期末報告
專家社群網絡上的團隊形成與團隊績效預測
計 畫 類 別 : 個別型計畫 計 畫 編 號 : NSC 102-2221-E-004-007- 執 行 期 間 : 102 年 08 月 01 日至 103 年 07 月 31 日 執 行 單 位 : 國立政治大學資訊科學系 計 畫 主 持 人 : 沈錳坤 計畫參與人員: 碩士班研究生-兼任助理人員:蘇瀚 碩士班研究生-兼任助理人員:徐嘉泰 碩士班研究生-兼任助理人員:楊元翰 碩士班研究生-兼任助理人員:周冠嶔 處 理 方 式 : 1.公開資訊:本計畫涉及專利或其他智慧財產權,2 年後可公開查詢 2.「本研究」是否已有嚴重損及公共利益之發現:否 3.「本報告」是否建議提供政府單位施政參考:否中 華 民 國 103 年 11 月 10 日
中 文 摘 要 : 團隊形成是現代組織理論中重要的議題。成功的團隊不僅仰 賴團隊成員的能力,也取決於團隊成員的合作關係。換句話 說,給定任務所需求的能力,在組織團隊時,所邀集的團隊 成員不僅必須具備需求能力,同時成員彼此之間也必須能溝 通合作。因此本計劃研究專家社群網絡上的團隊形成。給定 一個專家社群網絡,其中每個節點代表擁有技能的專家、每 個邊代表專家之間的溝通成本,團隊形成的問題就是從中找 到候選專家,不僅符合任務所需的能力要求,而且候選專家 間的溝通成本越低越好。本計劃延伸基本的團隊形成問題, 將每個需求能力所需的最少專家數列入考慮。我們研究有效 率的延伸團隊形成演算法。我們以 DBLP 的資料實驗證實我們 所提出的演算法無論在效率與效果上都有較好的表現。 中文關鍵詞: 團隊形成、社群網絡、合作網絡、專家查詢
英 文 摘 要 : Team formation is essential in the field of
organization theory. A successful project relies on not only the expertise of participated members but also on the communication and collaboration between them. In other words, to form a team of experts for a given task consisting of some skills, it is critical to find a set of persons whose professional skills satisfy the requirement of given task and are able to communicate effectively with each other. This project investigates the team formation problem. Given a social network in which each vertex represents an expert in some skills and each weighted edge
indicates the communication cost, the team formation problem is to find some experts from these candidates to meet the requirement of a given task and minimize the total communication cost. This project
generalizes the basic team formation problem by considering the minimum number of experts required for each skill. Moreover, based on the team formation algorithm, this project investigates the context-based people search for social network service which aims at finding an individual not only by the name of the target, by also by the social contexts of the target. Experimental results on the DBLP network show that the teams composed by the proposed methods have better performance in both effectiveness and
!
!...!I! !...!II! Abstract!...!III! 1.! Introduction!...!1! 2.! Related!Work!...!2! 3.! Problem!definition!...!4! 4.! Generalized!Enhanced@Steiner!algorithm!...!5! 5.! Better!initial!node!selection!strategy!...!6! 6.! Grouping@based!approach!to!team!formation!...!7! 7.! Evaluation!...!10! 8.! Conclusion!...!16! References!...!17!II
III
A
BSTRACT!
Team formation is essential in the field of organization theory. A successful project relies on not only the expertise of participated members but also on the communication and collaboration between them. In other words, to form a team of experts for a given task consisting of some skills, it is critical to find a set of persons whose professional skills satisfy the requirement of given task and are able to communicate effectively with each other. This project investigates the team formation problem. Given a social network in which each vertex represents an expert in some skills and each weighted edge indicates the communication cost, the team formation problem is to find some experts from these candidates to meet the requirement of a given task and minimize the total communication cost. This project generalizes the basic team formation problem by considering the minimum number of experts required for each skill. Moreover, based on the team formation algorithm, this project investigates the context-based people search for social network service which aims at finding an individual not only by the name of the target, by also by the social contexts of the target. Experimental results on the DBLP network show that the teams composed by the proposed methods have better performance in both effectiveness and efficiency.
1
1.
I
NTRODUCTIONTeam formation is an important research topic in the area of organization theory [4, 5, 9, 10]. A successful project not only relies on the expertise of the participated members but also hinges on the effectiveness of communication and collaboration among them. In other words, to form an effective team of experts for a given task or project, it is critical to ensure the team members possess the professional skills that satisfy the required expertise and have excellent communication manners to effectively work together.
Given a collaborative social network, the formation of a team aims to find a crew of experts for a given task requiring a set of specific skills. A collaborative social net- work consists of a pool of candidates, in which each candidate is an expert possessing some skills, with their existing collaboration relationships. In addition, there is a weight assigned for each collaboration link to indicate the communication cost between the connected experts according to their previous collaborations. A lower weight indicates easier, smoother and more effective collaboration between such two experts. As a result, the team formation problem aims at finding a set of experts from these candidates to meet the requirement of a given task and to minimize the total communication cost between the team members.
For example, assume that a project leader aims to organize a team from a pool of six candidates, P = {1, 2, 3, 4, 5, 6}, for a given task requiring four distinct skills, R = {s1 , s2 , s3 , s4 }. Each candidate i is an expert of a set of skills X i where X 1 = {s4 }, X 2 = {s1 }, X 3 = {s1 , s3 }, X 4 = {s1 , s4 }, X 5 = {s2 }, and X 6 = {s3 }. Also assume that there exists a social network connecting these experts, as shown in Fig. 1a. In Fig. 1a, bold lines indicate previous collaborations between the candidates while the edge weights stand for the communication costs between them. To form a team that meets the given task without considering the communication cost, we find four teams that satisfy the expertise requirement: T1 = {1, 2, 3, 5}, T2 = {1, 2, 5, 6}, T3 = {3, 4, 5}, and T4 = {4, 5, 6}. However, if the communication cost is considered, T4 = {4, 5, 6} becomes the best choice since the communication cost among its members is the smallest. The communication cost of T4 is 0.3 and that of T3 is 0.6, while both T1 and T2 are considered as invalid because the social network of the team members consists of disconnected components; meaning there is no previous collaboration between the team members.
The team formation problem is first proposed by Lappas et al. [14], who attempted to exploit the collaboration social network with the communication costs between the members to organize a team for a given task. However, they failed to meet the requirement of having a specific number of experts for each skill required in the task. In the rest of the report, we treat Lappas et al.’s setting as the basic task. In real-life situations, it is likely that more than one expert is demanded for some skills when composing a team for a specific task.
Figure. 1 ( a) A collaborative social network. (b) An enhanced graph, where nodes with black color are
experts and those with white color are skills.
To meet the real-life requirement, we propose to generalize the team formation problem by allowing specification of the minimum required number of experts for each skill. Specifically, the team formed must satisfy the following conditions. (1) Its members possess all the required skills in the expertise query. (2) For each required skill, the team contains at least the specified number of experts. (3) The total communication cost between team members should be as low as possible. We regard such task as the generalized team formation. For example, in Fig. 1a, if a given task requires forming a team with two experts with skill s1 , one expert with skill s3 and one expert with skill s4, T5 = {3, 4} is the best team with the lowest
2
communication cost of 0.4.
Lappas et al. [14] have proved that the team formation problem is NP-hard. By defining the communication cost as the sum of edge weights in the minimum spanning tree that connects the chosen experts, they propose two approximation methods, Cover-Steiner and Enhanced-Steiner algorithms, to solve the team formation problem for basic tasks.
We propose two novel methods to solve the generalized team formation tasks based on the existing Enhanced-Steiner algorithm. First, we modify the Enhanced-Steiner algorithm to deal with the generalized tasks. In addition, rather than selecting a seed node randomly as in the original Enhanced-Steiner algorithm, we devise a density-based seed selection strategy by considering the potential interactions between experts with the required skills and embed it into the Steiner algorithm. Second, we propose a novel grouping-based method to compose the team for generalized tasks. Our grouping-based method condenses experts in the collaborative social network to a group graph structure based on the required skills. To satisfy the required skills with specified numbers, we develop a role composition algorithm to extract the final collaborative subgraph of the team by connecting experts based on the group roles of individuals (i.e., within and between groups). The proposed methods are evaluated on five effectiveness measures and the time efficiency.
The remainder of this report is organized as follows: In Sect. 2, we have a full review and summary about relevant literatures. The problem definition and notations are described in Sect. 3. Section 4 describes the generalized Enhanced-Steiner algorithm. Then, we propose the density-based measure to improve the generalized Enhanced-Steiner algorithm in Sect. 5. In Sect. 6, we propose the group-based team formation method. Section 7 exhibits experimental results, while Sect. 8 concludes this report.
2.
R
ELATEDW
ORKExisting works related to this report can be divided into three categories: team formation, social group planning, and connection subgraph discovery.
2.1 Team formation
The team formation problem is extensively studied in the field of operations research. Wi et al. [26] solve the team formation problem by modeling it as an integer programming problem to find an optimal match between individuals and requirements. Fitzpatrick et al. [9] evaluate individuals’ drive and temperament to assess the quality of a team. Chen and Lin [5] estimate the interpersonal attributes of experts from the psychological view when arranging experts. However, the collaboration between experts is neglected. Gaston et al. [10] study the potential correlation between the expertise network structures and the team performance. However, they neither take it as a computational problem nor propose a method to compose a team. Cheatham and Cleereman [4] simply collects the neighboring individuals surrounding each skill in a social-concept graph to form the team. Agustín-Blas et al. [1] aim to partition a staff-resource matrix such that the staff members in each team/group have maximum knowledge about the resources in the corresponding team/group. However, these works do not consider the social relationships and the communication cost between individuals.
C.-T. Li et al.
the potential correlation between the expertise network structures and the team performance. However, they neither take it as a computational problem nor propose a method to compose a team. Cheatham and Cleereman [4] simply collects the neighboring individuals surrounding each skill in a social-concept graph to form the team. Agustín-Blas et al. [1] aim to parti-tion a staff-resource matrix such that the staff members in each team/group have maximum knowledge about the resources in the corresponding team/group. However, these works do not consider the social relationships and the communication cost between individuals.
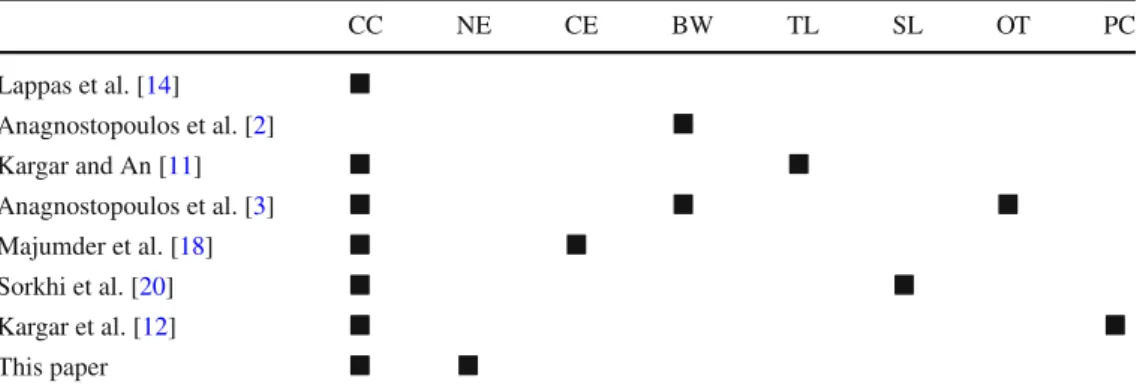
Lappas et al. [14] is the first to solve the team formation problem by combining both the social network and the communication cost between experts. They propose two approxima-tion methods, Cover-Steiner and Enhanced-Steiner algorithms, to solve the basic task team formation problem. Experimental results showed that Enhanced-Steiner outperforms Cover-Steiner. Lappas’ work opens up the opportunity for data miners to investigate how to form effective teams of experts with a variety of user requirements. Anagnostopoulos et al. [2] design a fitness function to assign tasks to experts when forming the teams. In particular, they consider the balance of workload of experts to have the fair task assignment. Their follow-up work [3] extends such framework by integrating the social collaborations between experts and allows tackling multiple online tasks concurrently. Kargar and An [11] propose to find top-k teams of experts with the specification of team leaders. Majumder et al. [18] impose the capacity constraints which ensure that no experts are assigned tasks beyond his/her capacity values in the team formation problem. Sorkhi et al. [20] compose teams of experts by min-imizing the communication cost with the consideration that different experts have diverse levels of skillfulness. Kargar et al. [12] assume each expert should be associated with a mon-etary weight to represent his/her personal cost for professional networking. They present the bi-objective team formation by minimizing both the communication cost and the personal cost of the project. We give a summary about social network-based team formation, as shown in Table1. Some abbreviations of aspects are denoted: communication cost (CC), number of skilled experts (NE), capacity on experts (CE), balance of workload (BW), team leader (TL), skillfulness level of experts (SL), online multiple tasks (OT), and personal cost (PC). A marked cell indicates that the paper tackles the corresponding aspect.
Since one of our proposed methods extends from the Enhanced-Steiner algorithm [14], we describe more about its details below. The Enhanced-Steiner algorithm consists of two steps. The first step constructs an enhanced graph which enhances the collaborative social network by adding skill nodes and edges connecting each skill node to individuals who possess such skill. An example is shown in Fig.1b. The second step aims to find a Steiner tree that densely
Table 1 Summarizing the differences between this paper and the recent advances about social network-based
team formation in eight aspects
CC NE CE BW TL SL OT PC Lappas et al. [14] ! Anagnostopoulos et al. [2] ! Kargar and An [11] ! ! Anagnostopoulos et al. [3] ! ! ! Majumder et al. [18] ! ! Sorkhi et al. [20] ! ! Kargar et al. [12] ! ! This paper ! !
123
Author's personal copy
3
network and the communication cost between experts. They propose two approximation methods, Cover-Steiner and Enhanced-Steiner algorithms, to solve the basic task team formation problem. Experimental results showed that Enhanced-Steiner outperforms Cover-Steiner. Lappas’ work opens up the opportunity for data miners to investigate how to form effective teams of experts with a variety of user requirements. Anagnostopoulos et al. [2] design a fitness function to assign tasks to experts when forming the teams. In particular, they consider the balance of workload of experts to have the fair task assignment. Their follow-up work [3] extends such framework by integrating the social collaborations between experts and allows tackling multiple online tasks concurrently. Kargar and An [11] propose to find top-k teams of experts with the specification of team leaders. Majumder et al. [18] impose the capacity constraints which ensure that no experts are assigned tasks beyond his/her capacity values in the team formation problem. Sorkhi et al. [20] compose teams of experts by minimizing the communication cost with the consideration that different experts have diverse levels of skillfulness. Kargar et al. [12] assume each expert should be associated with a monetary weight to represent his/her personal cost for professional networking. They present the bi-objective team formation by minimizing both the communication cost and the personal cost of the project. We give a summary about social network-based team formation, as shown in Table 1. Some abbreviations of aspects are denoted: communication cost (CC), number of skilled experts (NE), capacity on experts (CE), balance of workload (BW), team leader (TL), skillfulness level of experts (SL), online multiple tasks (OT), and personal cost (PC). A marked cell indicates that the paper tackles the corresponding aspect.
Since one of our proposed methods extends from the Enhanced-Steiner algorithm [14], we describe more about its details below. The Enhanced-Steiner algorithm consists of two steps. The first step constructs an enhanced graph which enhances the collaborative social network by adding skill nodes and edges connecting each skill node to individuals who possess such skill. An example is shown in Fig. 1b. The second step aims to find a Steiner tree that densely connects the required skills in the enhanced graph. Given a graph G = (V, E), a required set of vertices R ⊆ V , a Steiner tree is a connected and acyclic subgraph of G which spans all vertices of R with the minimum cost. To find a Steiner tree, many algorithms are proposed. Lappas et al. [14] present a greedy heuristic algorithm shown in Algorithm 0. The algorithm starts by selecting a skill node randomly from the enhanced graph (line 2). Then, each round of the algorithm finds the skill node possessing the minimum distance to the set of nodes which have added to the solution (line 4). All the nodes along the shortest path from this skill node to the nodes in current solution are added to the new solution set as well (line 5 & 6).
On team formation with expertise query in collaborative social networks
connects the required skills in the enhanced graph. Given a graph G = (V, E), a required set of vertices R ⊆ V , a Steiner tree is a connected and acyclic subgraph of G which spans all vertices of R with the minimum cost. To find a Steiner tree, many algorithms are proposed. Lappas et al. [14] present a greedy heuristic algorithm shown in Algorithm 0. The algorithm starts by selecting a skill node randomly from the enhanced graph (line 2). Then, each round of the algorithm finds the skill node possessing the minimum distance to the set of nodes which have added to the solution (line 4). All the nodes along the shortest path from this skill node to the nodes in current solution are added to the new solution set as well (line 5 & 6).
2.2 Social group planning
Social group planning, whose goal is similar to team formation, aims at recommending a set of individuals who satisfy various requirements for a real-world activity or event. Sozio and Gionis [21] are the first to point out such problem in the context of social network mining. They define and solve a Community-Search Problem, which aims to find a group of individuals densely connected to a given set of persons. Assuming that each individual has a list of available time slots [27], propose Social-Temporal Group Query to find the most suitable activity time and the attendees with the minimum total social distance to the initiator. Considering that each individual is associated with a geospatial location [28], further propose Socio-Spatial Group Queryto select a group of nearby attendees with tight social relation. Based on similar settings [17], propose Circle of Friend Query to find a set of friends who are close to each other in both spatial and social aspects. On the other hand, assuming that each person is associated with a set of attributed labels (e.g. name, interests, age, sex, school) [15], present Context-based People Search to identify who the users would like to find according to the given context labels. Li and Shan [16] further develop the Activity Composter system to facilitate users for initializing, inviting, and suggesting suitable friends to attend different kinds of social events or activities, such as cocktail party, study group, and group buying. 2.3 Connection subgraph discovery
Given a set of nodes, the connection subgraph discovery problem is to find a subgraph with the best connections between the query nodes. Its objective is similar to the team formation problem except for that each node is not associated with a set of skills. Faloutsos et al. [8] are the first to find the connection subgraph for a pair of nodes. The most well-known approach is the Random Walk with Restart (RWR) [22], which measures the proximity between nodes. Work well with a variety of input requirements, including allowing AND/OR constraints [23],
123
Author's personal copy
2.2 Social group planning
Social group planning, whose goal is similar to team formation, aims at recommending a set of individuals who satisfy various requirements for a real-world activity or event. Sozio and Gionis [21] are the first to point out such problem in the context of social network mining. They define and solve a Community-Search Problem, which aims to find a group of individuals densely connected to a given set of persons. Assuming that each individual has a list of available time slots [27], propose Social-Temporal Group Query to find the most suitable activity time and the attendees with the minimum total social distance to the initiator. Considering that each individual is associated with a geospatial location [28], further propose Socio-Spatial Group Query to select a group of nearby attendees with tight social relation. Based on similar settings [17], propose Circle of Friend Query to find a set of friends who are close to each other in both spatial and social aspects. On the other hand, assuming that each person is associated
4
with a set of attributed labels (e.g. name, interests, age, sex, school) [15], present Context-based People Search to identify who the users would like to find according to the given context labels. Li and Shan [16] further develop the Activity Composter system to facilitate users for initializing, inviting, and suggesting suitable friends to attend different kinds of social events or activities, such as cocktail party, study group, and group buying.
2.3 Connection subgraph discovery
Given a set of nodes, the connection subgraph discovery problem is to find a subgraph with the best connections between the query nodes. Its objective is similar to the team formation problem except for that each node is not associated with a set of skills. Faloutsos et al. [8] are the first to find the connection subgraph for a pair of nodes. The most well-known approach is the Random Walk with Restart (RWR) [22], which measures the proximity between nodes. Work well with a variety of input requirements, including allowing AND/OR constraints [23] providing interactive feedback with users [24], querying a small graph describing the desired relationships between entity types [25], the RWR approach is considered a very effective approach to extract the diverse kinds of best connection subgraphs. More recently, a Steiner tree-based approximation algorithm, STAR [13], is proposed to find the connection subgraph in multi-relational graphs. Cheng et al. [7] consider the community structure with the modularity measure to discover the connection subgraphs. They also propose a correlation index to find the groups that the query nodes belong to, as well as the best connection structure among groups [6].
3.
P
ROBLEM DEFINITIONDefinition 3.1 Let A = {a1, . . . ,am} be a universe of m skills, a collaborative social network is an undirected and weighted graph G = V ,E ) with each node i in V = {1, . . . , n} being an individual who possesses a set of skills Xi ⊆ A and each edge (i, j ) in E representing the collaboration relationship between two individuals. The weight assigned on each edge (i, j ) stands for the communication cost between individuals i and j .
Note that edges with lower weight values represent better collaborations between two individuals and vice versa. For example, in the coauthorship network, if two researchers coauthor more papers together, the weight on the edge connecting the two authors would be lower assuming they will work more efficiently together than two authors who have never worked together before.
Definition 3.2 A generalized task R = (S, K ) consists of a set of required skills,{(si , ki)|∀i, 1 ≤ i ≤ q , si A, ki is an integer}, where ki denotes the minimum required number of experts for skill si and q is the number of required skills. Note that if ki = 1(∀i, 1 ≤ i ≤ q ), the expertise query is reduced to the basic task.
Definition 3.3 Given a collaborative network G = (V, E) and V’ ⊆" V, the communication cost of V’ is defined as the sum of edge weights in the minimum spanning tree of the induced subgraph G [V’], denoted by CC (V’).
Note that our definition of communication cost follows the approach of [14]. In fact, there are various ways to define the communication cost based on the pairwise distances between team members in the social graph. For example, the diameter cost [18] is defined by the largest shortest distance between any two nodes in the discovered subgraph. The sum-of-distances cost [11] is defined by the sum of the shortest distances between the experts possessing the pair of skills. In practice, the effect of using the pairwise distance-based measures on team formation is verified to exhibit similar tendency and results, as evidenced by Kargar and An [11]. What we choose (i.e., the Steiner cost) is the one that commonly used by all the team formation works [2, 3, 11, 14, 18]. Besides, it can be observed that according to such pairwise distances, assuming that the cost between node i and j is wi j and the cost between j and k is wjk , the cost between i and k equals to one of the following three cases:
(a) costik = wi j +wjk , if there is no direct link between i and k,
(b) costik = wik < wi j +wjk , if the direct link between i and k possesses the lowest cost, and
(c) costik = wi j + wjk < wik,if there exists a direct link between i and k but the corresponding weight wik is not the shortest distance between i and k.
In case (c), it is reasonable because the collaboration or communication between i and k would be better through the coordination of node j .
5
Problem Definition Given a collaborative social network G = (V , E ) and a generalized task R = (S, K ), the team formation problem for the generalized task is to find a set of individuals V ⊆ V which forms an induced subgraph G [V’] such that
(1) ∀(si , ki ) ∈ R, si ⊆ ∪ j V’ X j ,
(2) ∀(si , ki ) ∈ R, ki ≤|{ j | j ∈ V’and si ∈ X j } , and (3) The communication cost CC(V’) is minimized.
Theorem 1 The generalized team formation problem is NP-hard.
Proof We prove the theorem by a reduction from the Group Steiner Tree (GST) problem [19]. In the decision version of the GST problem, we are given an undirected graph G = (V, E ), a cost function c : E → R, a constant δ, and k subsets of nodes {g1, . . . , gk}, in which gi ⊆ V , i {1, . . . , k}. We are asked to find a subtree G’ = (V’,E’ ) of G = (V,E ), V’ ⊆ V , E’ ⊆ E , such that V’ ∩ gi = ∅ and the cost Σe V’, c(e) < δ.
Now we are transforming an instance of the Group Steiner Tree problem to an instance of our generalized team formation problem as follows. We associate each subset gi in the GST with a skill s j . The expertise query of the task R aims to satisfy not only the skills abut also the number of experts of each required skill, specifically, R = {(s1 , k1), . . . , (sq , kq)}. We know that if our problem is solved, it is natural that the corresponding basic team formation problem, which targets at satisfying R = {(s1, 1), . . . , (sq, 1)}, is
also solved. However, it is not true the other way around. That is, if the basic team formation is NP-hard, the generalized version is NP-hard as well.
For each node v V in the GST problem, we create an expert iv with a set of skills X v = {si |v gi }. The graph in the generalized team formation problem, with the number of required skills equal to 1, can be mapped into a GST problem, in which the cost function c is defined as the sum of edge weights in the generalized team formation instance of the GST problem. Then it is easy to conclude the GST has a solution if and only if a solution also exists for the generalized team formation problem. The problem is proved to be NP.
4.
G
ENERALIZEDE
NHANCED-S
TEINER ALGORITHMThe Enhanced-Steiner algorithm [14] was proposed to solve the original team formation problem (i.e., the basic task). In this section, we modify this algorithm to deal with the generalized tasks. The generalized Enhanced-Steiner algorithm is regarded as a novel and strong baseline in the evaluation. To describe this algorithm, some definitions are given in advance.
Definition 4.1 Given two nodes i, j V , the distance dist(i, j) between two nodes i and j is the sum of edge
weights along the shortest path. Meanwhile, path(i, j) is the sequence of nodes along the shortest path.
Definition 4.2 The distance between a node i and a set of nodes V’ is defined as dist(i,V’) = min j V’
dist(i,j). Likewise, path(i,V’) is the set of nodes along the shortest path from i to j .
Based on these two definitions, Algorithm 1 incrementally finds and adds selected team members into the solution set. In the algorithm, two sets of nodes, U and V’, are maintained. U contains the skill nodes that have yet to be satisfied in terms of the number of experts needed. V’ is the current solution set which contains the selected expert nodes. The algorithm repeats several rounds until the number of experts for each required skill is sufficient (line 4). At each round, a skill node v* from U that has the minimum distance to V’ is selected (line 7). Then the number of required experts for the skill represented by node v* is decreased by one (line 9). Moreover, for each node j along the shortest path pat h(v*, V’), if j possesses a required skill w and is not yet added into V’, the required number of experts for w is decreased by one (line 10 & 11), and all the nodes along the shortest path from v* to V’ are added to the solution set V’ (line 12).
6
C.-T. Li et al.
several rounds until the number of experts for each required skill is sufficient (line 4). At each round, a skill node v∗from U that has the minimum distance to V"is selected (line 7). Then the number of required experts for the skill represented by node v∗is decreased by one (line 9). Moreover, for each node j along the shortest path path(v∗,V"), if j possesses a required skill w and is not yet added into V", the required number of experts for w is decreased by one (line 10 & 11), and all the nodes along the shortest path from v∗to V"are added to the solution set V"(line 12).
The expected running time of this generalized Enhanced-Steiner tree algorithm is similar to the original Enhanced-Steiner Algorithm. The time complexity of the original algorithm is O(ns× |E|), where nsis the number of required skill nodes. The difference between the
original and generalized versions lies in the number of times the main while loop is executed (Line 4–13). In the worst case, the while loop has to be executed up to nptimes, where np
is the total number of desired experts of all required skills, np = !i=1...qki, where ki is
the required number of experts for skill si. Therefore, the worst-case time complexity of the
generalized algorithm is O(np× |E|).
5 Better initial node selection strategy
Both the original Steiner algorithm and the proposed generalized Enhanced-Steiner algorithm start from selecting a skill node randomly from the enhanced graph. Instead of selecting a seed node randomly, in this section, we propose a more effective strategy to select the seed node based on the neighborhood structure of skill nodes. This comes from the observation that the higher the neighborhood density of a skill node, the better chance it is involved in a lower-cost communication subgraph, since such skill node could have shorter distances to other nodes when traversing the enhanced graph. To achieve this goal, we propose the ε-neighborhood density by the following definitions.
123
Author's personal copy
The expected running time of this generalized Enhanced-Steiner tree algorithm is similar to the original Enhanced-Steiner Algorithm. The time complexity of the original algorithm is O(ns × |E |), where ns is the number of required skill nodes. The difference between the original and generalized versions lies in the number of times the main while loop is executed (Line 4–13). In the worst case, the while loop has to be executed up to np times, where np is the total number of desired experts of all required skills, np =Σi=1..qki, where ki is the required number of experts for skill si. Therefore, the worst-case time complexity of the generalized algorithm is O(np × |E|).
5.
B
ETTER INITIAL NODE SELECTION STRATEGYBoth the original Enhanced-Steiner algorithm and the proposed generalized Enhanced- Steiner algorithm start from selecting a skill node randomly from the enhanced graph. Instead of selecting a seed node randomly, in this section, we propose a more effective strategy to select the seed node based on the neighborhood structure of skill nodes. This comes from the observation that the higher the neighborhood density of a skill node, the better chance it is involved in a lower-cost communication subgraph, since such skill node could have shorter distances to other nodes when traversing the enhanced graph. To achieve this goal, we propose the ε-neighborhood density by the following definitions.
Definition 5.1 Given two nodes v, w V, the length l(v, w) between nodes is defined as the number of
edges in the shortest path between v and w.
Definition 5.2 The ε-neighborhood of a node v V, is defined as the set of nodes Nε(v) = {wi |1 ≤ l(v, wi ) ≤ ε, wi V }.
Definition 5.3 Given a set of nodes U ⊆ V , the density of U is defined as Density(U) = 2|{eij | eij E, vi, vj U}/(|U|× (|U−1|)).
In other words, the density of U is the ratio of the number of edges between each pair of nodes in U to the maximal possible number of edges.
Definition 5.4 The ε-neighborhood density of a node v V is defined as Density(Nε(v)), where Nε(v) is v’s ε-neighborhood.
Consequently, line 2 of Algorithm 1 can be improved by selecting a seed skill node with the highest density. Let us take Fig. 1 for example again: the 2-neighborhood densities of s1, s2, s3, and s4 are 0.33, 1.0,
0.67, and 0.33, respectively. Starting from s2 (s3, s4), the solution is {4, 5, 6} with communication cost 0.3
7
Using the ε-neighborhood density to improve the effectiveness of the generalized Enhanced-Steiner algorithm, the time complexity only increases slightly to O (|R|+ np×|E|)), since we need to compute the density of each skill node before entering the while loop. Since |R| is much small than |E|, the worst-case time complexity is approximated to be O(np × |E|).
6.
G
ROUPING-
BASED APPROACH TO TEAM FORMATIONThe generalized Enhanced-Steiner algorithm suffers from poor efficiency when the user- specified task consists of too many skills or when the collaborative social network contains too many individuals and collaboration relationships. To address such issue, we propose a grouping-based method for generalized team-formation tasks.
The central idea of the grouping-based approach is to aggregate the raw collaborative net- work into a compact structure, called the group graph, which keeps only relevant individuals and potential interactions between the groups for the required skills. Group graph is able to boost the time efficiency because it reduces the search space. Moreover, as shown in the evaluation section, the group graph is proved to be capable of guiding the graph traversals to avoid redundant communication cost and decrease the cardinality of the compiled team.
Our grouping-based method consists of four stages. The first is skill-based individual grouping, which collects individuals possessing the same required skills into groups. The second is constructing the group graph, in which linkages capture the individuals’ interactions between groups. In the third stage, we apply the modified Enhanced-Steiner algorithm on the group graph, to discover the subgraph of groups which strongly connects the required skills. Finally, a role composition algorithm is developed to finalize the team satisfying both required skills and the corresponding specified number of experts.
6.1 Skill-based individual grouping
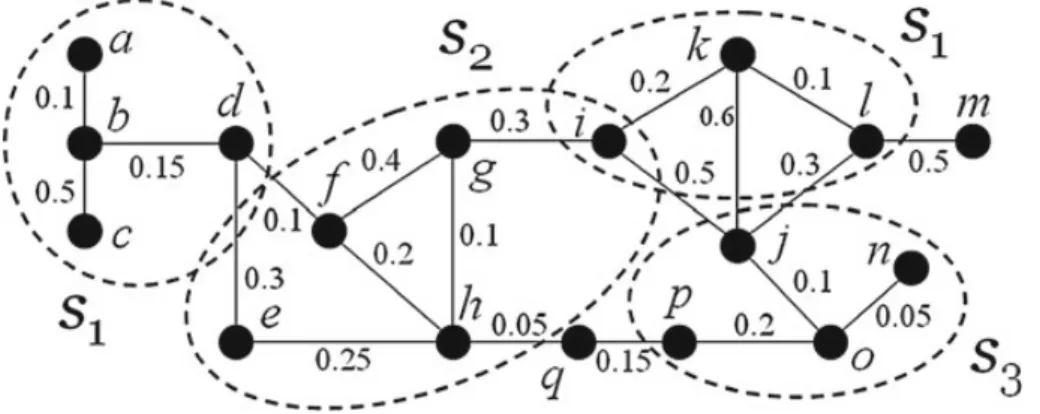
The first step is to group individuals in the collaborative network according to the required skills. A group, with respect to one of the required skills, say si, is a connected subgraph in which each individual node possesses the skill si . Figure 2 shows an example of the skill-based grouping for the required skills s1 , s2,
and s3. Each group is enclosed by a dotted circle. It can be observed that there are two groups correspond to skill s1. The two groups are separated components since individuals in them have no past collaborations. Besides, node i belongs to two groups because i is skilled in both s1 and s2. Node m does not belong to any
groups, because m contains no required skills and thus will not be considered for further processing.
In general, most of individuals in the network tend to be good at more than one skill. Therefore, generated groups overlap with each other. Such overlapping provides a potential for reducing the cardinality of the built team because we can try to find experts who satisfy multiple required skills from the overlapping areas. Moreover, grouping can improve the efficiency of forming teams. We will
elaborate the details in the following. C.-T. Li et al.
Fig. 2 An example of skill-based individual grouping
which each individual node possesses the skill si. Figure2shows an example of the skill-based grouping for the required skills s1,s2, and s3. Each group is enclosed by a dotted
circle. It can be observed that there are two groups correspond to skill s1. The two groups are
separated components since individuals in them have no past collaborations. Besides, node
i belongs to two groups because i is skilled in both s1 and s2. Node m does not belong to
any groups, because m contains no required skills and thus will not be considered for further processing.
In general, most of individuals in the network tend to be good at more than one skill. Therefore, generated groups overlap with each other. Such overlapping provides a potential for reducing the cardinality of the built team because we can try to find experts who satisfy multiple required skills from the overlapping areas. Moreover, grouping can improve the efficiency of forming teams. We will elaborate the details in the following.
6.2 Group graph construction
We have aggregated individuals into groups based on the required skills. The next step is to exploit the underlying interactions between groups. The group-based interactions are essential for finding effective connections between team members. As observed in Fig. 2, there are three kinds of relationships between groups. First, two groups are overlapped with node i since individual i is good at both skill s1and s2. Second, the s1group at left connects
directly with the s2group due to the collaboration relationships between individuals d and f
as well as d and e. The similar relationship exists (a) between the s1 group (right) and the s3
group, and (b) between the s2 group and the s3 group. Third, the s2 group and the s3 group
have indirect communication by an inter-mediator q.
To precisely reflect the communication costs between individuals in the original network, we aim at modeling the overlapped, direct-connected, and indirect-connected relationships between groups into the group graph. We associate each group interaction with a weight value to capture the communication cost between groups. Such cost not only reflects the correlation between different required skills but also guide to later group search process to form effective teams. By integrating skill-based groups, interactions between groups, and weights on group relationships, we construct a group graph to condense the information about the required skills in the collaborative social network. We formally define the group graph, group nodes, and group links below.
Definition 6.1 A group graph H = (VH, EH) is a weighted graph and is constructed according to the required skills from the collaborative social network G = (V, E), where
123
Author's personal copy
6.2 Group graph construction
8
the underlying interactions between groups. The group-based interactions are essential for finding effective connections between team members. As observed in Fig. 2, there are three kinds of relationships between groups. First, two groups are overlapped with node i since individual i is good at both skill s1 and s2. Second, the s1 group at left connects directly with the s2 group due to the collaboration relationships
between individuals d and f as well as d and e. The similar relationship exists (a) between the s1 group (right) and the s3 group, and (b) between the s2 group and the s3 group. Third, the s2 group and the s3 group have
indirect communication by an inter-mediator q .
To precisely reflect the communication costs between individuals in the original network, we aim at modeling the overlapped, direct-connected, and indirect-connected relationships between groups into the group graph. We associate each group interaction with a weight value to capture the communication cost between groups. Such cost not only reflects the correlation between different required skills but also guide to later group search process to form effective teams. By integrating skill-based groups, interactions between groups, and weights on group relationships, we construct a group graph to condense the information about the required skills in the collaborative social network. We formally define the group graph, group nodes, and group links below.
Definition 6.1 A group graph H = (VH, EH) is a weighted graph and is constructed according to the required skills from the collaborative social network G = (V, E), where VH is a finite set of group nodes, EH⊆ VH × VH is a finite set of group links, and each edge (grpsi, grpsj) E H is associated with a weight wij.
Definition 6.2 Group nodes are defined according to the required skills. For a certain required skill s S, a
group node grps VH contains a set of nodes V(grps) ⊆ V in G and satisfies the following conditions: (1) ∀u V’(grps), s ⊆ X u and (2) nodes in V’(grps) need to form an induced connected subgraph G [V’(grps)].
Definition 6.3 A group link eH EH is defined as the connection between two group nodes grpsi and grpsj in GH . The corresponding induced subgraphs of the two group nodes, G [V’(grpsi)] and G [V’(grpsj )], need to be reachable to each other. Note that two induced subgraph in G , connected by a group link, can be overlapped, direct-connected, or indirect-connected.
A group graph H can be regarded as a super-level graph of the raw collaborative network G . Each group node in H is a super-node containing a set of individual nodes in G . To encode the interactions between groups into the group graph, we associate each group link with a weight. Such weight is derived from aggregating the communication costs between individuals from two end groups of G . Given two groups, each of which contains a set of individuals in G, we employ the distance measure in single-link hierarchical clustering to compute edge weights in H . Specifically, for a group link eH = (grpsi, grpsj), the minimum shortest length between individuals in grpsi and grpsj from the expertise graph G = (V, E) is defined as the weight of edge eH . The calculation can be formulated as
weight(eH ) = | min{distG (u, v)}|
where u V(grpsi)⊆V , v V(grpsj) ⊆ V , and eH E H . The value distG(u, v) represents the shortest distance between node u and v in G . Moreover, we need to keep track of the mapping between each group link and its corresponding minimum shortest path. We denote this mapping as MSP(eH ) = path(u, v). Figure 3a shows the group graph for the collaborative network in Fig. 2. Zero weight indicates that two groups are overlapped. The MSP of the group link eH = (s2 , s3 ) is the path containing edges (h, q ) and (q , p) in G of Fig. 2.
6.3 Applying Ehanced-Steiner algorithm on the group graph
The group graph provides two merits allowing us to find effective connections between groups for the required skills efficiently. First, the group graph reduces the search space of the collaborative network. Second, since the costs between groups are minimized, the group graph can guide the graph search by traversing the lower-cost links and the more effective nodes (e.g. overlapped nodes) to connect groups. Therefore, the group graph can avoid redundant costs and decrease the cardinality of team members and unnecessary inter-mediators.
We apply the Enhanced-Steiner algorithm to the group graph. Similar to the original and generalized Enhanced-Steiner algorithms, an enhanced graph is constructed by adding and connecting the required
9
H
skills to the group nodes possessing such skills. Then by adopting Algorithm 0 with density-based seed selection, an effective group-level subgraph that con- nects groups with minimum communication cost can be derived. We denote such effective subgraph of groups as H [V’H ], where V’H ⊆ VH . The corresponding
effective subgraph of groups shown in Fig. 3a is shown in Fig. 3b.
On team formation with expertise query in collaborative social networks
VH is a finite set of group nodes, EH ⊆ VH × VH is a finite set of group links, and each edge (grpsi,grpsj)∈ EH is associated with a weight wi jH.
Definition 6.2 Group nodes are defined according to the required skills. For a certain required
skill s ∈ S, a group node grps ∈ VH contains a set of nodes V$(grps)⊆ V in G and satisfies the following conditions: (1)∀u ∈ V$(grps),s ⊆ Xu and (2) nodes in V$(grps)need to form an induced connected subgraph G[V$(grp
s)].
Definition 6.3 A group link eH ∈ EH is defined as the connection between two group nodes grpsi and grpsj in GH. The corresponding induced subgraphs of the two group nodes,
G[V$(grps
i)] and G[V$(grpsj)], need to be reachable to each other. Note that two induced subgraph in G, connected by a group link, can be overlapped, direct-connected, or indirect-connected.
A group graph H can be regarded as a super-level graph of the raw collaborative network
G. Each group node in H is a super-node containing a set of individual nodes in G. To encode the interactions between groups into the group graph, we associate each group link with a weight. Such weight is derived from aggregating the communication costs between individuals from two end groups of G. Given two groups, each of which contains a set of individuals in G, we employ the distance measure in single-link hierarchical clustering to compute edge weights in H. Specifically, for a group link eH = (grpsi,grpsj), the minimum shortest length between individuals in grpsi and grpsj from the expertise graph G= (V, E) is defined as the weight of edge eH. The calculation can be formulated as
weight(eH)= | min{distG(u, v)}|,
where u ∈ V$(grpsi) ⊆ V, v ∈ V$(grpsj) ⊆ V , and eH ∈ EH. The value distG(u, v) represents the shortest distance between node u and v in G. Moreover, we need to keep track of the mapping between each group link and its corresponding minimum shortest path. We denote this mapping as MSP(eH) = path(u, v). Figure 3a shows the group graph for the collaborative network in Fig.2. Zero weight indicates that two groups are overlapped. The
MSPof the group link eH = (s2, s3)is the path containing edges (h, q) and (q, p) in G of Fig.2.
6.3 Applying Ehanced-Steiner algorithm on the group graph
The group graph provides two merits allowing us to find effective connections between groups for the required skills efficiently. First, the group graph reduces the search space of the collaborative network. Second, since the costs between groups are minimized, the group graph can guide the graph search by traversing the lower-cost links and the more effective nodes (e.g. overlapped nodes) to connect groups. Therefore, the group graph can avoid redundant costs and decrease the cardinality of team members and unnecessary inter-mediators.
We apply the Enhanced-Steiner algorithm to the group graph. Similar to the original and generalized Enhanced-Steiner algorithms, an enhanced graph is constructed by adding and
Fig. 3 a Group graph construction from Fig.2. b The effective subgraph of (a)
123
6.4 The role composition method
Now we have obtained the effective connection subgraph of groups satisfying all required skills with minimum communication cost between groups. However, we have not yet consid- ered the requirement of the minimum number of experts for each required skill. In this final stage, we present a role composition method to decode the connection subgraph of groups
H [V’H] and compose a team with specific number of skilled members having the required skills who can communicate effectively.
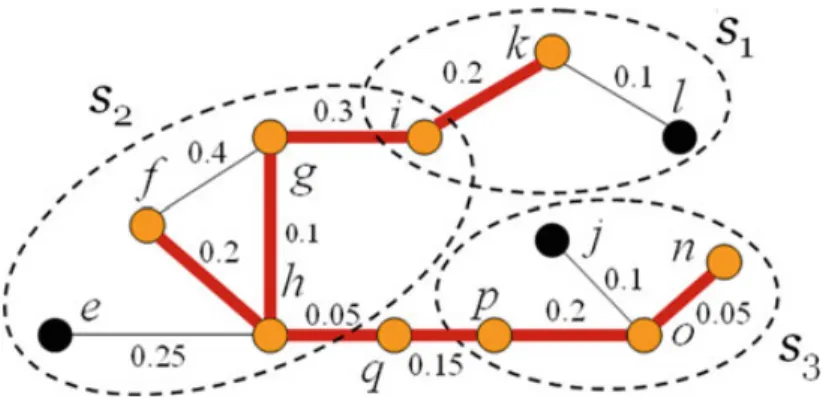
The rationale of our role composition method lies in the members of the final team V who acts with different functional roles in their communication network G [V’ ]. An inter-mediator who does not possess any of the required skills acts as the mediator between two skilled groups. For example, in Fig. 4, the individual q acts as an inter-mediator between skilled groups s2 and s3. Connectors deal with coordinating people between different skilled groups. The connectors can be individuals who are good at multiple skills, or individuals who communicate directly with the inter-mediator. For example in Fig. 4, the individual i is a connector who is good at both s1 and s2 . Both h and p are also connectors who communicate directly with inter-mediator q. Intra-mediators are individuals who communicate with more than one connectors directly. For the example in Fig. 4, the individual g is an intra-mediator connecting two connectors i and h within the skilled group s2. The other individuals who belong to skilled groups are regarded as collaborators. Hence, the other individuals in Fig. 4, namely f, l, k, n, and o, are collaborators. Recall that we have recorded the mapping from group links to the corresponding minimum shortest path between two groups, it is easy to find the roles from the communication network quickly.
C.-T. Li et al.
connecting the required skills to the group nodes possessing such skills. Then by adopting Algorithm 0 with density-based seed selection, an effective group-level subgraph that con-nects groups with minimum communication cost can be derived. We denote such effective
subgraph of groupsas H[V!
H], where VH! ⊆ VH. The corresponding effective subgraph of groups shown in Fig.3a is shown in Fig.3b.
6.4 The role composition method
Now we have obtained the effective connection subgraph of groups satisfying all required skills with minimum communication cost between groups. However, we have not yet consid-ered the requirement of the minimum number of experts for each required skill. In this final stage, we present a role composition method to decode the connection subgraph of groups
H[V!
H] and compose a team with specific number of skilled members having the required skills who can communicate effectively.
The rationale of our role composition method lies in the members of the final team V!
who acts with different functional roles in their communication network G[V!]. An
inter-mediator who does not possess any of the required skills acts as the mediator between two skilled groups. For example, in Fig. 4, the individual q acts as an inter-mediator between skilled groups s2 and s3. Connectors deal with coordinating people between
dif-ferent skilled groups. The connectors can be individuals who are good at multiple skills, or individuals who communicate directly with the inter-mediator. For example in Fig. 4, the individual i is a connector who is good at both s1 and s2. Both h and p are also
connectors who communicate directly with inter-mediator q. Intra-mediators are individ-uals who communicate with more than one connectors directly. For the example in Fig.4, the individual g is an intra-mediator connecting two connectors i and h within the skilled group s2. The other individuals who belong to skilled groups are regarded as collaborators.
Hence, the other individuals in Fig. 4, namely f, l, k, n, and o, are collaborators. Recall that we have recorded the mapping from group links to the corresponding minimum short-est path between two groups, it is easy to find the roles from the communication network quickly.
Based on the observed roles within/among groups, including connectors, inter-mediators, intra-mediators, and collaborators, we present a role composition algorithm in the following to recommend a team for the given generalized tasks. We first find the connectors and inter-mediators (line 1–3), and then we find the intra-inter-mediators by connecting the connectors within a group (line 4–8). Finally we check the specified number of experts for each required skill (line 9). If the number of requirement of any one of the required skills is not met, we will add
Fig. 4 The final team of Fig.2by role composition method
123
Author's personal copy
Based on the observed roles within/among groups, including connectors, inter-mediators, intra-mediators, and collaborators, we present a role composition algorithm in the following to recommend a team for the given generalized tasks. We first find the connectors and inter- mediators (line 1–3), and then we find the intra-mediators by connecting the connectors within a group (line 4–8). Finally we check the specified number of experts for each required skill (line 9). If the number of requirement of any one of the required skills is not met, we will add more collaborators in the corresponding skilled group by calculating the shortest paths in the corresponding groups until the given generalized task is satisfied (line 10–12). Figure 4 shows the result subgraph of team for the generalized task {<s1,2>, <s2,4>, <s3,3>}, in which those
10
i
On team formation with expertise query in collaborative social networks
more collaborators in the corresponding skilled group by calculating the shortest paths in the corresponding groups until the given generalized task is satisfied (line 10–12). Figure4shows the result subgraph of team for the generalized task{< s1,2 >, < s2,4 >, < s3, 3 >}, in which those highlighted nodes and edges belong to the final subgraph.
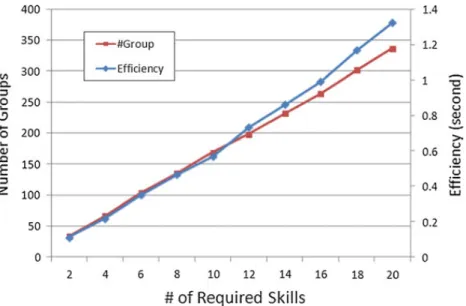
The time complexity of the grouping-based approach consists of the following parts. (1) The running time of the skill-based individual grouping is O(|V |). (2) For constructing the group graph, the bottleneck lies in the computation of the shortest paths between the inter-mediator nodes when finding the group links. It is natural to see that if the weighted shortest paths have higher values, they are less likely to be selected into the resulting Steiner tree. Therefore, we simplify this part by considering the r-step paths between groups. That is, we record only those paths whose lengths equal to or less than r in MSP (r = 2 in the later experiments we conducted). As a result, the time complexity of this part turns out to be O(|V |) since we only need to scan the nodes to test their neighbors for finding MSPs of at most 2 steps between groups. (3) Applying the Steiner tree algorithm on the group graph has running time of O(|R| × |EH|). In the worst case, the time complexity is
O(|V |3)because |R| = O(|V |) and |E
H| = O(|V |2). However, in practice, the required
skill set R and the edge set EHare much smaller than the worst-case scenarios. (4) The time
complexity of the role composition algorithm is O(|EH| + |V"|2+ np× |V"| × |grpsi|) =
O(|EH| + |V"|2). Likewise, the worst case would be O(|V |2 + |V |2) = O(|V |2)(due
to |EH| = O(|V |2) and|V"| = O|V |). However, the real-world query EH and V" are
very small. In summary, the overall time complexity of the proposed grouping method is O(|V | + |R| × |EH| + |V"|2).
7 Evaluation
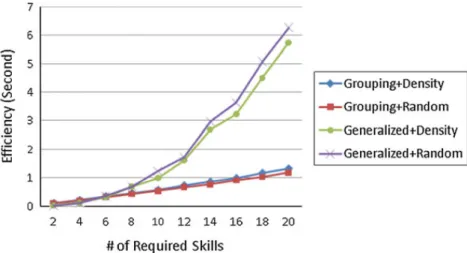
In this section, we report the performance of our proposed methods to find teams for the generalized task. We show that our methods can organize teams with low communication cost, low cardinality, and less inter-mediators. In addition, our solution to compose teams of experts is efficient in terms of running time.
123
Author's personal copy
The time complexity of the grouping-based approach consists of the following parts. (1) The running time of the skill-based individual grouping is O (|V |). (2) For constructing the group graph, the bottleneck lies in the computation of the shortest paths between the inter-mediator nodes when finding the group links. It is natural to see that if the weighted shortest paths have higher values, they are less likely to be selected into the resulting Steiner tree. Therefore, we simplify this part by considering the r -step paths between groups. That is, we record only those paths whose lengths equal to or less than r in MSP (r = 2 in the later experiments we conducted). As a result, the time complexity of this part turns out to be O (|V |) since we only need to scan the nodes to test their neighbors for finding MSPs of at most 2 steps between groups. (3) Applying the Steiner tree algorithm on the group graph has running time of O (|R| × |E H |). In the worst case, the time complexity is O (|V |3) because |R| = O (|V |) and |EH | = O (|V’|2). However, in practice, the required skill set R and the edge set EH are much smaller than the worst-case scenarios. (4) The time complexity of the role composition algorithm is O (|EH | + |V’ | 2+ n p × |V’ | × |gr psi |) = O (|E H | + |V’ |2 ). Likewise, the worst case would be O (|V |2 + |V |2 ) = O (|V |2 ) (due to |E H | = O (|V |2 ) and |V’ | = O |V |). However, the real-world query E H and V are very small. In summary, the overall time complexity of the proposed grouping method is O (|V | + |R| × |E H | + |V ‘|2 ).
7. E
VALUATIONIn this section, we report the performance of our proposed methods to find teams for the generalized task. We show that our methods can organize teams with low communication cost, low cardinality, and less inter-mediators. In addition, our solution to compose teams of experts is efficient in terms of running time.
7.1 The DBLP dataset
We use the DBLP bibliography database to extract the connective and expertise data. The snapshot on December 30, 2008 of data mining- related conferences (including KDD, ICDM, SDM, PAKDD, PKDD, ICML, CIKM, WWW, and SIGIR) is used. We construct the collaborative social network using coauthorships. The set of connected persons consists of authors that cowork at least three papers. The skill set X i of each author i consists of the set of terms occurring in at least four paper titles that he has published. Totally there are 5,482 authors, 11,905 skills, and 10,339 edges. The weights on edges are generated according to the probability of collaboration as w(i, j ) = 1 − | Pi ∩ Pj |/| Pi Pj |, where Pi is the set of papers of i .
7.2 Experiment design
We conduct a series of experiments to demonstrate the effectiveness and efficiency of the proposed algorithms, comparing to some other methods. The evaluation consists of four parts. The first and the second are designed to compose the teams for Generalized and Basic Tasks, respectively. The third is to study the
11
performance when the required skills are compiled from diverse or irrelevant areas (denoted by
Cross-domain Tasks). The fourth is to show the time efficiency of different methods. When tackling the
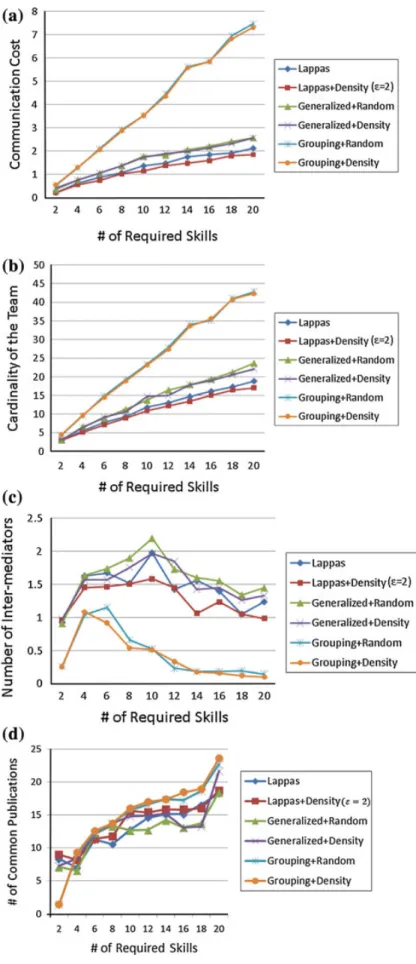
generalized tasks, we compute the effectiveness of two families of methods: the generalized Enhanced-Steiner tree algorithm and the proposed grouping-based method. When dealing with the basic tasks, we further consider another family of method: the Lappas’ Steiner tree algorithm [14]. The performance measures include (a) the communication cost (lower communication cost indicates better team collaboration), (b) the cardinality of a team (smaller cardinality indicates lower cost of such team composition), (c) the number of inter-mediators (more inter-mediators mean such team contains more irrelevant people), (d) the number of common publications shared by at least two experts in the team (more common publications among the experts indicate that they tend to communicate well with each other), and (e) the skill count, defined as the average frequency that a skill appears in papers of the experts in the team, averaged over all the required skills and over all the experts in the team (higher skill count value means the team members tend to be good at the required skills).
To generate the expertise queries for the experiments, instead of randomly selecting the required skills from the entire skill set [14], which is a bit unreasonable in the real-world scenario, we consider each paper as one task and regard the keywords in each paper as the corresponding required skills. In other words, we simulate the process of recruiting experts who possess different skills to work on the research topic described in a paper. Papers published in years 2005–2008 are used to construct query skill sets, and the numbers of required skill sets are 1,467, 1,712, 1,755, and 1,824, respectively, in these four years. To solve the generalized tasks, the next step is to associate a specific number of experts with each required skill. Since there is no information about the number of experts required by each skill, we generate such numbers according to a simple rule: If a certain skill is more popular (i.e., more people are good at such skill), the project leader will want to select more individuals for such skill because this skill is commonly required in the real world. Specifically, every query task is controlled by two parameters: (a) the number of required skills t and (b) a fixed ratio r [0, 1] which determines the specified number associated with each required skill. Specifically, we randomly pick t required skills from the keywords appearing in all paper titles. If a keyword (i.e., a required skill) appears F times in all paper titles, we round off F ∗r to be the required number of experts for such skill. In addition, the experiments below have the following settings: we vary t = 2, 4, . . . , 20 and set r = 0.02. For every (t , r ) pair, we generate 100 random generalized tasks and report the average values of the results obtained.
In the following experiments, we compute and compare the performance over the methods of three families. The first is the proposed grouping-based approach with ran- dom seed selection (Grouping +
Random) and with density-based seed selection (Group- ing + Density). The second is the devised
generalized Enhanced-Steiner algorithm with random seed selection (Generalized + Random) and with density-based seed selection (Generalized + Density). The third is the Lappas’s Enhanced-Steiner algorithm [14] with random seed selection (Lappas) and with density-based seed selection (Lappas +
Density). For the experiments of generalized tasks, we compare only the first two families (because the
original Lappas’ method cannot handle the generalized tasks). For the basic tasks, we compare all the three families.
7.3 Experimental results 7.3.1 Generalized task
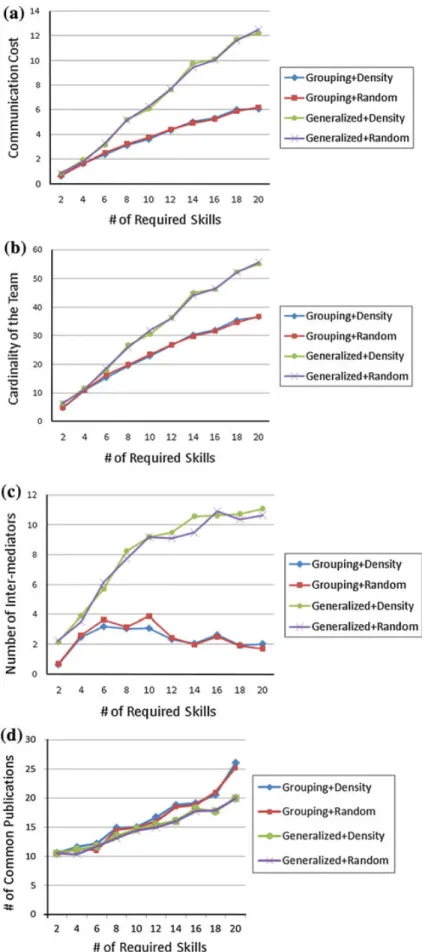
Figure 5 exhibits the results of the proposed grouping-based methods and the devised generalized Enhanced-Steiner algorithms under the five performance measures. Figure 5a, b shows that our proposed grouping-based method outperforms the generalized algorithm on both communication cost and the cardinality of the team. In particular, as the number of required skills increase, the advantage of the grouping-based method is more significant. It is because of that the grouping can not only reduce the costs for individuals possessing the same skill but also minimize the number of inter-mediators (i.e., irrelevant persons) between groups, as evidenced by Fig. 5c. Besides, we can observe that in our grouping-based method, the number of inter-mediators does not grow as the number of required skills increases. For the last two performance measures, as shown in Fig. 5d, e, our grouping-based approach outperforms the generalized Enhanced-Steiner method. That says, our method produces smaller teams with higher number of common publications (which indicates they can enhance the experience of cooperation) and more
12
expertise at the required skills. In short, for generalized tasks, using our proposed grouping-based method can find more effective teams. On team formation with expertise query in collaborative social networks
Fig. 5 Experimental results for generalized tasks under the performance measures of a Average communica-tion cost, b average cardinality of teams, c average number of inter-mediator, d average number of common publications, and e average skill count
123
13
On team formation with expertise query in collaborative social networks
Fig. 6 Experimental results for basic tasks under the performance measures of a Average communication cost, b average cardinality of teams, c average number of inter-mediator, d average number of common publications, and e average skill count
123
7.3.2 Basic task
The basic tasks can be regarded as the special cases of the generalized tasks. We exploit the proposed grouping-based approach, the devised generalized Enhance-Steiner algorithm and the original Lappas’