n
method for
fur
C.-L.ChenC.-T. Hsieh
Indexing terms: Fuzzy logic control, Fuzzy sets, Shrinking-span membership functions
Abstract: A new means for designating membership functions in a fuzzy logic controller (FLC) is presented. The method allows a novice to construct a set of membership functions, called shrinking-span membership functions (SSMFs), for a specific linguistic variable systematically by using only two parameters: number of elements of the term set and the shrinking factor for that linguistic variable. The SSMFs have different spans for various term set elements in the universe of discourse and this gives the FLC more power to deal with the nonlinearity of the control problems encountered in the real applications. When there is not enough domain knowledge about the process, the SSMFs make it possible for a designer to set up a reasonable and practical rule base for the FLC. According to the computational simulations presented, the satisfactory performance of such an FLC for several test problems can be acquired without laborious optimisation of the tuning parameters. Therefore the proposed approach narrows the gap between a theoretical F L C and a practical one and makes the FLC more down-to-earth.
1 Introduction
People very often make decisions in their daily lives based on qualitative information. Zadeh’s fuzzy sets [ 11 theory was thus proposed to enable people to describe and formulate the linguistic mental models apparent in daily life behaviour.
Mamdani and colleagues [2, 31 were pioneers in applying fuzzy techniques to process control. Their results, as well as those of many other researchers, have demonstrated the potential value of the fuzzy logic con- trol system on simple process dynamics. A comprehen- sive review of the classical design and implementation of the fuzzy logic controller (FLC) can be found in [4]. More advanced design techniques have also been reported in literature, such as the adaptive hierarchical fuzzy controller [5] and the fuzzy logic controller with multiple inputs [6].
The superior performance of FLC as reported in lit-
0 IEE, 1996
IEE Proceedings online no. 19960393
Paper first received 16th October 1995 and in revised form 6th February 1996
The authors are with the Department of Chemical Engineering, National Taiwan University, Taipei 10617, Taiwan, Republic of China
erature is usually conjectured to have its origin in their switching nature [7], where the magnitude of the rate of change in controller output is greater for larger error but smaller for process output close to set point. The relations between fuzzy and conventional three-mode (proportional-integral-derivative, PID) controllers have been studied in [8, 91 and other works.
To simplify the analysis of the FLC, most researchers prefer to use simple triangular functions, especially the equal-span isosceles, as the membership functions of the FLC. However, the membership functions of the F L C in most of the real applications are constructed by using knowledge of domain experts, and for the pur- pose of obtaining a good control result, these member- ship functions often come out with various physical shapes. Intuitively, when the control response is closer to the set point, the corresponding membership func- tion for the specific linguistic variable should have a narrower range. Chen [lo] has confirmed this by apply- ing neural-network training techniques to an FLC.
In this article, we propose a systematic approach to construct membership functions for the FLC. By using this method, the designer of an FLC assigns only the number of elements of the term set and the shrinking factor for a specific linguistic variable and then obtains a series of well-located membership functions.
Such shrinking-span membership functions (SSMFs) not only make themselves more reasonable from the human experts’ point of view but also provide the FLC the ability to easily adapt to different control systems by slight modification. After incorporating SSMFs into the FLC structure, the FLC, designated as SSMFs- FLC, can therefore generate large and fast control actions when the system output is far from the set point and only make moderate and slow changes when the system output is near the set point. Such behaviour saves a lot of time in optimising the scaling factors in the design procedures, and this reduces the difficulties in implementing an FLC and makes it more robust in real operational environments.
2
Complete and thorough descriptions of the design pro- cedure for an FLC have been presented [l 1, 121 there- fore only the essential materials and notations are stated here as a fundamental work.
Basic design procedures of FLC
2.
I
Rule
base
The rule base is formed by a family of linguistic rules that describes the relationship between the input and output variables of the controller. In the case of I-
inputs single-output fuzzy systems, for example, the j t h control rule in the rule base with J rules can be
IEE Proc.-Control Theory Appl., Vol. 143, No. 4, July 1996 358
expressed as
Rj : IF 2 1 is A I , AND 2 2 is
Az,
AND . . .(1)
AND X I is
AI,
THEN y isBj
where xi (i = 1
-
I>
is the process state linguistic varia- ble defined on the universe of discourse Uxi with term set Tx,, Ai, (j = 1-
J)
is the linguistic value ofxi
with Ai, E Tx,. y , Uy, Ty and Bj are the counterparts ofxi,
UX,,
Txi andAi,
for control action. We name the repre- sentation method described in eqn. 1 the sequence rep- resentation of the rule base.2.2 Decision making logic
The individual-rule based inference ( [ I l l p. 94) is employed and modified here to cope with the inference of fuzzy sets. In this approach, a four-steps operation is proposed to accomplish the inference procedure ([ 121 Section 4.3):
.
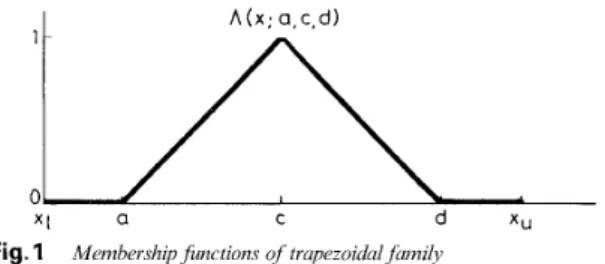
A ( x ; a,c,d)
Fig. 1 Membership functions of trupezoidul jumily
Step 1: Computing the level of matching Ai,(x,T)
between the crisp input value xi* and linguistic value Ai,:
A i j ( ~ , * )
M(x,*;
Aij) ( 2 )M maps a crisp input value to a membership degree subjected to a specific membership function. Following [ 131 (let
xI
= inf U,, xu = sup U,), function A is used here to construct the membership functions used in this research (see Fig. 1)( 0 f o r x l < z < a for a
5
2<
c{
f o r c ( x ( d A ( z ; a , e, d ) = H(z; a, e, e, d ) =21;
( 0 f o r d < n : < x , ( 3 )Step 2: Finding the firing level
qj
of each of the rules in the rule base:(4) In the Mamdani-FLC, F is the MIN aggregating oper- ator. However, it can be replaced by other triangular norms (t-norms for short) [14].
Step 3: Deciding the output fuzzy set B> of each rules. The formulation that determines how Q j and the fuzzy
set Bj interact to form the rule output is called a fuzzy implication. Here, I denotes this operation.
I
i= 1
d ) j = F ( A i j (x?), . . .
,
A I , ( 2 ; ) ) = F (AZ3 (.,*))B : ( d =
W , > % ( Y ) )
( 5 ) I is usually implemented as the MIN or the product though other t-norms are possible.Step 4: Aggregating the individual output fuzzy sets
B)s to form the overall system output fuzzy set B.
Operator A, usually implemented as the MAX or the summation, is used here:
J ,=1
B(Y) = A(B: (?I), . . .
,
%(Y)) = ,A ( B ~ ( Y ) ) (6)IEE Proc.-Contvol Theory Appl., Vol. 143, No. 4, July 1996
2.3 Defuzzification interface
The defuzzification operator D converts the fuzzy set B into a single crisp value y*, i.e.
Y*
=D(B(Y))
( 7 )
Centre of area/gravity (COA or COG for short) method is the most popular scheme used to calculate the crisp value [l I]:
In short, the crisp control action y* of an FLC can be obtained by a series of operations:
3
membership functions
From the description of previous Section, one would find that a lot of design parameters must be chosen before an FLC can be constructed. The most cumber- some tasks in designing these parameters lay in the des- ignation of proper membership functions and the formulati'on of a comprehensive and reasonable rule base. Therefore, how much and how effectively one can lessen the difficulties in building the membership func- tions and the rule base becomes a main concern in the whole FL,C design procedure.
In this Section, we propose a systematic design method fix the FLC. This organised method not only simplifies the sequences in constructing an FLC but also makes the FLC more flexible in practical applica- tions.
First, we make a few modifications on the rule-base representation and then introduce the shrinking-span membership functions, and finally derive the simply input-output relation of the FLC.
3.
I
Sirnple rule baseWith the purpose of making the FLC expression less complex, we use a numerical sequence to map the ele- ments in the term-set of the linguistic variable x. For an I-input single-output FLC, the term-set for input variable xi is denoted by
Design of FLC with shrinking-span
Tz, =
{
. . .
,
A(%,-l) > A(i,O), A(i,l),. .
',
A(i,mz)1
-
-
{
A(Z,l%) 11; E 17%}
(10) here Im, = {-mi,
...,
-1, 0, 1,...,
mi} is the index set withM , ( M , = 2mi
+
1) terms for linguistic variablexi.
That is, the un:iverse of discourse UX, of linguistic variablexi
is partitioned into M , sections and each section is isso- ciated with a linguistic term and is characterised by the fuzzy set A(i,lt). Similarly, the output variable y for the FLC has the term-set as follows:
T y = {B-mzq,.
.
. ,B-1, B o , B I , .. ' ,
Bmy} 1 { B I I ~ E Im,}(11) my, Imy, I and M y are analogous to mi, Zm,,
li
andMi,
respectively. In this way, the rule base for the I-input single-output FLC can be expressed by
R(11, . . .
,11;
1) :IF X I is A(l,Ll) AND. . .
AND 21 is A(I,l,) THEN 1~ isBl
V1% E
In,,
1 E Im,(12)
This representation method of rule base is called the index-represented rule mapping [6]. We call it index representation in the following text to distinguish it from the sequence representation depicted in eqn. 1. Assume that the complete and simple rule mapping properties [6] hold for the remaining parts of this research, that is
I
l=E12
(13)i=l
From the previous relation, it can be shown that for a simple rule mapping my is the summation of all mis,
that is m, = C f = l mi, and the number of linguistic val- ues for output y , My , in an Z-input single-output FLC is determined by M y = 2m,
+
1 = 2 C!=, mi+
1 and the total number of rules in the rule base is J =nfZl
M i
( M i = 2m,
+
1).To take advantage of both the index representation and sequence representation, the following relations are proposed as transformations between the indices lis of the index representation and the index j of the sequence representation:
j
= h(l1,. . .,
I I ) = ( I 1 + m 1 ) x M.2 x M.3 x I.. x MI+
(l.2+
ma) x M3 x.
. .
x M I+
(11-1+
m I - 1 ) x MI+
( I 1+
r n I )+
1+
* . . (14)n
ILfk k = z + l f o r i = 1 N I (15) Of course, other forms of h andh
are acceptable as long as they are adequate to perform accurate mapping between these two types of representations. From the relations proposed, it is obvious that whenever a set of lis is chosen a corresponding j is determined, and viceversa.
Table 1 illustrates both the index representation and sequence representation of a simple rule mapping. Table 1: Simple rule mapping for I 2 and m, = m2 = 2
1, 1, I - 2 - 1 0 1 2 j - 2 1 0 1 2 I* -2 -4 -3 -2 -1 0 /2 -2 1 2 3 4 5 -1 -3 -2 -1 0 1 - 1 6 7 8 9 10 0 - 2 - 1 0 1 2 0 11 12 13 14 15 1 - 1 0 1 2 3 1 16 17 18 19 20 2 0 1 2 3 4 2 21 22 23 24 25
( a ) Index representation ( 6 ) Sequence representation
3.2 Sh rin king-spa n m em be rsh ip functions
In the real applications of FLC, the membership func- tions are constructed by assembling knowledge of the
360
domain experts and then modified by laboriously sur- veying the control response of the process. In most control cases, the FLC cannot be effective without carefully arranging the membership functions.
In the theoretical analysis of the FLC, however, the selection of membership functions does not get much attention by the majority of researchers. Most choose isosceles triangular functions with equal spans through- out the whole universe of discourse as membership functions for their FLCs [2, 6, 8, 91. The main advan- tage of choosing this type of membership function is that equal-span isosceles triangular membership func- tions ease the difficulties in analysing the structure of the FLC. However, almost all the applications of FLC adopt nonequal-span membership functions to cope with the real control problems. Instinctively, the closer the control response to the set point (or normal condi- tion), the narrower the membership function range should be. For some highly nonlinear processes, such as inverted pendulum system, an FLC with equal span triangular membership function is not adequate to achieve a good control result.
To accomplish a better performance and to devise a more rational FLC, the shrinking-span membership functions is propounded to fulfill these aims. As an illustrative study, the following assumptions are made:
[All Trapezoidal family membership functions are pre- supposed here as a fundamental work. This implies that all membership functions are normal. Other types of membership functions, such as gaussian family membership functions, can be applied directly.
[A21 The universes of discourse for all linguistic varia- bles xis and y are confined to the range [-1, 11. Such a restriction can be easily satisfied by multiplying a scal- ing factor to the original values of these linguistic vari- ables.
Conceptually, the SSMFs are a series of orderly arranged membership functions for a linguistic variable across its universe of discourse. By using a series of
A(x,)s, we propose the following representation for the trapezoidal family SSMFs A ~ ( ~ , z J ( x ~ ) for linguistic varia- ble xi: A & ) =
,~
(z: 2 21
) AT2. i, - 1 1-
(1 - /3 A;. ,1; ) [ l - ~ ) A ~ ~ , , ~ ~ - ( l - / 3 ) A ; ~ , ~ ~ + l ~ J ( ? > l % ) > for I , E Im, (16) here A$,I,) is the principal value of A(i,l,)(xi) defined bywhere si E [0, I ] is the shrinking factor for linguistic
variable
x,.
To comply with this representation, letA*(i,-m,-l) = A*(i,-m,) and A*(i,m,+l)=A*(i,mi); Ap(i,-ml)(A*(i,-mi)) = 1 and AP(i,m,)(A*(i,m,)) = 1. By applying various shrink- ing factors to the same linguistic variable, different membership functions can be obtained to examine which is the most suitable for a specific application process.
p
is the overlapping factor whose reasonable range is [0, 11.p
can take values greater than unity as long as the resultant membership functions are rational in applications. The overlapping region increases monotonically asp
increases. Forp
= 0 it is clear that there is no overlap between the SSMFs and if /3 = I the supports for the SSMFs have proper overlapping regions.A typical SSMF is shown in Fig. 2 (the notations have been simplified to make them easier to be compre- hended).
Fig.2 Typicul trupc'zoiduljumily SSMFJ tn = 4; s = 0.7; p = I
Note that when shrinking factor s, = 1, the SSMFs A(i,/J(x& degrade to ordinary equal-span membership functions. Therefore the conventional equal-span mem- bership functions are a special case of the SSMFs.
The specifications of the SSMFs described above have the advantage of reducing the design parameters of an FLC. With the definitions of SSMFs, the number of linguistic values m, and the shrinking factor si are the only required parameters for setting up the mem- bership functions of a linguistic variable. This not only dramatically lessens the efforts in obtaining the mem- bership functions but aso provides a more reasonable interpretation of these membership functions.
3.3
Design ofFLC
withSSMFs
In this Section, we construct an FLC based on the con- ception of simple rule mapping and SSMFs. We name this type of fuzzy controller a fuzzy controller with shrinking-span membership functions (SSMFs-FLC for short). Further, we make some simplification of SSMFs-FLC by choosing proper operators to make the SSMFs-FLC more practical.
Basically, an SSMFs-FLC is an FLC having input/ output relation described in eqn. 9 except that the rule base adopts the simple rule mapping principle and the membership functions of the input variables xis and output variable y are restricted to SSMFs.
To make the structure more easily understood, the following assumptions are observed. First, all input lin- guistic variables are assumed to have the same number of linguistic values, that is m , = m2 =
...
= mI = m.With the simple rule mapping my = E[=, m i = Im holds and thererore the number of linguistic values for output is M y = 2my
+
1 = 21m+
1. Furthermore, the trapezoi- dal family membership functions having the form of eqn. 16 are chosen for both the input and output lin- guistic variables withp
= 1. Other values forp
are acceptable provided that the membership functions are reasonable for applications.Explicitly, the membership functions of input linguis- tic variable
xi
can be expressed as (let A?i,-m-l) = A &m,)and A?ii,nzi+1) = AIi,mi); Aji,-m,)(A*(,-nzi)) = 1 and
A(~,M~,)(AT~,,ZJ) = 1 in the following equations)
As for the output linguistic variable y , similar represen- tations cam be obtained:
Bl(y) = A(y;
B7-1,
BT,BT+i)
(19),
1 E Im7,=
{ 0 , + 1 , ..
. , & I m } (20) here, B,* is principal value defined byB,* - . p u - i L l 1
my
The following three properties can be derived for the SSMFs with
p
= 1.Property I : Given numerical value
xi*
E ; lA?z,l,), At,l,+k)l c Uxi for linguistic variablexi,
there exists only two nonzero membership values in the SSMFs, that is1, E 1, - { m >
Proof: Straightfoward results from the definition of SSMFs.
It is not necessary to calculate the membership values for all SSMFs owing to this property. This greatly reduces the computational effort in implementing SSMFs in industrial processes.
Property 2: The two nonzero membership values in the SSMFs of property 1 have a sum of 1 and hence the summation of all membership values for x, is also 1. That is
A(%,l&3 = 1 vx; E
uz7
l , t I m
Pro05 Straightforward results from the definition of SSMFs.
The following property states that the centroid of a single membership function (local centroid) for output linguistic variable with the form of eqn. 19 can be com- puted by using the principal values only.
Property 3: For the SSMFs Bl(y)s defined in eqn. 19, let cls be the centroids of membership functions Bl(y)s,
then
1
cl = ?(B,*_,
+
B;+
B T + ~ ) forI
E I-, (21)Proof: In computing the centroid value for membership function Bl(y), the widely used centre of area (COA) method is adopted here to generates the result. In the case of a continuous universe of discourse, this method gives
3
First, for 1 E Imj - {-my, m y } let B, = h(y;B,_,,B;,B&),
and the numerator of eqn. 22 is referred to as the moment and the denominator is called the area of the membership function for convenience. Then the moment M l of the membership function Bl is
Therefore the centroid of membership function BI is
As for
I
t { m y , m y } , the same result can be obtained by restricting the integration range within the universe of discourse. This completes the proof.The following theorem states that the final crisp out- put of the SSMFs-FLC can be computed from the local centroids with a discrete method. This result less- ens computation and favour digital implementation. Theorem 1; For a SSMFs-FLC with its membership functions described in eqns. 18 and 19, suppose the algebraic product is chosen as operator F and I, sum- mation (C) is chosen as operator A, and COA is used for defuzzification. Given the crisp input values sl.'s. then the final crisp output y* can be computed from local centroids:
m ,,
l=-m,
here cl and SI are the centroid and area of the Zth inem- bership function of output linguistic variable J . @/ is the summation of the firing levels of all rules whose consequent fuzzy sets equal the Zth fuzzy set of J', that
is
'I
@ l =4.7
=jn
&.&;I
V l t €ITraz V I , € I ? , 2 9 1=1 L . 1 I , + + r r = 1 3 t l l i - + I 1 = l & , = / , , ( l , + . + I r ) & , = h ( l l + . . + I I ) (24) where A(i,/,)(x,*)s are the membership values of inputsX I s.
Proofi According to the inference procedures proposed for SSMFs-FLC, we first use the sequence representa- tion of the rule base to show that the crisp output of the system described in theorem 1 can be obtained from local centroids and firing levels, and then perform a transformation to the index representation to get the final results.
Starting from the primitive eqn. 9 and applying the proper operators, we get
*
( 2 3 )
here, is the firing level of the j t h rule and equals r I L , A ( l J ) ( x J . Let S, and cj be the respective area and centroid of the Ith rule's consequent set B,:
s,
= / B M d Yc'
7,s
YB,(Y)dYs
YB,(?J)d?J ( 2 6 ) substituting from eqn. 26. Hence.i'
YB,
(?J)dY = c3s3 ( 2 7 )1 71
Substituting eqns. 26 and 27 into eqn. 25, we derive
J
c
c.7s,
4.7
( 2 8 ) j=1 ?Jx =5
s34j j=1As noted previously, the sequence representation of rule base can be mapped to index representation, eqns. 14 and 13 serving the purpose of transformation between these two representations. From the relations given there may be several j s mapping to the same
I,
that is there are several rules having the identical con- sequent set. Substituting 1 f o r j in eqn. 28 and sum the firing levels of the same consequent set into a single term, we get the final form for the centroid:m , l=-m, C l S L Q I
c
Sl@l y x ?nu l=--m,iwhere is the summation of the firing levels of all rules whose consequent fuzzy sets equals the lth fuzzy set of y : as defined in eqn. 24.
In summary, the SSMFs-FLC is more rational than the FLC in both theory and implementation. Due to the features of fuzzy sets, SSMFs-FLC can deal with the indistinctness of some processes that we cannot describe with real precision. Moreover, the SSMFs pro- vide SSMFs-FLC another equipment to handle the obstacles in constructing membership functions for an FLC. By only setting m and s, a series of membership functions with reasonable physical meaning are attained for complicated processes. Further, with proper parameters of SSMFs the calculation of the controller is lessened dramatically. All these make the SSMFs-FLC a promising implementation over the con- ventional FLC.
In the following Section we apply the SSMFs-FLC to some representative processes to demonstrate its utility. 4 Simplified SSMFs-FLC and its performance In this Section, some numerical simulations are used to examine both the effects of the design parameters and the ability of SSMFs-FLC. First, the effects of shrink- ing factor are illustrated by observing the changes occurred in the control surfaces when different shrink- ing factors are applied to the two-input one-output sys- tem. Next, some typical processes are used to examine the control ability of SSMFs-FLC on linear systems which have same designing parameters (m and s) of
IEE Prm-Conlrol Theory Appl., Vol. 143, No. 4. July 1596
SSMFs-FLC. Finally, the SSMFs-FLC is applied to a pendulum-car system to demonstrate both the effects of shrinking factors on control performances and the robustness of the SSMFs-FLC on different initial con- ditions.
4.
I
SimplifiedSSMFs-FLC
Although the SSMFs-FLC is designed as a multi-input one-output FLC, the two-input one-output system is adopted here as an example. We refer this type of SSMFs-FLC as a simplified SSMFs-FLC.
For an ordinary feedback control scheme, the inputs of the SSMFs-FLC used in this Section are error e and change in error Y of the process, the output linguistic
variable is the change in controller output U. The asso-
ciative universe of discourse and term-sets of these lin- guistic variables are U, and Te, U, and T,, and U, and
Tu for e, Y and U , respectively.
In this study, simple rule mapping is applied to con- struct the rule base and the inference procedures described in eqn. 9 are used to calculate the result for the following cases. Some assumptions are made beforehand: U,, U,. and U, are all set to [-1, 11; the term-sets T, and T,. have the same number of elements, that is m, = m,. = m and therefore m, = m, f m, = 2m.
The subscripts i, j and k(= i
+
,j) are associated with e, Yand U, respectively, as indices. The typical two-input one-output SSMFs-FLC feedback control system and its detailed computational steps are depicted in Figs. 3 and 4.
process con tro I ler
,
Fig 3 Typical SSMFs-FLC feedback control system
The notations therein are defined as follows:
Fig.4 Detail of fuzzy
here, T is the sampling interval; sp(t) is the set point, CO(t) is the controller output and y ( t ) is the process output; e,,(n), r,(n) and u,(n) are error, rate of change in error and change in controller output, respectively, at the nth sampling point. GE, GR and GU are scalers for e,(n), v,(n), and u,(n), respectively, and the scaled crisp value e*, Y* and U* have a numerical range in [I, -11. -Inle, I,, and -Imu are the index sets for the term- sets
of
liriguistic variable e, r and U , respectively; E,(e*)and R,(Y") are the membership grade for e and r, respectively; U,(U) are membership functions for U.
Operators M, F, I, A and D are defined in eqns. 2, 4, 5 ,
6 and 7, respectively.
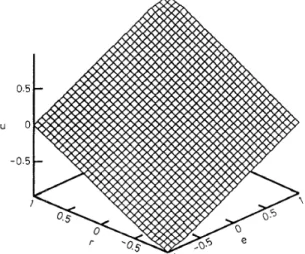
4.2 Control surface of simplified SSMFs-FLC The effects of shrinking factors on FLC can be exam- ined by comparing the control surface of different sets of shrinking factors. Here we present four control sur- faces (Figs. 5-8) with various values of shrinking fac- tor. In the implementation the algebraic product is chosen as; operators F and I, summation (E;) is picked as operator A, COA is used for defuzzification opera- tor D. One can find that the control surfaces are quite different for distinct values of shrinking factors. There- fore by modifying shrinking factors the human opera- tor can acquire numerous control surfaces and then pick up the one that is most suitable.
0
U
-0
Fig.5
1.0 Typical control surfaces ofsimplEfied SSMFs-FLC
.se = s,. = su =
From Figs. 5-8 one can find that the control surface of the SSMFs-FLC with equal-span membership func- tions (se == s, = s, = 1) is a linear one, and thus is obvi- ously not adequate to control the nonlinear processes. On the other hand, an FLC with nonlinear control
defuzzif I'cation O U t D U t
-
Id,
I I L _I controller in Fig. 34.3
Control response ofSSMFs-FLC on
linear processesFive linear processes are used t o explore the feasible nominal performance of the SSMFs-FLC:
(i) TY: typical first-order with dead-time process
e - o . 2 s G p ( s ) = ~ s i 1 e - 4 s G p ( s ) = ~ s + l e-' 0.5
U 0 (ii) LD: first-order with large dead-time process
-0.5
(iii) UD: underdamped process
I
G p ( s ) = 9s2
+
2.4s+
1 (iv) HO: high-order process.\ e-3s
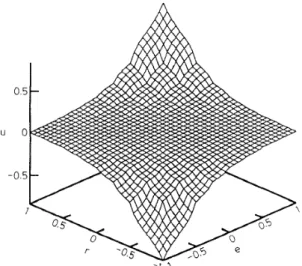
Fig.6 Tvpicul control sz4rfiice.s ojsimplified SSME\--FLC .se = s, = 0.6;
s,, = 1.0 G p ( S ) = ( s
+
1)2(s2+
1)(v) IR: inverse response process (-s
+
l)e-'G p ( s ) =
(2s
+
l ) ( s+
1)Fig.7
s, = 0.6 Typicd coritrol surfaces of siniplified SSMFs-FLC s, = s,- = 1.0;
0 ' r - J -\ Fig. 8 0.6
Typical control surfhces of siniplified SSMEs-FLC s, = s, = s, =
surface may not be a good one to handle the linear processes. For that reason, the characteristics of the control surface can be modified by only the shrinking factors is clearly a merit of the SSMFs-FLC.
The same number of linguistic members and shrinlc- ing factors are assigned to all the five cases to show the generality of the SSMFs-FLC. The only tuning param- eters are input/output scalers (GE, GR, GU) which are tuned by the rules-of-thumb. Two principles must be observed in tuning the parameters:
( a ) GE and GR must appropriately transfer the sensor data, error and change in error, into the specific uni- verse of discourse, say [-1, I].
(6) The control action should not go beyond the physi- cal capability of the controller, that is, GU is confined to a certain range.
The number of linguistic members is set to nine for both error and rate of change in error, that is m, = m,
= 4, thus the number of linguistic members for change in controller output is therefore 17 (mu = me
+
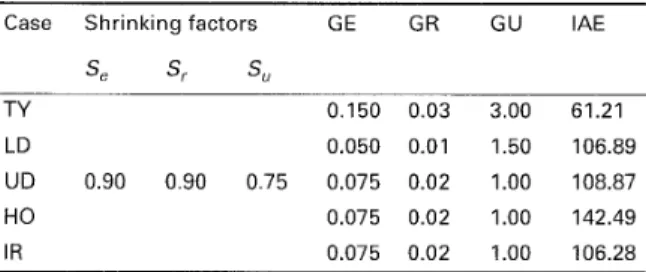
m,).Table 2 shows the design parameters (me, m,, se, sr,
sJ: tuning parameters (GE, GR, GU) used and result- ing IAE of the five demonstrated cases for 10% set point response. Fig. 9 shows the set-point responses, i.e. set point is changed from 50 to 600/0.
6 g. #
:'e,
"1 55 50 50 a bs.
-
& 55 50 0 20 40 60 80 100 C d z. S 660 5 ~ ~ ~ ~ "x 55 50 0 20 40 60 80 to0 e Fig. 9a Typical first-order process
h Large dead lime process
c Underdamped process
d High-order process
e Inverse response process
Responses of demonstrated cases
Note that the shrinking factors are arbitrarily selected in these examples. Since optimisation is not involved in the procedures for obtaining the values of GE, GR, GU, the performances should be viewed with an eye to their rationality rather than their superiority. Table 2: Design and tuning parameters of demonstrated cases
Case Shrinkingfactors GE GR GU IAE
se
s,
s,
TY 0.150 0.03 3.00 61.21 LD 0.050 0.01 1.50 106.89 U D 0.90 0.90 0.75 0.075 0.02 1.00 108.87 HO 0.075 0.02 1.00 142.49 IR 0.075 0.02 1.00 106.28 4.4 Control response of SSMFs-FLC on nonlinear processFrom the control surface of the SSMFs-FLC, one can find that the SSMFs-FLC possesses a nonlinear feature in its control structure. To exhibit its control ability for nonlinear processes, the SSMFs-FLC is applied to a pendulum--car system to achieve this aim.
a car moving along a line on two rails of limited length
a pendulum hinged in the car by means of ball bear- ings rotating freely in the plane containing this line
a car driving device containing a D C motor, a D C amplifier, and a pulley-belt transmission system
Such a system is characterised by a n unstable equilib- rium point in the upright position of the pendulum, a stable equilibrium point in pendant position, as well as two uncontrollable points when the pendulum is hori- zontal. The dynamic behaviour of the pendulum-car system can be derived [ 15, 161 and expressed as
[ ( . M c + i ~ p ) , y t a n Q + $ i ~ ~ ~ s i n O . Q ' ~ ] + U
,'
/ =
where the M/, and I are the mass and length of the pen- dulum, respectively, M c is the mass of the car, 8 is the angle measured from the pendant position, and U is the
driving force applied to the car.
The parameters of the model are taken as follows [ 161:
Ad,-
= 2.81ig; M p = 0.2kg; L = 0.75rn; g = 9.81m/s2 The control objective is to stabilise the pendulum in upright (1 80") position from an initial deflect position (say 170") by changing the driving force U . Due to thecharacteristics of the pendulum-car system, the control scheme is slightly modified so that the output linguistic variable is the controller output, rather than the change in controller output. It means that the controller out- put CO(t) no longer equals CO(t - 1)
+
um(n) butequals u,(n) directly.
The main aim of the simulation is t o demonstrate the effects of both the shrinking factors and robustness of the SSMFs-FLC for nonlinear systems.
The pendulum-car system [I 5, 161 consists of:
(29) -$(ALLc
+
Mr))LsecQ+
;lWpLcose4.4.
I
Effects of shrinking factors: The effects of shrinking factors on control performance are demon-strated by applying different combinations of s,, s,, s,, to the SSMFs-FLC with constant parameters (m = 4, GE = 0.5, GR = 0.01, G U = 300), the initial position of the pendulum is 170", the initial control value is 0, and the sampling interval in this simulation is set to 10ms. T o make the differences between the responses clearer, J,, and J, are set to 0.9, 0.6 and 0.3; s, is changed from 1.0 to 0.7 to 0.4. Fig. 10 shows the responses of the nine combinations of shrinking fac- tors. One can see that the responses differ markedly between these simulations. Some trends can be observed from the responses: for the pendulum-car sys- tem: the less are s, and sr, the less the overshoot and oscillation; the less is ru, the slower the response. This is due to the fact that modifying the shrinking factors not only alters the layout of the membership functions of the linguistic variables but also changes the rules fired for the identical inputs. Certainly, the trends men- tioned may not occur for other noillinear systems, how- ever, the effects of shrinking factors are already elucidated by this example.
185ti a t b
t
c
1 7 0 r -I
V
2qp
mp,
i
,
175 170-
0 5 1 0 0 5 1 0 0 5 10 t t t Fig. 10(e(0) = 170") Rrsponse of
e(()
ming dqferenl ,rhrinking,Jaclors( U ) ~S<, = s r = 0 9; s, = 1.0 (b) Is.. L= 5.. , = 0 6: s,. = 1.0 (e) s, = s,. = 0.3; s,, = 1.0 (e) s,, = s,. = 0.6: s,, = 0.7 (d) s,. = ,SF = 0 9; .S8, = 0.7 I , U, s, = si- = 0.3; s, = 0.7 ( h ) .s<, = A~ = 0.6: = 0.4 (i) s , = s, = 0.3; s, = 0.4 (g) .r, = .si = 0 9, s, = 0.4
4.4.2 Robustness of SSMFs-FLC: The robustness
of SSMFs-FLC is showed by changing the initial posi- tion of the pendulum. In this example, the shrinking factors of the SSMFs-FLC are s, = s,. = 0.3 and s, = 1.0, the other parameters are the same as those in Fig. 10. These values are originally used to control the pen- dulum wilh the initial position of 170", however, the same values are applied to control the other three pen- dulums with initial position of 150, 130, and 1 lo", respectively, to examine the robustness of the SSMFs- FLC. The simulation results are plotted in Fig. 11. All the four pendulums reach the set point with little oscil- lation and then maintain their positions at 180" perfectly.
365 IEE P r w -Cuntrol 7'heovy Appl., Vu/. 143. Nu. 4, July 1996
r 1301 b 0 5 10 t d 1 1 0 1 0 5 10 t C Fig. 1 1 s F = sR = 0.3; so = 1.0 a e(0) = 110” h e(0) = 130” c e(0) = 150” d O(0) = 170”
Rexpome of Ojt) starting with dflerent initialpositions
From these empirical studies, the desired control actions of the SSMFs-FLC can be obtained readily by carefully choosing the appropriate shrinking factors. Moreover, the SSMFs-FLC has shown its ability as an efficient and yet robust control scheme for either linear and nonlinear processes.
5 Conclusion
We have proposed a new scheme, shrinking-span mem- bership functions, to specify the membership functions for a fuzzy logic controller. With only two parameters (shrinking factor and number of linguistic variables), this method provides an easy and systematic way in designating membership functions and the membership functions generated are more reasonable to the human perception than those with equal spans. When lacking thorough knowledge of the process, the human opera- tor can use both SSMFs and simple rule mapping to construct a primitive FLC which can be used as a fun- damental structure for further fine tuning.
According to the simulation results, the SSMFs-FLC
shows its control ability in either linear and nonlinear systems. Satisfactory responses can be acquired without laborious optimisation calculation. Further, the SSMFs-FLC also exhibits its robustness in controlling the highly nonlinear pendulum-car system with very different initial conditions. All these features demon- strate that the SSMFs-FLC possesses the capability to adapt itself to different system deviations easily.
Since it reduces both the domain knowledge of the process and the load of computation in devising an FLC, the SSMFs-FLC narrows the gap between a the- oretical FLC and a practical one, and thus helps the FLC more realistic. 6 1 2 3 4 5 6 7 8 9 References
ZADEH, L.A.: ‘Fuzzy sets’, Inform. Control, 8, pp. 338-353
MAMDANI, E.H.: ‘Applications of fuzzy algorithms for simple dynamic plant’, IEE Proc., 1974, 121, pp. 1585-1588
MAMDANI. E.H.. and ASSILIAN. S.: ‘An exoeriment in lin- guistic synthesis with a fuzzy logic controller’, Zni. J. Man-Mach.
Stud., 1975, 7 , pp. 1-13
LEE. C.C.: ‘Fuzzy logic in control systems: Fuzzy logic control- ler. Part I. 11’. IEEE Trans.. 1990. SMC-20 . DD. 404435 RAJU, G:, and ZHOU, J.:’ ‘Adaptive hierarchfcal fuzzy control- ler’, IEEE Trans., 1993, SMC-23, pp. 973-980
WONG, C., CHOU, C., and MON, D.: ‘Studies on the output of fuzzy controller with multiple inputs’, Fuzzy Sets Syst., 1993, 57, pp. 149-158
TANG, K., and MULHOLLAND, R.: ‘Comparing fuzzy logic with classical controller design’, IEEE Trans., 1987, SMC-17,
OD. 1085-1087
SILER, W., and YING, H.: ‘Fuzzy control theory: The linear case’, Fuzzy Sets Syst., 1989, 33, pp. 275-290
YING, H., SILER. W.. and BUCKLEY. J.J.: ‘Fuzzv control the- om: A nonlinear case’. ’Automatica. 1990: 26. m. 513-520 10 CHEN, C.-L., and CHEN, W.-C.l ‘Fuzzy ;ohroller design by
using neural network techniques’, ZEEE Fuzzy Syst., 1994, 2, pp. 235-244
1 1 DRIANKOV, D., HELLENDOOM, H., and REINFRANK, M: ‘An introduction to fuzzy control’ (Springer-Verlag, Berlin, 1993) 12 YAGER, R.R., and FILEV, D.P., ‘Essentials of fuzzy modeling
and control’ (Wiley, New York, 1994)
13 HELLENDOORN, H.: ‘Closure properties of the compositional rule of inference’, Fuzzy Sets Syst., 1990, 35, pp. 163-183 14 MIZUMOTO, M.: ‘Pictorial representations of fuzzy connectives,
Part I: cases of t-norms, t-conorms and averaging operators’, Fuzzy Sets Syst., 1989, 31, pp. 217-242
15 CZOGALA, E., MROZEK, A., and PAWLAK, 2.: ‘The idea of a rough fuzzy controller and its application to the stabilisation of a pendulum-car system’, Fuzzy Sets Syst., 1995, 72, pp. 61-73 16 LIN, E.C., and SHEU, Y.-R.: ‘A hybrid-control approach for
pendulum-car control’, ZEEE Trans., 1992, IE-39, pp. 208-214