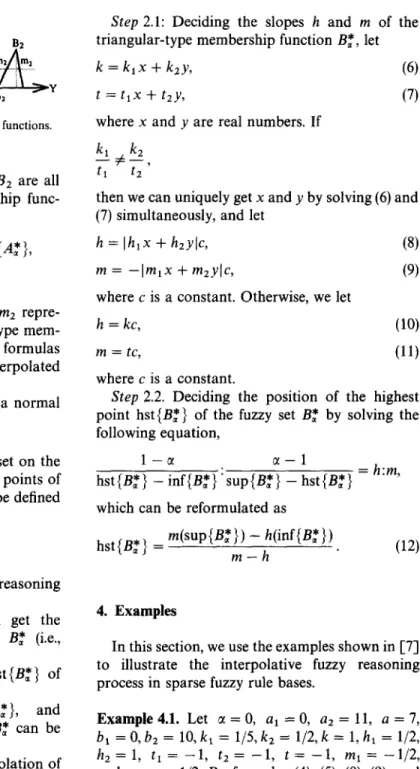
Fig. 2 shows a general case of interpolative fuzzy reasoning schemes with triangular membership functions, where the fuzzy sets AI, A*, A2, B I , B * ,
20
W.-1t. Hsiao et al. / Fuzzy Sets and Systems 93 (1998) 17-22~ BI B*
B21.0 AI A* A2
1.0 1. /~ t. ~b\m h a m 2 InffL~m~'[ 2/rl~ I ~ } ...
A ~
~ X
a~ll/ i \/: i.~7-~
-,/--~
... ~ Y
al a a 2 bl b2
Fig. 2. Interpolation with triangular membership functions.
and B 2 of the rules A 1 ~ B 1 and A 2 ~ B 2 are all defined by the triangular-type membership func- tions, where
al = inf{A1,}, bl = inf{B1,},
a2 = inf{A2~}, a =inf{A*},
b2 =
inf{B2~},and k l , t l , k , t , k 2 , t 2 , h l , m i , h , m , h2, and m2 repre- sent the slopes of the above triangular-type mem- bership functions as shown in Fig. 2. By formulas (1)-(5), we can get the bottoms of the interpolated fuzzy set B* (i.e., inf{B* } and sup {B* }).
The definition of the highest point of a normal fuzzy set is presented as follows.
Definition
3.1. Let A be a normal fuzzy set on theuniverse of discourse X, then the highest points of the fuzzy set A, denoted by hst {A}, can be defined
as
hst{A} = {xlpA(x) = 1, x ~ X}.
The proposed interpolative fuzzy reasoning method is presented as follows:
Step 1: By formulas (1)-(5), we can get the bottoms of the interpolated fuzzy set B* (i.e., inf{B*} and sup{B*}).
Step 2: Deriving the highest point hst{B* } of the fuzzy set B*.
S t e p 3 : Based on inf{B*}, hst{B*}, and sup{B*}, the interpolative conclusion B* can be uniquely decided.
In the following, we discuss the interpolation of the highest point hst{B*} (i.e., discuss Step 2 of the proposed method) in order to guarantee that the interpolated consequence will also be triangular- type for a triangular-type observation.The method to derive the highest point hst{B* } of the fuzzy set B* is presented as follows:
Step 2.1: Deciding the slopes h and m of the triangular-type membership function B*, let
k = k l X + k2y, (6)
t = t l X + t2y, (7)
where x and y are real numbers. If kl k2
tl
t2 '
then we can uniquely get x and y by solving (6) and (7) simultaneously, and let
h = IhlX + h2ylc, (8)
m = - I m l x + m2ylc, (9)
where c is a constant. Otherwise, we let
h = kc, (10)
m = tc, (11)
where c is a constant.
Step 2.2. Deciding the position of the highest point hst{B*} of the fuzzy set B* by solving the following equation,
1--ct ~ - 1
= h:m,
hst {B* ) - inf{B* ) sup {B* ) - hst {B* ) which can be reformulated as
hst{B*} = m(sup{B*}) - h(inf{B*)) (12)
m - h
4. Examples
In this section, we use the examples shown in 1-7] to illustrate the interpolative fuzzy reasoning process in sparse fuzzy rule bases.
Example
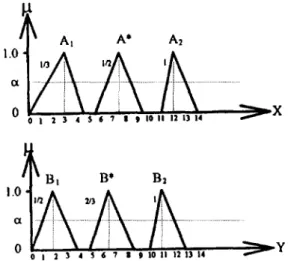
4.1. Let ~ = 0, al = 0, a2 = 11, a = 7,bx = 0, b2 = 10, kl = 1/5, k2 = 1/2, k = 1, hi = 1/2,
h2= 1, [1 = - - 1 , t 2 = - - 1 , t = --1, //'/1 = - 1 / 2 ,
and m2 = - 1 / 2 . By formulas (4), (5), (8), (9), and (12), we can get
inf{B* } = 6.4, sup {B* } = 7.4, hst {B* } = 6.6.
1.0 Q 0 At A* A~ • i I I I I I I I ~ " - X I ) 3 4 ~ ~ q s ~ 1o 11 12 15 14
)
110 • nl 0 AI A* A2 I 2 $ 4 $ 6 7 8 II I0 I I 12 13 14 g~Bt
B*
B)
:IA
... ...
...
Y~Bt
B*
B)
Fig. 3. The reasoning result of Example 4.1. Fig. 5. The reasoning result of Example 4.2. X Y 1.0 0 A t A* A~ • i I I I I I i I ~ ' - X 2 3 4 s 6 7 J 9 IO II 121al4
i
Bi B*B2
o r " 1 2 3 4 $ 6 7 l x ; l \ 9 l0 II II 13 14 aLFig. 4. The reasoning result by Koczy and Hirota's m e t h o d (adapted from [7]).
T h e r e a s o n i n g result is represented b y B* s h o w n in Fig. 3. F r o m [7], we can see t h a t K o c z y a n d H i r o t a ' s linear interpolative r e a s o n i n g m e t h o d s h o w n in [2, 3] will get the a b n o r m a l r e a s o n i n g result represented b y the B* s h o w n in Fig. 4. F r o m Figs. 3 a n d 4, we can see t h a t the p r o p o s e d m e t h o d is better t h a n the one presented in [2, 3].
E x a m p l e 4.2. Let ~ = 0, a~ = 0, a 2 = 11, a = 5.5, bl = 0, b 2 = 10, kl = 1/3, k 2 = 1, k = 1/2, hi = 1/2, h2 = 1, [ 1 = - - 2 / 3 , tz = - - 1 / 2 , t = - - 1 / 2 , ml = - 1/2, a n d m2 = - 1/2. By f o r m u l a s (4), (5), (8), (9), a n d (12), we can get inf{B* } = 5.0, sup {B* } = 8.7, hst{B*} = 6.5. T h e r e a s o n i n g result is represented by B* s h o w n in Fig. 5. F r o m Fig. 5, we can see t h a t the r e a s o n i n g result of the p r o p o s e d m e t h o d is very close to the one presented in [7]. E x a m p l e 4.3. Let c~ = 0, al = 0, a2 - = 9, a = 5, bl = 1, b 2 = 10, kl = 1/3, k 2 = 1/4, k = 1/2, hx = 1 / 2 , h 2 = 1/3, tl = - 1 , t 2 = - l , t = - l , ml = - 1, a n d m2 = - 1. By f o r m u l a s (4), (5), (8), (9), a n d (12), we can get inf{B* } = 6.0, sup{B~} = 8.0, hst{B*} = 7.0. T h e r e a s o n i n g result is represented by B* s h o w n in Fig. 6. F r o m Fig. 6, we can see t h a t the r e a s o n i n g result of the p r o p o s e d m e t h o d is very close to the one presented in [7].
22 W.-H. Hsiao et aL / Fuzzy Sets and Systems 93 (1998) 17-22 J 1.0 Ot 0 1.0 (X 0 Ai A* A2
A
/ i | I I t 1 i t ~ " - X I 2 3 4 $ 6 7 II 9 I0 II 1'2 15 14 / BI B* Bz 2 3 4 $ 6 "/ II 9 l0 |1 12 13 14Fig. 6. The reasoning result of Example 4.3.
5. Conclusions
In this paper, we have extended the works of [-2, 3, 7] to present a new interpolative reasoning method to deal with fuzzy reasoning in sparse rule- based systems. From the examples shown in Section 4, we can see that the proposed method can overcome the drawback of the one presented in [-2, 3]. It can guarantee that the statement "If fuzzy rules A1 =~ B1, A2 =~ B2 and the observation A* are defined by triangular membership functions, the interpolated conclusion B* will also be triangular- type" holds. Thus, the proposed method is more general than the one presented in [2, 3] because it
can overcome the drawback of Koczy and Hirota's interpolative reasoning method described in [7].
Acknowledgements
This work was supported in part by the National Science Council, Republic of China, under Grant NSC 85-2623-D-009-004.
References
[1] A. Kaufmann and M.M. Gupta, Fuzzy Mathematical
Models in Engineering and Management Science (Elsevier,
Amsterdam, 1988).
[2] L.T. Koczy and K. Hirota, Interpolative reasoning with insufficient evidence in sparse fuzzy rule bases, Inform. Sci. 71 (1993) 169-201.
[3] L.T. Koczy and K. Hirota, Approximate reasoning by lin- ear rule interpolation and general approximation, Internat.
J. Approx. Reasoning 9 (1993) 197-225.
[4] R. Lopez de Mantaras, Approximate Reasoning Models (Halsted Press, New York, 1990).
[5] M. Mizumoto and H.-J. Zimmermann, Comparison of fuzzy reasoning methods, Fuzzy Sets and Systems 8 (1982) 253-283.
1-6] E. Sanchez and L.A. Zadeh, Eds., Approximate Reasoning in
Intelligent Systems, Decision and Control (Pergamon,
Oxford, 1987).
[7] S. Yan, M. Mizumoto and Wu Zhi Qiao, Reasoning condi- tions on Koczy's interpolative reasoning method in sparse fuzzy rule bases, Fuzzy Sets and Systems 75 (1995) 63-71. [8] L.A. Zadeh, Interpolative reasoning in fuzzy logic and neu-
ral network theory, Proc. 1st IEEE lnternat. Conf. on Fuzzy