A
BSTRACTThe IEEE 802.16 standard is proposed to support QoS-aware transmission of real-time service in WMANs. WiMAX adopts the polling access control for a Base Station (BS) to poll Subscriber Stations (SSs) in turn and it will increase polling delay when there is a lot of number of SSs within the BS. The disadvantage of long polling delay may not guarantee the quality of service (QoS) requirement of real-time service and cause long waiting time while not in unicast polling. Therefore, in this paper we propose an adaptive polling approach to switch the polling mode while continuously supporting real-time Polling Service (rtPS). The proposed approach consists of two phases. First, two hysteresises of number of SSs and residual bandwidth are adopted to determine the polling mode between the unicast and multicast polling modes. Second, a novel Quasi-rtPS service (QrtPS) that provides an Average Delay of real-time traffic instead of the Maximum Delay of rtPS is proposed to take over the rtPS service when the BS is in multicast polling. Numerical results demonstrate that the proposed approach outperforms the IEEE 802.16 standard in average delay and utilization significantly. Moreover, the collision probabilities of different contention slots and the number of groups within a BS are also evaluated for multicast polling.
Keywords —Adaptive polling access control, unicast polling, multicast polling, polling delay, QrtPS, contention slots
1
INTRODUCTION
Since the transmission range of the IEEE 802.11 WLAN (i.e., WiFi) is not far enough and the operated
#
This research was supported in part by the National Science Council of Taiwan, ROC, under the contract of NSC-95-2213-E-324-004.
*
The corresponding author of this paper.
1 ,3
Chien-Ming Chou and Yung-Fa Huang are with the Graduate Institute of Networking and Communication Engineering in Chaoyang University of Technology.
2
Ben-Jye Chang is with the department of Computer Science and Information Engineering in Chaoyang University of Technology.
2.4GHz is at an unlicensed frequency band, WiFi is easy to be interfered with other wireless devices. Therefore, the IEEE 802.16 standard [1] proposes the Wireless Metropolitan Area Network (WMAN) for achieving the advantages of QoS-aware, high data rate, middle transmission range, easy deployment, and low cost. WMAN is also defined as Worldwide Interoperability for Microwave Access (WiMAX).
The characteristics of the WiMAX specifications are detailed in the following three aspects. First, in the aspect of accessing channel, WiMAX adopts either Time Division Duplex (TDM) or Frequency Division Duplex (FDM) for downlink and uplink transmissions. Meanwhile, the lengths of downlink and uplink subframes are adjustable in a frame. Second, in the aspect of data rate, WiMAX of IEEE 802.16d supports high data rate from 32 to 134 Mbps with the transmission range up to 30 miles (if with a specified antenna). Third, in the aspect of QoS-aware Call admission Control (CAC), the BS supports a fully QoS-aware administration of allocating channel for all registered SSs. The high priority traffic, e.g., real-time service, can be scheduled before the low priority traffic; thus, the reward of the network provider can be maximized while with the same wireless resource.
In this paper, we focus on the delay constraint problem of the Point-to-Multipoint (PMP) access mode when a BS serves a high density of SSs. In such a PMP polling model, based on BS’s residual bandwidth, BS will decide to adopt one of three polling modes (i.e., Unicast, Multicast, and Broadcast polling) to poll SSs and then decide to allocate access channel for each request. The difference among these polling modes is the number of SSs that a BS polls at each poll. The unicast polling completely overcomes the request collisions but causes long polling delay that is one of the most critical issues that should be addressed. On the other hand, broadcast polling is similar to the contention-based mechanism, which suffers from collisions and without delay guarantee. Finally, multicast polling has the characteristics between the unicast and broadcast polling modes. Although the polling mode is changeable based on the BS’s residual bandwidth, the number of SSs becomes the most important parameter that will affect the polling mode and QoS.
[2-3] have proposed to deal with that the collision probability of the multicast and broadcast polling modes is impacted by the number of contention slots in an uplink subframe. [4] proposed that the optimal contention period for a WiMAX with a fixed number
Dynamic Polling Access Control for High Density Subscribers in
Wireless WiMAX Networks
#of SSs is2M−1, where Mis the number of SSs. Cho et al. [5] analyzed that a WiMAX network can yield the highest throughput when the backoff window size is equal to the number of SSs.
In the aspect of QoS issue, [7] proposed a mechanism for a high-priority service to borrow bandwidth from the low-priority service when the required bandwidth of the high-priority service is larger than the residual bandwidth. [8] proposed a scheduling mechanism for different priority services. [9] proposed and analyzed a QoS-based WiMAX by simulations, in which the DRR and WRR scheduling algorithms are adopted for a system.
The remainder of the paper is organized as follows. Section II describes the network model and performance metrics for evaluation. The adaptive polling criteria and enhanced contention resolution algorithms are described in Section III. Section IV evaluates the performance of the proposed approach and the IEEE 802.16 protocol in several important metrics. Finally, conclusions are given in Section V.
2
N
ETWORKM
ODELThis section first defines the network model for WiMAX networks. Then we briefly describe the collision problem of contention slots in two aspects, including initial ranging and bandwidth request in the group polling.
Now, we model an IEEE 802.16 wireless network as a graph, W=(V,E), which consists of a set of mobile nodes,
V
, and a set of wireless links,E
. Each mobile node has the same transmission radius and some nodes of V are selected as Base Stations that are denoted asV
BS and the other nodes are the SSs that are denoted as iGgSS
V, , where
i
is the node index and Gg, Gg∈G, is the group index, which is used for multicast polling andG
is a set of groups. Meanwhile, VSS and G are represented as thenumber of SSs and groups, respectively. Each wireless link is associated with a channel capacity, Cap(l), where
l
is a wireless link ofE
. The wireless network supportsK
classes of traffic, which are labeled k =1,...,K , where class 1 represents the lowest class traffic and classK
represents the highest class traffic. In multicast and broadcast polling, SSs enter into the contention-based bandwidth request. The ranges of contention window of various classes are different. Since for guaranteeing higher-class traffic has smaller contention window and prior to be allocated bandwidth, we setmin min
j
i W
W ≥ and max max
j i W W ≥ , where
i
,
j
∈
k
, j i≤ , and min i W and max iW represent the minimum and maximum contention window of class
i
, respectively.An example of the unicast polling mode is demonstrated in Fig. 1, in which a BS, VBS, polls each SS, VSS, at the downlink subframe time for the polled SS to require bandwidth. If the BS accepts the new request, it replies the SS the allocated channel at next downlink subframe. In consequence, in unicast polling, the polling delay,
T
pu, of WiMAX is thusf SS u
p
V
T
T
=
⋅
,where
T
fis a frame time. Clearly, the polling delay increases while the number of SSs increasing and may cause not to meet the delay bound of real-time service.A BS changes to the multicast polling mode when the available bandwidth is not enough for all SSs via unicast polling. A multicast polling example is demonstrated in Fig. 1, in which a BS, VBS, polls each group,
G
i , at the downlink subframe time with a group ID, i.e., a specified CID, for all SSs that are belong to the group for requiring bandwidth. The SS that wants to require bandwidth will send a bandwidth request with a random contention mini-slot within an uplink subframe. SS will receive the allocated channel at next downlink subframe. In multicast polling, the polling delay, m p T , of WiMAX is f m p G T T = ⋅ ,where
T
f is a frame time. Therefore, with a fixed number of registered SSs, when the number of groups increases, the multicast polling delay increases but the collision probability of a group decreases because the number of SSs per group decreases. Consequently, the number of groups becomes an important parameter in WiMAX that will be considered and simulated in this work in detail. Internet GroupGa WiMAX Network Unicast polling Multicast polling BS V a G i SS V, a G j SS V, a G k SS V, Unicast polling Multicast polling BS SS b G l SS V, b G m SS V, b G n SS V, GroupGb3
A
DAPTIVED
ELAY-C
ONSTRAINTP
OLLINGA
PPROACHSince the large number of SSs brings a long polling delay and causes not to meet the QoS guarantee of real-time services, we propose an adaptive delay-constraint polling approach to improve the polling delay of real-time services and to maximize the network utilization when a WiMAX has a high density of SSs. The motivation of the proposed approach is to switch adaptively between the unicast and multicast polling modes for increasing utilization and reducing average delay. The approach consists of two phases for achieving the purposes, including the determination phase for switching the polling mode and the phase of efficient scheduling for multicast polling. The detail description of this approach is explained as follows.
A. A novel service class of QrtPS
In the IEEE 802.16 standard [1], the rtPS service only can be scheduled in unicast polling for the reason of avoiding delay due to request contentions. Although the rtPS service can overcome such a contention delay, it suffers from the waiting delay when BS is not in the unicast polling mode. For improving the waiting delay issue of rtPS, a novel service class, called the quasi rtPS service (i.e., denoted as QrtPS), is proposed herein for taking over the rtPS service to be scheduled continuously while in the multicast polling mode. The QrtPS service supports the QoS requirements between that of rtPS and nrtPS (non real-time Polling Service) services. The main differences between QrtPS and rtPS have in two aspects. First, rtPS supports Maximum Delay constraint, but QrtPS only supports Average Delay constraint. Second, the QrtPS is designed to support Traffic Priority for the contention-based bandwidth request in multicast polling.
B. Two-Phase Adaptive Polling Approach
Phase 1. The determination phase for switching polling mode
In WiMAX, an SS registers to a BS before accessing channel for requiring data transmission; thus, the BS is aware of the registration information of all registered SSs and the total number of SSs. Although rtPS can obtain better QoS guarantee than that of nrtPS and BE (Best Effort), rtPS can not be scheduled while not in unicast polling. In IEEE 802.16, a BS will switch from the unicast to multicast polling when the available bandwidth is not enough for unicast polling. Furthermore, the polling delay increases linearly based on the total number of SSs while in the unicast polling mode. The polling delay may exceed the Maximum Delay and the Maximum Sustained Traffic Rate of rtPS services and then causes not to meet the QoS requirements of rtPS as well as ceases rtPS services. Therefore, we propose an adaptive switching mechanism to switch the polling
mode between unicast and multicast polling modes that are described in the following two cases.
Case 1: In the unicast polling mode
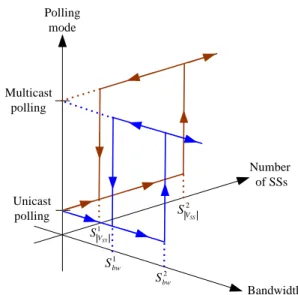
Initially, a BS is in the unicast polling mode. The residual bandwidth of the BS will decrease as the allocated bandwidth of the unicast polled SSs increases and the polling delay increases as the number of SSs increasing. Additionally, for avoiding unnecessary switching due to the ping-pong effect, the adaptive approach adopts two hysteresises mechanism with two thresholds for the number of SSs and bandwidth, respectively, in which these thresholds are denoted as 1 SS V
S
and 2 SS VS
, andS
1bw andS
bw2 . In consequence, the margin of a hysteresis is bounded at the low threshold,S
1, and the high threshold,S
2, respectively, and the margin interval is denoted as1 2 S S − = Γ , as shown in Fig. 2. Number of SSs Polling mode Multicast polling Unicast polling Bandwidth 2 SS V S 1 SS V S 2 bw S 1 bw S
Fig. 2. Two two-threshold hysteresises of the number of SSs and bandwidth
The BS first checks whether the polling delay resulted from the threshold of number of SSs, 2
SS V
S ,
exceeds the Maximum Delay of rtPS service or not, i.e., Delay Maximum T SVSS f _ 2 ⋅ ≥ . (1)
If the check result is true, the BS will switch to multicast polling. Otherwise, the BS will check whether the allocated bandwidth exceeds the threshold of
S
bw2 or not, i.e., 2 ) ( _bandwidth n Sbw Allocated ≥ . (2) wheren
represent the WiMAX network ID. If thecheck result is true, the BS will switch to multicast polling. Otherwise, the BS still stays in the unicast polling mode.
The reason to check the number of SSs before the residual bandwidth is that the polling delay to rtPS
service is more critical rather than the residual bandwidth. Consequently, the proposed approach may switch to multicast polling under that the condition of (1) is met even though the BS still has plenty of bandwidth. Specifically, the unicast polling delay may extremely increase when the number of registered SSs increases and cause that the BS can not provide rtPS services with the constraint of Maximum Delay. Under the situation, the IEEE 802.16 network will not switch to other polling modes, i.e., still in unicast polling. But it only can support QoS requirements for nrtPS and BE. As a result, the defect in IEEE 802.16 causes network reward loss from the high-priority rtPS service when a high density SSs are within a BS.
Case 2: In the multicast polling mode
In the multicast polling mode, the proposed QrtPS service will take over the rtPS service. Two QoS traffic parameters, i.e., Average Delay and Traffic Priority, for QrtPS is considered for achieving that QrtPS can be scheduled firstly during multicast polling. First, QrtPS adopts the Average Delay constraint instead of the Maximum Delay bound, which may bring a little delay jitter, but it can serve the real-time service normally. Second, for guaranteeing the QrtPS services that can be served before nrtPS and BE while in the contention mechanism, the priority of contention request opportunities becomes QrtPS >nrtPS>BE. Meanwhile, Traffic Priority is adopted for QrtPS to set different priorities when two or more identical QrtPS services are required from the same SS simultaneously.
The BS switches the polling mode back to the unicast polling while one of the following two cases occurs. First, the number of SSs is less than the threshold of 1
SS
V
S
that makes the polling delay is much less than the Maximum Delay bound of rtPS services, i.e., Delay Maximum T SVSS f _ 1 ⋅ < . (3) Second, the allocated bandwidth is less than thethreshold of
S
bw1 , i.e., . ) ( _ 1 bw S n bandwidth Allocated < (4) Phase 2. Efficient contention resolution algorithmIn IEEE 802.16, a BS will switch from unicast to multicast polling mode when the residual bandwidth is not enough for unicast polling and only allowed nrtPS and BE services that can be scheduled in multicast polling. In consequence, the Maximum Delay of QoS requirement in rtPS will not satisfy if the duration period of multicast polling is larger than the Maximum Delay of rtPS. That motivates us to propose a novel service class, called QrtPS, with an efficient contention resolution algorithm in multicast polling for continuing scheduling the original rtPS. First, the proposed QrtPS for taking over rtPS to be scheduled
continuously in multicast polling has been described in detail in previous subsection. Now, we will detail the contention resolution algorithm for scheduling services as follows.
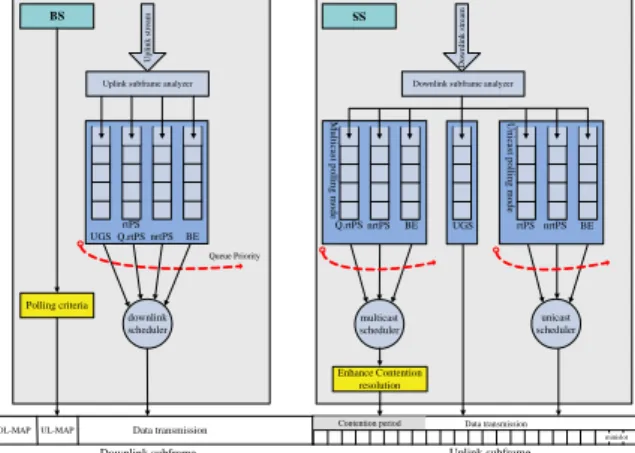
As shown in Fig. 3 is the scheduling mechanisms in the BS and SSs, respectively, in which the BS determines the polling mode based on the proposed determination algorithm at each frame time. Then the BS uses UL-MAP of a downlink subframe to notify all SSs the access information of the uplink, e.g., the information of Connection ID (CID) is used for each SS to determine which type of polling mode is assigned and then the SS requires bandwidth within the Information Element (IE) at uplink subframe. In unicast, the SS can require any class of service and the unicast scheduler in SS schedules different-class packets based on the scheduling criteria. If the BS accepts the request, the BS will send a grant message including the allocated slot index to the required SS and then the SS can start to send data packets to the allocated channel slot.
When the condition of switching to multicast polling is satisfied, the BS switches to multicast polling. Then the BS polls each group with a specified multicast CID in turn, in which the proposed QrtPS service will take over the rtPS service for rtPS to be scheduled in multicast. Since rtPS brings more reward than that of nrtPS and BE, the proposed QrtPS thus minimizes the waiting delay of rtPS while guaranteeing average delay for real-time services in multicast polling and thus increases the network reward significantly. downlink scheduler multicast scheduler unicast scheduler Enhance Contention resolution Polling criteria Queue Priority U p li n k s tr ea m
Uplink subframe analyzer
DL-MAP
Downlink subframe
UL-MAP Data transmission
BS UGS rtPS Q.rtPS nrtPS BE nrtPS BE UGS M u lti ca st p o llin g m o d e Q.rtPS nrtPS U n ic as t p o lli n g m o d e BE rtPS D o w n li n k s tr ea m
Downlink subframe analyzer
Uplink subframe
Contention period Data transmission
minislot SS
Fig. 3. The scheduling algorithms in BS and SS
4
N
UMERICALR
ESULTSThis section evaluates the proposed adaptive switching of polling mode access control (i.e., denoted as APC) for efficient transmission real-time services in WiMAX networks by comparing various performance metrics, including average delay, utilization, and collision probability of request contention. The IEEE 802.16 standard [1] is the primary compared approach, which is denoted as IEEE 802.16. Moreover, the performance metrics under different number of SSs within a BS, number of groups of a BS, and various arrival rates of rtPS are also evaluated.
The evaluated WiMAX network is demonstrated in Fig. 1, which consists of a BS and
NDS
SSs. Theses SSs are randomly divided intoNGS
groups, whereNGS
≤
NDS
. In the evaluation, three classes of traffic are considered – Unsolicited Grant Service (UGS), rtPS, and nrtPS. The traffic parameters of three service classes, which are the summary of the traffic models in [6][7][9], are described as follows.The UGS traffic of an SS is allocated when the SS is registered to the BS. The rtPS service is assumed to arrive at the WiMAX network to a Poisson distribution with arrival rate,
λ
. The average holding time of the rtPS service is exponentially distributed and its mean is normalized to unity. Meanwhile, the rtPS service can be used for Video on Demand (VOD). On the other hand, the nrtPS service is assumed to arrive based on a Pareto distribution with parameters of α_on,α
_
off
andβ
. Such an nrtPS can be used for the applications of HTTP and FTP. For guaranteeing rtPS service can be scheduled in multicast polling and avoiding unnecessary switching due to the ping-pong effect, the proposed adaptive polling approach considers two types of thresholds with hysteresis for number of SSs and bandwidth, respectively. Several useful parameters for the simulations are shown below:Number of SSs (NDS) = 0~400 Number of groups (NGS) = 20~120 Minimum backoff window size, min
W = 3 Maximum backoff window size, max
W = 6 Number of contention slots (NCS) = 0~23
,
0~24,0~25and 0~26
Total bandwidth = 40 Mbps
Bandwidth for UGS (CBR) = 6.3 Kbps Bandwidth for rtPS = 64 Kbps
Bandwidth for nrtPS = 16 Kbps Frame duration time = 1 ms Bandwidth request timeout = 10 ms Multicast Assignment time = 15 ms
Arrival rate of Poisson distribution,λ(rtPS) = 4~16 Average holding time of Exponential
distribution,µ (rtPS) = 1
Parameters of Pareto distribution, α_on = 1.6, off
_
α = 1.5 and β (nrtPS) = 1
Lower bound threshold of number of SSs, 1 SS
V
S =
90
Upper bound threshold of number of SSs, 2 SS
V S = 100
Lower bound threshold of bandwidth, 1
bw
S = 85% Upper bound threshold of bandwidth, 2
bw
S = 90%
The 95% confidence intervals of the simulation results in the following figures originate from 25 independent runs. For each run, the simulated time is 1100 units of mean connection holding time. The
initial 100 time units are considered the transient period and performance samples are therefore discarded.
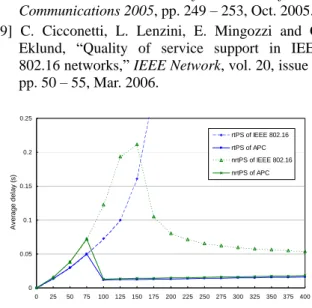
In Fig. 4, the average delay of both the rtPS and nrtPS of the proposed APC approach are lower that of IEEE 802.16 under all different number of SSs. In IEEE 802.16, the average delay of both rtPS and nrtPS increase as NDS increases and NDS<150. The IEEE 802.16 lacks available bandwidth for unicast polling when NDS>150. It thus switches to the multicast polling and rtPS will not be scheduled, so the average delay of rtPS in IEEE 802.16 increases significantly as NDS>150. Nevertheless, nrtPS can continue to be scheduled in multicast polling and results in decreasing the average delay. In APC, it switches to multicast polling when NDS exceeds the upper bound threshold of 100. Since QrtPS will take over rtPS, the average delay of rtPS and nrtPS decreases as NDS>100.
The utilizations of APC and IEEE 802.16 under different NDSs are shown in Fig. 5. Both the utilizations increase as NDS increases up to 150 and then enter into saturation, i.e., the utilization will keep at a fixed point. From Fig. 5, we can observe that APC yields higher utilization than that of IEEE 802.16 under all cases of NDS. There are two contributions of the result. First, since APC considers the hysteresises of the number of SSs and bandwidth at the same time, APC efficiently avoids the unnecessary switching. Second, in multicast polling APC adopts QrtPS to take over rtPS and APC schedules QrtPS and nrtPS services for achieving high utilization, but IEEE 802.16 only can schedule the nrtPS service.
Since in multicast polling a BS polls each group in turn, it may cause collisions of bandwidth requests. Two key parameters, including the number of SSs in a group and the number of contention slots (i.e., denoted as NCS), affect the performance in WiMAX. Therefore, the collision probability, average delay of rtPS and nrtPS under various NGS are evaluated when NDS is 400. The results are shown in Fig. 6.
As shown in Fig. 6 are the collision probabilities of four different numbers of contention slots of 4, 16, 32, and 64. The case of NCS=8 yields the highest collision probability because it has the smallest range of contention slots. The case of NCS=16 yields very competitive collision probability as compared to that of NCS=32 and NCS=64. Meanwhile, NCS=32 and NCS=64 almost have the same collision probability so the case of NCS=64 is a redundant case when NDS is 400. Moreover, the collision probabilities of all different contention slots decrease while the number of groups increasing. The reason is that the number of SSs per group decreases while the number of groups increasing and thus results in low collision probability.
5
C
ONCLUSIONSFor reducing the waiting delay of rtPS when a BS in the multicast polling, we proposed an adaptive
polling mechanism to determine the polling mode in a high-density SSs WiMAX for minimizing the average delay and maximizing network utilization. The adaptive polling approach comprises a two-phase procedure – the phase of determining the polling mode and the phase of efficient contention resolution. In the first phase, two hysteresises of number of SSs and residual bandwidth are proposed to switch the polling mode between the unicast and multicast polling modes. In the second phase, a novel QrtPS service class is proposed to take over the rtPS service when the BS operates in multicast polling. The primary difference between rtPS and QrtPS is that rtPS is with the Maximum Delay bound but QrtPS is with the Average Delay constraint. In consequence, the proposed approach efficiently reduces the average delays of rtPS and nrtPS, and then significantly increases the network utilization. Meanwhile, with two hysteresises of number of SSs and residual bandwidth, the proposed APC approach avoids unnecessary switching. Numerical results demonstrate that the proposed approach outperforms IEEE 802.16 in average delay of rtPS and nrtPS and network utilization under different number of SSs within a BS and various arrival rates of rtPS. Meanwhile, the case of NCS=16 yields the optimal collision probability and average delay.
6
R
EFERENCES[1] “IEEE Standard for Local and Metropolitan Area Networks Part 16: Air Interface for Fixed Broadband Wireless Access Systems,” IEEE Std. 802.16, Oct. 2004.
[2] M. Hawa and D. W. Petr, “Quality of Service Scheduling in Cable and Broadband Wireless Access System,” Tenth IEEE International Workshop on Quality of Service 2002, pp. 247 – 255, May 2002.
[3] G. Chu, D. Wang and S. Mei, “A QoS architecture for the MAC protocol of IEEE 802.16 BWA system,” IEEE International Conference on Communications, Circuits and Systems and West Sino Expositions 2002, vol. 1, pp. 435 – 439, June 2002.
[4] S. M. Oh and J. H. Kim, “The Analysis of the Optimal Contention Period for Broadband Wireless Access Network,” IEEE Pervasive Computing and Communications Workshops 2005, pp. 215 – 219, March 2005.
[5] D. H. Cho, J. H. Song, M. S. Kim and K. J. Han, “Performance analysis of the IEEE 802.16 wireless metropolitan area network,” IEEE Distributed Frameworks for Multimedia Applications, pp. 130 – 136, Feb. 2005.
[6] Y. Yao and J. SUN, “Study of UGS grant synchronization for 802.16,” ISCE 2005, pp. 105 – 110, June 2005.
[7] H. Wang, W. Li and D.P. Agrawal, “Dynamic admission control and QoS for 802.16 wireless MAN,” Wireless Telecommunications Symposium, 2005, pp. 60 – 66, April 2005.
[8] H.S. Alavi, M. Mojdeh and N. Yazdani, “A Quality of Service Architecture for IEEE 802.16 Standards,” Asia-Pacific Conference Communications 2005, pp. 249 – 253, Oct. 2005. [9] C. Cicconetti, L. Lenzini, E. Mingozzi and C. Eklund, “Quality of service support in IEEE 802.16 networks,” IEEE Network, vol. 20, issue 2, pp. 50 – 55, Mar. 2006. 0 0.05 0.1 0.15 0.2 0.25 0 25 50 75 100 125 150 175 200 225 250 275 300 325 350 375400 NDS A v e rage de lay ( s) rtPS of IEEE 802.16 rtPS of APC nrtPS of IEEE 802.16 nrtPS of APC
Fig. 4. The average delays of rtPS and nrtPS of different approaches under various NDS
0 0.2 0.4 0.6 0.8 1 1.2 0 25 50 75 100 125 150 175 200 225 250 275 300 325 350 375 400 NDS U ti li z a ti on IEEE 802.16 APC
Fig. 5. Utilization of different approaches under various NDS 0 0.1 0.2 0.3 0.4 0.5 0.6 20 40 60 80 100 120 NGS C o ll is ion p rob a b ili ty o f rt PS NCS = 8 NCS = 16 NCS = 32 NCS = 64
Fig. 6. Collision probabilities of different contention slots under various NGS