Multi-Stage Weighted Interference-Cancellation Equalizer for
MIMO Systems
Chen-Chu Hsu Yumin Lee
Graduate Institute of Comm. Eng. AndDept. of Electrical Eng., National Taiwan University
Taipei 10617, Taiwan Abstract – In this paper, a new MIMO equalizer referred to as
weighted interference-cancellation equalizer (WICE) is proposed. WICE is a novel multi-stage equalizer that is similar to the MIMO decision-feedback equalization (DFE) in structure, but has better performance and is more immune to error propagation. WICE can be applied to both the single-carrier and spread-spectrum multi-user systems. Simulation results show that the proposed algorithm significantly outperforms the conventional MIMO signal processors in both the single-carrier and spread-spectrum scenarios.
I. INTRODUCTION
Multiple-input multiple-output (MIMO) signal processing techniques find their applications in many future high-speed, high-capacity wireless communication systems. Multiple access interference (MAI) and inter-symbol interference (ISI) are major capacity-limiting factors for MIMO communication systems. When the effect of MAI dominates, e.g., in synchronous direct-sequence code division multiple access (DS-CDMA) or multi-carrier CDMA (MC-CDMA), multi-user detection (MUD) and interference cancellation [1-4] are efficient techniques for performance improvement. However, when both MAI and ISI are significant, MIMO equalization may be necessary.
In this paper, we propose a new MIMO equalizer referred to as weighted interference-cancellation equalizer (WICE). WICE is a novel multi-stage equalizer that is similar to the MIMO decision-feedback equalization (DFE) in structure, but has better performance and is more immune to error propagation. WICE can be applied to both the single-carrier and spread spectrum multi-user systems. Simulation results show that the proposed algorithm significantly outperforms the conventional MIMO signal processors in both the single-carrier and spread spectrum scenarios.
II. SYSTEM MODEL
Consider a wireless communication system in which K (K≥1) users transmit signals simultaneously, and assume that D (D≥1) receivers are available at the output of channel. Assuming that the medium between the k-th user and the d-th antenna is a linear and time-invariant system corrupted by additive white Gaussian noise (AWGN) with two-sided power spectral density N0/2, the baseband-equivalent outputs
of the receiver filters can be expressed as
for d=1,…,D, where T, xi[n], ηd(t), and pi,d(t) respectively are the symbol period, n-th symbol of the i-th user, filtered Gaussian noise at the output of the d-th receiver, and baseband-equivalent channel impulse response seen at the output of receiver filter. The signals yd(t), d=1,…,D, are sampled at a rate of L samples per symbol period, resulting in discrete-time signals , 1 0 [ , ] ( ) K v [ ] [ , ] [ , ] d d i i d d i j l y l n y n T x n j p l j l n L = = η = − = − +
∑∑
(2) for l=0,1,…, L – 1, where , [ , ] , ( ) i d i d l p l j p jT T L = −.
(3)Note that we have assumed that pi,d[l,j] = 0 for n<0 or n>ν in (3).
III. WEIGHTED INTERFERENCE CANCELLATION EQUALIZER
From (2), we have
, ,
[ , ] [ , ] [ ] [ , , ] [ , ]
d k d k k d d
y l m n+ = p l m x n +I l m n +η l m n+ , (4)
for d=1,…,D, l=0,…,L-1, and m=0,…,ν, where Ik,d[l,m,n] is the MAI-plus-ISI seen while detecting xk[n] using yd[l,n+m] and is given by , , 1 0 ( , ) ( , ) [ , , ] K v [ ] [ , ] k d i i d i j i j k m I l m n x n m j p l j = = ≠ =
∑∑
+ − . (5)The operation of WICE is summarized as follows. First, we assume that in the s-th stage, hard decisions xˆ(s)[n]
k have
been obtained for xk[n] for all n. Furthermore, we assume that associated reliability weighting factors 0≤ωk(s)[n]≤1 have also been computed in the s-th stage for all n, and that
] [
) (s n k
ω is a monotonically increasing function of the probability of xˆ(s)[n]
k =xk[n]. In the (s+1)-th stage, for n = 0, 1, …, the MAI-plus-ISI in yd[l,n+m] is estimated using the latest available hard decisions multiplied by the associated reliability weighting factors and cancelled for d = 1 … D, l = 0 … L – 1, and m = 0 … ν. The results are then linearly combined using some coefficients and sliced to obtain the new hard decisions xˆ(s 1)[n]
k+ for xk[n]. Finally, the new associated reliability weighting factor ωk(s+1)[n] is computed and passed on to the next stage. Mathematically, in the (s+1)-th stage of WICE, for n = 0, 1,…, we first
( 1) ( ) ( ) , , 1 0 ( 1) ( 1) , 1 1 ˆ [ , , ] [ ]ˆ [ ] [ , ] ˆ [ ] [ ] [ , ] K m s s s k d i i i d i j K s s i i i d i j m I l m n n m j x n m j p l m n m j x n m j p l m ν ω ω + = = + + = = + ≡ + − + − + + − + −
∑∑
∑ ∑
(6) We next compute(
)
( 1) ( 1) , , , 1 ˆ [ , , ] [ , ] [ , , ] [ , ] s s d k d k d k d x l m n y l m n I l m n p l m + ≡ + − + %,
(7)and let the hard decisions be
1 ( 1) ( 1) ( 1) , , 1 0 0 ˆks [ ] Dec D L k ds [ , , ] k ds [ , , ] d l m x + n − ν ρ + l m n x + l m n = = = ≡
∑∑ ∑
% ,
(8)where Dec(·) is the decision function and ρk,d(s+1)[l,m,n] are real numbers referred to as path diversity weighting factors that satisfy
∑∑∑
= = = + = D d L l m s d k l mn 1 1 0 ) 1 ( , [, , ] 1 ν ρ . (9) Finally, we compute ωk(s+1)[n] to reflect the detection reliability of xˆ(s 1)[n]k+ . The procedure can be repeated for
as many stages as necessary. In WICE, ρk,d(s+1)[l,m,n] and ] [ ) 1 (s n k+
ω are jointly computed at each stage by minimizing an estimated symbol error rate.
Two points are noteworthy for WICE. First, it can be seen from (8) and (9) that WICE is an unbiased estimator. Secondly, (2) with ν = 0 can also be used to model MC-CDMA signals transmitted over frequency selective fading channels or DS-CDMA signals transmitted over flat fading channels. In these cases, L is the spreading factor and pi,d[l,0], l = 0 … L – 1, is the signature waveform (including the effect of the channel) of the i-th user observed at the d-th receiver antenna. Therefore WICE is equally applicable to MC-CDMA and DS-CDMA.
IV. RELIABILITY AND PATH-DIVERSITY WEIGHTING FACTORS
The reliability and path-diversity weighting factors for the WICE are derived by first recognizing that the detected symbol of the k-th user at s-th stage can be expressed as
( ) ( )
ˆ [ ]s s [ ] [ ]
k
k k
x n =m n x n . (10) where mk(s)[n] is an equivalent multiplicative noise introduced to model decision errors. For WICE, the path-diversity weighting factors and reliability weighting factors are then derived by minimizing the estimated probability of detection error of each user at every stage. Detailed derivations are given in the Appendix. It can be shown that the weighting factors are functions of pi,d[l,j], and can be computed as follows. Initially, let ωk(0)[n] = 0 for k = 1, 2, …, K and for all n. The reliability weighting factors and path-diversity weighting factors for WICE are then computed from s = 1 to s = S using the following recursions:
For k = 1 … K:
1. Determine a set of linear path-diversity combining weights ψk(s)[n], defined in (A.12) and (A.13), using (A.34).
2. Compute ( )2s k
σ [n] using (A.23), and set the reliability weighting factor to − = ] [ 1 2 1 ] [ ( ) ) ( n Q n s k s k σ ω
,
(11)where Q(•) is the Gaussian tail function defined as
( )
1 exp 1 2 2 2 x Q x t dt π ∞ = − ∫
.
(12) for x > 0. V. SIMULATION RESULTSThe performance of WICE is evaluated by computer simulation. Information bits from each user are modulated using binary phase shift keying (BPSK). Perfect channel estimation is assumed in all simulations. Unless otherwise stated, the channel taps are assumed to be i.i.d. complex Gaussian distributed with mean zero and variance 1/(ν+1). Fig. 1 shows the average bit error rate (BER) of the single-carrier case as functions of Eb/N0 for K=5, D=3, ν=2,
and L=1, where Eb is the transmitted energy per user bit. Furthermore, performance of the conventional MIMO DFE is simulated as baseline for comparison. In the conventional DFE, the numbers of matrix taps in the feedforward and feedback filters are respectively ν+1 and ν, and the filter coefficients are determined according to the MMSE criterion. It can be seen from Fig. 1 that WICE significantly outperforms the conventional DFE. Moreover, significant improvement can be achieved by adding more decision stages.
Fig. 2 shows the average BER of the single-carrier case as functions of Eb/N0 for K=1, D=1, and L=1. It can be seen
that the performance gain of WICE over the conventional DFE is more significant for ν = 4 than for ν = 1. This is because a channel with ν=4 suffers more from ISI.
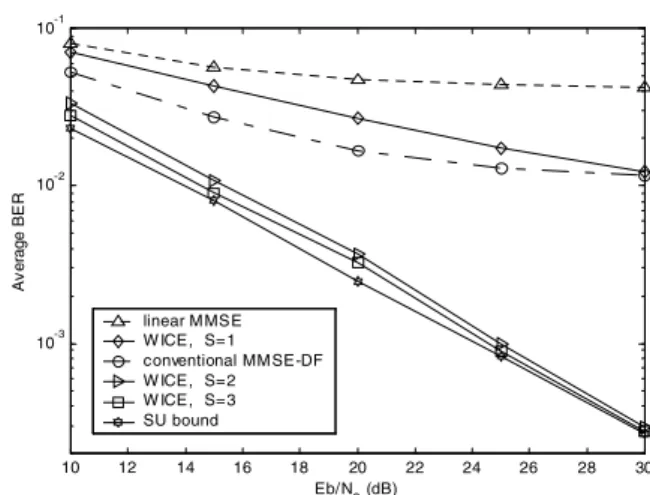
Fig. 3 shows the average BER of WICE as functions of Eb/N0 for a DS-CDMA system operating over the Rayleigh
flat-fading channel under the conditions of K=30, D=1, ν=0, and spread using short scrambling sequences with spreading gain L = 32 as defined in [5]. It can be seen from Fig. 3 that WICE significantly outperforms the conventional linear MMSE and MMSE decision-feedback (MMSE-DF) multi-user detectors, and achieves a performance very close to the theoretical single user bound (SUB) within a few stages.
VI. CONCLUSION
A multi-stage equalizer referred to as weighted interference cancellation equalizer (WICE) is proposed in this paper. In
WICE decisions are weighted by reliability weighting factors when forming MAI-plus-ISI estimates. An algorithm is also proposed to systematically and jointly optimize the path-diversity weighting factors and reliability weighting factors. Simulation results show that the proposed algorithm significantly outperforms the conventional MIMO signal processors in both the single-carrier and spread-spectrum scenarios. Moreover, in DS-CDMA, WICE achieves a performance very close to the theoretical single user bound (SUB) within a few stages.
RERFERENCES
[1] S. Moshavi, “Multi-user Detection for DS-CDMA Communications,” IEEE Commum. Mag., pp. 124-136, Oct. 1996.
[2] Sergio Verdu, Multiuser Detection, Cambridge University Press, 1998. [3] Divsalar, D.; Simon, M.K.; Raphaeli, D, “Improved parallel interference
cancellation for CDMA,” IEEE Transactions on Communications, Volume: 46 Issue: 2, P.258 –268, Feb. 1998.
[4] Chen-Chu Hsu and Yumin Lee, “A New Multi-Stage Weighted Interference Cancellation Multiuser Detector With User Ordering for DS-CDMA,” IEEE WCNC, 2003.
[5] 3G TS 25.213 V4.1.0 “3rd Generation Partnership Project; Technical
Specification Group Radio Access Network; Spreading and modulation
(FDD) (Release 4)”, 2001-06. http://www.3gpp.org.
[6] Simon Haykin, Adaptive Filter Theory, 2nd ed. Prentice-Hall, Inc, 1991.
[7] Henry Stark, John W. Woods, Probability, Random Processes, and Estimation Theory for Engineers, 2nd ed. Prentice-Hall, Inc, 1994.
APPENDIX
In this Appendix we derive the reliability weighting factors and path-diversity weighting factors for WICE. As mentioned earlier, the decision of the k-th user at the s-th stage can be expressed as
( ) ( )
ˆks[ ] ks[ ] [ ]k
x n =m n x n , (A.1)
where mk(s)[n] is a discrete random variable with at most M 2 possible values, where M is the cardinality of the signal constellation. Although the derivations to be presented can be extended to the general case, in the following we assume, for simplicity, that xk[n] = 1 or –1 with equal likelihood for all k. In this case, we have
( ) ( ) ( ) 1 with probability [ ] [ ] 1 with probability 1- [ ] s k s k s k p n m n p n − = , (A.2) where
(
)
( )s[ ] Prob ˆ( )s[ ] [ ] k k k p n = x n ≠x n . (A.3) From (2), we have [ ] [ ] [ 1] [ ] [ ] [ 1] [0] [ ] [ ] n n n n n ν ν ν ν − − + = − + x x y p p p η x L M , (A.4) where 0 1 2 3 4 5 6 7 8 9 10 10-3 10-2 10-1 Eb/N 0 (dB) A v erage B E R conventional DFE, Nf=3 W ICE, S=1 W ICE, S=2 W ICE, S=3 W ICE, S=4Fig. 1 Comparison of WICE and the conventional DFE under the condition of K=5, D=3, L=1, and ν=2. 0 1 2 3 4 5 6 7 8 9 10 10-2 10-1 E b/N0 (dB) A v erage B E R conventional DFE, v=1 W ICE, v=1, S=3 conventional DFE, v=4 W ICE, v=4, S=3
Fig. 2 Comparison of WICE and conventional DFE under the condition of K=1, D=1, and L=1. 10 12 14 16 18 20 22 24 26 28 30 10-3 10-2 10-1 Eb/N 0 (dB) A v erage B E R linear M MSE W ICE, S=1 conventional MM SE-DF W ICE, S=2 W ICE, S=3 SU bound
Fig. 3 Comparison of WICE, linear MMSE, and MMSE-DF multi-user detectors in synchronous DS-CDMA system with K = 30, D = 1, and L = 32.
(1) 1 (2) 2 ( ) ( ) [0, ] [ ] [ ] [1, ] [ ] [ ] [ ] , [ ] , [ ] [ 1, ] [ ] [ ] d d d D d K y n x i n y n x i n n n i y L n x i n ≡ ≡ ≡ − y y y y x y M M M , (A.5) (1) (1) (2) (2) ( ) ( ) ( ) [0, ] [ ] [ ] [1, ] [ ] [ ] [ ] , [ ] , [ ] [ 1, ] [ ] [ ] d d d D D d n n j n n j n n j L n n j η η η ≡ ≡ ≡ − η p η p η η p η p M M M , (A.6) and 1, 2, , 1, 2, , ( ) 1, 2, , [0, ] [0, ] [0, ] [1, ] [1, ] [1, ] [ ] [ 1, ] [ 1, ] [ 1, ] d d K d d d K d d d d K d p j p j p j p j p j p j j p L j p L j p L j ≡ − − − p L L M M O M L
.
(A.7) Stacking y[n] into a [(ν+1)LD]×1 super-vector, we have[ ] [ 1] [ ] n n n n n n ν + ≡ = + + y y Y PX N y M , (A.8) where [ ] [ ] [ 1] , [ ] [ ] [ ] n n n n n n n n ν ν ν − + ≡ ≡ + + x η η X x N η x M M M , (A.9) and [ ] [ 1] [0] [ ] [ 1] [0] [ ] [ 1] [0] ν ν ν ν ν ν − − ≡ − p p p p p p P p p p L L O O O O L
.
(A.10) Substituting (A.8) and (A.9) into (8), we have{
}
( ) ( ) ( ) ˆks[ ] Dec ks T[ ] ks[ ] x n ≡ Ψ nX% n,
(A.11) where ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) [0, ] [0, ] [1, ] [1, ] [ ] , [ ] [ , ] [ , ] s s k k s s s k s k k k s s k k n n n n n n n n ν ν ≡ ≡ x ρ x ρ X Ψ x ρ % % % M M %,
(A.12) in which ( ) ( ) ,1 ,1 ( ) ( ) ,1 ,1 ( ) ( ) ( ) , ( ) , [0, , ] [0, , ] [ 1, , ] [ 1, , ] [ , ] , [ , ] [0, , ] [ 1, , ] s s k k s s k k s s k k s k D k s k D x m n m n x L m n L m n m n m n x m n x L m n ρ ρ ρ − − ≡ ≡ − x ρ % M M % % M M % M % ( ) , ( ) , [0, , ] [ 1, , ] s D s k D m n L m n ρ − M.
(A.13)Furthermore, X%( )ks[ ]n in (A.11) can be denoted by
( ) ( ) , 1 [ ] [ ] 1 s s k k k k k n d n k n = + + X% M P PX% P N%
,
(A.14)where P%k is a [(ν+1)LD]×[(ν+1)LD] diagonal matrix given by 1, 2, ( 1) , 1/ 1/ 1/ K k K k k LD K k P P P ν ν ν ν + + + + = P% O
,
(A.15)while X( )k ns, is a K(2ν+1)×1 vector denoted by
( ) ( ) ( ) ( ) ( 1) ( 1) 1 1 , T s s s s s s n n n n n k n= −ν − ′ +− +−ν X x L x x x L x
,
(A.16)in which xq( )l and xn′( )s are 1 × K matrices respectively given by
(
( ) ( ))
(
( ) ( ))
( ) 1 1 1 1 l[ ] l[ ] [ ], , 1 l[ ] l[ ] [ ] l q = −ω q m q x q −ωK q mK q x qK x L,
(A.17) for q = n-ν,…, n-1, n+1,…, n+ν, and(
)
(
)
(
)
(
)
( ) ( ) ( ) ( ) ( ) 1 1 1 1 1 1 ( 1) ( 1) ( 1) ( 1) 1 1 1 1 [ ] [ ] [ ], , 1 [ ] [ ] [ ], 0, 1 [ ] [ ] [ ], , 1 [ ] [ ] [ ] s s s s s n k k k s s s s k K K K k k n m n x n n m n x n n m n x n n m n x n ω ω ω ω − − − − − − − − + + ′ = − − − − x L L.
(A.18) Since dk[n], ρk,d(s)[l,m,n], and mk(s)[n] are real numbers, we assume that ωk(s)[n] is also real. Dropping this assumption leads to the same result, but the derivation is more tedious. The real part of the quantity in the curly braces of (A.11) is given by ( ) ( ) ( ) , , [ ] [ ] s s s k k k n k n x%% n =x n +I +N,
(A.19) where{
}
( ) ( ) ( ) , Re [ ] , s s T s k k n k k n I = Ψ nP PX%(A.20) and
{
}
( ) ( ) , Re [ ] s s T k k k n k N = Ψ nP N%.
(A.21) Assuming that( ) ( )
( ) ( ) , , 0 for s s k n i k n j E = i≠j X X (A.22)
and mk(s)[n] is independent of xk[n], the variance of Ik,n(s) + Nk,n(s) is given by ( )2 ( ) ( ) 0 ( ) , [ ] [ ] [ ] 2 s s T s s k k k k n k N n n n σ ≡ + Ψ M B Ψ
,
(A.23) where(
)
( ) ( ) , Re , Re T s s k k k n≡ k n M P P Ω% P P%,
(A.24) H k≡ k k B P P% %,
(A.25) and ( ) ( ) ( ) , , ( 1) 1 s n s s k n k n s n ν − − + ′ ≡ δ Ω ω δ,
(A.26) in which ω’k,n(s) and δq(l), for q = n-ν or n+1, are Kν×Kν and K×K diagonal matrices respectively given by( )
(
)
(
)
2 ( ) ( ) ( ) ( ) , , 2 ( 1) ( 1) ( 1) 1 2 [ ] [ ] [ ] for 0 for 1 2 [ ] [ ] [ ] for s s s k k k s k n j j s s s k k k n E m n n j k j k n E m n n j k ω ω ω − − ω − − + < ′ = = − + > ω ,
(A.27) ( ) ( ) ( ) 1 ( ) 1 l q l l q q l qν + + − ≡ ω ω δ ω O,
(A.28) and( )
( )
2 ( ) ( ) ( ) 1 1 1 ( ) 2 ( ) ( ) ( ) 1 2 [ ] [ ] [ ] 1 2 [ ] [ ] [ ] l l l l t l l l K K K t m t t t m t t ω ω ω ω − + ≡ − + ω O(A.29) for t = q,…, q+ν-1, and l = s or s-1. Furthermore, by the central limit theorem, when K or ν is large Ik,n(s) and Nk,n(s) approach independent zero-mean Gaussian random variables in distribution. Thus ( ) ( ) 1 [ ] [ ] s k s k p n Q n σ =
(A.30) where Q(•) is the Gaussian tail function defined in (12). Hence, from (A.2) we have
( ) ( ) 1 [ ] 1 2 [ ] s k s k E m n Q n σ = −
.
(A.31) It is desirable to minimize the average probability of error of the S-th stage given by(
( ))
1 1 ˆ [ ] [ ] [ ] K S av k k k P n prob x n x n K = ≡∑
≠.
(A.32)(A.23) to (A.31) can be used recursively to express Pav[n] in terms of all weightings, and in principle path-diversity combining weighting factors and reliability weighting factors that minimize Pav[n] can be jointly found. Unfortunately, this task is mathematically intractable. A more practical approach is to optimize them on a stage-to-stage basis by minimizing (A.23). In this case, the “optimal” reliability and linear combining weightings subject to (9) can been jointly determined using standard minimization techniques [6,7]. The solution is given by
( )l[ ] ( )l[ ] q j E mq j ω =
(A.33) for q = 1,…, K, l = s or s-1, j = n-ν,…, n+ν, and 1 1 1 ( ) (min) 0 (min) 0 , , , , , 1 1 [ ] 1 1 2 2 1 1 s k k k opt k s n k s n N N n − − − ≡ + + Ψ L M B M M B M (A.34) where
(
)
(min) (min) , , Re , , Re T k k k s n ≡ k s n M P P Ω% P P%,
(A.35) and (min) , (min) (min) , , , , (min) 1, 1 s n k s n k s n s n ν − − + ′ ≡ δ Ω ω δ,
(A.36) in which ω’k,s,n(min) and δs,q(min), for q = n-ν or n+1, are Kν×Kν and K×K diagonal matrices respectively given by(
)
(
)
(
)
2 ( ) (min) , , , 2 ( 1) 1 [ ] for 0 for 1 [ ] for s k k s n j j s k n j k j k n j k ω ω − − < ′ = = − > ω,
(A.37) (min) , (min) (min) , 1 , (min) , 1 l q l q l q l q ν + + − ≡ ω ω δ ω O,
(A.38) and( )
( )
2 ( ) 1 (min) , 2 ( ) 1 [ ] 1 [ ] l l t l K t t ω ω − ≡ − ω O(A.39)
for t = q,…, q+ν-1, and l = s or s-1. The corresponding minimum value of (A.23) is given by
1 1 ( )2 (min) 0 ,min , , 1 [ ] 1 1 2 1 s k k k s n N n σ − − = + M B L M
.
(A.40)Note that the reliability weighting factors in (A.33) minimize (A.23) for any given linear path-diversity combining weightings. Therefore, if the optimal reliability weighting factors given in (A.23) are used, we can substitute (A.33) into (A.30) to estimate the BER for any given linear path-diversity combining weightings. It should also be noted that (A.33) is derived based on the assumptions in (A.22), which do not hold in general. However, using the reliability weightings in (A.33) avoids mathematical intractability and still achieves good performance as shown by computer simulations.