IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 38, NO. 4, APRIL 1990 489
Least-Squares Regenerative Hybrid Array for
Adaptive Beamforming
Abstmct- The regenerative hybrid adaptive antenna array has recently been proposed for data communications. It utilizes both the steering vector and reference signal, which is acquired from the array output through a detection-generation procedure, to preserve the desired sig- nal while suppressing the interference. The regenerative hybrid adaptive array is much less sensitive to errors in the steering vector than the Applebum-type array. The application of the least-squares method to the regenerative hybrid array to achieve fast convergence is investigated. Recursive algorithms such as the QR decomposition can be used to update the weights for computational efficiency. It is shown that the least-squares regenerative hybrid array converges to the steady state of the original regenerative hybrid array which is based on the gradient search algorithm. The array transient behavior and steady state perfor- mance are simulated by computer.
I. INTRODUCTION
ADAPTIVE BEAMFORMING, one can avoid the sup- a reference signal [l], [2]. Ideally, both these methods can achieve the maximum output signal-to-interference-plus-noise ratio (SINR). The Applebaum-type array, however, is very sensitive to errors in the steering vector, especially in the presence of a desired signal [3], [4]. As to the reference sig- nal, it can be acquired only for limited types of signals, for example, the spread spectrum signal [5]. For point-to-point spread spectrum communications, the idea of a hybrid adap- tive array has been described which utilizes both the steering vector and reference signal [6], [7]. It has been shown that the hybrid adaptive array is much less sensitive to errors of the steering vector than the Applebaum-type array and does not exhibit the weight cycling phenomenon reported in [8] for an imperfect reference signal.
Recently, a regenerative hybrid array has been proposed for data communications without using the spread spectrum technique [9], [lo]. It consists of an Applebaum-type array and a regenerative reference loop in which the reference sig- nal is generated through a detection-generation process. In
r"
pression of the desired signal by using a steering vector orManuscript received September 1, 1988; revised February 10, 1989. This C. C. Yeh is with the Department of Electrical Engineering, National W. D. Wang is with the Navy Electronics and Communication School, T. H. Chao is with the Communication Engineering Department, National J. Mar is with the Chung-Shang Institute of Science and Technology, Tai- IEEE Log Number 9034317.
work was supported in part by Grant CS 76-0210-D002-19. Taiwan University, Taipei, Taiwan, Republic of China. Republic of China.
Chiao-Tung University, Hsinchu, Taiwan, Republic of China. wan, Republic of China.
adaption, the regenerative reference loop is first open and the array behaves like an Applebaum-type array. After weights converge, the loop is closed. The reference signal generated by the loop is highly correlated with the desired signal because of the detection-generation process. Therefore, it can be used to eliminate the desired signal component of the feedback. It has been shown that the weight vector of the regenerative hybrid array converges to that of the Applebaum-type array adapted without the desired signal present. Therefore, sensi- tivity to errors of the steering vector is reduced significantly. The regenerative hybrid array described in [9], [lo] is based on the gradient search algorithm, which converges slowly. In this paper, we investigate the utilization of the least-squares method [11]-I131 to adapt the regenerative hybrid array to achieve more rapid convergence. Recursive algorithms such as the QR decomposition can be used to update the weights. We analyze the least-squares solution of the weight vector and show that it converges to the steady state weight vector of the original regenerative hybrid array. Computer simula- tions are performed to simulate the array transient behavior and to compare its steady state performance with those of the Applebaum-type array and high-order derivative constraint ar- rays [14], [15].
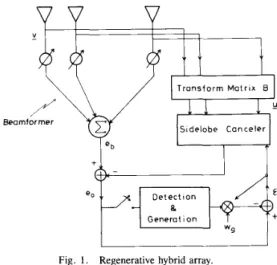
II. LEAST-SQUARES REGENERATIVE HYBRID ARRAY Let us consider the N element regenerative hybrid array shown in Fig. 1. It consists of a general sidelobe canceler (GSC) structure Applebaum-type array [16], [17] and a re- generative reference loop. The desired signal is assumed to be data modulated and its phase vector at the array is denoted by s d . The imperfect steering vector used for beamforming is s*. Initially the regenerative reference loop is open and the array behaves like an Applebaum-type array. Although the steering vector is imperfect, the interference in general will be suppressed by the Applebaum-type array as it reaches the steady state. The steering vector is assumed to be accu- rate enough so that the Applebaum-type array can generate
a steady state output SINR of a few decibels. The reference loop is closed after the Applebaum array converges. This loop acquires the reference signal from the array output through a detection-generation procedure with the assumption of a per- fect synchronization. The reference signal is intended to elim- inate the desired signal component of the feedback so that the
weight vector of the sidelobe canceler is adapted as if there were no desired signal present. Therefore, sensitivity to errors of the steering vector is significantly reduced. In the follow- 0018-926X/90/0400-0489$01.00 @ 1990 IEEE
v v
Iv
V Transform Matrix BA
Sldelobe Canceler/
Beamformer ebT
Fig. 1 . Regenerative hybrid array.
where A , ( k ) is the matrix consisting of the input vectors, AlJ(k) = [u(l), u ( 2 ) , . . . , v ( k ) l . (9) In (8) the term in brackets is the equivalent weight vector of
the array, which is denoted by w,(k),
w,(k) = s* - B T W , ( k ) . (10)
From (8) and the fact that s spans the null space of B , the
equivalent weight vector can be written in the form
W" ( k ) P 1 (k)[A:(k)A;(k)l --Is*. (11)
In (1 l), the constant straint
( k ) can be determined from the con-
which results in
(13)
N
ing, we investigate the application of the least-squares method to achieve fast convergence.
We first describe briefly the least-squares solution of the Applebaum-type array, i.e., the regenerative reference loop is open. From Fig. 1, the output of the beamformer at time k
sT [ A
;
(k)A; (k)] - 1 s*to adapt the weights of the regenerative hybrid array in order Pl(k) =
With the assumption that the array input processes are ergodic and k is large, we have
k
is A ; ( k ) A ; ( k ) = C U * ( i ) U T ( i )
i = l
eb(k) = u T ( k ) s * (1)
where T and the asterisk denote transpose and conjugate, re-
spectively, and u ( k ) is the array input vector. The input vector
of the sidelobe canceler is
u(k) = B u ( k ) ( 2 )
where B is an (N - 1) x N transform matrix with the null space spanned by s. To find the least-squares solution of the weight vector of the sidelobe canceler w,(k), we can choose
the array output to be the error signal. That is, at each time
k , we minimize the error function
k
where
(3)
It is known that the solution of (3) is [ 111
where eb(k) is the desired response vector
e k R (14)
where R is the covariance matrix of u(i). Therefore, (11)
converges to the steady state of the gradient search based Applebaum-type array.
After the Applebaum-type array reaches the steady state, the regenerative reference loop is closed. This loop regen- erates a signal e,(k) from the array output through the
detection-generation procedure. eg ( k ) is multiplied by a
weight w g ( k ) to cancel the desired signal component of the
feedback. w g ( k ) as well as w,(k) are adapted by the least-
squares method. In adaption, the feedback can be chosen to be the error signal, and the error function to be minimized can be defined as
In (15), ~ f ( i ) is the feedback
kl is the instant just before the regenerative reference loop is
closed.
0
is a weighting factor between zero and unity,and A , ( k ) is the data matrix
o < p < 1
(17)= [u(l), u(2), ' .
.
,u(k)l. (7) which makes data received before kl less important. That Using (1) and (2), ( 5 ) can be written as choosing /3 properly could speed up the convergence rate isdiscussed in Section 111.
YEH et al.: LEAST-SQUARES REGENERATIVE HYBRID ARRAY 4 9 1 i
5 kl,
(15) can be written aski k
The least-squares solution of (18) is
It can be seen from (29) that if the regenerated signal e g ( k )
is scaled by a complex number, w,(k) remains the same. It can also be seen from Fig. 1 that if e g ( k ) and wg(k) are scaled by a complex number and the inverse of the number, respectively, w,,
(k)
remains unchanged.To obtain the equivalent weight vector,
w,(k),
we rewrite (28) by using (1) and (2)B*[A:(k)A:w
-~:(k)eg(k)e,T*(k)A:(k)/lleg(k)l121
. [s* - BTwu(k)] = 0 (30)
where
(31) e g ( k ) =
10,.
. .
,o,
eg(kl+
I ) ,. .
. ,eg(k)lT (21)Using (10) and the property that s spans the null space of B, we have from (30) that
and
below : In (32), p2(k) is a constant which can be determined from
N
In (24),
11
denotes the norm of a vector. From (24), w g ( k ) (33)III. CONVERGENCE PROPERTIES
In this section, the convergence properties of the least- squares regenerative hybrid array are investigated. Since the (25) interference has been suppressed as the regenerative refer- ence loop is closed, e g ( i ) can be assumed to be uncorre- lated with the interference. Furthermore, e g ( i ) is assumed to be uncorrelated with noises of the array elements. The term A,'(k)e,(k)eF*(k)A:(k) in (32) in first examined be-
low. Let a(i) denote the complex waveform of the desired signal. Ai,(k) can be written
can be expressed as
wg(k) = [e;* (k)eb(k) - e:* (k)A ~(k)w,(k)l/lleg(k)112.
Using (41, (20), and (22), w g ( k ) can be written in the form
e f * (k)eo(k>
wg(k) = (26)
lleg
( 4
II
where(27) where Sd is the phase vector of the desired signal, a @ ) = [ f i a ( l ) , . . . , f i a ( kI),a(kI
+
l ) , - . , a ( k ) l T To obtain w,(k), we substitute (25) into (24), which resultswhere We can conclude from (49) that the steady state equivalent weight vector of the least-squares regenerative hybrid array is
( k ) = [ 4 k l
+
11, a(k1+
2), ' ' ' ,CY(k)lT ( 3 8 )T'
and
The correlation coefficient between the regenerated signal and the desired signal can be defined as
Using (40), (37) becomes
A
:(k)e,(k)e:*(k)A:(k) z Ip(k)I2Ild(k)II2IIeg(k)II2s~~z.(41) With the assumption that the desired signal is uncorrelated with the interference and noises,
A
: ( k ) A : ( k ) can be approx-imated
N sTR; s w,(co) = ----iyR;lS*,
which is the same as that of the original regenerative hybrid array. Expression (50) is also the steady state weight vector of the Applebaum-type array adapted without the desired signal present. Therefore, sensitivity to errors of the steering vector is reduced significantly.
The array transient behavior depends on the value of
0.
It can be seen from (48) that in order to achieve fast conver- gence,0
should be a small number. In that case the error function given by ( 1 8 ) is dominated by the error signal with the regenerative reference loop closed. However, when0
is too small, the adaption of weights in the first several itera- tions after the loop is closed might be strongly affected by "snapshots" with large sampled noises. That could result in a temporary drop of the output SINR as shown by computer simulations presented in Section IV.IV. COMPUTER SIMULATIONS
A : ( k ) A T ( k )
=
Il&(k)(l2s:sz+ A i ( k ) A z ( k ) .
(42) (32) and using11
eg(k)l\ =Computer simulations were carried out to examine the tran- sient behavior of the least-squares regenerative hybrid array. Comparison between the steady state performance of the re- generative hybrid array and high-order derivative constraint arrays was made. In simulating the transient behavior, the
QR decomposition algorithm [11]-[13] is applied to update weights recursively. In each iteration, the algorithm computes matrix A ( k ) ,
Substituting (41) and (42)
lle,(~)Il,
we haveW"(k) = P2(k){rl/~(k)l12 -
l~(k)l21/~(~)ll21
. S ; S ~ + A ; ( k ) A z ( k ) } - ' s * . (43)
For ergodic array input processes, the following approxima- a unitary matrix Q ( k ) , which triangularizes the input data tions can be made when kl and k - k~ are large:
and where R ( k ) is a triangular matrix, and
A
,*(k)A :(k) 2 [okl+
( k - kl)]Rn. (46)In the above, Rd and R n are the desired signal component
and the interference-plus-noise component of the covariance matrix R , respectively. Substituting (4)-(46) into (431, we
have d(k) is denoted by
The multiplication of Q ( k ) and the desired response vector
w,(k) = p2(k){[0kl
+
( k - k l ) ( l - Idk)l2)1Rd+[0kl
+
( k - k l ) ] R n ) - ' s * . (47)In (47), p ( k ) is the correlation coefficient between the regen- erated signal and the desired signal defined by (40). Statisti- cally, lp(k)l is close to unity even for an error probability as large as 10-2-10-'. That lp(k)l converges to a value almost equal to one is discussed in detail in [9], [ l o ] . Therefore, as
k >> k l , we have [okl
+
( k -kl )(l - (p(k)/2)1Rd << [0k1+
( k - k ~ ) l R n , (48) and (47) becomes w,(k) ~2(k){[pk1+
( k - k l ) l ~ n ) - l s * . (49) Q ( k ) d ( k ) = (52)where d(k) equals e b ( k ) and e b ( k ) for k 5 kl and k
>
kl ,respectively. The optimal weight vector is obtained by solving
R ( k ) w ( k ) = P(k) (53) by a process of back substitution. In our simulations, when
k
>
kl , the error function to be minimized is defined by ( 18)in which the error signal power before kl is reduced by a factor of
0.
Therefore, during the (kl+
1)th iteration, R ( k l )and p(kl) are multiplied by a factor of
8,
and R(k1+
1) and p ( k l + 1) are computed by using f i R ( k 1 ) and @p(kl), respectively.YEH et al.: LEAST-SQUARES REGENERATIVE HYBRID ARRAY
-10
493
~ ~ " " " ' " ~ " " ' " " ' ' '
50
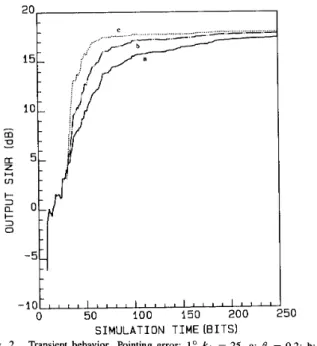
Fig. 2. Transient behavior. Pointing error: 1" k, = 25. a: p = 0.2; b:
p = 0.1; c : p = 0.04.
In the simulations, a seven-element linear array with ele- ment locations 0, 1 h, 2.5 A, 3.5 h, 6.5 h, 8.0 h and 8.5 A,
where h is the wavelength, are utilized. The desired signal is
a binary phase shift keying (BPSK) signal with an angle of arrival of 2" and power of 10 dB relative to the noise. Two Gaussian interferon are assumed present. Their angles of ar- rival are -2" and 7" with powers of 20 and 10 dB relative to noise, respectively. We first simulate the case where pointing error exists. With a preset steering direction of lo, the output SINR of the array before adaption and the Applebaum-type array are -5.13 and 2.12 dB, respectively. Fig. 2 is the sim- ulation with kl equal to 25, i.e., the regenerative reference
loop is closed at the end of the twenty-fifth iteration. Three curves are plotted with
0
equal to 0.2, 0.1, and 0.04, respec- tively. The plot begins at the eighth iteration because theQ R
decomposition algorithm is under initialization for the first seven iterations. At the end of the twenty-fifth iteration, the Applebaum-type array results in an output SINR of about 3 dB. Once the regenerative reference loop is closed, the array output SINR increases rapidly. For example, at the thirty-fifth iteration, the SINR is 6.0, 7.5, and 10.9 dB for
0
equal to 0.2, 0.1, and 0.04, respectively. All three curves converge toward the steady state of the Applebaum-type array adapted without the desired signal, for which the output SINR is 18.1 dB. The convergence speed increases with decreasing0
as predicted in Section 111.In above simulations, the reference signal is perfectly ac- quired in the detection-generation process. In order to see the effect of detection error on the transient behavior, we show in Fig. 3 simulations which contain detection error. With the same scenario except that kl equals 50, three curves are plot-
ted in Fig. 3 with
0
equal to 0.2, 0.1, and 0.02, respectively. The detection error occurs at the fifty-third bit for all threet
- 1 o d 100 150 200 0 50 SIMULATION TIME ( B I T S ) !50 Fig. 3. Transient behavior. Pointing error: 1" kl = 50. a: = 0.2; b:p = 0.1; c: p = 0.02.
curves. Simulation shows that the detection error causes a temporary drop of the output SINR for a
0
of 0.02. That is because for such a small0,
array weights are strongly effected by the "noisy" snapshot. Moreover, the detection error slows the convergence rate, which one can see by comparing Fig. 3 with Fig. 2. However, the convergence rate in this case is still much faster than that of the gradient search based regenerative hybrid array, which takes more than one thousand iterations to generate an output SINR greater than 15 dB [9].IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 38, NO. 4, APRIL 1990
Regenerative hybrid array
A pp IC liilu ni-t y pe a m y
1 st order derivative constraint array
I \ t + 2nd ordcr derivative Constraint array 20, Outpiit SINR (dB) Position error deviation 0.038 h Pointing error I " 18.12 18.08 2.17 -0.37 9.53 0.19 2.49 -8.45 -10 - 0 50 100 150 200 5 ~ SIMULATION T I M E [ B I T S ) !50 Fig. 4. Transient behavior. Pointing error: 0.5" k , = 50. a: (3 = 0.2; b:
p = 0.1; c : p = 0.02. TABLE I
ARRAY STEADY STATE PERFORMANCE
In simulating Fig. 3, the pointing error is 1" for which the Applebaum-type array has a steady state output SINR of 2.12 dB. Therefore, the noisy snap shot of the fifty-third iteration may have a strong impact on the adaption of weights. If the pointing error is reduced so that higher output SINR is ob- tained initially, that phenomenon can be eliminated. In Fig. 4 we show the simulation results with a presteering direction of 1.5", i.e., the pointing error is 0.5". With the pointing error, the Applebaum-type array has a steady state output SINR of 7.87 dB. Before we close the regenerative reference loop at the end of the fiftieth iteration, the output SINR is about 5.29 dB. Therefore, no detection error occurs in the fifty-third it- eration, and the convergence rate is similar to that of Fig. 2.
The steady state performance of the regenerative hybrid
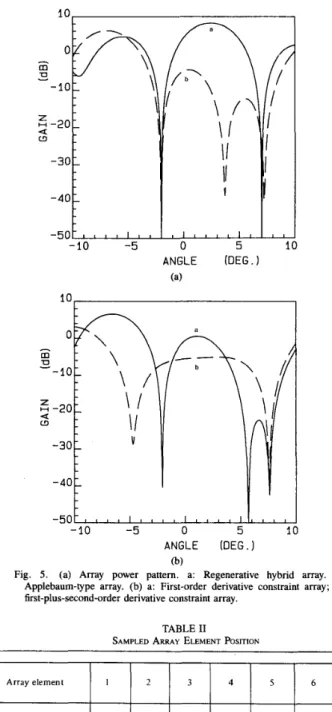
array is simulated to compare with those of the Applebaum- type array and high-order derivative constraint arrays. For a presteering direction of l o , the steady state output SINRs are 18.12, 2.12, 9.53, and -2.49 dB for the regenerative hybrid array, the Applebaum type array, the 1st order derivative con- straint array, and the first-plus-second-order derivative con- straint array, respectively, as shown in Table I. The steady state array power patterns are plotted in Fig. 5 with the weight
vector length normalized to one. Results show that the regen- erative hybrid array, the Applebaum-type array, and the first- order derivative constraint array have a good suppression of the interference. However, first-plus-second-order derivative constraint array fails, due to its broad beamwidth, to suppress the interferor with an angle of arrival of -2". Among the three arrays which suppress the interference, only the regen-
YEH et al.: Array element X axis ( h ) Y axis ( h ) LEAST-SQUARES I 2 3 4 5 6 I -0.04 1.02 2.47 3 . 5 2 6 . 5 0 7.94 8.52 0.02 0.02 0.01 0.07 -0.02 -0.01 -0.01 REGENERATIVE HYBRID ARRAY
10, 495 \I I' \ / \ I f ' I -50 -10 -5 0 5 10 ANGLE (BEG.) (a) 10 u --10 -5 0 5 1 0) ANGLE (DEG.)
Fig. 5. (a) Array power pattern. a: Regenerative hybrid array. b: Applebaum-type array. (b) a: First-order derivative constraint array; b: fit-plus-second-order derivative constraint array.
erative hybrid array can generate a high gain in direction of the desired signal.
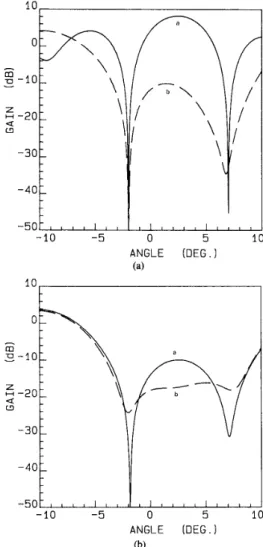
We have also simulated the transient behavior of the re- generative hybrid array with two-dimensional random element position errors. The probability density function of random er- rors in each dimension is assumed Gaussian with zero mean and standard deviation 0.038 A . The sampled array element locations are shown in Table 11. The desired signal and two in-
terferon remain the same, and the array is accurately pointed. The array transient responses with kl equal to 25 and 50 are plotted in Figs. 6 and 7, respectively. Similar to simulations of the pointing error case, no detection error occurs for
kl
= 25, and one in the fifty-third iteration for kl = 50. Steady state performances of the regenerative hybrid array and other ar- rays are shown in Table I. The regenerative hybrid array has an output SINR of 18.08 dB. However, the SINRs of the496
2
o
I
U 5 Z H cno/r
0 -5t l
I I 50 Fig. 6. Transient behavior. Position error deviation: 0.038 h kl = 25. a:= 0.2. b: p = 0.1. C: = 0.04 20 15- 10
-
m -a 5 --
-U - -z -c n -I- I- 3 -0 -H L?o:
- 1 o L I I I I I I t ( 1 1 " ' I " ' 1 1 " " I SIMULATION T I M E (BITS)Fig. 7. Transient behavior. Position error deviation: 0.038 h. a: p = 0.2; b: p = 0.1; C: p = 0.02.
other three arrays are all below 0 dB. Array power patterns are shown in Fig. 8. One can clearly see that the regenerative
hybrid array generates a high gain in direction of the desired signal, but the other arrays suppress the desired signal.
V. CONCLUSION
We have applied the least-squares method to adapt the re- generative hybrid array which utilizes both the steering vector and reference signal acquired from the array output to pre- serve the desired signal. We show that similar to the gradient
ANGLE (DEG.)
(a)
-10 -5 0 5 10
ANGLE (DEG.)
(b)
Fig. 8. (a) Array power pattern. a: Regenerative hybrid array; b: Applebaum-type array. (b) a: First-order derivative constraint array; b:
First-plus-second-order derivative constraint array.
search based regenerative hybrid array, the proposed array converges to the steady state of the Applebaum-type array adapted without the desired signal present. The array tran- sient behavior is simulated with weights updated by the Q R
decomposition algorithm. Results show that the least-squares regenerative hybrid array converges much faster than the orig- inal regenerative hybrid array. Simulations of the steady state performance show that the regenerative hybrid array performs better than high-order derivative constraint arrays.
REFERENCES [l]
[2] [3]
S. P. Applebaum, "Adaptive arrays," IEEE Trans. Antennas Prop- agat., vol. AP-24, no. 5, pp. 585-598, Sept. 1976.
B . Widrow, P. E. Mantey, L. J . Griffiths, and B. B. Goode, "Adaptive antenna systems," Prm. IEEE, vol. 55, pp. 2143-2159, Dec. 1967. R. T. Compton, Jr., "Pointing accuracy and dynamic range in a steered beam array," IEEE Trans. Aerospace Electron. Syst., vol. AES-16, no. 3, pp. 280-287, May 1980.
- , "The effect of random steering vector errors in the Applebaum adaptive array," IEEE Trans. Aerospace Electron. Syst., vol. AES- 18, pp. 392-340, Sept. 1982.
YEH et al. : LEAST-SQUARES REGENERATIVE HYBRID ARRAY 497
-
, “An adaptive array in spread spectrum communication,” Proc. IEEE, vol. 66, pp. 289-298, Mar. 1978.F. Haber, Y. Bar-Ness, and C. C. Yeh, “An adaptive interference cancelling array utilizing hybrid techniques,” ZEEE Trans. Aerospace Electron. Syst., vol. AES-19, pp. 795-803, Nov. 1983.
C. C. Yeh, “Hybrid adaptive array processing utilizing directional con- straints and signal structure,” Ph.D. dissertation, Univ. Pennsylvania, Philadelphia, 1983.
D. M. DiCarlo and R. T. Compton, Jr., “Reference loop phase shift in adaptive arrays,” IEEE Trans. Aerospace Electron. Syst., vol. AES- C. C. Yeh, T. H. Chao, and F. Haber, “Regenerative hybrid arrays for interference suppression,” IEEE Tmns. Aerospace Electron. Syst ., vol. 25, pp. 351-361, May 1989.
T. H. Chao, “Regenerative beam-constrained hybrid arrays for data communications,” Ph.D. dissertation, Univ. Pennsylvania, Philadel- phia, 1988.
S. Haykin, Adaptive Filter Theory. Englewood Cliffs, NJ: Prentice- Hall, 1986.
C. R. Ward, A. J. Robson, P. J. Hargrave, and J. G. McWhirter, “Application of a systolic array to adaptive beamforming,” Inst. Elec. Eng. Proc., pt. F, vol. 131, pp. 638-645, Oct. 1984.
C. R. Ward, P. J. Hargrave, and J. G. McWhiter, “A novel algorithm and architecture for adaptive digital beamforming,” IEEE Trans. An- tennas Propagat., vol. AP-34, pp. 338-346, Mar. 1986.
M. H. Er and A. Cantoni, “Derivative constraints for broad-band element space antenna array processors,” IEEE Trans. Acoustics, Speech, Signal Processing, vol. ASSP-31, pp. 1378-1393, Dec. 1983. K. M. Buckley and L. J. Griffiths, “An adaptive generalized sidelobe canceller with derivative constraints,” IEEE Tmns. Antennas Prop- agat., vol. AP-34, pp. 311-319, Mar. 1986.
S. P. Applebaum and D. J. Chapman, “Adaptive arrays with main beam constraints,” IEEE Trans. Antennas Propagat., vol. AP-24, pp. 650-662, Sept. 1976.
L. J . Griffiths and C. W. Jim, “An alternative approach to linearly constrained adaptive beamforming,” IEEE Trans. Antennas P r o p - gat., vol. AP-30, pp. 27-34, Jan. 1982.
14, pp. 599-607, July 1978.
with the Department of He became an Associal and a Professor in 1988. processing, bearing and
Chien-Chung Yeh (M’84) was born in Taiwan, Re- public of China, in 1954. He received the B.S. de- gree from National Taiwan University, Taiwan, in 1976, and the M.S. and Ph.D. degrees from the University of Pennsylvania, Philadelphia, in 1981 and 1983, respectively, all in electrical engineer- ing.
From 1983 to 1986 he was an Assistant Professor in the Department of Electrical Engineering, State University of New York, Stony Brook, NY. From 1986 to 1987 he was on a one-year leave of absence Electrical Engineering, National Taiwan University. te Professor at National Taiwan University in 1987,
, His current research interests include adaptive signal I spectral estimations and neural networks.
Wun-Der Wang (S’88-M’88) was born in Nantoe,
Taiwan, Republic of China, on October 9, 1964. He received the B.S. degree in electronic engineer- ing from Tamkang University, Taiwan, in 1986 and the M.S. degree in electrical engineering from Na- tional Taiwan University in 1988.
Since October 1988, he has been with Navy Elec- tronics & Communication School of the Republic of China as an Instructor. His current research inter- ests are in the areas of adaptive arrays and digital signal processing.
Tzy-Hong S. Chao (M’87) was born in Taichung,
Taiwan, Republic of China, in 1956. He received the B.S. and M.S. degrees, both in electronics, from National Chiao-Tung University, Hsinchu, Taiwan, in 1978 and 1980, respectively, and the M.S. and Ph.D. degrees, both in systems, from the University of Pennsylvania, Philadelphia, in 1984 and 1988, respectively.
From September 1985 to January 1989, he was with the Systems Technology Research Group, Tele- vision Research Laboratory, David Samoff Re- search Center, Princeton, NJ, where his research responsibility was in ad- vanced video signal processings. Since Fkbruary 1989, he has been a member of the faculty of Communications Engineering Department, National Chiao- %ng University. His current research interests include adaptive signal pro- cessing, video signal processing, and parallel signal processing.
ests are in the areas of
Jeich Mar was born in Pong-Hu, Taiwan, Repub-
lic of China, on March 7, 1948. He received the B.S.E.E. degree from the Chung Cheng Institute of Technology, Taiwan, in 1970, the M.S.E.E. de- gree from National Taiwan University, Taiwan, in 1974, and the Ph.D. degree in electrical engineer- ing from the University of Southern California, Los Angeles, in 1980.
Since 1974, he has been with the Chung-Shang Institute of Science and Technology, where he is now a Senior Scientist. His current research inter-