行政院國家科學委員會專題研究計畫 成果報告
機車路側淨空容忍度之研究
計畫類別: 個別型計畫 計畫編號: NSC93-2211-E-009-030- 執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立交通大學運輸科技與管理學系(所) 計畫主持人: 吳宗修 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 94 年 10 月 31 日
行政院國家科學委員會補助專題研究計畫
□
ˇ成 果 報 告
□期中進度報告
機車路側淨空容忍度之研究
計畫類別:
□
ˇ個別型計畫 □ 整合型計畫
計畫編號:NSC 92 - 2211 - E - 009 - 030 -
執行期間: 93 年 8 月 1 日至 94 年 7 月 31 日
計畫主持人:吳宗修
共同主持人:
計畫參與人員:林燦仁、劉智明
成果報告類型(依經費核定清單規定繳交):□
ˇ精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計
畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立交通大學
中 華 民 國 九十四 年 十 月 二十五 日
附件一機車路側淨空容忍度之研究 摘要 本研究目的在於瞭解機車騎士面臨不同道路線型與路側障礙物之下,其側向淨距與車速之改變。研 究利用實地觀測之方式,透過攝影機與雷射測速槍收集駕駛行為之相關資料,實驗地點分為三種不 同線型之道路,其中一地點為包含機車優先道之直線路段,另一地點為無機車優先道之直線與曲線 路段。在這三個測試路段之路側,分別放置機車與小汽車,藉以瞭解不同環境下,機車車速與側向 淨距之差異。結果顯示,當路側有停置汽車或機車障礙物時,曲線路段之側向淨距會顯著地大於直 線路段;在直線路段上,夜間之側向淨距會顯著地大於白天側向淨距,夜間之車速會顯著地高於白 天之車速;當目標車為重型機車或是目標車後座無乘客時,其車速會顯著地高於其他情況。 關鍵字:路側障礙物、側向淨距、駕駛行為 Abstract
The main purpose of this study is to investigate the change of lateral clearance and speed of motorcycles under various environmental conditions. Information of driving behavior using a video camera and a laser speed gun was collected. The experimental locations are three different roadways. One is the straight course with an exclusive motorcycle lane. The other two are the straight course and winding course both without exclusive motorcycle lanes. Parked motorcycles and passenger cars were set up on the roadside of these roadways to evaluate the differences of motorcycle speed and lateral clearance.
The result shows that the lateral clearance of the winding course will be significantly greater than the straight course. On the straight course, lateral clearance in the nighttime is greater than in the daytime. The nighttime speed is much higher than the daytime speed. Moreover, the speed of the heavy motorcycles and the ones without back-seat passengers is higher than other driving conditions.
Keywords: Roadside obstacles, Lateral clearance, Driving behavior
一、前言 近年來我國隨著經濟成長,社會環境快速地變遷,國人的生活品質不斷的提升,使得家戶私人 運具持有率日益提高,社會整體對運輸的需求也隨之增加。台灣地區地狹人稠,尤其是在人口密度 高、交通量龐大的都會地區,也因此發展出獨特的交通環境與特性,其中與國外交通特性最大的不 同之處,莫過於龐大的機車族群。根據交通部統計處的統計資料顯示[交通部網頁],截至民國九十 三年九月為止,我國台閩地區機車的持有數量共計約有一千三百多萬輛,為全世界機車密度最高之 地區,平均每1.62 人就擁有一輛機車,平均每戶擁有 1.92 部機車,且機車的持有數量每年仍以一 穩定之成長率持續成長中[內政部網頁]。由於機車具有經濟、操作簡便、機動性高及體積小之特性, 加上民眾使用習慣,儼然成為生活中不可或缺的重要交通工具。綜觀台灣之交通環境,道路設施對 於機車之考慮相當有限,並沒有提供機車駕駛者一良好之行車空間。在台灣,機車騎士的行車空間 往往受到侵犯[蕭,2002],如道路路邊經常有違規停車的情況,阻礙了慢車道的行駛路權,使得機車 只好駛入快車道與汽車爭道行駛,即使在有劃設機車專用道之道路上,路側空間也經常被停放的車 輛或是廣告招牌等障礙物所佔據,使得機車騎士的安全性受到相當程度的影響[張,2002]。基於以上
背景,本研究藉由實驗觀察之方式探討在不同道路線型之環境下,於路側停放不同大小之障礙物, 觀察並分析不同種類之障礙物對於行進中機車之駕駛行為是否有顯著之差異。 二、駕駛行為特性 構成交通的三要素為人、車、路。車輛與道路環境因素會直接影響駕駛者,駕駛者根據外界刺 激,透過心中的處理程序進行決策,再加上駕駛者本身的生理機能,進而達到控制車輛運作之目的, 同時與車輛、道路環境產生互動。駕駛者在行駛的過程中,其行為會受到道路幾何、線型以及周遭 環境所影響[Waard,1995],尤其是機車騎士,在駕駛過程中,更是容易受到路側障礙物而影響其駕 駛行為。本研究主要在於瞭解道路線型以及路側障礙物對機車駕駛行為之影響。 影響機車駕駛行為之因素可分為內在因素與外在因素兩類。內在因素包括駕駛人相關個人特性 (如性別、年齡等)、駕駛經驗與生理機能、車輛特性;外在因素包括道路幾何線型(直線、曲線)、 路側障礙物(停放車輛、廣告招牌)、鄰車影響(汽機車距離、車速)等。駕駛行為之討論主要可 分為外顯的表現面與內在的心理面兩大範疇,而本研究主要是針對駕駛者在實際道路上行駛時所呈 現之外顯行為表現為研究範圍。如下圖1 所示,粗線框起來之部分即為本研究的主要研究方向。 圖1 系統分析圖
三、實驗設計 實驗主要目的在於瞭解道路線型以及路側障礙物對機車駕駛行為之影響,故需針對研究中所考 量之變數種類、數目等安排一具結構化之設計,以利於樣本資料的收集與分析,並探討變數彼此間 之關係。 3.1 實驗目的 本研究對機車駕駛者之駕駛行為進行實地調查,觀測機車駕駛人分別在面對不同道路線型以及 不同路側障礙物時,其駕駛行為之改變。本研究實驗目的在於利用實驗設計之安排,在各種不同條 件下,分別取得研究所需的樣本資料,以利後續分析工作之進行。 3.2 實驗變數 在研究中所提及之各項變數,依照研究所需以及實驗所能完成之部分,首先決定所欲收集與進 行分析之變數,然後針對變數設計實驗。實驗中的變數主要分為下列兩種: 1. 自變數:本研究主要欲以不同之道路線型以及路側障礙物作為實驗的自變數,時間以及目 標車特性為次要影響變數。各自變數之操作定義如下表1。 2. 因變數:實驗中受到自變數影響之變數,在本研究中指的是駕駛者的駕駛行為,駕駛行為 有許多的衡量指標,由於本研究所探討的內容主要是針對機車駕駛者在駕駛過程中,為了 自身安全,避免撞擊到路側障礙物之情況下,目標車與路側障礙物所保持之距離,即側向 淨距。另外,目標車的車速亦可能會受到道路線型以及路側障礙物影響。故在實驗之因變 數方面,研究僅針對目標車之車速與側向淨距作為探討駕駛行為差異之指標。實驗因變數 如下圖2(直線路段)、圖 3(曲線路段): A. 車速:目標車在通過 A 點與 B 點之速度(Va,Vb) B. 側向淨距:目標車在通過 A 點與 B 點時與路側障礙物所保持之距離(Pa,Pb) 表1 實驗自變數之操作型定義 實驗變數 定義 道路線型 實驗路段為直線或是曲線、有無機車專用道 路側障礙物種類 可移動之路側障礙物,本研究以小汽車與機車為主 時間 白天或是夜晚 車種 目標車輛為輕型機車或是重型機車 後座有無乘客 目標車輛後座是否有乘客 本研究將機車行進之過程分為A 與 B 兩點進行觀察,A 點即車輛在一般不受路側障礙物影響之 環境下,所表現之正常駕駛行為;B 點則在路旁設置了障礙物,藉以影響機車駕駛之駕駛行為表現。 因此A、B 兩點間必須維持一足夠之距離,方可量測機車駕駛變換行進方向之動作,研究則將兩點 距離固定為50 公尺左右。 3.3 實驗方法 在各個不同線型之道路中,於路側放置不同種類之障礙物(如小汽車、機車等),以攝影機攝
錄及雷射測速槍測速,藉以收集該地點機車騎士之駕駛行為資訊。攝錄完成後,將DV 中的影像轉 換並存放於電腦硬碟中,再以人工判讀之方式,反覆播放觀看,萃取出實驗所需之資料,並加以記 錄,最後再利用統計軟體SAS 來進行統計分析。 由於實驗所收集的資料為在路段上所通行的機車,為了方便觀測其側向淨距與車速,需選取視 野良好之較高地點進行拍攝工作,另外考慮實驗是藉由架設錄影機以及使用測速槍來收集資料,需 於一穩定不受干擾之地點進行設置,故觀測地點應優先考量選取具有跨越式之公路橋樑或是人行陸 橋之道路路段作為實驗觀測地點。 ≥ 圖2 側向淨距示意圖 四、資料蒐集 4.1 路段選取 考量實驗觀測之便利性,實驗觀測地點選定為新竹市中華路四段之頂福人行陸橋以及新竹縣竹 東鎮竹林大橋上之東西向快速道路,分別觀測通過中華路四段以及竹林大橋之機車車流。 4.1.1 中華路四段 頂福人行陸橋位於新竹市中華路四段,包含直線與曲線路段,雙向四車道,有路肩,直線路段 路側有停車。實驗進行時,攝影機與實驗人員位於中華路上之頂福人行陸橋往下觀察中華路之機車 車流,進行攝影與資料收集。
4.1.2 竹林大橋 竹林大橋位於新竹縣竹東鎮朝陽路,為直線路段,雙向四車道,且有機車優先道與路肩,其上 有東西向快速道路跨越該橋,故進行實驗時攝影機與觀測人員將設置於東西向快速道路上,往下觀 察竹林大橋南北向之機車車流資料。 4.1.3 實驗地點比較分析 將前述之兩觀測地點之道路資料整理如下表2: 表2 觀測路段資料表 路段 特性 中華路(直線) 中華路(曲線) 竹林大橋 道路線型 直線 曲線(右彎) 直線 車道數 雙向四車道 雙向四車道 雙向四車道 機車專用道 無 無 有(1.9M) 路肩 有(4M) 有(4M) 有(1.4M) 路邊停車 有 無 無 實驗將以中華路直線路段為基礎,以中華路曲線路段比較直線與曲線間,駕駛行為之差異;並 以竹林大橋與中華路直線路段比較有無機車專用道,駕駛行為之差異。另外在中華路直線部分,加 入夜晚之實驗,以比較白天與夜晚間駕駛行為之差異。 ≥ 圖3 曲線路段置放障礙物示意圖
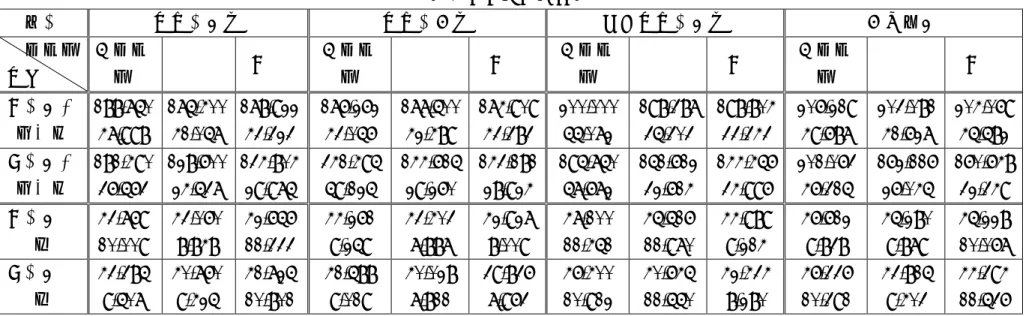
在白天部分,三個地點均分為無障礙物、障礙物為小汽車、障礙物為機車等三種情況,夜間部 份則僅於中華路直線部分進行實驗。為了方便不同地點之互相比較,障礙物之擺設位置將固定於一 適當位置,中華路之實驗障礙物擺放於路肩距離混合車道之車道線1.5 公尺處;竹林大橋之障礙物 則擺放於機車專用道與路肩上,與混合車道之車道線相距1.5 公尺。因小汽車與機車平行車道線停 放於路側時,其後照鏡會較主要車體稍微突出,故以車輛突出之後照鏡部分與車道線相距1.5 公尺 為實驗中障礙物的擺設位置(圖2、圖 3)。 表3 障礙物實驗情境表 中華路(曲線) 中華路(直線) 竹林大橋 白天 無 汽 機 無 汽 機 無 汽 機 夜晚 無 汽 機 中華路(直線) 中華路(曲線) 竹林大橋(機車道) 中華路(直線) 直線與曲線之差異 機車專用道之差異 白天與夜晚之差異 白天 夜晚 圖4 實驗設計組合圖 4.2 調查項目與方法 實驗調查項目包括,目標車在實驗路段行駛過程中,依序通過A、B 兩點,研究假設障礙物會 對目標車之駕駛行為產生影響,故需分別量測目標車在通過A、B 之車速與側向淨距,藉以分析該 目標車受到障礙物影響其駕駛行為之改變。 實驗過程中,一名人員位於人行陸橋或是跨越橋架設攝影機攝錄通過該實驗路段之機車車流, 另一名實驗人員則使用雷射測速槍進行車速資料之收集,並將所測得之車速資料以錄音之方式記錄 在攝影機中。待採集足夠之樣本資料後,於實驗室將數位攝影機所攝錄之影片轉錄至個人電腦上, 反覆播放實驗影片並利用人工判讀之方式萃取出實驗所需之車速、側向淨距、車種、有無乘客等資 料,加以記錄並輸入於電腦中,以便後續分析之用。 五、資料分析 將實驗中每個不同環境下所蒐集之樣本資料分群後,對目標車之車速與側向淨距進行變異數分 析,藉以判斷不同環境下之駕駛行為是否有顯著之差異。各地點資料分析完畢後,綜合整理如下表 4 至表 5。 1. 四個地點實驗結果均顯示,A 點位置在各種障礙物下,側向淨距無顯著差異;B 點在路側有障 礙物之情況下側向淨距會顯著小於無障礙物之情況。車速僅夜間中華路B 點位置無障礙物時會 高於有障礙物之情況,其他地點則均無顯著差異。
表4 調查結果綜合表 地點 中華路直線 中華路曲線 夜間中華路直線 竹林大橋 障礙物 指標 無障礙 物 機車 汽車 無障礙 物 機車 汽車 無障礙 物 機車 汽車 無障礙 物 機車 汽車 A 點之側 向淨距 188.750 (47.998) 175.400 (41.057) 178.922 (43.323) 176.262 (43.056) 177.500 (42.489) 174.909 (43.383) 200.000 (55.072) 198.387 (35.303) 198.804 (33.343) 206.219 (49.687) 203.081 (41.627) 204.069 (45.582) B 點之側 向淨距 181.490 (36.563) 128.600 (24.537) 134.804 (29.975) 341.495 (59.125) 144.615 (29.260) 143.181 (28.924) 195.750 (57.672) 151.612 (32.614) 144.456 (34.996) 201.063 (46.315) 162.116 (26.045) 160.648 (32.349) A 點之車 速 43.769 (10.009) 43.060 (8.848) 42.656 (11.333) 44.261 (9.259) 43.403 (7.887) 42.927 (8.009) 47.100 (11.451) 45.516 (11.970) 44.989 (9.214) 46.612 (9.838) 45.280 (9.879) 45.228 (10.067) B 點之車 速 43.385 (9.507) 40.760 (9.425) 41.725 (10.801) 41.588 (9.019) 40.028 (7.811) 39.836 (7.963) 46.400 (10.912) 40.645 (11.550) 42.434 (8.280) 46.336 (10.391) 43.815 (9.403) 44.394 (11.536) 註:表列為平均值,括號內為標準差。側向淨距單位為cm,車速為 km/hr。 表5 線型與時間之顯著性比較表 中華路直線 vs.中華路曲線 白天中華路直線 vs. 夜間中華路直線 中華路直線 vs. 竹林大橋 比較狀況 指標 無障礙物 機車 汽車 無障礙物 機車 汽車 無障礙物 機車 汽車 A 點之側向淨距 0.001** 0.720 0.501 0.149 0.001** 0.001** 0.009** 0.001** 0.001** B 點之側向淨距 0.001** 0.001** 0.040* 0.056 0.001** 0.042* 0.001** 0.001** 0.001** A 點之車速 0.711 0.770 0.842 0.041* 0.107 0.116 0.907 0.674 0.881 B 點之車速 0.161 0.548 0.151 0.051 0.940 0.606 0.970 0.966 0.925 *顯著;**極顯著
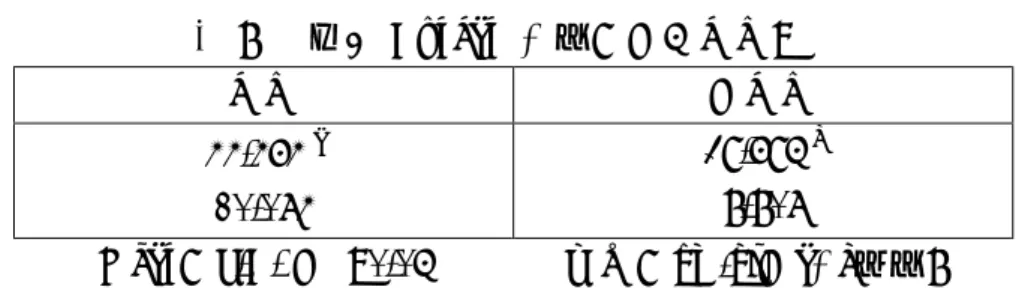
2. 由於中華路曲線路側平時無停放車輛,故 B 點在無障礙物之情況下,側向淨距會高出 其他地點許多,平均側向淨距為341 公分。 3. 中華路曲線部分在 B 點有放置障礙物時,側向淨距會顯著大於中華路直線部分;車速 則無顯著差異。 4. 夜間中華路直線路段在路側有障礙物時,側向淨距顯著大於白天中華路直線路段;相 對於白天,由於夜間道路環境之光線較昏暗,駕駛者較不易看清楚路側之障礙物,在 經過障礙物時,會保持一較大之側向淨距以安全通過該點。 5. 竹林大橋在 A、B 兩點之側向淨距均顯著大於中華路直線,車速則無顯著差異。 六、結論與建議 6.1 結論 由調查及觀測所得之資料分析,獲得以下結果: 1. 路側有無障礙物會顯著地影響機車駕駛之側向淨距;但是路側障礙物之種類對側向淨 距則無顯著差異。 A. 當路側有障礙物時,曲線路段之側向淨距會顯著地大於直線路段。 B. 在直線路段上,夜間之側向淨距會顯著地大於白天部分。 C. 路肩寬度較寬之道路,其側向淨距會顯著地大於較窄之道路。 2. 無路邊障礙物的情況下,夜間之車速會顯著地高於白天之車速。 3. 當目標車為輕型機車時,其側向淨距顯著地小於重型機車;車速亦顯著地低於重型機 車。(表 6、表 7) 4. 目標車車輛後座有無乘客,僅對車速有顯著影響,對側向淨距則無。(表 8) 表6 側向淨距之 Duncan 分群(車種) 輕型機車 重型機車 160.017 a (35.848) 179.768 b (40.898) Mean(S.D.),α=0.05 單位:cm,a, b為群別 表7 車速之 Duncan 分群(車種) 輕型機車 重型機車 38.855 a (7.637) 44.575 b (10.352) Mean(S.D.),α=0.05 單位:km/hr,a, b為群別
表8 車速之 Duncan 分群(有無乘客) 乘客 有乘客 44.464 a (10.074) 39.695 b (8.807) Mean(S.D.),α=0.05 單位:km/hr,a, b為群別 6.2 建議 針對研究成果與實驗過程中所面臨之困難與限制,提出以下幾點建議以供後續研究之 參考。 1. 不同線型對駕駛行為有顯著之影響。未來可考慮不同轉彎半徑之路段,以比較其駕駛 行為之差異程度。 2. 路側障礙物對駕駛行為有顯著影響。未來亦可考量擺放其他種類之障礙物,或是將障 礙物擺放於不同位置上。 3. 本研究為了簡化實驗,故不將鄰車之影響納入變數中,建議將來研究可考慮將鄰車影 響列入考慮,以觀察鄰車對駕駛行為之影響。 4. 由於實驗係以拍攝之方式進行資料收集,無法得到駕駛人本身之特性,未來若有足夠 之時間及人力,建議可將駕駛人之個別差異(如性別、年齡等)納入實驗變數中。 參考文獻 交通部網頁 http://www.motc.gov.tw 內政部網頁 http://www.moi.gov.tw 張新立、吳舜丞、楊家銘(2002),「我國機車管理政策之回顧與展望」,九十一年道路 交通安全與執法研討會論文集,頁147-157。 蕭貴賓(2002),「台灣地區機車路權推動策略之研究─台北市個案分析」,台北大學公 共行政暨政策學系碩士論文。
D. De Waard, M. Jessurun, F. J. J. M. Steyvers, P. T. F. Raggatt and K. A. Brookhuis (1995), “Effect of road layout and road environment on driving performance, drivers’ physiology and road appreciation”, Ergonomics, Vol. 38, pp. 1395-1407.
D. De Waard and F. J. J. M. Steyvers (2000), “Road-edge delineation in rural areas: effects on driving behavior”, Ergonomics, Vol.43, pp. 223-238.
計畫成果自評 從本研究實驗結果得知,路側有無障礙物會顯著地影響機車駕駛之側向淨距;但是路 側障礙物之種類對側向淨距則無顯著差異。夜間之車速會顯著地高於白天之車速。當目標 車為輕型機車時,其側向淨距均顯著地小於重型機車;車速亦顯著地低於重型機車。目標 車車輛後座有無乘客,僅對車速有顯著影響,對側向淨距則無。結論具體。 本研究內容依照原訂計畫目的執行,其內容與原計畫完全相符,唯在觀測路段中之道 路線型,因受限於研究時間與人員,故無法以不同轉彎半徑之路段比較其駕駛行為之差異 程度。 依據本計畫成果所撰寫之論文,受邀請於中華民國第五屆機車交通與安全研討會中口 頭報告,並收錄全文於研討會論文集中。