國立交通大學
土木工程學系
碩士論文
工地施工人員動線評估系統
Route Evaluating System for Construction Sites
研 究 生 : 李宗勳
指 導 教 授 : 曾仁杰 博士
工地施工人員動線評估系統
研究生:李宗勳
指導教授:曾仁杰 博士
國立交通大學土木工程學系(研究所)碩士班
中文摘要
增進營建工地之施工效率與安全,一直是研究人員所追求的目標。其中施工 動線配置之優劣,悠關建築工地之施工效率及施工安全,找出施工工地當前動線 潛在之問題,為本研究最主要之目的。本研究利用主動式無線射頻辨識(Active Radio Frequency Identification,簡稱 Active RFID)技術所提供施工人員之所在位 置及移動記錄,透過視覺化技術(Visualization)與 A*最佳路徑演算法(A-Star path-finding),建置工地施工人員動線評估系統,用以找出施工工地中可能存在 物料配置或動線規劃之問題所在,以供管理人員瞭解與改善施工環境。 本研究以模擬交通大學基礎大樓興建工程為範例,假設現場工作人員各配帶 搭載主動式 RFID 之識別證,內存其基本資料及負責工作,工地並已架設適當之 訊號讀取器,藉由讀取器所接受 RFID 之識別證之訊號強弱,定位該佩帶人員之 所在位置,透過本系統找出施工中是否存在不良動線,並評估是否有員工施工效 率不彰之現象。 關鍵詞:無線射頻辨識、視覺化、最佳路徑規劃、動線規劃A Route Evaluation System for Construction Sites
Student:Tsung-Hsun Lee
Advisor:Dr. Ren-Jye Dzeng
Department of Civil Engineering
National Chiao Tung University
Abstract
Efficiency and safety on construction sites is always the primary goal of researchers. The appropriateness of route arrangement concerns the efficiency and safety within a construction site. The objective of this paper is to explore the underlying route problems in construction sites. This paper uses the Active Radio Frequency Identification (Active RFID) technology to track the current location and movement of each construction worker and then applies visualization and A-Star path-finding algorithms to build a route evaluation system for construction sites. This paper attempts to find the potential problems in material allocation and route planning and provide a reference for construction managers in understanding and improving the construction environment.
A simulated example that involves construction of the Basic Science Teaching Building in National Chiao Tung University is employed. It is assumed that each construction worker carries an Active RFID tag that contains personal information and information of assigned tasks, and various active RFID readers have been set up at necessary locations of the construction site. Based on the strength of signal detected from active RFID tags, the system can locate and track the position of each worker. With the proposed system, construction managers can identify inefficient routes in the construction site and evaluate efficiency of construction workers.
致 謝
能順利完成此篇論文心中真是充滿許多的感動,希望透過此致謝向我的指導 教授 曾仁杰老師獻上最誠摯的謝意,承蒙曾老師一路上指導與照顧,除了論文 的研究方向與架構給予啟發與匡正外,更提供學生許多學習與見識的機會,在曾 老師的教導下,學生真的學到不少寶貴的知識與技術,對老師您學生有著說不完 的感謝,老師對學生的恩惠,學生畢生難忘。除此之外,感謝口試委員 王維志 老師及 王世旭老師,在百忙中抽空替學生口試,並於口試提供許多可貴的建議, 使本論文更完備與充實。 特別感謝我的程式寫作啟蒙老師,中華大學土木系 楊國湘老師與中華大學 生資系 許文龍老師與交通大學土木系 洪士林老師,是您不厭其煩教導學生如何 撰寫程式,並提供許多程式寫作之觀念與技巧,學生才有今日之程式寫作技術完 成此論文,在此,向您敬上深深之謝意。 感謝汎儀學姊的教導與資訊提供,感謝燕青學長提供寶貴經驗,感謝慕蓉學 姊不斷協助,因為有您的幫助,本論文才得以順利完成,真的很謝謝你們。另外 感謝資管組同學:亦卓、俊翰、春秀、奕禎、泯錡、奕樺、家良、中芳、亞珺; 資訊組同學:柔宇、江祥、麗松、書綺、雲直,一同在課業上相互扶持與幫助, 與你們一同學習的過程,是求學過程中最值得回憶的時光。另外也感謝我的好 友:婉婷、秉宏、冠廷、佳賓、舜友、宏仁、旻翰,總是不斷給予我鼓勵及幫助, 並提供許多工地實務上之相關經驗與建議,深受你們幫助,謝謝。 最後向我親愛的父母致上最高的感謝,一直以來對我無怨無悔的付出、支持 與信賴,讓我在學習路上擁有動力與勇氣,堅定自己夢想前進。目 次
第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 1 1.3 研究方法 ... 2 1.4 研究假設與限制 ... 2 1.5 研究流程 ... 3 1.6 論文架構 ... 5 第二章 文獻探討 ... 6 2.1 動線規劃 ... 6 2.1.1 空間定位技術比較 ... 9 2.1.2 空間模型 ... 14 2.1.3 路徑規劃演算法 ... 17 2.2 視覺化技術 ... 23 2.3 RFID 技術 ... 26 2.3.1 RFID 技術原理... 26 3.2.2 RFID 於營建之應用 ... 29 第三章 系統模組 ...31 3.1 系統架構 ... 31 3.1.1 系統前置準備 ... 33 3.1.2 系統設定流程 ... 34 3.1.2 系統資料結構 ... 35 3.2 人員定位系統介紹... 37 3.2.1 登入作業 ... 37 3.2.2 員工資訊設定作業 ... 38 3.2.3 地圖對應座標設定作業 ... 41 3.2.4 定位資料輸出作業 ... 46 3.3 系統圖資結構 ... 48 3.4 A-Star 最佳路徑演算法 ... 50 3.5 資料視覺化演算法... 54 3.5.1 人員歷史移動資料動畫 ... 54 3.5.2 空間流量累積圖 ... 57 3.6 系統使用原則 ... 58 第四章 系統實作 ...60 4.1 系統規格 ... 62 4.2 使用者權限規劃 ... 64 4.3 圖資設定工具 ... 684.3.1 圖資檔 ... 69 4.3.2 圖資設定 ... 71 4.3.3 區域限制 ... 77 4.3.4 員工管理 ... 78 4.3.5 系統設定 ... 80 4.4 最佳路徑工具 ... 82 4.5 歷史軌跡圖 ... 84 4.6 人員移動資料動畫... 87 4.7 空間流量累積圖 ... 90 4.8 員工出\退工統計圖 ... 93 4.9 區域限制管理機制... 94 第五章 實例應用 ...96 5.1 空間圖資建立 ... 97 5.1.1 區域定義 ... 98 5.1.2 員工資料輸入 ...101 5.1.3 區域限制名單 ...102 5.2 案例分析 ...103 5.2.1 擁擠通道分析 ...104 5.2.2 施工區衝突分析 ...105 5.2.3 不良動線分析 ...107 5.2.4 施工效率分析 ... 111 5.2.5 人員調度實例分析 ... 112 5.2.6 員工出\退工狀況分析 ... 113 5.2.7 員工進出管制區域分析 ... 114 5.2.8 人員區位圖分析 ... 115 5.3 系統使用小結 ... 116 5.3.1 系統使用限制 ... 116 5.3.2 系統於工程實務之探討 ... 117
表 目 次
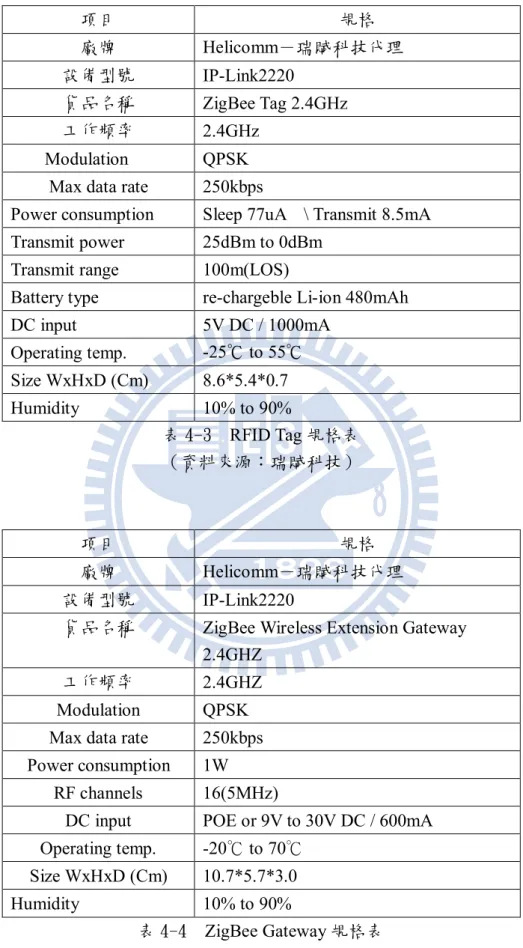
表 2-1 空間定位技術之比較 ...10 表 2-2 網格式資料結構與向量式資料結構之比較...15 表 2-3 網格距離表示圖 ...19 表 2-4 視覺化技術分類表 ...25 表 2-5 頻帶與特性...26 表 2-6 各空間定位演算法之比較 ...28 表 2-7 RFID 應用於營造業研究之匯整 ...30 表 3-1 員工資料資料表 ...36 表 3-2 管理人員帳密資料表 ...36 表 3-3 範例空間網格資料(1)...50 表 3-4 範例空間網格資料(2)...51 表 3-5 範例空間網格資料(3)...51 表 3-6 範例空間網格資料(4)...52 表 3-7 範例空間網格資料(5)...52 表 3-8 範例空間網格資料(6)...53 表 4-1 主畫面選單功能說明 ...61 表 4-2 RFID Reader 規格表 ...62 表 4-3 RFID Tag 規格表 ...63 表 4-4 ZigBee Gateway 規格表 ...63 表 4-5 軟體規格表...64 表 4-6 使用者權限與功能對照表 ...64 表 4-7 管理者介面圖資工具 ...68 表 4-8 圖資設定資料輸出格式範例 ...70 表 4-9 關路徑判定虛擬碼 ...86 表 4-10 工類別物件程式碼 ...88 表 4-11 空間流量累計圖虛擬碼 ...92 表 5-1 交通大學基礎大樓興建工程假設案例各項基本資訊 ...96 表 5-2 擁擠通道分析重點整理 ... 104 表 5-3 施工區衝突分析重點整理 ... 105 表 5-4 不良動線分析重點整理 ... 110 表 5-5 施工效率分析重點整理 ... 111 表 5-6 人員調度實例分析重點整理 ... 112 表 5-7 員工出\退工狀況分析重點整理 ... 113 表 5-8 員工進出管制區域分析重點整理 ... 114 表 5-9 工施工統計圖分析重點整理 ... 115圖 目 次
圖 1-1 施工範圍 ... 2 圖 1-2 研究流程圖 ... 4 圖 2-1 各文獻與本研究關係圖 ... 6 圖 2-2 網格的組成方式 ...14 圖 2-3 網格式和向量式空間資料結構模型 ...16 圖 2-4 Dijkstra 與 A*演算法之比較 ...17 圖 2-5 A*演算法流程 01 ...18 圖 2-6 A*演算法示意圖 ...18 圖 2-7 A*演算法流程 02 ...20 圖 2-8 A*演算法流程 03 ...20 圖 2-9 A*演算法流程 04 ...21 圖 2-10 A*演算法流程 05 ...21 圖 2-11 A*演算法流程 06 ...22 圖 2-12 A*演算法示意流程圖 ...22 圖 2-13 主動式 RFID 傳輸訊號流程圖 ...27 圖 2-14 各定位演算法之示意圖 ...27 圖 3-1 系統架構圖 ...32 圖 3-2 系統前置準備 ...33 圖 3-3 系統設定流程 ...34 圖 3-4 系統輸入資料關聯模式 ...35 圖 3-5 人員定位與路線追蹤系統登入介面 ...37 圖 3-6 員工資訊列表 ...38 圖 3-7 員工資訊新增 ...39 圖 3-8 員工資訊顯示 ...39 圖 3-9 員工資料修改 ...40圖 3-20 人員定位資料輸出 ...46 圖 3-21 人員定位資料輸出格式 ...47 圖 3-22 系統圖資結構 ...48 圖 3-23 圖資矩陣示意圖 ...49 圖 3-24 員工類別關係示意圖 ...54 圖 3-25 物件產生流程圖 ...55 圖 3-26 人員物件配合時間軸顯示演算法流程 ...56 圖 3-27 空間流量累積圖演算流程...57 圖 3-28 系統使用流程 ...59 圖 4-1 系統主畫面 ...60 圖 4-2 管理員登入介面(一) ...65 圖 4-3 管理員登入介面(二) ...66 圖 4-4 系統管理者與一般管理者之比較圖 ...66 圖 4-5 系統管理者設定一般管理者之系統畫面 ...67 圖 4-6 使用者權限判定流程 ...67 圖 4-7 圖資設定介面 ...68 圖 4-8 圖資設定結果匯出檔案 ...69 圖 4-9 圖資載入與儲存介面 ...69 圖 4-10 載入平面圖介面(一) ...71 圖 4-11 載入平面圖介面(二)...71 圖 4-12 圖資矩陣設定操作流程 ...72 圖 4-14 區域定義畫面(二) ...73 圖 4-15 區域定義畫面(三) ...74 圖 4-16 管制空間設定畫面(一)...74 圖 4-17 管制空間設定畫面(二)...75 圖 4-18 管制空間設定畫面(三)...75 圖 4-19 管制空間設定畫面(四)...76 圖 4-20 管制名單系統執行流程圖...77 圖 4-21 管制名單設定畫面 ...78
圖 4-22 .NetFramewordk Data Provider 物件架構 ...79
圖 4-23 員工資料設定介面 ...79 圖 4-24 更改密碼介面 ...80 圖 4-25 座標設定介面(一) ...81 圖 4-26 座標設定介面(二) ...81 圖 4-27 座標寬高定義 ...81 圖 4-28 座標間隔劃定範例 ...82 圖 4-29 路徑設定介面 ...82 圖 4-30 最佳路徑運作流程圖 ...83
圖 4-31 路徑規劃結果畫面 ...83 圖 4-32 路徑資訊選單介面 ...84 圖 4-33 路徑資料示意圖 ...84 圖 4-34 人員動線歷史軌跡圖 ...85 圖 4-35 人員位置原始資料視覺化示意圖 ...87 圖 4-36 人員移動資料動畫分類顯示介面 ...88 圖 4-37 座標轉換前後比較圖 ...89 圖 4-38 空間流量圖介面 ...90 圖 4-39 色塊變更介面 ...91 圖 4-40 色塊變更之累積圖 ...91 圖 4-41 員工出\退工統計圖表示方法 ...93 圖 4-42 員工出\退工統計圖節點詳細資料 ...93 圖 4-43 區域限制管理機制流程 ...94 圖 4-44 管制空間進入名單 ...94 圖 5-1 交通大學基礎大樓興建工程北側大樓一樓平面圖載入 ...97 圖 5-2 不可通過障礙之設定 ...98 圖 5-3 可通過障礙之設定 ...99 圖 5-4 管制區域之設定 ...99 圖 5-5 區域設定完成圖 ... 100 圖 5-6 員工資料輸入畫面 ... 101 圖 5-7 區域設定之畫面(一) ... 102 圖 5-8 區域設定之畫面(二) ... 102 圖 5-9 案例分析方式 ... 103 圖 5-10 空間流量累積圖-擁擠通道分析... 104 圖 5-12 施工區衝突分析-水電工施工區... 106 圖 5-13 不良動線分析-空間流量圖 ... 107 圖 5-14 不良動線分析-系統建議最佳路徑(1) ... 108 圖 5-15 不良動線分析-系統建議最佳路徑(2) ... 108
第一章 緒論
1.1 研究動機
無線射頻辨識系統(Radio Frequency Identification,簡稱 RFID)之應用與發 展層面不論是學術界或各行各業已相當廣泛,但目前卻少見有完善的 RFID 系統 應用於營建管理中,本研究利用已成功運作於交通大學工程二館之人員定位與路 線追蹤系統(LocationTracer System),此系統採用主動式(Active)無線射頻 辨識系統擁有遠距離自動感應、長時間記錄資訊等特性,搭配資通技術
(Information and Communication Technology)將可提供各類工種現場人員之所在 位置、記錄其動線軌跡之功能。 增進營建工地之施工效率與安全,一直是研究人員所追求的目標。其中施工 動線規劃好壞,更對施工時間、效率與安全影響甚鉅。目前一般營建工程,大多 以個人經驗來做規劃依據,實際施作時,會因物料、機具…等因素影響到先前規 劃之成效。藉由人員定位與路線追蹤系統記錄工地人員動線,並設計一套能透過 最佳路徑與累積流量之系統,供管理人員分析工地潛在問題,掌握工地資訊並有 效改善工地現況,擴展營造業資訊化,即為本研究主要動機。
1.2 研究目的
本研究主要目的在於應用人員定位與路線追蹤系統(LocationTracer System)之輸出資料,達成以下目的: 1. 應用該系統在配有主動式 RFID 硬體設施及正常運作且能自動記錄人員 定位資料的前提下,將其定位資料透過視覺化技術顯示其特徵。 2. 藉由本研究建置之系統,所得之輸出資訊,探討施工人員於施工環境中 實際動線與配置,進行評估,找出是否存在空間衝突之問題並加以改善, 及將本系統應用於工地人員管理用,提供適當調度人員之功能。1.3 研究方法
本研究之研究方法,係使用人員定位與路線追蹤系統所輸出之人員定位資 料,做為施工人員移動之依據,利用 Microsoft Visual C#建置動線評估系統, 藉由 A*最佳路徑演算法(A-Star path-finding)規劃之最佳動線,與各類等各 類型視覺化技術,如人員歷史移動軌跡、出\退工時間走向圖與空間流量圖 (HotSpot)等,輸出各種資訊、圖像及動畫,最後將各項輸出資訊進行比對, 試以找出系統建議最佳路徑及實際路境之差異,及空間中衝突位置。1.4 研究假設與限制
本研究擬以新竹市交通大學基礎科學教學大樓新建工程為研究範圍,記錄工 程工期為 7 天,施工人數為 60 人,工種分別為鋼筋工、模板工與水電工與小工, 施工階段為一樓模板工程與鋼筋工程,施工範圍為第一大樓結構體,如圖 1-2 紅色框線所示,探討在紀錄期間員工動線軌跡與流量,並進行問題分析與改善建 議。 此外為讓系統有效且正確搜集施工人員歷史行為紀錄,本研究分析數據需在 RFID 人員定位與路線追蹤系統之硬體設施正常運作且訊號傳回無大量損失的情 況下,任何突發性行為(如火災、地震或不正常施工)均不在本研究範圍之內。1.5 研究流程
本研究之研究流程,如圖 1-2 所示,透過文獻探討階段確立本研究之目的, 確認研究目的後,在文獻探討階段進行研究方法之選擇,並確立研究範圍後,再 進行相關文獻回顧,尋找與本研究相關之文獻。 文獻資料收集至一段落後,開始系統建置之階段,首先透過建立空間資料與 人員行為資料,為介面與演算法之輸入資料,並進行功能測試,並不斷修正其輸 入資料,直到測試系統功能達到理想狀態。 當系統建置完成,測試運作成功時,及進入系統運作階段,將模擬實例進行 實作測試,完成實作測試後,並依整體結果,開始撰寫本論文。研究方法選 擇 研究目的 確立 確立研究範 圍 文獻回顧 功能測試 修正 介面與演算 法建置 文 獻 探 討 階 段 系 統 建 置 階 段 系 統 建築空間資 料庫建置 人員行為 資料建置
1.6 論文架構
本論文分為六章,各章內容摘要說明如下: 第一章:緒論 本章節敘述本研究之動機、目的、方法、範圍與限制、流程及架構。 第二章:文獻探討 本章節首先整理歷年國、內外動線規劃相關文獻,瞭解各空間定位技術之優 缺點,探討空間模型建置技術、視覺化技術、與路徑規劃演算法理論,比較相關 研究系統開發經驗,以完善設計本研究之系統。 第三章:系統模組 本章節描述本系統軟、硬體之架構,系統圖資結構,並描述軟體設計中所使 用之演算法與系統使用原則。 第四章:系統建置 本章節將描述本系統運作環境與規格,各模組建置之方法與規則,並說明本 系統之設定原則。 第五章:實例應用 本章節將模擬實際案例,進行空間模型建立,歷史人員行為活動輸入後,針 對人員活動之移動資料進行分析與比較,找出該案例之缺失並提供改善意見。 第六章:結論與建議 為本研究之結論,與日後研究方向之建議。第二章 文獻探討
本研究目的為設計動線評估系統,本章節依研究目的尋找參考文獻,包含與 本研究相關之文獻,如動線規劃、空間模型、路徑規劃演算法、視覺化技術等, 此外本章節亦尋找與本研究所應用之人員定位與路線追蹤系統技術相關之文 獻,與本研究相關但不屬本研究範圍之文獻,如空間定位技術、RFID 技術等, 其各文獻與本研究關係如圖 2-1 所示。 本研究建置之 系統 本研究所應用 之系統 達成本研究目的 動線規劃 空間模型 路徑規劃 演算法 視覺化 技術 空間定位 技術 RFID技術 圖 2-1 各文獻與本研究關係圖2.1 動線規劃
“動線”為建築與室內設計之用語,以連接各機能空間之路線。然而施工動 線的優劣,將影響施工期間的安全與效率。目前評估動線優劣方式有兩種,一是 在規劃期間透過相關調查資料與規劃藍圖,進行系統模擬;另一則是依實際使用 情形進行評估。在動線規劃(Route planning)領域,Parsons 與 Pachuta(1980) 為核能電廠發展一套將物料運至作業地點的系統;Mahoney 與 Tatum(1994)強Tommelein 等人(1987)透過電腦輔助,開發 SIGHTPLAN 系統,透過專家 系統與人工智慧技術,配合 2-D CAD 模型,更是工地配置的典型工具。
SIGHTPLAN 主要著重於工地配置的設計,非考量人員實際動線。
Jim H.K 與 Chang Z. Y.(1998)使用 SLAM(Simulation Language For Alternative Modeling)模擬機場站內乘客與行李動線,以圖形詳細說明機場站內 乘客與行李的流程,發展機場場站的計畫與設計,改良目前機場場站的建置。在 模擬時藉由各項歷史資料決定分配函數,最後由模擬結果得到各項設施之等候線 等候長度的統計,供機場設計者為設計依據。此研究對國內外航線乘客和行李的 流程說明詳細,作為本研究設計系統之參考。 許添本(2000)研究使用錄影調查法,使用攝影機將調查路段拍攝成影片, 配合 1/100 秒計時器做精確的時間分析,於上下午尖峰時間觀測行人經過捷運站 通道之參考線前 0.5、1、2 公尺範圍內的人數作為密度之直接量測,對觀測之樣 本通過參考點時,記錄其相對前一人之距離,分析對行駛速率之影響,利用密度 與速率關係式求出流量,並以車流相關理論作為行人流之依據,分別提出「速率 - 流量」、「流量-空間」、「速率-空間」等關係式。由於這些數學模式是經由實際 拍攝捷運站通道內,行人的流動行為所導出,與本研究研究人員實際動線行為相 似,然而本研究透過 RFID 系統所記錄之人員行走之數據為人員實際行為模式, 與此篇研究有所不同。 黃俊榮(2000)、林建志(2001),利用全球定位系統(Global Positioning System,簡稱 GPS)具有即時性、全天性定位之特性,分別建立營建機具路徑規 劃與即時監控、管理系統。該研究成功整合軟硬體,將複雜工地現場予以即時圖 形化,但卻受限於 GPS 功能,該系統僅能在未遮蔽、平坦地區運作。 載瑞德(2002),將各種動線規劃的演算法特性加以歸納,整理結果如下所 示: 1. 傳統圖解技巧 2. 系統化圖解技巧 3. 最佳解數學模式與啟發式演算法 4. 多談式/整合方式方法 5. 多目標方式 6. 專家系統方法 7. 模糊理論方法 8. 模糊退火法 9. 遺傳基因方法
10. 層級分析法 Akinci 等人(2000)的研究一共將空間衝突類型分成五類: 1. 設計衝突(Design Conflict) 2. 安全上的危險(Safety Hazard) 3. 損壞衝突(Damage Conflict) 4. 擁擠(Congestion) 5. 無影響(No Iimpact) 小結以上文獻,國、內外學者歷年來利用各種定位技術、系統軟體與演算法 用以改善營建工地之空間衝突之問題,本研究希望利用 Atcive RFID 技術,配合 「系統化圖解技巧」與「最佳解數學模式與啟發式演算法」等動線規劃技巧,設 計開發新的系統軟體,用以找出空間中擁有「設計衝突」、「安全上的危險」、「擁 擠」等空間衝突問題。
2.1.1 空間定位技術比較
隨著定位科技發展,開始有不同定位科技運用在動線規劃或管理之領域上, 其定位技術包含紅外線(R. Want, A. Hopper 等 1992)、多攝影機(林昇甫、吳 晉嘉等 2005)、超音波(A. Harter, A. Hopper 等 1999)、無線網路(P. Bahl and V.
N. Padmanabhan 2000)、GPS(黃俊榮 2000、林建志 2001)、RFID、壓力感測器
(R.J. Orr and G.D. Abowd 2000)、AGPS 手機定位技術(吳景恭 2010)。
表 2-1 重新整理李重儀(2006)所彙整各種定位技術,說明特性、優缺點及 適合環境。
定位技術 優點 缺點 紅外線 (Infraed,IR) •架設成本低 •精準度高 •無法辨識個別人員 •易受環境干擾 •只能定點定位 多攝影機 (Multi-Camera) •精準度高 •架設成本低 •個別人員辨視難度高 •易受環境干擾 •只能定點定位 超音波 (Ultrasonic) •架設成本低 •近距離測距準 •易受環境干擾 •無法辨識個別人員 無線網路定位 (ZigBee、WiFi、 Bluetooth…等) •涵蓋範圍廣 •可辨識個別人員 •定位即時性 •人員需佩帶定位設備 •易受環境干擾 GPS 定位 •定位即時性 •可個別人員辨識 •無法於室內定位 •人員需佩帶定位設備 •成本較高 Passive RFID •精準度高 •可個別人員辨識 •不受環境影響 •只能定點定位 •感應範圍近 •人員需佩帶定位設備 Active RFID •定位即時性 •涵蓋範圍廣 •可個別人員辨識 •可傳輸額外資訊 •人員需佩帶定位設備 •易受環境干擾 •成本較高 壓力感測器 •精準度高 •範圍極小 •無法辯視各別人員 AGPS 手機定位技 術 •定位即時性 •耗電低 •涵蓋範圍廣 •室內定位精準度降低 •小範圍定位精準度低 •人員需佩帶定位設備
由於營建工地佔地廣,需即時人員定位與辨識功能,綜合表 2-1 各技術之優 缺點,本研究採用 Active RFID 搭配無線網路技術做為空間定位技術,而主動式 RFID 與無線網路技術目前市場分歧,分類方式也有差別。 主動式 RFID 以頻段來分類,主要有 433MHz 以及 2.45GHz 這兩個頻段。 然而,433MHz 並非屬於 ISM(Industry、Science、Medical)之頻段,且容易受 到業餘無線電人員所使用之無線電設備干擾,因此實際使用時有較多的干擾變 因。至於 2.45GHz 則較容易受到人體之影響。
主動式 RFID 以使用方式而言,則分為 infrastructure 及 ad-hoc 兩種。若為 infrastructure 模式,必須遵從 Reader 搭配 Tag 的使用情境,而且每一台 Reader 均需要使用網路線來將收取的標籤資訊後傳到中央系統。而 ad-hoc 則打破使用 限制,Readers 本身可以自行建立無線網絡,將讀取到的標籤資訊透過無線傳輸 傳遞到末端的路由點,再透過有線網路後傳到資訊系統。在這樣的無線網絡架構 下,有幾項優點:(詹雅惠 2007) 1. 佈建容易 大部分的 reader 僅需電力線,不需要實體網路線。而且端點自行會建立無線 網路,無須人為管理與設定。 2. 可靠性高 多重路徑之保障,當有 reader 運作失敗時,可透過其他路線回傳至路由點。 3. 低成本 此類無線端點成本較低廉,有助於大量人員監控之應用。 目前市面上有許多彼此不相容的無線網路技術,一般常見近距離無線通訊技 術有(林嘉榮 2009、樂尚文 2008、翟雷等人 2008): 1. WiFi(IEEE 802.11) WiFi 最初規範於 1997 年提出,是目前無線區域網路的主要技術。 WiFi 目 前最常見有(1) IEEE802.11a,在 5.8GHz 頻段工作時,最高傳輸率為 54Mbps;(2) IEEE802.b,在 2.4GHz 頻段工作時,傳輸頻率為 1Mbps~11Mbps;(3) IEEE802.g, 在 2.4GHz 頻段工作時與 IEEE802.b 相容,最高傳輸率可達 54Mbps。由於優異的 頻寬是以較高的功耗為代價,所以在耗電量上也比較高。
2. 超寬頻(Ultra Wide Band, UWB) 超寬頻技術是一種無線載波通訊技術。並不採用正弦載波,而是利用奈秒級 的非正弦波窄脈衝傳輸資料,所以所佔的頻譜範圍相當的廣。超寬頻在傳輸速率 快、但通訊距離短、平均發射功率低,適合用於攜帶應用。 3. 藍芽(Blue Tooth) 藍芽是以 IEEE802.15.1 為基礎,工作頻率在 2.4GHz,最大傳輸速率為 723.3Kbps;在藍芽 2.0 版本,傳輸速率可達到 10Mbps,傳輸距離在 100m 以內。
4. 近場通訊(Near Filed Communications, NFC)
NFC 是一種短距離的高頻無線通訊技術,允許電子設備之間進行非接觸式 點對點資料傳輸。這個技術由 RFID 演變而來,是一種短距高頻的無線電技術, 在 13.56MHz 頻率運作,傳輸距離於 20 公分以內。
5. 紅外線資料通訊(Infra-red Data Association, IrDA)
利用紅外線彼此進行點對點的通訊技術。目前資料傳輸率以達 16Mbps,彼 此間不需實體連線,已被廣泛運用於小型移動設備。 6. ZigBee ZigBee 是最近幾年內發展出來的近距離無線通訊技術,擁有低耗功、低成 本、易應用、使用 2.4GHz 為主的頻段與容易擴充等特性。 以上無線傳輸等技術雖然都有類似的用途,但實際的使用情境又不盡相同。 例如,Wi-Fi 有不錯的有效範圍及傳輸率,可以使用在大部份的無線網路場合, 但是在可攜式裝置上,它的耗電量可能相當大。藍芽的耗電量相當小,一般認為 適合作為手機等一類裝置的網路裝置。ZigBee 由於傳輸速率和距離的表現都沒
Feature(s) IEEE 802.11b Bluetooth ZigBee
電源持續力 hours days years
複雜度 Very complex complex Simple
節點數 32 7 65536
建立連線速度 Up to 3 seconds Up to 10 seconds 30 ms
傳輸距離 100m 10m 70m ~ 300m
擴充性 Roaming possible no Yes
資料傳輸率 11 Mbps 1 Mpbs 250 Kbps
安全性 SSID 64bit, 128bit 128bit AES
表 2-2 WiFi \ Bluetooth \ ZigBee 無線技術比較
(資料來源:禾伸堂企業股份有限公司,ZigBee 介紹 2007)
綜合 ZigBee RFID 擁有較長距離定位、較高穩定性、較省電、最大網路節點 數及最低成本等優點,故 ZigBee RFID 為本研究採用硬體設備,其硬體規格與運 作流程將在本論文第四章說明。
2.1.2 空間模型
在電腦系統中,表示地圖資料的空間結構資料可歸類為網格式資料結構 (Raster Data Structure)和向量式資料結構(Vector Data Structure)兩大類。由 於使用資料結構不同,相對用來找尋最短路徑的演算法,也會完全不同。 (Heywood I.等人 1998、Charles M. E. 1990)
網格式資料結構是用每個大小不同的像素(pixel),相鄰相組而成,在網格 的切割方法,有三角、四角與六角網格(圖 2-2),其中四角網格因較好切割, 最為廣泛使用;向量圖則是利用一連串記錄著圖形的坐標資訊,經程式解讀後輸 出圖形。 圖 2-2 網格的組成方式 (資料來源:吳建興 2000)
將空間資訊網格化是最快速且直接,但向量式結構較節省記憶體空間,表 2-2 與圖 2-3 是網格式資料結構與向量式資料結構之比較。 項目 優點 缺點 網格圖 •資料結構簡單 •儲存空間固定 •可有效表示空間變動 •適合統計分析與模型製作 •適合參數性繪圖 •使用者自義圖形及區域容易 •自動化區域分析精準度高 •容易編輯使用者介面 •空間解析度低 •儲存空間大 •難表示相位資料 向量圖 •解析度高 •初始儲存空間小 •適合資料庫管理 •適合參數性定義圖形符號 •可建立繪圖規則 •旋轉和縮放快速正確 •資料結構複雜 •計算量大 •儲存空間差易大 •無法有效表示空間變動 表 2-2 網格式資料結構與向量式資料結構之比較 (資料來源:吳建興 2000、施建龍 2005)
2.1.3 路徑規劃演算法
最短及最佳路徑問題為一般路網問題求解之基礎,其應用層面相當廣泛,求 解目標是兩點間最少成本之路徑,然而路段上成本可表示為距離、時間、費用… 等。
有關空間管理與路徑規劃的領域中,許多演算法已多被提出研究,諸如:規
則格子點法(Regular Girds Method)、方樹法(Quadtree Method)、中線圖法 GVD
(Generalized Voronoi Diagrams)、位能場法(Potential Filed Method)、自由空間 分解法(Free Space Decomposition)…等。(黃俊榮 2000、黃心寧 2007)
因在空間資料結構有網格式以及向量式兩種方式,故找尋最佳路徑之方法皆 不相同,在 2.1.2 節中決定使用網格式空間模型,其好處在於網格式的路徑規劃 演算法較為快速直接,因為在向量式結構中,圖形間的關係不如網格式來的容易 處理。而本研究以 A*尋路演算法(The A-Star Pathfinding algorithm)做為系統最 佳路徑之依據。
A*尋路演算法為 Peter Hart, Nils Nilsson 與 Bertram Raphael 等人於 1968 年發 表的演算法,改良自 1959 年 Edsger Wybe Dijkstra 所發表的 Dijkstra 演算法, Dijkstra 演算法雖然可以保證找到一條最短的路徑,但不如 A* 演算法這樣簡捷 快速。同時,Dijkstra 的搜尋深度在某些情形下也容易顯得不適用。 Dijkstra 演算法 A*演算法 無 障 礙 有 障 礙 圖 2-4 Dijkstra 與 A*演算法之比較 (資料來源:Amit’s A* Pages 2010)
由圖 2-4 比較後可看出,A*演算法搜尋深度雖不如 Dijkstra 演算法,但路 徑規劃結果是一致的,且因搜尋深度不同 A*能更快速計算找出最佳路徑。假設 一網格式空間,A 為起點 B 為終點,而「///」為不可穿越之障礙物,欲使用 A* 演算法在兩點間尋找最佳路徑(如圖 2-5),則 A*演算法之流程如下: 圖 2-5 A*演算法流程 01 (資料來源:修改自 Lester, P 2005)
1. 從點 A 開始,將點 A 存入「Open List」中,Open List 為規劃後之路徑 可能會通過之方格,為待檢查之列表。
2. 尋找點 A 周圍所有可通過之方格,將其方格存入 Open List 中,並將點 A 做為父方格(parent square),除了起始方格外,每一個方格皆有父 方格,如圖 2-6 中的反指針,可用於表示每一方格其它始位置。 3. 從 Open List 中刪除點 A,並將點 A 存入「Close List」,Close List
為儲存所有不需要再檢查之方格。
)
(
)
(
)
(
n
g
n
h
n
f
f(n):目前節點 n 的評價分數 g(n):從起點到任意頂點 n 的實際距離 h(n):任意頂點 n 到目標點的估算距離 g(n)表示路徑從起點至 N 點的移動距離,其距離表示如表 2-3,令水平或垂 直網格間格距離為 10,對角線方向為 14,此數值是將對角線水平與垂直距離利 用畢式定理(Pythagorean theorem)c ab計算得 2 1.414,為節省計算 根號與小數,取整數 10 與 14 可提高完成尋路演算法之速度,本研究系統因設有 可穿越之障礙物,依障礙物穿越難易度調整 g(n)值,及可達到穿越障礙物是否 為最佳路徑之效果。2
12
為方便計算 取整數 14 10 14 1 0 1 10 0 102
12
14 10 14 表 2-3 網格距離表示圖 (資料來源:本研究) 而 h(n)為 A*演算法中最重要的一項指標,目前已有許多計算 h(n)方法,本 研究採用最為直接快速的曼哈頓法 Manhattan Method 來計算 h(n),它計算當前 格(current)到目的格(target)之間水平和垂直的方格數總合,不另計算對 角方格,最後將總合乘上最短距離 D。 target.y)] -t.y abs(curren + target.x) -nt.x [abs(curre * D = h(n) 圖 2-7 是 A*初步運算結果,F、G、H 值分別列在在每個方格中的左上、左下 與右下角。以圖 2-7 起始點 A 相臨右邊之方(唯一方格中含有字母的)格為例, 計算方法如下:40 30 10 ) ( 30 )] 3 3 ( ) 6 3 ( [ * 10 ) ( target.y)] -t.y abs(curren + target.x) -nt.x [abs(curre * D = h(n) 10 ) ( ) ( ) ( ) ( n f abs abs n h n g n h n g n f 圖 2-7 A*演算法流程 02 (資料來源:修改自 Lester, P 2005) 其餘每一格 f(n)值皆為 g(n)與 h(n)相加而得,為了繼續搜尋,將由 Open List 中選擇 F 值最低之方格,做以下步驟處理:(如圖 2-8)
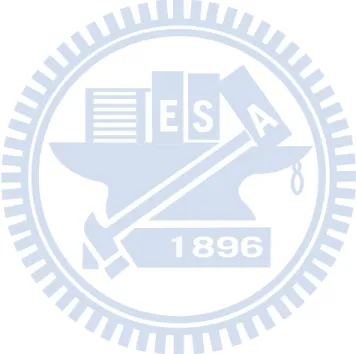
3. 如某相臨方格先前不在 Open List 中,將其方格的父方格設定為選中之 方格。 4. 如某相鄰之方格已在 Open Lsit 中,比較新路徑 g(n)值是否更低,若 a. 否,不做任何事。 b. 是,將相鄰方格之父方格設定為選中之方格,並重新計算 F 與 G 值。 圖 2-9 A*演算法流程 04 (資料來源:修改自 Lester, P 2005) 在圖 2-9 中,當路徑上、下 f(n)值相同時,及依資料結構後進先出(LIFO, last-in first-out)之規則,優先選擇新找到之方格,可加快程式運作。最後 重覆此規則,直到 B 點目標格被加入 Close List 中(如圖 2-10),最後從目標 格 B 點開始依父方格方向移動,及可引導出一條最佳路徑(如圖 2-11)。 圖 2-10 A*演算法流程 05 (資料來源:修改自 Lester, P 2005)
圖 2-11 .A*演算法流程 06 (資料來源:修改自 Lester, P 2005) 將起點加入 OpenList 計算起點相鄰八格 F 值, 並存入 OpenList 中 將 N 移到 CloseList 中 N 是否為終點 選擇 OpenList 中 F 值 最低之方格 N 否 是 CloseList 即為最佳路徑 是 是 設定起、終點 結束
2.2 視覺化技術
為協助管理人員理解施工人員於施工工地移動之過程,進而分析改善動線或 配置之情形,本研究透過探討視覺化之定義、類型與技術,於資料龐大人員歷史 移動軌跡之資料過程中,協助管理人員認知與掌握施工人員之移動行徑與工地通 道之流量。 Card 等學者(1999)將視覺化定義為使用電腦輔助且具互動性之資料視覺 表達,目的為增強人類認知,即透過增進使用者記憶、處理有關資料及減少資訊 搜尋,已達成強化人類認知目的之方法。Bederson 等學者(2003)認為視覺化可 改善使用者使用電腦之經驗,且視覺化表達為解決大多數問題之最佳方法。視覺 化為透過電腦輔助以視覺形式表達物理資料或抽象資料,以強化人類認知進而輔 助決策進行或問題解決之方法;即視覺化不止是透過不同視覺屬性(如形狀、顏 色等)將原始資料轉換為視覺形式,亦包含透過視覺感受將該視覺形式轉換為人 類認知之過程。(謝燕青 1999) Luras (2005)認為視覺化可根據原始資料類型分為科學視覺化與資訊視覺 化,科學視覺化表達具直接空間對應之物理資料,如地形圖、氣象圖;資訊視覺 化表達不具明顯空間對應之抽象資料,如財經走勢圖。因資訊視覺化缺乏直接空 間對應,需考量如何將不具直接空間對應之抽象資料對應至有效率之視覺形式, 故較科學視覺化複雜。 Wenzel 等人(2003)認為視覺化技術可根據圖形觀點以下列八屬性進行分 類,並將各屬性之屬性值列於表 2-4: (1)圖形維度:指視覺化技術所呈現空間維度,包括 1D、2D、2.5D 及 3D。 (2)圖形表示:指視覺化技術所使用表達方式,包括符號(如文字符號、抽象符 號)、視覺化設計者必須根據任務需求選擇適當之視覺化準則,以協助使用者 有效進行決策或解決問題,如有些情況需詳細表達各項資訊,有些情況需簡 化表達資訊以提供使用者掌握整體概觀,本研究將根據上述準則擬定適當之 視覺化方式,以協助工地管理人員有效掌握施工人員於工地移動軌跡、流量 與出退工之情形。圖示(如表達各種運動之象形圖形)及接近真實圖形(如 以接近照片之圖形表達建築物)。(3)顯示格式:指視覺化技術呈現資料之格式,包括文字(由有限字元組成)、表 格(經結構化安排之文字)、簡圖(經結構化安排之文字、符號或圖示,如長 條圖)、圖片、虛擬 3D 世界(可供使用者觀察之 3D 環境)及虛擬實境(具 虛擬物件及場景可供使用者操作之 3D 環境)。 (4)圖形幾何尺度:包括無幾何尺度(未牽涉幾何系統)、線性尺度(使用一般座 標軸)、對數尺度(使用對數座標軸)、指數尺度(使用指數座標軸)及分類尺 度(不根據數值而根據類別分割之座標軸)。 (5)幾何投影方式:指視覺化技術所使用將物件由 n 維空間變換至較低維度空間 之方式,包括無幾何投影(不需進行幾何投影)、垂直投影(投影中心位於無 窮遠處之投影)、斜投影(投影中心位於無窮遠處,且投影線與投影平面不垂 直之投影)及透視投影(投影中心距投影平面有限距離之投影)。 (6)圖形時間維度:指視覺化技術所呈現圖形如何隨時間改變而發生變化,包括 無時間維度(靜態圖形)、離散時間維度(所呈現圖形僅於離散時間點發生變 化)及連續時間維度(所呈現圖形隨時間持續發生變化)。 (7)圖形時間順序:指視覺化技術所呈現單一圖形或一系列圖形之時間順序,包 括固定圖形(僅呈現單一圖形)、非循序圖形(非循序地呈現一系列圖形)及 循序圖形(循序地呈現一系列圖形)。 (8)圖形互動性:指視覺化技術所呈現圖形提供使用者操作之程度,包括無互動 (僅能觀察所呈現圖形)、可操作圖形呈現流程(如開始-停止按鈕)、可操作 觀察視野(如可縮放觀察視野)、可於特定範圍內進行特定操作(如於廠商所 建置模擬系統內進行所允許各項操作)及完全互動(可與整個虛擬世界進行各 項操作)。
分類屬性 內容 圖形維度 1D 2D 2.5D 3D 圖形表示 文字符號 抽象符號 象形符號 接近真實 圖示 接近真實 圖示 顯示格式 文字 表格 簡圖 圖片 虛擬實境 圖形幾何 尺度 無幾何尺 度 線性尺度 對數尺度 指數尺度 分類尺度 幾何投影 方式 無幾何投 影 垂直投影 斜投影 透視投影 圖形時間 維度 無時間維 度 離散時間 維度 連續實間 維度 圖形時間 順序 固定圖形 非循序圖 形 循序圖形-慢動作 循序圖形-正常 循序圖形-快動作 圖形互動 性 無互動 可操作圖 形呈現流 程 可操作觀 察視野 可於特定 範圍內進 行特定操 作 完全互動 表 2-4 視覺化技術分類表
(資料來源:Wenzel, Bernhard, and Jessen, 2003)
各視覺化技術皆有其表達能力與限制,如 3D 動畫可表達大量動態資訊,卻 無法表達統計特徵值,反之,統計圖表可表達重要特徵值,卻無法表達動態行為 過程,因此透過上述視覺化技術屬性,根據需求選擇適當視覺化表達方式為提高 視覺化效果之重要步驟。視覺化設計者必須根據任務需求選擇適當之視覺化準 則,以協助使用者有效進行決策或解決問題,如有些情況需詳細表達各項資訊, 有些情況需簡化表達資訊以提供使用者掌握整體概觀,本研究將根據上述視覺化 技術擬定適當之視覺化方式,以協助工地管理人員有效掌工地施工人員之移動情 形與空間流量。
2.3 RFID 技術
無線射頻辨識系統(Radio Frequency Identification, RFID)技術係由英國於 1948 年發展出來,當時用於戰爭中,機場辨別敵我戰機時使用,縮短接戰時間,
RFID 技術被列為 21 世紀十大重要技術項目之一。(李瑞俊 2010)
2.3.1 RFID 技術原理
根據 EAN.UCC (White Paper on Radio Frequency Identification, 1999)對 RFID 的解釋,RFID 是自動資料搜集(Automatic Data Capture, ADC)的技術集 合。最基本的 RFID 由 Reader 與 Tag 組合而成。Tag(又名 Trasponder、電子標 籤、詢答機等),指使用銅或鋁等金屬製天線(antenna),和可儲存資訊的微 型 IC 晶片(integrated circuit chip)所構成之裝置,RFID tag 可以不同型式存在、 貼附或者攜帶在物件中。 陳宏宇(2004)整理,依照 RFID tag 上電源之有無與能量傳遞方式,可分 為主動式(Active)與被動式(Passive)兩種,主動式內含電池,可透過 UHF 或微波(mircowave frequencies)進行長距離通訊,記憶體較大,但成本也較高; 被動式不含電池,其電源是 tag 天線感應自 Reader 所發出 RF 電波能量,將晶片 的資料透過無線電波回傳 Reader,成本低,但通訊距離較短。表 2-5 為各式 RFID 頻帶與特性之比較。
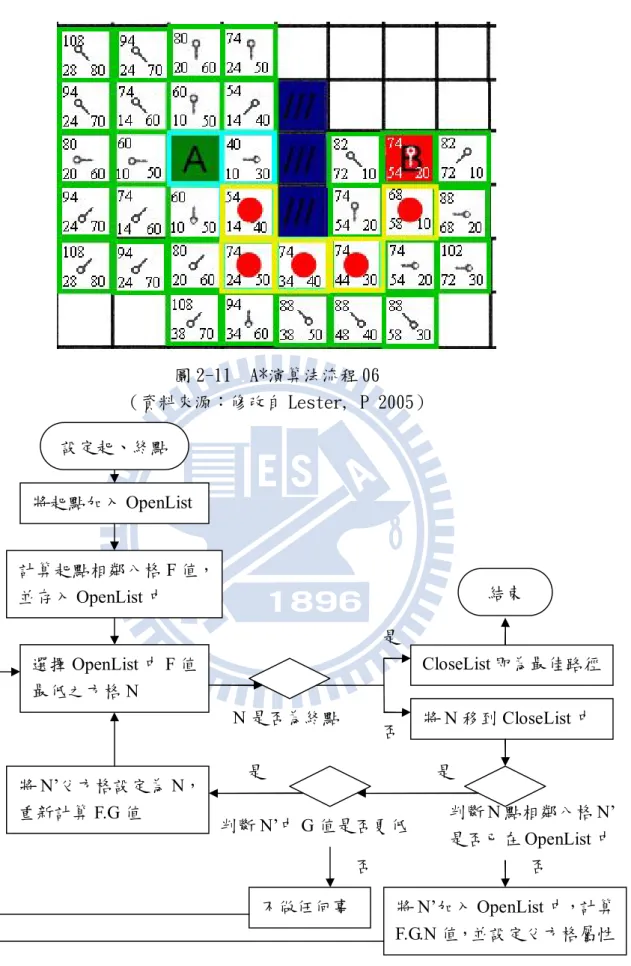
本研究配合營業工地環境,需要室內外即時與大範圍定位,採用主動式 RFID 做為數據搜集之技術, Yamada I.與 Shiotsu S.等人(2005)整理主動式 RFID 收 集正確數據之流程,與透過資通技術(Information and Communication Technology) 之資訊傳輸架構,將數據從 RFID Tag 傳送至資訊系統進行處理,如圖 2-13 說明。 透過 RFID Reader 不斷發送驗證訊號,此訊號由 RFID Tag 感應並驗證,如訊號 匹配成功則回傳 Tag 內部資料給 RFID Reader,
圖 2-13 主動式 RFID 傳輸訊號流程圖 (資料來源:Yamada I.與 Shiotsu S.等人 2005)
簡宗瑋(2006)整理,主動式 RFID 定位演算法主要有訊號強度(Receive Signal Strength, RSS)、訊號抵達角度(Angle of Arrival, AOA)、訊號抵達時間(Time of Arrival, TOA)與訊號抵達時間差(Time Difference of Arrival, TDOA)等,做為 訊號量測的定位方法。
圖 2-14 各定位演算法之示意圖 (資料來源:修改自簡宗瑋 2006)
定位方法 特性描述 RSS 理論上在自由空間是可行的,但實際環境中會受到遮蔽效應影 響,會使接收功率變小,會使得計算出之距離誤差過大。 AOA 在室內傳播接收端可能接近或包含估測端的散射範圍,故訊號 可能從各角度散射到接收端,若有此狀況 AOA 的誤差會過大。 TOA 透過多筆訊號抵達接收端的時間,來計算估測端之距離,此方 法是目前最適合於室內定位之技術 TDOA 此方法利用相對抵達時間替代 TOA 的絕對時間,可消除某種程 度的誤差,但因接收器彼此需要同步,在室內定位一樣與 TOA 會受環境影響,故對室內定位而言較不合適。 表 2-6 各空間定位演算法之比較 (資料來源:簡宗瑋 2006)
本研究之硬體設備同時使用 RSS 與 TOA 定位演算法來計算 Tag 與 Reader 之距離位置,將計算結果透過 Gateways 傳回運算主機,增強訊號與減少訊號遺 失,本研究第三章介紹將有詳細系統運作流程說明。
3.2.2 RFID 於營建之應用
1998 年,美國營建產業學會(Construction Industry Institute, CII)所召開 RFID 研討會,將 RFID 於營造業各領域應用區分為工程/ 設計(Engineering/ Design)、 物料管理(Material Mangement)、使用維護(Maintenance)及現地操作(Filed Operation)等四大類。(鄭明淵、蔡明修 2005) 近幾年由於 RFID 技術日趨成熟,RFID 在營業方便之研究也相對增加,表 2-7 將略舉例幾篇與本研究較相關之論文。 年份 作者 標題 摘要 2004 Song J. Caldas C. Ergen E. Haas C. Akinci B.
Field Trials of RFID Technology for Tracking Prefabricated Pipe Spools
等人利用主動式 RFID 技 術,應用於施工現場,快速 且大量自動辨識進場鑄鋼管 理資訊。 2004 Kwon S. W. Lee M. W. Han J. G. Cho M. Y. Park J. W.
Model Development of the Material Tracking System for High-Risk Building Construction Project Using RFID Technology 應用 RFID 及資料庫系統,針 對高層樓建築工地做物料管 理,追蹤、存放及派送等資 訊。 2005 葉世文 無線射頻辨識(RFID)於營 建產業發展策略之研究 針對 RFID 技術於營建產業 領域中之建築工程進行可行 性分析,提出 RFID 晶片於建 築工程材料上之施工方法及 施工位置之建議。 2008 林仙珠 無 線 射 頻 識 別 技 術 (RFID)應用於營造現場 安全監控系統之研究 以 RFID 技術製作承攬商安 全管理系統,具有勞工定位 及主動警訊發佈之能力,利 用 RFID 自動辨識之特性,自 動檢查勞工安全身份與安全 衛生設備,建立虛擬檢查 哨,降低人力成本。
2009 郭益良 承攬商 RFID 安全監控及 身分查核技術開發-以營 造業為例 成功的將被動式 RFID 與主 動式 RFID 結合並且將系統 無線化,開發承攬商之安全 設備自動檢查及定位系統, 擁有顯示虛擬檢查員、區域 定位、暈倒警報及求救警報 等功能。 2009 吳東毅 無線感測網路應用於侷限 空間勞工安全管理系統之 研究 利用主動式 RFID 技術、無線 感測網路技術、通訊定位技 術及無線傳輸等技術,開發 具有:勞工進入工作區域時 之身分檢查、勞工工作時所 在之活動區域及其權限之監 控、勞工個人活動狀態之檢 查、勞工緊急狀況行動報知 等功能之系統。以建立相關 警示以提高局限空間作業之 安全性。 表 2-7 .RFID 應用於營造業研究之匯整 綜合參考以上 RFID 相關研究與開發之系統,本研究欲開發之系統,除主要 能讓管理人員輕易建置空間圖資,並透過分析結果,提供管理人員找出營造環境 中之不良路徑,供以參考改善,在相關技術下並提供人員定位顯示、空間進出檢 驗、與出\退工資料統計等功能。
第三章 系統模組
本章首先描述本系統之架構,及如何利用「人員定位與路線追蹤系統」之輸 出資料做為本系統之輸入資料,隨後介紹「人員定位與路線追蹤系統」之使用與 設定流程,並探討各本系統中各項模組之設計結構與使用之演算法。3.1 系統架構
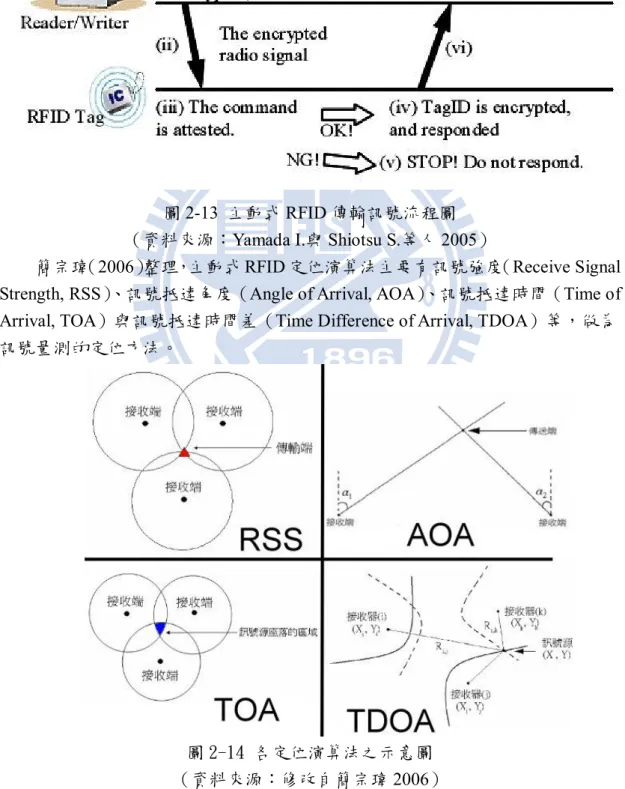
此系統架構是由三層設計而組成,包括介面層,功能層及資料層,如圖 3-1 所示。第一層介面層,提供使用者權限辨別及執行各項模組功能與資料輸入。第 二層功能層,包含圖資設定工具、空間流量累積圖、系統建議最佳路徑、歷史軌 跡圖、員工歷史移動資料動畫、員工出\退工統計圖、區域限制管理機制與施工 行為統計圖等八項模組,各模組之功能說明如下: (1) 圖資設定工具:提供管理人員可依據不同工地現場載入空間平面圖後, 進行各類障礙位置與性質、限制管理區域等方式進行空間描述,以供最 佳路徑之搜尋依據。 (2) 空間流量累積圖:根據人員定位與路線追蹤系統所獲得之人員定位資 料,利用 Hotsopt 視覺化概念與時間軸之配合,顯示各空間累積或時段 性流量累積圖,以供管理人員找出空間擁擠、動線衝突之問題。 (3) 系統建議最佳路徑:根據圖資設定之結果,透過障礙係數與 A*最佳路 徑演算法,找尋工地中任意兩點之最少障礙路徑,以供管理人員做為動 線改善之參考依據。 (4) 歷史軌跡圖:根據人員定位與路線追蹤系統所獲得之人員定位資料,將 其人員或工種之歷史移動軌跡依時間先後顯示其軌跡,供管理人員與系 統建議之最佳路徑比對,以找出工地中可能存在之動線問題。 (5) 員工歷史移動資料動畫:根據人員定位與路線追蹤系統所獲得之人員定 位資料以時間軸撥放之方式,將員工移動之過程顯示於系統上,並提供 互動選項,供管理人員瞭解員工或工種於施工期間之位置與身份資料。 (6) 員工出\退工統計圖:透過將人員定位資料之紀錄時間,將當日首筆與 末筆紀錄資料與出工日期顯示成出\退工走勢圖,提供管理人員觀察員 工施工效率與出工狀況。 (7) 區域限制管理機制:透過圖資設定工具設定限制區域與員工進出限制名 單比對,將提供管理人員透過員工進入限制區域之名單,進步管理工地 員工與工地安全。 (8) 人員區位圖:利用時間軸正規化,將人員行為以移動、施工、進入限制 區等分類方式,進行圖像化顯示,以觀察人員之施工行為。第三層資料層,包括人員定位與路線追蹤系統所得到之人員定位資料、系 統圖資設定檔、工地平面圖與系統資料庫等,其中系統資料庫紀錄了使用者帳號 資訊與員工資訊等。
3.1.1 系統前置準備
本系統前置準備作業,需由施工人員攜帶 RFID Tag,透過人員定位與路線 追蹤系統放置於各空間單元之 RFID Reader 進行 Tag 位置定位,各空間之 Reader 將定位資訊透過 ZigBee 無線傳輸技術,傳送至 ZigBee Gateway,最後管理端 Server 藉由 RJ-45 網路接收各空間 ZigBee Gateway 數據,獲得人員定位資料, 本研究之工地動線評估系統利用人員定位資料進行運算與處理,使得工地管理人 員可依軟體分析顯示之結果,進行決策處理改善與調整施工狀況,本系統前置準 備如圖 3-2 所示,各施工人員配帶存有個人資料之 ZigBee RFID Tag,此 Tag 主 動發射 2.4Ghz 之電波,放置於各空間之 Reader 接收電波透過 RSS 與 TOA 定位演 算法,計算出員工位置,並將定位結果與人員個別資料利用 ZigBee 傳輸頻率送 到各空間之 ZigBee Gateway,再傳輸到與 Server 連接之 Gateway,而獲得人員 定位資料,本研究之動線評估系統,即利用此人員定位資料,進行動線分析與評 估。 圖 3-2 系統前置準備 人 員 定 位 與 路 線 追 蹤 系 統 本 系 統
3.1.2 系統設定流程
本研究首先透過人員定位與路線追蹤系統,載入施工工地之平面圖,並建立 空間座標與人員 Tag 資料之設定,設定完成後運作系統紀錄人員之定位資料,透 過圖 3-2 之系統前置準備,將人員定位資料利用 ZigBee 傳輸技術傳回管理區伺 服器,得到施工人員定位資料之輸出檔。 利用本研究建置之系統,進行圖資設定動作,包括相同之空間座標設定與工 地障礙與區域設定後,輸入先前傳回伺服器中之人員定位資料,進行動線評估之 功能,其分析結果可供管理人員改進工地材料擺置或人員動線規劃,圖 3-3 為設 定流程之示意圖。其系統設定之細節將於 3.2 節中說明。系統設定:
系統運作
人員定位資料
圖資設定:
人員定位資料
動線評估
人
員
定
位
與
路
線
追
蹤
系
本
系
統
-空間座標設定 -人員 Tag 資料設定 -空間座標設定 -障礙與區域設定3.1.2 系統資料結構
本研究中共有四組輸入資料,圖 3-4 為各輸入資料之實體關聯模式 (Entity-Relationship Model),分別由人員定位與路線追蹤系統輸出至管理伺服器 之人員定位資料,其定位資料是由各員工所佩帶之 RFID Tag 所傳回,包含各員 工所佩帶之 Tag ID 編號、用以辨識施工人員之身份證字號與姓名、該員工所負 責之工種、所在空間位置座標、該空間位置座標進出狀況與該空間位置座標之進 出時間;而本研究所設計之動線評估系統之輸出資料分別為由管理人員設定施工 圖資之設定檔資料、員工詳細資料與系統管理者設定管理人員帳號密碼,其中員 工詳細資料與管理人員帳號密碼存放於系統資料庫中。 圖資設定檔則是另外儲存之文件檔,為紀錄管理人員圖資設定之結果,方便 管理人員更換不同施工場所,管理人員透過本系統圖資設定工具所建置之圖資設 定,將可被儲存副檔名為*.mms 與*.mms.pic 之圖資設定檔,以供日後載入設定 之用,其設定檔包含施工工地之平面圖檔、障礙空間矩陣、管制區域之資訊、座 標定義尺寸、區域限制名單。 員工資料 使用者帳 號資料 圖資設定 檔 人員定位 資料 身份證字號 Tag ID 進出時間 員工姓名 空間座標 員工工種 進出狀況 Tag ID 員工姓名 員工工種 員工聯絡方 式 員工其它註 備 員工其它註 備 員工照片 包含 施工平面圖 空間矩陣 管制區域資 訊 座標設定資 料 區域限制名 單 AutoID Account Password 呼叫詳 細資料 關聯 權限 設定檔檔名 圖 3-4 系統輸入資料關聯模式由於人員定位與路線追蹤系統之輸出資料,僅單純員工姓名與工種,為使管 理人員能進一步瞭解員工資訊,另以 Microsoft Access 資料庫建立員工詳細資料 之資料表,其資料表內儲存之詳細資料與格式如表 3-1 所示,其人員定位資料與 員工詳細資料表則透過獨立不重覆之 Tag ID 做為關聯依據。
資料表名稱 Members_info
Primary Key TagID
用途 供管理者調閱之員工詳細資料
欄位編號 欄位名稱 欄位說明
1 TagID 員工佩帶之 TAG ID,每組 ID 皆不重覆
2 Name 員工姓名 3 Class 員工工種 4 Phone 員工聯絡方式 5 Other 員工其它註備 6 photo 員工照片 表 3-1 員工資料資料表 另為了設定多使用者介面,提供一位以上之管理人員同時使用本系統,將所 有管理人員之帳號密碼儲存於系統資料庫之管理人員帳密資料表中,其資料表格 式如表 3-2,透過系統管理員可新增\修改其內容,其系統權限之設定將在本論文 第 4.3 節做說明。 資料表名稱 Managers
Primary Key AutoID
用途 紀錄系統中所有管理人員帳號密碼
欄位編號 欄位名稱 欄位說明
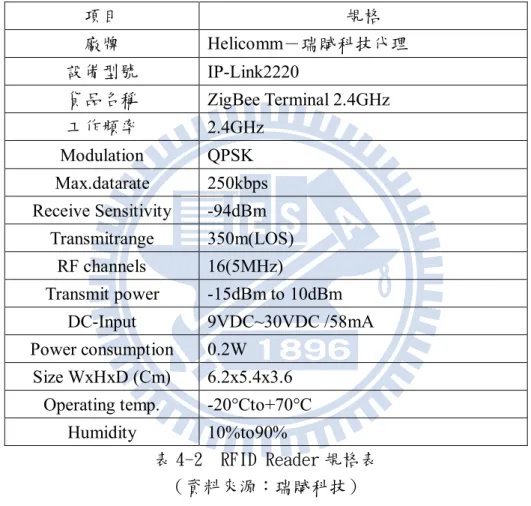
3.2 人員定位系統介紹
本系統運作的需要實際人員定位資訊,故本研究使用人員定位系統為瑞賦科
技廠商所提供之人員定位與路線追蹤系統(LocationTracer System),為人員定
位之前置準備作業。人員定位與路線追蹤系統,主要是利用 RFID 無線射頻辨識 技術,將使用者配戴上 RFID 標籤(RFID Tag),透過工地定點架設之 RFID 讀取 器(RFID Reader)對 Tag 讀取,達到人員定位與追蹤之管理目的,並設計管理 平台供管理者應用與統籌此系統。 登入此系統之管理平台後,可進行員工 Tag 可進行資訊設定之作業、地圖對 應座標設定之作業、定位資料輸出之作業等與本研究動線評估相關之主要功能, 在本小節中將針對人員定位與路線追蹤系統之各功能項目進行說明與設定需求。
3.2.1 登入作業
輸入管理者識別碼,及使用密碼,按進入登入鈕。登入成功,登入成功之後, 管理人員便可以使用左方主選單中的各項服務,點選選單內之功能項目,即可進 入使用該項功能,如圖 3-5。在任何欄位輸入了不正確的資料,或者未輸入資料, 便按下進入登入鈕,都將出現錯誤訊息。確認後再次輸入管理者識別碼及使用密 碼後按下登入以進入系統。 圖 3-5 人員定位與路線追蹤系統登入介面3.2.2 員工資訊設定作業
員工資訊設定作業功能是提供管理人員設定施工人員基本資料之相關作 業,以提供最新施工人員資訊給管理人員作為參考資料,如圖 3-6。員工資訊設 定作業共包含三個子功能,提供系統管理者來「新增」、「修改」與「刪除」學生 資訊的相關資訊,以供系統管理者進行維護學生資訊之資料,以下將針對每個功 能項目進行操作說明。 圖 3-6 員工資訊列表新增作業 新人員加入時,管理人員將進行新人員建檔登錄資料,登錄完成後,系 統資料庫即儲存了新人員之資訊,如圖 3-7。新人員資訊查詢中即可於新人 員基本資料查詢中看到本新人員基本資料。新人員基本資訊,分別有姓名、 身份證字號、負責工種、標籤 ID 等資訊,如圖 3-8,提供管理人員了解新 人員基本資訊。 圖 3-7 員工資訊新增 圖 3-8 員工資訊顯示
修改作業 提供管理人員進行修改員工相關資料。新增員工後,若是員工資料需要異動 修改,管理人員透過修改功能進行修改員工相關資料,修改完成後,系統資料庫 即儲存了員工之最新異動完成之資訊。資訊查詢中即可於員工列表資料查詢中看 到本員工已修改完成資料。員工修改資訊,分別有姓名、身份證字號、負責工種、 標籤 ID 等資訊顯示,如圖 3-9,提供管理人員進行維護員工最新異動資訊。 刪除作業 提供管理人員進行刪除員工相關資料,如圖 3-10。 圖 3-9 員工資料修改
3.2.3 地圖對應座標設定作業
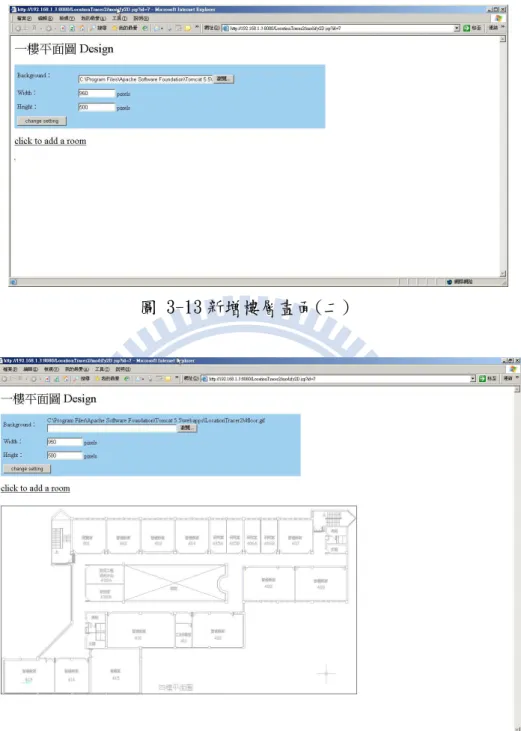
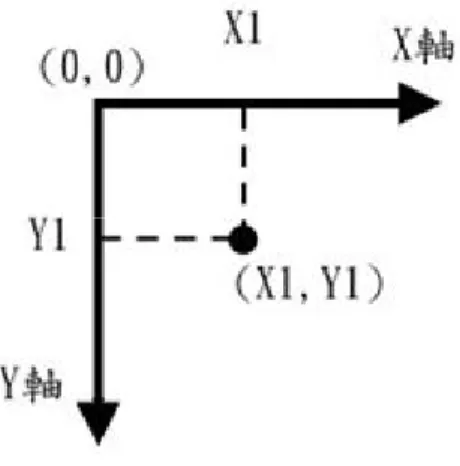
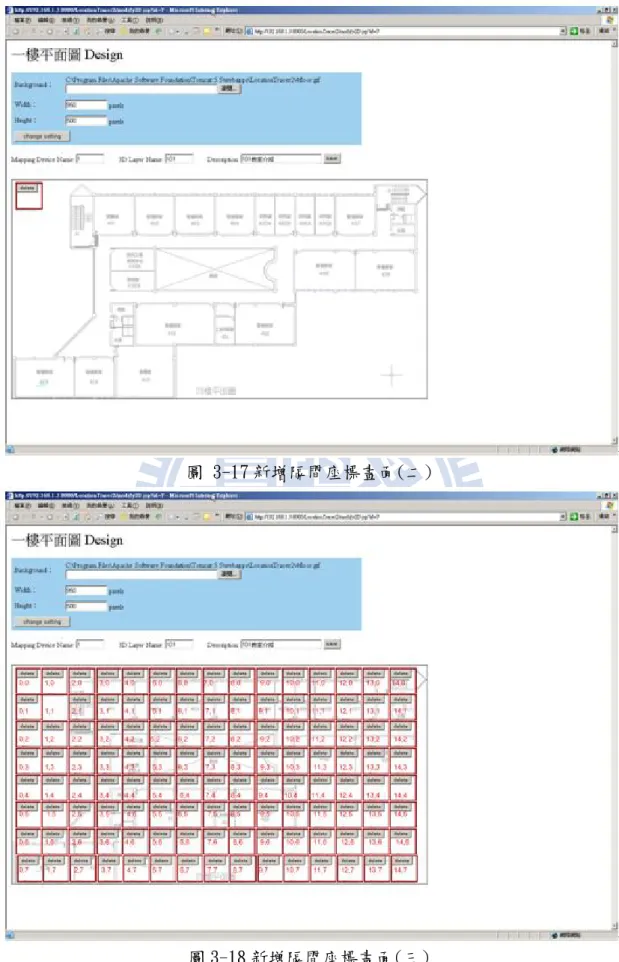
地圖對應座標設定作業的功能是管理人員者設定建築物之平面圖座標基本 資料之相對應位置,以提供最新該建築物各樓層之平面圖基本資訊給系統定位作 為參考資料,如圖 3-11。地圖對應座標設定作業共包含三個子功能,提供系統 管理者來「新增」、「修改」與「刪除」建築物各樓層之平面圖資訊的相關資訊, 以供系統管理者進行維護建築物各樓層之平面圖座標資訊,以下將針對每個功能 項目進行操作說明。 圖 3-11 地圖對應座標設定新增作業 新增作業提供系統管理者進行每個樓層平面基本資料登錄,系統資料庫 即儲存了該建築物各樓層之平面圖基本資料。點選「新增樓層」按鈕,如圖 3-12,新樓層基本資訊分別有樓層名稱、背景圖、長度、寬度等四個資訊顯 示,填寫完後,點選「儲存設定」按鈕,如圖 3-13,即樓層平面圖設定完 成,畫面將出現該樓層平面示意圖,如圖 3-14。 接著,登錄該樓層之隔間座標基本資訊,點選「新增隔間」按鈕,新增 隔間座標基本資訊分別有隔間代號、讀取器代號、隔間描述等三個資訊顯 示,填寫完後,點選「儲存」按鈕,如圖 3-15,畫面將出現該樓層之隔間 示意圖,如圖 3-16。若要刪除該隔間,請直接點選該隔間圖塊,按下 delete, 則刪除該隔間資料與圖塊,如圖 3-17。而隔間座標之代號命名方式參考影 像座標系統(image coordinate),如圖 3-18,即圖面左上角 X 與 Y 軸為原 點,其座標值各向右下方增長,隔間座標命名格式以「,」區分 X 與 Y 座標, 如某座標 X 值為 2,Y 值為 3,則命名為「2,3」。 經由這三步驟設定完成後,爾後,系統管理者點選地圖對應設定中即查 詢本新增樓層平面基本資料,提供管理者了解各樓層平面基本資訊,亦可啟 動系統開始定位運作。
圖 3-13 新增樓層畫面(二)
圖 3-15 影像座標系統示意圖
圖 3-17 新增隔間座標畫面(二)
3.2.4 定位資料輸出作業
人員定位與路線追蹤系統設定完成後,即可啟動系統開始運作,如圖 3-19, 系統將會開始紀錄佩帶 Tag 人員之移動軌跡,系統運行一段時間後,管理人員可 透過報表與查詢作業功能,設定日期區間將人員定位資料之結果以純文字格式下 載傳送至本機儲存,如圖 3-20。 圖 3-19 啟動程式畫面3.2.5 定位資料格式說明
人員定位與路線追蹤系統之輸出資料格式如圖 3-20,為紀錄施工空間中各員 工所佩帶之 RFID Tag 所傳回之資料,包含各員工所佩帶之 Tag ID 編號、用以辨 識施工人員之身份證字號與姓名、該員工所負責之工種、所在空間位置座標、該 空間位置座標進出狀況與該空間位置座標之進出時間。其資料判讀方式以相同空 間座標兩兩成對做為判斷標準,紀錄狀態 1 為進入此空間座標之時間;狀態 0 為離開此空間座標之時間。以圖 3-21 紅框線之資料判讀為例,名為蘇雨聿 Tag ID 編號 P001 之鋼筋工人,於 2010 年 3 月 25 日 14 點 6 分 20 秒進入座標為 180, 105 之空間,並於當日 14 點 6 分 25 秒後離開此空間。而座標空間之定義與設定將在 本論文第 4.4.6 小節做詳細說明。
TagID Name Class ID Crd status Time
P001 蘇雨聿 鋼筋工 A123456789 180,108 1 2010.3.25 14:6:15 P001 蘇雨聿 鋼筋工 A123456789 180,108 0 2010.3.25 14:6:20 P001 蘇雨聿 鋼筋工 A123456789 180,105 1 2010.3.25 14:6:20 P001 蘇雨聿 鋼筋工 A123456789 180,105 0 2010.3.25 14:6:25 P001 蘇雨聿 鋼筋工 A123456789 180,104 1 2010.3.25 14:6:25 P001 蘇雨聿 鋼筋工 A123456789 180,104 0 2010.3.25 14:6:30 P001 蘇雨聿 鋼筋工 A123456789 180,103 1 2010.3.25 14:6:30 P001 蘇雨聿 鋼筋工 A123456789 180,103 0 2010.3.25 14:6:35 圖 3-21 人員定位資料輸出格式
3.3 系統圖資結構
本系統透過物件顯示層、圖資矩陣層與影像圖層所建構而成之三層圖資結構來 表達施工工地之障礙與區域位置及施工人員移動狀況,如圖 3-22。第一層為物 件顯示層,用以顯示各種物件資訊,包括人員移動動畫之顯示、使用者劃分圖面 資訊之互動畫面以及各項圖面資訊提示等;第二層為圖資矩陣層,透過網格式資 料結構用以儲存施工工地各地點之障礙係數,以供系統判定障礙位置與穿越難 度,以提供最佳路徑之決擇;第三層為影像圖層,透過使用者載入之工地平面圖 之影像檔,其影像檔格式可包括*.gif、*.jpg、*.bmp、*.wmf、*.png 等常見影 像格式,於系統中顯示工地之圖片特徵,方便管理人員進行障礙、空間等圖資設 定。-- 物件顯示層
-- 圖資矩陣層
-- 影像圖層
系統圖資結構
圖 3-22 系統圖資結構 本系統圖資設定工具,即為此系統圖資結構中之影像圖層與圖資矩陣層進行 各種參數設定,並利用物件顯示層來輔助使用者完成各種圖資設定,本論文將在 4.4 章節中介紹各種圖資設定工具之功能與目的。使用者透過載入工地平面影像檔(*.gif,*.jpg,*.bmp,*.wmf,*.png…),本 系統即將網格式資料結構之圖資矩陣層,其網格數值全預設為「1」,即當前空間 中並無任何障礙(如圖 3-23),而網格數值即代表該空間中之障礙係數,障礙係 數為提供最佳路徑規劃之參考係數。由於營建工地空間包含許多不同種類之障礙 物,一般二維最短路徑演算法並不完全適用,例如原始 A*演算法在尋路過程只 可判斷「可通過」與「不可通過」,為配合實際工地環境,本研究針對障礙物另
再分為「不可通過障礙」(Hard obstacles)與「可通過障礙」(Soft obstacles),
「不可通過障礙」如牆璧、高危險度材料堆置區等人員不能或不可行經之地區; 而「可通過障礙」如施工機具堆放區、材料堆放區等雖有障礙物卻可通行之區域。 而障礙係數即為設定「可通過障礙」之通過難易度,障礙係數高低取決於通過障 礙道路所花費之時間、安全性、寬窄度或雜亂程度,目前尚無數學公式計算障礙 道路之實際障礙係數,其高低取自於管理人員經驗判斷。其網格圖中障礙係數設 定如下: •完全無法通過者為「0」 •完全無障礙物者為「1」 •雖有障礙但依然可通過的值>1,越大表示通過難度或花費時間越高 圖 3-23 圖資矩陣示意圖
3.4 A-Star 最佳路徑演算法
人員施工動線的順暢與否,對於營建工地的作業效率與施工安全具有相當程 度的影響。透過最佳路徑之規劃,可找出當前營建工地中空間分配之衝突點。本 研究路徑規劃之定義,為使用 A*最佳路徑演算法找出工地兩點間之障礙係數總 合最小之路徑。障礙係數最小,可表示人員行走時間最少或者碰撞機率最小亦或 是安全度最高之路線。配合人員定位與路線追蹤系統所記錄施工人員之路徑流量 與歷史軌跡相互比較,分析出差異之原因,做為檢討與改善之依據。 本系統所使用路徑規劃之 A*演算法,已在文獻 2.1.3 中已詳細介紹,本研 究配合工地實況,將原本僅分為可通過與不可通過之尋路原則,加上權重觀念, 即所謂障礙係數,將尋路原則稍做改變,將 g(n)與障礙係數相乘計算出新的 g(n) 值,藉以找出兩點間之障礙係數最小之路徑,其計算公式如下: target.y)] -t.y abs(curren + target.x) -nt.x [abs(curre * D = h(n) O.F. * distance ) ( ) ( ) ( ) ( n g n h n g n f 本節直接以含有可通過之障礙空間實例做為路徑規劃演算法之流程介紹,如 表 3-3,以(1,3)、(4,6)各為起、終點,網格中值「0」表示不可通過,「1」為 可通過且無障礙,大於 1 為可通過之障礙,越大表示通過難度或花費時間越高。 以下實例以計算週鄰 8 格 F、G、H 值,做為 A*最佳路徑規劃概念說明,過程步 驟有稍做簡化,雖與實際程式計算步驟稍有出入,但計算公式與尋路概念是一致 的。在附件一有本研究所使用之 A-Star 之程式原始碼。 0 0 0 0 0 0 0 0 3 1Step 1: 0 0 0 0 0 0 0 0 0 0 0 1 1 0 起點 70=20+50 → 0 0 0 1 1 74=14+60 ↙ 0 0 0 1 2 1 0 1 0 0 1 1 0 1 0 1 3 0 0 1 1 1 0 0 0 0 0 表 3-4 範例空間網格資料(2) 如表 3-4,由起點開始計算相鄰 8 格之 F 值,選擇最小值做為下一步起點, 並將此起點存入 CloseList。由此步可看到,雖然有兩條路徑,一條雖較難通過 但路徑較短,故跨越障礙行為最佳選擇。 Step 2: 0 0 0 0 0 0 0 154=34+70 ↗ 0 0 0 3 1 1 70=20+50 → 90=30+60 → 0 0 0 1 1 0 0 0 0 1 2 → 1 0 1 ↙ 0 0 1 1 0 1 X 1 3 0 0 1 1 1 0 0 0 0 0 表 3-5 範例空間網格資料(3) 如表 3-5,不計算 CloseList 與不可通過網格之資料,而 A*演算法規則中在 障礙轉折處不可直接通過,亦(3,4)網格在此步驟計算並不會存入 Open List, 故最後選擇(4,3)網格加入 Close List。
Step 3: 0 0 0 0 0 0 90=40+50 ↗ 0 0 0 0 3 1 2 → 90=30+60 → 0 0 0 0 1 ↗ 1 0 80=40+40 ↓ 0 0 1 2 → 1 → 0 1 ↙ 0 0 1 1 0 1 0 1 3 0 0 1 1 1 0 0 0 0 0 表 3-6 範例空間網格資料(4) Step 4: 0 0 0 0 0 2 → 1 → 0 0 0 0 3 1 0 80=40+40 ↓ 70=50+20 → 0 0 0 1 ↗ 1 0 70=50+20 ↓ 94=84+10 ↘ 0 1 2 → 1 → 0 1 ↙ 0 0 1 ↓ 1