Nonlinear Input Mapping in Fuzzy Control Systems
Chiy-Ferng, Perng', Student MemberIEEE,
Sinn-Cheng, Lin', Student Member IEEE,and Yung-Yaw, Chen', Member IEEE
Electrical Engineering Department, National Taiwan University
Taiwan, R.O. C.
1. Rm. 202, Electrical Engineering Dept., National Taiwan University, e-mail: [email protected]
Abstract
The input scaling factors in a fuzzy control system are often used as
a
transformation from the real input data to the desired space. Sometimes, they are tuned for better performance just as the coefficients in a PID controller. Theoretically, they are constant and should be adjusted for better performance while the operating point is changed. In this paper, we suggest nonlinear mapping functions to substitute the role of input scaling factors. The results will show how the nonlinear mapping function work and the performance could be better by proper adjustment. It is also noticed that such mapping will change the shapes of the membership functions. That means we need not to tune every membership function of linguistic variables, and just to choose a proper nonlinear mapping function could reach the same effects. In this paper, we used a inverted pendulum system to verify the results.1.
Introduction
Since the introduction of fuzzy set theory by Zadeh 171, fuzzy set theory has been applied in many fields successfully Fuzzy control is one of these fields. After Mamdani use a controller based on fuzzy linguistic rules to control a steam engine [SI, fuzzy control theory did not only be developed in the laboratory but also get into the real world. Especially in Japan, such as washing machines, vacuum cleaners, auto-focusing cameras, etc., have adopted fuzzy control to promote their performance. [6] "Fuzzy" becomes a magic word and could increase the value of the merchants.
A hzzy controller often composes of four parts
-
a input-output Interface, a rulebase, a database, and an inference engine. The I/O interface is also described as a fuzzification and defuzzification procedure. It will interpret the linguistic meanings of0-7803-2559-1/95
$4.00
0
1995 IEEE
430
input and output of a fuzzy controller. The rulebase is the soul of the controller. It is in charge of control motions. The database stores the necessary coefficients or data in the controller. The inference engine collects the input data to calculate the appropriate actions. The performance of a fuzzy controller depends on the design of the rulebase. The basic idea is to make use of the knowledge of field experts and transform the knowledge into linguistic if-then rules. Fuzzy control does not involve complex mathematical model. More often, it depends on the instinct of designers.
To design a fuzzy control rulebase, the definition of fuzzy linguistic term such as small, large, should be given on the universe that the state really happens. For convenience, the strategy to normalize a state space within the domain [-1,1] is common. Through input scaling factors, normalizing strategy can easily transform the actual variables into normalized variables. There are several papers [2] [3] [4] which discussed the effects of input scaling factors. There are also several learning fuzzy controller that achieve the optimal performance by tuning the scaling factors. 141 151 In fuzzy controllers, tunable parameters include membership function location, vertex, etc. Input scaling factors are just one of them. In these cases, input scaling factors are constant. Changing them did not change the shape of a membership function. And compared with the actual rulebase, the relative location would not vary with the input scaling factors. Scaling factors just magnify the scale proportionally.
Based on the work of Chen and Perng [SI, change of input scaling factors is the same as change of the universe of discourses. On the other hand, the rulebase is also changed. Learning procedure also changes the rulebase. Constant input scaling factors do not adjust the shapes or positions of the membership functions of linguistic variables but nonlinear mappings could because the gains are
different everywhere. If we choose a proper nonlinear mapping function, the rulebase could be adjusted as desired.
Fuiiificdion
11.
Nonlinear Mapping Strategy
The basic structure of a fuzzy controller with input scaling factors GE and GD is shown in figure 1.
c inference Defumficahon Engme
iDatabase'Hpdeba;e)
fig. 1 the basic structure of a fuzzy controller GE and GD play important roles in tlie controller. They are responsible for adjusting tlie scale of input errors and differential errors suitable for the normalized space. After multiplying the scaling factors, tlie scale of the rulebase is changed:
I ht Aa A 3 I Ai Aa 8 3
c c c: fig.2 The transformation of rulebase under linear Although the position of the membership function shift into the normalized domain, the relative position to tlie other linguistic terms remain unchanged and the shapes are the same. That means input scaling factors did not affect structure of the rulebase. If the input scaling factors are different in different domain, that is to say the gains of inputs are different eveqwhere and the structure will change.
input scaling factor
Database Rulebasc
EbEI
fig. 3 Nonlinear mapping fuzzy controller
Nonlinear Mapping
fig.4 Membership function changed under nonlinear mapping
In figure 4, the nonlinear mapping function is: input : x
output: .y
nonlinear mapping function:
y = 1-41-x2 (1)
We use this nonlinear mapping function to test how it change the shape of a menibership function. It is obvious that tlie position and the shape of the membership function has changed. If different menibership functions could deduce different performance, using nonlinear mapping properly, we can get suitable membership function to achieve better performance, The following block diagram is flow chart of the control motions under nonlinear mapping.
Desired
Fry
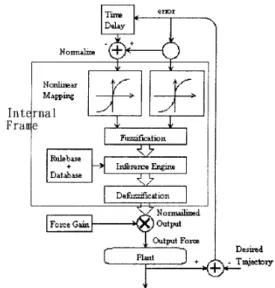
fig. 5 The flow chart of nonlinear mapping fuzzy controller
At first, input signals should be normalized. After normalized, signals enter the nonlinear mapping function and they are mapped into a new domain. Then the new signals flow into the internal frame. The mapping procedure is the major part of the internal frame. This procedure is critical for the rulebase. In fact, the internal franie is similar to a standard fuzzy controller. Because of the nonlinear mapping function, the rulebase changed while observed from outside. The computation inside the internal franie is the same with other fuzzy controllers. Because the inputs are normalized, we inclined to normalize the output signals. It should be multiplied by a constant gain. In the following section, we will show the simulation results.
111.
Simulation Results
The plant is an inverted pendulum showed in figure 6. In this siniulation, we ignored the cart position and the cart velocity. The pole angle and
angular velocity are considered. The parameters of the inverted pendulum system are as follows: length of the pole I=0.5m,
mass of the pole mp=0.3kg, mass of the cart mc=0.5kg,
friction coefficient of pole pp=0.000002, friction coefficient of cart p =0.0005.
-
Pff
Mapping functiun order. k=2
I ,
50 1GU 150 200
Time step, II 01 wcfstep
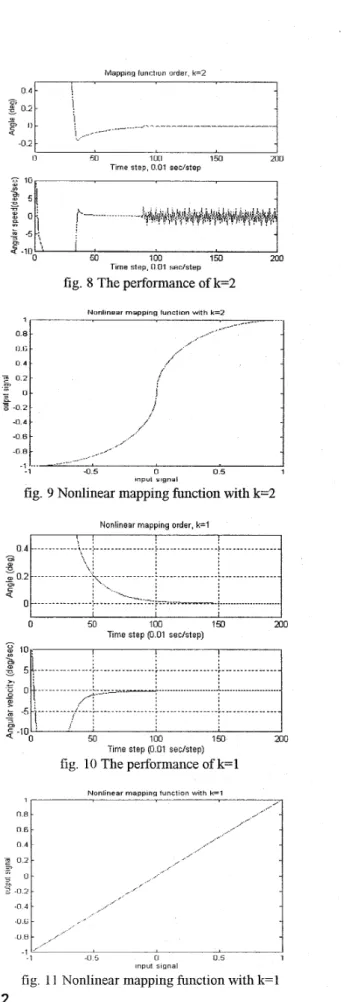
fig. 8 The performance of k=2 fig.6 Inverted pendulum system
The dynamical equation of the pendulum and the cart can be found in [l]. Suppose the domain of interest of the pole angle CJ is between -12 degrees and 12 degrees and the pole angular velocity is between 200 deg/sec. The rulebase of the internal frame fuzzy controller is shown as follows:
Nonlrnsar mapping function with k=2 _.--- ,.. I 0 4 2 0.2 a - 0 2 .-
5
U[ Y -0.5 U 5 ,"put signalfig. 9 Nonlinear mapping function with k=2
fig. 7 Rulebase of the fuzzy controller The nonlinear mapping function is:
if x 2 0 , then if x< 0, iiien
Y -
GGT-
(2)v
= - ( d1-I
x+
Ilk ) (3 ) where k is a constant to decide the shape of the nonlinear mapping function.Figure 8, 1 0 , 12, 14 are performance plot of
k=2, 1, 0.75 and heuristic varylng k individually Figure 9, 11, 13, 15 are the shape of nonlinear mapping function of k=2, 1, 0.75, and varying k individually.
In figure 8. 10, 12, 14, there are two plots in each figure. One is angle vs. time and the other is angular velocity vs. time. For convenience, the magnitude shown is limited. We curtailed some data such that we can indicate the settling time clearly. Every time step means 0.01 second in the real worlds. The simulation software is MATLAB.
Nonlinear mapping order, k=l
I I
0 50 100 150 MO
l i m e step (0.01 secktep)
I I I
50 100 150 200
Time step p 01 secktep)
fig. 10 The performance of k=l
I
-U 5 0 U S 1
Input 519"181
Mipping function order. k=U 75
0 50 100 150 200
Time step, 0 01 sedstep
0 50 100 150 21x1 250 300 350 400 450
Time step, 0.01 sedstep
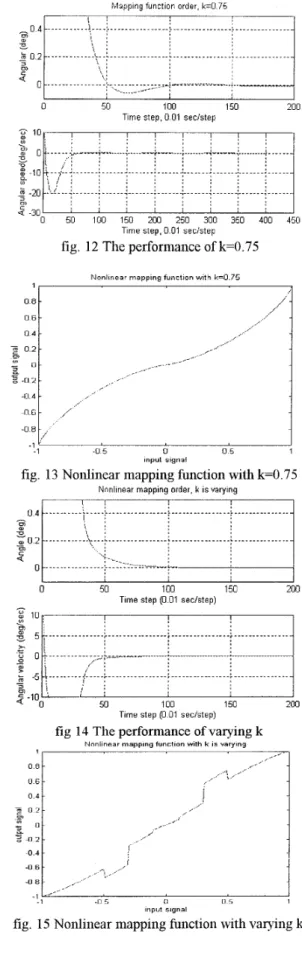
fig. 12 The performance of k=0.75
Nonlinear mapping function with k=0.75
U 8 -
0 6 -
0 4 -
1 -U 5 U 0 5 lnpul signal
fig. 13 Nonlinear mapping function with k=0.75
Nnnlinear mapping order. k is varying
I I
0 50 100 150 2on
Time step (0 01 secistep)
I
...
... ... ... ...
0 50 100
Time step (0 01 secistep)
fig 14 The performance of varying k Nnnlinear mapping function with k 45 varying
fig. 15 Nonlinear mapping function with varying k
IV
Discussions
From the performance plots, we can conclude that higher k can speed up the convergence but it would induce the oscillation around the equivalent point. The shape of the nonlinear mapping function while k is 2 shows that it will map the domain surrounding the zero into a greater domain in the new space. If the states are getting close to the central area, through nonlinear mapping, the new states in the new domain would be a little far away from the equivalent point. That means the fired rules would not be the original central rules. Even the states are near the equivalent point and the force should close to zero. Because of the nonlinear mapping, the force would be larger than what we desired. This action would induce oscillation around the equivalent point. On the other hand, if the states are a little far away from the origin, the fired rules would be those locating at the edge of the state space. Generally speaking, these rules often use full strength such that the plant could be push back to the central area. The speed of convergence would be faster. Lower k could reduce the oscillation of the system, but the speed of convergence also reduced. Because the nonlinear mapping function will condense the domain surrounding the equivalent pint, the number of fired rules will be smaller. The relative output will also be smaller. This action will slow down the convergence. For accelerating the convergent speed and avoiding the system from oscillating, varying k is a good strategy. When the states are still far away from the equivalent point, higher k could make the system behave forward the equivalent point. When the states are behaving forward zero readily, k needs to be reduced such that the oscillation of the system would not happen. In our simulation, when the normalized inputs are greater than 0.5, k is 1.2. Inputs are greater than 0.3 but smaller than 0.5 and k is 1.5. Inputs are greater than 0.1 but smaller than 0.3 and k
is 1. Inputs are smaller than 0.1 and k is 0.9. This is a heuristic scheme. From the figure 14, the performance is indeed better.
V. Conclusions
The nonlinear mapping function could change the shape and position of a linguistic term in the ndebase. From the simulation, choosing the function properly, the performance of a fuzzy controller could be improved. The problem is how to decide the nonlinear function. As generally known, learning algorithm could increase the performance of the fiizzy controller. For the same reason, we can also use learning algorithms to learn the nonlinear function. Self-learning could be the solution to solve the problem of how to choose nonlinear function.
References
[l ] Y.-Y. Chen, "Global analysis of fuzzy dynamical systems". Ph. D. thesis, University of California, Berkeley, 1989
[2] W. Bare, R. Mulholland, and S. Sofer, "Design of a self-tuning rule based controller for a gasoline refinery catalytic reformer",
IEEE
Trans. of Automatic Control, Vol. 35, pp. 156-164, 1990[ 3 ] M. Braae and D. A. Rutherford, "Selection of parameters for a fuzzy logic controller", Fuzzy Sets and Systems, Vol. 2, pp. 185-199, 1979 [4] M. Maeda and S. Murakami, "A self-tuning fuzzy
controller", Fuzzy Sets and Systems, Vol. 51, pp.
[5] T. Procyk and E. Mamdani, "A linguistic self- organizing process controller", Automatica, Vol. [6] M. Sugeno ed., Industrial applications of fuzzy
control, 1986
[7] Zadeh, L. A., "Fuzzy Sets", Information and Control, pp. 338-353, 1965
[8] Y.-Y. Chen and C.-F. Perng, "Input scaling factors in fuzzy control systems", IEEE-FUZZ 1994
29-40, 1992