tromechanical systems (MEMS). In this paper, the fabrication and testing of optical and actuator components for a MEMS-based optical pickup are presented. A novel design methodology is also applied to the servo control system of the pickup.
Index Terms—Actuator, microelectromechanical systems (MEMS), optical pickup, silicon on insulation (SOI), small form factor.
I. INTRODUCTION
A
S the blue optical storage technology matures, other storage mechanisms such as hologram, near field, and multi layer/level are being eagerly pursued. From the appli-cation point of view, microdisk drives for portable consumer devices, such as mobile phones and portable media players, are also an area of intense research. In this regard, small-form-factor optical drive and pickup technologies have been proposed or commercialized. In [1], the drive was constructed by the as-sembly of miniaturized optomechanical components found in conventional drives. In [2] and [3], a miniaturized optical pickup unit containing the laser diode (LD), photodetectors (PD), and optical components was assembled and mounted in a swing arm actuator. In [4]–[6], similar optical pickup modules were used in a more traditional head assembly or testbed. In [7], a slider-type optical flying head and a separate base optical unit containing LD, PD, and optical components were assembled on a swing arm actuator. In these works, most of the microoptical, mechanical (actuator), and electrical (LD and PD) components are conventional discrete components. The assembly of numerous microparts becomes tedious and the cost of the system can not be reduced easily.To reduce the number of components, several approaches based on some forms of semiconductor fabrication processes have been proposed. However, the planar integrated optics approach suffers from high coupling and waveguide losses [8]. Stacking of planar optical components is challenged in the alignment and assembly processes [9]. In [10], a microoptical pickup based on the microelectromechanical systems (MEMS) technology was proposed. It then becomes possible to integrate optical, mechanical, and electrical components all in a common
Digital Object Identifier 10.1109/TMAG.2006.888402
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
substrate. In [11], we proposed such a MEMS-based optical pickup composed of an electrooptical and an actuator chips, both of which are fabricated monolithically. The assembly process can, therefore, be much simplified. In this paper, we present the design, fabrication, and control of the components in this MEMS-based optical pickup.
II. ELECTROOPTICALCHIP
Surface micromachining is an important technology in MEMS due to its design versatility and IC-like fabrication. It has gained another degree of freedom in the vertical dimen-sion since the demonstration of microhinges and microoptical benches [12], [13]. Traditional surface micromachining uses thin poly-silicon layers as the structural and optical material. However, it has several disadvantages for optical applications, such as surface curvature induced by residual stress, absorption of visible light, and poor performance as an optical detector. To increase the stiffness and reduce the effect of residual stress, structures employing high-aspect-ratio poly-silicon processes or silicon-on-insulation (SOI) wafers were proposed [14]–[16]. However, the high deposition temperature of poly-silicon in these processes may affect the performance of photo detectors or circuits if they are to be fabricated on the same substrate. In this paper, a novel fabrication process to integrate SOI and SU-8 negative photoresist is demonstrated as a low-temperature and inexpensive process compared to the current technologies. In this process, signal processing circuits, photo detectors, and flat mirror surfaces are fabricated in the SOI device layer; microoptical devices and stressed related structures can be fabricated in the SU-8 layer.
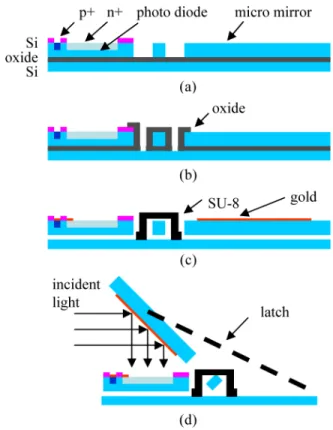
As an example, the fabrication process of a flipped mirror is shown in Fig. 1. The micromirror structure is first defined in the device layer of the SOI substrate using deep reactive ion etching (DRIE), followed by the fabrication of circuits and photo diodes [Fig. 1(a)]. An oxide layer is then deposited and patterned as the second sacrificial layer [Fig. 1(b)]. Gold is deposited and patterned for electrical contact and mirror surface. Finally, SU-8 is spin-coated and patterned. The structures are then released 0018-9464/$25.00 © 2007 IEEE
Fig. 1. Fabrication processes of the electrooptical chip. (a) Define structure and fabricate photodiode. (b) Deposit and define oxide sacrificial layer. (c) De-posit and define gold; spin-coat and define SU-8; release. (d) Flip and assemble mirror.
by HF etching [Fig. 1(c)]. Due to the residual stress developed in SU-8, SU-8/Si bimorph beams can be used as lifting arms to facilitate microassembly. Optical devices such as gratings or Fresnel lens can be patterned in the SU-8 layer which has high transmittance in the visible spectrum range. Fig. 1(d) shows the schematic of a -flipped mirror with an underneath photo diode to detect the returned optical signal from the disc.
Fig. 2 is a micromirror fabricated using this process before flipping, showing the flat single-crystal-silicon mirror surface, SU-8 hinges, stressed beams, and photo diodes. The measured residual stress in SU-8 is about 27 MPa, close to that reported in the literature [17]. The – curves of the photo diodes are shown in Fig. 3. The measured sensitivity is about 1.8 A/W at 650-nm wavelength. Therefore, the simple and inexpensive fabrication process is demonstrated for the integration of mi-crooptical devices and photo detectors. Our current efforts are focused on better mechanism design and integration of other op-tical components in the pickup.
III. SERVOACTUATOR
A. Design Concept
Piezoelectric actuators [18] and bimorph thermal actua-tors [19] have been exploited as tracking servo actuaactua-tors in data storage systems. Electrostatic optical focusing actuators have also been demonstrated in [20]. However, it is difficult to integrate the actuator component and the objective lens monolithically on a single chip. It this paper, we demonstrate a
Fig. 2. Fabricated micromirror and photo diode.
Fig. 3. I–V curves of the photo diode.
Fig. 4. Schematic of the bidirectional focusing actuator.
novel bidirectional focusing actuator and integrated UV-cured polymer lens on a single chip using self-aligned vertical comb drive structure.
The schematic of the out-of-plane bidirectional focusing ac-tuator is shown in Fig. 4. It is composed of vertical comb actua-tors, a lens holder, and a UV-cured polymer lens (or a microball lens). The movable lens holder is connected to a stationary rigid frame by four thin-film springs. The upward or downward po-sition of the lens holder is controlled by two sets of vertical comb actuators. As indicated in Fig. 4, the moving electrodes are located below the stationary electrodes in the upward ac-tuator, whereas the moving electrodes are above the stationary electrodes in the downward actuator. The stationary electrodes
out-of-plane stiffness is close to 100, which also helps suppress the side-sticking effect.
B. Fabrication and Testing
The fabrication processes of this actuator are illustrated in Fig. 5. It begins with the growth and patterning of thermal oxide [Fig. 5(a)]. A second photolithography is used to define the self-aligned trench structure. The photoresist in Fig. 5(a) is re-moved after the first DRIE. The thermal oxide is then used as the etching mask of the second DRIE. The self-aligned trenches with two different depths after the second DRIE are shown in Fig. 5(b). After that, the trenches are fully refilled with thermal oxide and poly-silicon (Poly1) deposited by low pressure chem-ical vapor deposition (LPCVD) [Fig. 5(c)]. After Poly1 is pat-terned, a Si N layer and the second poly-silicon (Poly2) layer are deposited and patterned for structures and electrical inter-connection [Fig. 5(d)]. The third DRIE is used to etch Poly1 again to define the vertical comb structures [Fig. 5(d)]. In ad-dition, the lens holder is implemented in the shallow refilled trenches. In Fig. 5(e), low stress nitride is deposited and pat-terned as the mask for the subsequent bulk silicon etching. The substrate is then etched in the tetramethyl ammonium hydroxide (TMAH) solution to release the suspended poly-silicon struc-ture which is fully protected by the thermal oxide and Si N films. A through hole is fabricated for light to pass through the wafer. Finally, the protection layers are removed and a UV-cur-able polymer droplet is dropped to the lens holder, as shown in Fig. 5(f).
Fig. 6(a) shows the fabricated actuator. The initial engage-ment between the upward and downward combs is 3 m to provide a large electrostatic driving force. Fig. 6(b) shows the UV-cured polymer lens centered in the lens holder with a diam-eter of 200 m. The measured surface roughness of the lens is smaller than 5 nm. The focusing of light by the polymer lens can be observed on a CCD monitor. The typical spot size is 5 m and the numerical aperture is 0.3. Whereas the polymer lens is used to demonstrate the functionality of the integrated module, a dedicated molded lens may be mounted to the lens holder for practical application. The static and dynamic out-of-plane displacements of the actuator are shown in Fig. 7. The max-imum static displacements for both upward and downward di-rections are 12.5 m for a driving voltage of 35 V. The dynamic response shows a resonant frequency of the first out-of-plane spring bending mode of 1.1 kHz. Therefore, an out-of-plane
Fig. 5. Fabrication processes of the actuator.
Fig. 6. Fabricated focusing actuator.
bidirectional focusing MEMS actuator with a large bandwidth is demonstrated. Our current efforts are focused on the integration of focusing and tracking actuators using the same fabrication platform.
Fig. 7. (a) Static and (b) dynamic responses of the actuator.
Fig. 8. Two-degree-of-freedom uncertain feedback system.
IV. SERVOCONTROL
Traditional servo control design in optical disk drives em-ploys PID or lead-lag compensation and trial-and-error proce-dures to find the optimal controller parameters. While simple in principle, it is less efficient and more susceptible to the vari-ation of component characteristics. Therefore, a more system-atic and roubust approach combining the quantitative feedback theory (QFT) and the theory [24] is demonstrated for the servo control design in optical disk drives. In this approach, the theory improves the complicated Nichol charts in the QFT design. On the other hand, the QFT is used to find the weighting functions in the control theory.
A two-degree-of-freedom uncertain feedback system is used to model the pickup servo system where is the plant, is the controller, and is a prefilter used to adjust the system charac-teristics (Fig. 8). The QFT/ design approach consists of two stages. In the first stage, the system characteristics in the time domain, such as settling time and overshoot, are translated as the upper and lower allowable bounds in the frequency domain. The controller parameters are then found by using the combined de-sign technique. In the second stage, the prefilter outside the con-trol loop is used to achieve the system specifications as practiced
Fig. 9. QFT/H design flow.
in the QFT design procedure. The overall design flow is illus-trated in Fig. 9.
The tracking servo in a commercial DVD ROM drive is used to demonstrate the combined QFT/ design approach. The transfer function of the tracking actuator is given as
and the time domain sepcifications of the tracking system are settling time
maximum overshoot %
The time domain specifications [Fig. 10(a)] are translated to the upper and lower bounds in the frequency domain [Fig. 10(b)]. The controller and prefilter are then obtained by the QFT/ design approach as
The closed loop responses in both time and frequency domains are shown in Fig. 10 to be within the system specification.
The controller and prefilter are programmed into the firmware of a commercial DVD ROM drive. Fig. 11 shows the improved tracking error signal of a track jump operation using the new controller as compared to that obtained by using the default con-troller. Therefore, the robust control design based on QFT/ and its application to the optical drive design is successfully demonstrated.
V. CONCLUSION
Novel electrooptical modules, microactuators, and control system design methodology for a MEMS-based micropickup are proposed and demonstrated. The new fabrication processes of the microoptical bench provide a platform for the integration of circuits, photo detectors and optical components. The mi-croactuator with UV cured polymer lens shows the capability of focusing control. The more systematic QFT/ design approach has been verified in a traditional optical pickup. Our
Fig. 10. Tracing servo response (a) time domain and (b) frequency domain.
Fig. 11. Tracking error signal.
current efforts are focused on the two-chip packaging process for the electrooptical and actuator chips. The microactuators are also being characterized in the combined QFT/ servo system design flow.
ACKNOWLEDGMENT
The authors would like to thank the National Center for High-performance Computing of the Republic of China for computer time and facilities. This work was supported in part by the Min-istry of Economic Affairs of the Republic of China under Grant 93-EC-17-A-07-S1-0011.
[7] S. Kim, et al., “An optical flying head assembly for a small-form-factor plastic disk in PCMCIA-like drive,” Jpn. J. Appl. Phys., vol. 43, no. 7B, pp. 4752–4758, 2004.
[8] S. Ura, T. Suhara, H. Nishihara, and J. Koyama, “An integrated-optic disc pickup device,” in Proc. Electronics Communications in Japan, Part 2: Electronics, 1987, vol. 70, no. 2, pp. 92–100.
[9] J. Y. Chang, C. M. Wang, C. C. Lee, H. F. Shih, and M. L. Wu, “Real-ization of free-space optical pickup head with stacked Si-based phase elements,” IEEE Photon. Technol. Lett., vol. 17, no. 1, pp. 214–216, Jan. 2005.
[10] M. Wu, “Micromachining for optical and optoelectronic systems,” Proc. IEEE, vol. 85, no. 11, pp. 1833–1856, Nov. 1997.
[11] Y. Chiu, C. H. Chen, J. C. Chiou, W. Fang, and H. P. D. Shieh, “MEMS-based miniature optical pickup,” IEEE Trans. Magn., vol. 41, no. 2, pp. 967–970, Feb. 2005.
[12] K. S. J. Pister, M. W. Judy, S. R. Burgett, and R. S. Fearing, “Microfab-ricated hinges,” Sens. Actuators A, vol. 33, no. 3, pp. 249–256, 1992. [13] M. C. Wu, L. Y. Lin, S. S. Lee, and K. S. J. Pister, “Micromachined
free-space integrated micro-optics,” Sens. Actuators A, vol. 50, no. 1–2, pp. 127–134, 1995.
[14] C. G. Keller and R. T. Howe, “Hexsil tweezers for teleoperated micro-assembly,” in Proc. Dig. IEEE MEMS, 1997, pp. 72–77.
[15] F. Ayazi and K. Najafi, “High aspect-ratio combined poly and single-crystal silicon (HARPSS) MEMS technology,” J. Microelectromech. Syst., vol. 9, pp. 288–294, 2000.
[16] V. Milanovic, “Multilevel-beam SOI-MEMS fabrication and applica-tions,” J. Microelectromech. Syst., vol. 13, no. 1, pp. 19–30, 2004. [17] R. Feng and R. J. Farris, “Influence of processing conditions on the
thermal and mechanical properties of SU8 negative photoresist coat-ings,” J. Micromech. Microeng., vol. 13, no. 1, pp. 80–88, 2003. [18] Y. Yee, H. J. Nam, S. H. Lee, J. U. Bu, Y. S. Jeon, and S. M. Cho, “PZT
actuated micromirror for nano-tracking of laser beam for high-density optical data storage,” in Proc. Dig. IEEE MEMS, 2000, pp. 435–438. [19] J. P. Yang, X. C. Deng, and T. C. Chong, “An electro-thermal
bi-morph-based microactuator for precise track-positioning of optical disk drives,” J. Micromech. Microeng., vol. 15, no. 5, pp. 958–965, 2005. [20] S. H. Kim, et al., “Integrated micro optical flying head with lens
po-sitioning actuator for small form factor data storage,” in Proc. Dig. Int. Conf. Solid-State Sensors, Actuators, Microsystems (Tranducers), 2003, pp. 607–610.
[21] J. M. L. Tsai, H. Y. Chu, J. Hsieh, and W. Fang, “The BELST II process for silicon HARM vertical comb actuator and its applications,” J. Mi-cromech. Microeng., vol. 14, no. 2, pp. 235–241, 2004.
[22] O. Tsuboi, et al., “Rotational comb-driven micromirror with a large deflection angle and low drive voltage,” in Proc. Dig. IEEE MEMS, 2002, pp. 532–535.
[23] M. Wu and W. Fang, “Design and fabrication of MEMS devices using the integration of MUMPs, trench-refilled molding, DRIE and bulk sil-icon etching processes,” J. Micromech. Microeng., vol. 15, no. 3, pp. 535–42, 2005.
[24] M. J. Sidi, “A combined QFT/H design technique for TDOF uncer-tain feedback systems,” Int. J. Control, vol. 75, no. 7, pp. 475–489, 2002.