國 立 交 通 大 學
資訊科學與工程研究所
碩士論文
為非耦合軟體管線所設計的鎖無關且尊重快取機制
之軟體佇列
Lock-free cache-friendly software queue for decoupled
software pipelining
研究生 : 陳韋任
指導教授 : 楊武 博士
為非耦合軟體管線所設計的鎖無關且尊重快取機制之軟體佇列
Lock-free cache-friendly software queue for decoupled software pipelining
研究生 : 陳韋任
Student : Chen Wen-Ren
指導教授 : 楊武 博士
Advisor : Wuu Yang, Ph.D.
國 立 交 通 大 學
資訊科學與工程研究所
碩士論文
A Thesis
Submitted to Institute of Computer Science and Engineering
College of Computer Science
National Chiao Tung University
in partial Fulfillment of the Requiements
for the Degree of
Master
in
Computer Science and Engineering
September, 2010
HsinChu, Taiwan, Republic of China
為
為
為非
非
非耦
耦
耦合
合
合軟
軟
軟體
體
體管
管
管線
線
線所
所
所設
設
設計
計
計的
的
的鎖
鎖
鎖無
無
無關
關
關且
且
且尊
尊
尊重
重
重快
快
快取
取
取機
機
機制
制
制
之
之
之軟
軟
軟體
體
體佇
佇
佇列
列
列
研
研
研究
究
究生
生
生 : 陳
陳
陳韋
韋
韋任
任
任
指
指
指導
導
導教
教
教授
授
授 : 楊
楊
楊武
武
武 博
博
博士
士
士
國
國
國立
立
立交
交
交通
通
通大
大
大學
學
學資
資
資訊
訊
訊科
科
科學
學
學與
與
與工
工
工程
程
程研
研
研究
究
究所
所
所
摘要
近幾年來,不論是在伺服器或個人電腦領域,多核心平台皆已成為主 流。平行化是能充份利用多核心平台所提供額外計算能力的其中一種方 法。 然而,一般應用程式具有複雜的資料與控制相依性,此種特性使得傳 統平行化技術,如: DOALL 和 DOACROSS,無法應用於其上。 Decoupled Software Pipelining (DSWP)是一新的平行化技術,其擁有平行化一般應用程 式的潛能。然而,DSWP 的成功有賴於處理器之間高速的傳輸與同步。 目 前 DSWP 在商用多核心平台上的效能表現並不理想。其主因在於處理器之 間傳輸與同步基本上有賴於鎖相關、不尊重快取機制的軟體方式達成。 此 種作法將會大幅抵消 DSWP 所可能帶來的好處。 我們為 DSWP 提出一個鎖無關、尊重快取機制的軟體佇列。一個鎖無關 且尊重快取機制的實作需要考慮到記憶體子系統的兩個不同面向,記憶體一 致性 (memory coherence) 和記憶體一貫性 (memory consistency)。我們舉例說 明忽略或混淆前述兩個不同面向將如何導致不正確或無效率的實作。之後, 我們提出一個正確且有效率的實作, 並同時給出了詳細的解釋。由於平行 程式本質上的不確定性,傳統的測試技術無法用來證明其正確性。我們同時 以非正式和正式的方法討論我們實作上的正確性。Lock-free cache-friendly software queue for decoupled
software pipelining
Student : Chen Wen-Ren Advisor : Wuu Yang, Ph.D.
Institute of Computer Science and Engineering National Chiao Tung University
Abstract
Multicore has become a trend on server and client computers in recent years. Parallelization is one way to fully utilize the computing power provided by mul-ticore architectures. Most applications of interest have complex data and control dependency, which make traditional parallelization techniques, such as DOALL and DOACROSS, inapplicable. Decoupled Software Pipelining (DSWP), a new parallelization technique, shows its potential on parallelizing general applications. However, its success relies on fast inter-core synchronization and communication. On commodity multicore platforms, the performance of current DSWP disappoints us since the overhead involving lock-based, cache dishonored software approach offsets the benefit from DSWP.
We present a lock-free, cache-friendly software queue designed for DSWP. A lock-free, cache-friendly solution need take two different aspects of memory sys-tem, memory coherence and memory consistency, into consideration. We show how inattention to these two aspects leads to incorrect or inefficient solutions. We also present our approach to providing a correct and efficient solution with detailed explanation. Due to the nondeterministic nature of parallel programs, traditional testing techniques cannot be used to fully verify the correctness of the implemen-tation. We also discuss the correctness of our implementation both in informal and formal ways.
致
致
致謝
謝
謝
首先,我要感謝我的指導教授,楊武博士。沒有他的意見和建議,這篇 碩士論文無法以它現在的面貌呈現出來。我感謝他在我研究上一路的指引。 此外,他極有耐心修改我的論文,使得這篇論文能論述的有條理,易讀易 懂。對此,我獻上我最誠摯的謝意。 我要感謝資涵。他在我研究的路上給予了許多建議和幫助。是他指引了 我研究最初的方向。我還要感謝徐慰中教授和黃廷祿教授,他們分別在我研 究所和大學時代給予我許多指導。 我還要感謝程式語言與系統實驗室的全體成員。在我低潮的時候包容和 鼓勵我。願大家畢業後人生路上一帆風順。願將來的學弟妹能順利畢業。願 大家以後能經常相聚。 我最深的感謝要獻給我的家人。沒有他們無間斷的支持,我無法克服一 切走到這一步。我還要感謝徐如樺小姐在我研究上的一路陪伴。最後,我要 對我的貓,小子,獻上最深最深的感謝和思念。牠已離我而去,僅以此篇論 文在此紀念牠。The work reported in this paper is partially supported by National Science Council, Taiwan, Republic of China, under grants NSC 96-2628-E-009-014-MY3, NSC 98-2220-E-009-050, NSC 98-2220-E-009-051, and 99-2219-E009-013 and a grant from Sun Microsystems OpenSparc Project.
Table of Contents
摘 摘 摘要要要 i Abstract ii 致 致 致謝謝謝 iii Table of Contents iv List of Figures v List of Tables vi 1 Introduction 1 2 Introduction to DSWP 43 Memory coherence and consistency 9
3.1 Memory coherence . . . 9 3.2 Memory consistency . . . 10
4 The Lock-Free and Cache-Friendly Properties 13 4.1 The Lock-Free Properties . . . 13 4.2 The Cache-Friendly Property . . . 17
5 Implementation and Verification 20
5.1 Implementation . . . 20 5.2 Verification . . . 24
6 Experiment 26
6.1 Platform and Benchmark . . . 26 6.2 Result and Discussion . . . 28
7 Related work 31
List of Figures
2.1 Linked-list traversal loop . . . 5
2.2 DSWP transformation example . . . 5
2.3 DOACROSS and DSWP schedules . . . 6
2.4 Synchronization array hardware model . . . 7
2.5 Transit and COMM-OP delays . . . 8
4.1 The part of Dekker’s algorithm achieving mutual exclusion . . . 15
4.2 Valid executions of Fig. 4.1 on a sequentially consistent multiprocessor system 15 5.1 Class QueueBuffer data members . . . 21
5.2 Class QueueBuffer member functions . . . 22
6.1 Before applying DSWP with OpenMP and QueueBuffer . . . 28
List of Tables
6.1 Experiment Platforms . . . 27 6.2 Benchmark Programs . . . 27 6.3 Experiment Result . . . 29
Chapter 1
Introduction
Since 2003, uniprocessor performance has no more significant improvement [1]. Historically,
microprocessors have been designed to improve the performance by exploiting instruction-level
parallelism (ILP). Techniques used to take advantage of ILP, such as deep pipelines, multiple
instruction issue, speculation, and out-of-order execution, etc., have led to complex processor
design with high power consumption. Recent years, major microprocessor manufacturers, form
Intel and AMD to Sparc and PowerPC, all turn to multicore architectures.
While multicore architectures can improve the performance of multi-threaded applications,
they are not as useful for single-threaded applications. One of the most significant current
re-search topics is to parallelize sequential applications into multi-threaded ones that can take
advantage of the multicore architectures. Conventional parallelization techniques, such as
DOALL and DOACROSS, concentrate on parallelizing counted loops that manipulate very
regular, analyzable structures. These techniques for parallelizing such patterns are used
rou-tinely in scientific and numerical domains with good results [2]. Unfortunately, the patterns
do not appear in general applications. General applications usually have complex control flow,
recursive data structures, or irregular pointer-based memory accesses which renders the above
A new parallelization technique, called Decoupled Software Pipelining (DSWP), shows its
potential on parallelizing general applications [3]. DSWP parallelizes a loop by partitioning the
loop body into pipeline stages. A process consist of producer threads (PROD) and consumer
threads (CONS). Theoretically, the advantage of DSWP compared with DOACROSS is that the
inter-core communication latency was hidden in DSWP by overlapping computation and
com-munication. In practice, the overhead in synchronization and communication between threads
is so large that it negates the above advantage. Thus, the success of DSWP greatly relies on fast
inter-core synchronization and communication. Rangan, R., et al. proposed a hardware, called
synchronization array(SA), that makes inter-core communication as cheap as a load or store on
L2 cache [3].
Due to the lack of hardware support for inter-core communication, DSWP on commodity
multicore platforms did not achieve significant performance improvements.
On multicore platforms, communication between PROD and CONS is via a software queue.
Traditionally, since the software queue is shared among threads, programmers must use
lock-based synchronization primitives, such as a mutex, to prevent data race. Such a coarse-grained
locking approach can significantly offset the parallelism brought up by DSWP.
In this paper, we present a lock-free approach so that PROD and CONS can access the
soft-ware queue concurrently without any lock. However, providing a lock-free approach that is
both correct and efficient is not as easy as it might like. Two different aspects of the memory
system must be addressed while writing correct and efficient lock-free code. The first aspect,
called memory coherence, defines what values can be return by a read operation. The second
aspect, called memory consistency, determines when a written value will be returned by a read.
Memory consistency is often confused with memory coherence. Coherence and consistency are
complementary concepts. Coherence defines the behavior of reads and writes to the same
mem-ory locations, while consistency defines the behavior of reads and writes to different memmem-ory
Memory consistency is a dark corner hidden from programmers writing parallel programs
by using lock-based synchronization primitives. For those who want to bypass those lock-based
synchronization primitives, full understanding of memory consistency is the key to writing
correct lock-free code. It is easy to write lock-free code that only appears to work, but it is very
difficult to write correct one.
When performance matters, programmers need take memory coherence into consideration.
Unnecessary memory traffic introduced by maintaining memory coherence degrades
perfor-mance. Cache-friendly approaches should be taken in order to avoid as much unnecessary
memory traffic as possible.
In this paper, we first give an introduction to memory consistency and memory coherence.
We use Dekker’s algorithm, a classical textbook mutual exclusion algorithm, as an example
to demonstrate how memory consistency issue could break Dekker’s algorithm. Tools and
ap-proaches are introduced for writing lock-free, cache-friendly code. Finally, we present our
im-plementation, a C++ template class QueueBuffer and verify its correctness both in informal
and formal ways.
The rest of this paper is organized as follows: Chapter II gives an introduction to DSWP.
Chapter III gives an introduction to memory coherence and consistency. Chapter IV describes
the ways to achieve the lock-free and cache-friendly properties. Chapter V presents the
imple-mentation of our C++ template class QueueBuffer and verifies its correctness. Chapter VI
Chapter 2
Introduction to DSWP
Today, there are three non-speculative loop parallelization techniques: DOALL [2], DOACROSS
[2], and DSWP [3]. Among these techniques, only DOALL yields speedup proportional to the
number of cores. Nevertheless, programmers often find that DOALL may not be applicable in
general-purpose code. For instance, consider the code in Fig. 2.1a, which is linked-list
traver-sal loop. Figure 2.1b is the corresponding program dependence graph (PDG) which contains
control and data dependences. Those dependences involving recurrences are denoted as dashed
lines in Fig. 2.1b. Dependence recurrence is also a cross-iteration dependence, but not vice
versa. For example, edge 6 → 4 is a cross-iteration dependence but does not involve a
depen-dence recurrence. Because statement 3, 5, and 6 are each part of a dependepen-dence recurrence, loop
iterations cannot be independently executed in separate threads. This makes DOALL
inappli-cable.
On the other hand, both DOACROSS and DSWP can parallelize the above linked-list
traver-sal loop. The difference between DOACROSS and DSWP lies in the way the parallelism is
achieved. DOACROSS distributes all loop iterations on different cores. DSWP, however,
parti-tions the loop body, and each core is responsible for a particular piece of the loop body across
(a) Code (b) PDG
Figure 2.1: Linked-list traversal loop
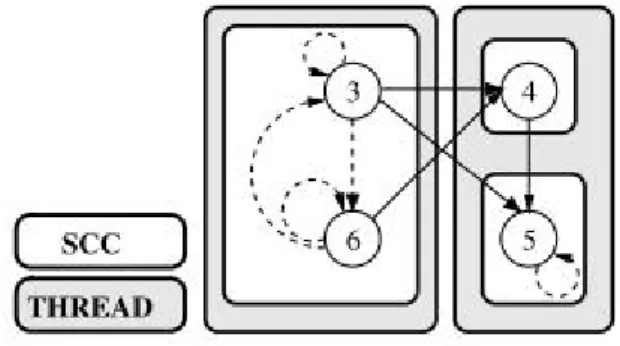
The DSWP algorithm partitions the loop body into pipeline stages. The process consists
of producer threads (PROD) and consumer threads (CONS). The algorithm has three main
steps. First, the algorithm constructs the program dependence graph (PDG) for the loop to
be parallelized. The PDG contains all control and data dependencies in the loop. Second, all
dependence recurrences (i.e., those dependences form loops) in the PDG are recognized by
constructing its strongly connected components (SCCs). A SCC will be the basic scheduling
unit. Finally, the SCCs are distributed on different cores while ensuring there is no cyclic
dependence between cores. Figure 2.2 shows the PDG in Fig. 2.1b after applying the DSWP
algorithm. There are three SCCs node 4, node 5, and the combination of nodes 3 and 6.
Figure 2.2: DSWP transformation example
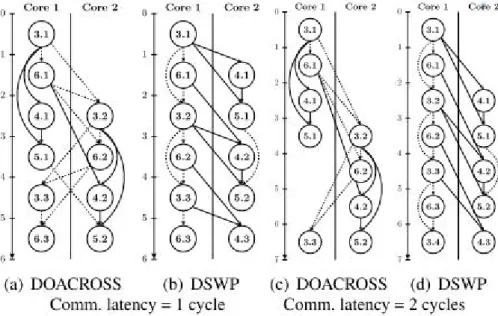
Figure 2.3a and Figure 2.3b give the parallel execution schedules for DOACROSS and
Figure 2.3: DOACROSS and DSWP schedules
DSWP provides significantly more latency tolerance than DOACROSS. In Figure 2.3, the nodes
are numbered with both static instruction numbers and iteration numbers. For instance, the node
3.1 denotes instruction 3 in the first iteration. The communication latency is the time for
trans-mitting a data value from one core to another. When the communication latency is one cycle,
both DOACROSS and DSWP complete one iteration every two cycles. As the
communica-tion latency becomes longer, as shown in Fig. 2.3c and Fig. 2.3d, DSWP still completes one
iteration every two cycles. DOACROSS, however, need three cycles to complete one iteration.
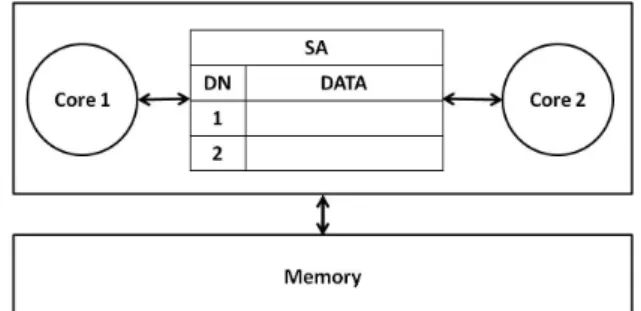
The success of DSWP relies on a hardware, called synchronization array (SA), shown in
Fig. 2.4. [3], which make inter-core communication as cheap as a load or store to L2 cache.
The synchronization array works as a set of low-latency queues associated with dependence
numbers. The instruction-set-architecture (ISA) extension of SA is a set of blocking queues
accessed via the produce and consume instructions. PROD and CONS communicate with
one another through SA by using the produce and consume instructions. The produce
Figure 2.4: Synchronization array hardware model
is enqueued in the queue identified by the dependence number. The consume instruction
dequeues data in a similar fashion [3, 4].
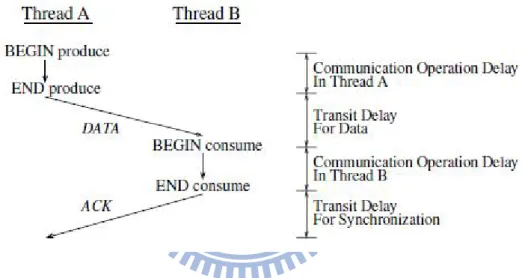
The inter-core communication overheads can be divided into transit delay and
communica-tion operacommunica-tion delay(COMM-OP) [5]. The transit delay refers to the time taken to transfer a
data value from one core to another. The COMM-OP delay refers to the time taken to enqueue
(dequeue) data into (from) the queue.
Figure 2.5 illustrates the effect of COMM-OP and transit delays on the DSWP performance.
In order to send a data value from thread A to thread B, thread A first must ensure the queue
is not full, then fills the queue with the data value. Those operations occur during the time line
segment labeled the COMM-OP delay for thread A. After the transit delay has elapsed, thread B
must check the queue is not empty before consuming the data value from the queue. During the
transit delay, thread A can continue its own work. In other words, the transit delay is tolerated
Chapter 3
Memory coherence and consistency
Programmers need to distinguish two aspects of the memory system behavior while writing
parallel programs.
The first aspect, called coherence, defines what value can be returned by a read operation.
The second aspect, called consistency, determines when a written value will be returned by a
read operation. Coherence and consistency are complementary concepts. Coherence defines
the behavior of reads and writes to the same memory locations, while consistency defines the
behavior of reads and writes to different memory locations [6].
3.1
Memory coherence
Since memory accesses are among the slowest of a CPU’s operations, a multi-level memory
hi-erarchy is introduced into the computer system. Each level in the memory hihi-erarchy is smaller
and faster than the next lower level. Cache is below CPU registers in the memory hierarchy.
When data is not found in the cache, it must be fetched from memory and placed in the cache
before continuing. A processor brings into the cache a cache line during every memory
opera-tion. A cache line is usually 64 bytes on modern multiprocessor systems. On a multiprocessor
data in different local caches. A cache coherence protocol is used to maintain the coherence of
multiple caches. Cache coherence protocols are classified according to the techniques used to
tracking the states of the shared data blocks. There are two broad categories: directory-based
protocolsand snooping protocols.
Cache coherence protocols, however, do not answer the question of when a processor sees
the value that has been updated by another processor. Since processors communicate through
shared variables, the above question becomes the ordering that must be enforced among reads
and writes to different locations by different processors.
3.2
Memory consistency
The most commonly used memory consistency model is sequential consistency, formally
de-fined by Lamport as follows [7]:
[A multiprocessor is sequentially consistent if] the result of any execution is the
same as if the operations of all the processors were executed in some sequential
order, and the operations of each individual processor appear in this sequence in
the order specified by its program.
Lamport also proposed two sufficient conditions for sequential consistency are [7]:
1. Each processor issues memory requests in the order specified by its program.
2. Memory requests from all processors issued to an individual memory module are serviced
from a single FIFO queue. Issuing a memory request consists of entering the request on
this queue.
The first condition is called the program order, which means that the processor may not
means that memory operation X must complete before memory operation Y is done. R and W
denote read and write operations, respectively. The second condition is called atomicity, which
means that memory operations issued by all processors to the same memory location should be
served in the FIFO order. This implies that earlier memory operations being served will not be
interrupted by later ones.
Although sequential consistency is simple and intuitive, it constrains many hardware and
compiler optimizations. Therefore, several relaxed memory consistency models have been
pro-posed as alternatives to sequential consistency. The relaxed memory consistency models are
classified according to the read-and-write orderings that are relaxed. For example, relaxing the
W → R ordering yields models known as total store order (TSO) and processor consistency
(PC).
There is a trade-off between programmability and performance while discussing memory
consistency. The stronger the memory consistency model, the less challenging it is for
pro-grammers, but the more limited it is for hardware efficiency. Relaxed memory consistency
models also provide programmers with mechanisms for overriding such relaxations. For
exam-ple, different kinds of memory fences are provided to enforce ordering constraints on memory
operations issued before and/or after the memory fence [8, 9].
Different combinations of hardware and operating systems may have different memory
con-sistency models. For example, Sun SPARC has a weaker memory concon-sistency model under
Linux (which uses relaxed memory order or RMO) than under Solaris (which uses total store
orderor TSO) [10, 11]. Besides, programming language specifications usually grant compilers
the license to presume that the code is single-threaded. This is true for older languages such as
Fortran, C, C++, that are not designed with parallel programming in mind. Compilers,
there-fore, are free to reorder instructions. This could break the code which appears correct at the
Inattention to the memory consistency issue can result in parallel programs that run
cor-rectly on uniprocessors or hardware with Hyper-Threading, but fail when run on multi-threaded
Chapter 4
The Lock-Free and Cache-Friendly
Properties
In this chapter, we show how the memory consistency issues may break Dekker’s algorithm, a
classical mutual exclusion algorithm. Tools used to writing lock-free code is introduced. Cache
thrashing, which implies low cache utilization due to unnecessary memory traffic, hurts
perfor-mance. We present common cache-friendly strategies that could be adopted when performance
matters.
4.1
The Lock-Free Properties
Since DSWP exploits fine-grained pipeline parallelism in applications [4], fast synchronization
and communication mechanisms are necessary. Use a lock-based approach, such as pthread
mutex lock, to achieve synchronization is infeasible, as such a coarse-grained locking
proach can significantly offset the parallelism brought up by DSWP. Besides, lock-based
ap-proaches come with a lot of pitfalls, from deadlocks and livelocks to priority inversion to
con-voying [13]. With lock-free approaches, synchronization is achieved through lower-level tools
Lamport [15, 7] proved that a queue for SPSC (single producer single consumer) can be
accessed concurrently without explicit lock only if the multiprocessor system is sequentially
consistent. Although Lamport’s conclusion seems heartening, most hardware and compilers
used today do not provide the necessary sequential consistency [9, 16]. We will show how
ordering and atomicity might not hold on modern multiprocessor systems and give an example
demonstrating how the ordering issues break Dekker’s mutual exclusion algorithm.
We discuss the ordering issue first. From the programmers’ point of view, a computer
sys-tem consists of a processor, memory, and the IO subsyssys-tem. In practice, there is a multi-level
memory hierarchy since the significant speed gap between processor and memory. Each level in
the memory hierarchy is smaller, faster than the next lower level. Memory accesses are
expen-sive operations compared to other CPU’s operations. In order to improve the performance of
sequential programs, compilers, microprocessors, and caches put much emphasis on
optimiz-ing memory reads and writes. They may reorder, insert, or remove memory reads and writes in
order to avoid or delay memory accesses.
Here we explain how the ordering issue could break Dekker’s mutual exclusion algorithm
on multiprocessor systems. Figure 4.1 gives the part of Dekker’s algorithm achieving mutual
exclusion. In Figure 4.1, X and Y represent different memory locations; r1 and r2 are registers
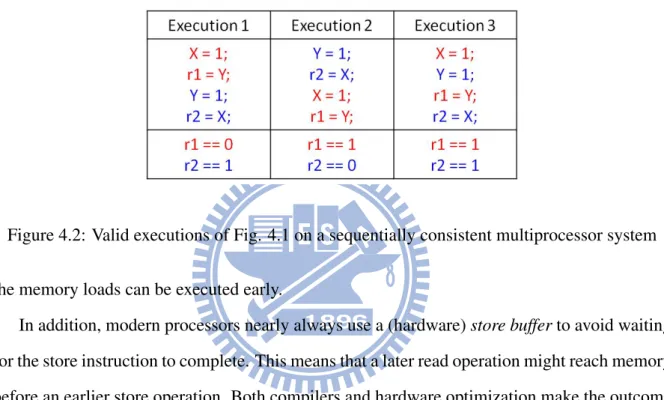
of P1 and P2 respectively. Figure 4.2 gives three possible execution orders that illustrate the
possible final values of r1 and r2 on a sequentially consistent multiprocessor system. Clearly,
it is not possible that both X and Y are zero at the end of execution. This fact ensures mutual
exclusion.
Compilers are allowed to reorder memory operations involving different memory locations.
Since store operations cost much more time than does load operations, compilers will try to
schedule memory loads early. The instructions which depend on those memory loads can be
executed as soon as possible due to the early memory loads scheduling. Take Figure 4.1 as an
Figure 4.1: The part of Dekker’s algorithm achieving mutual exclusion
Figure 4.2: Valid executions of Fig. 4.1 on a sequentially consistent multiprocessor system
the memory loads can be executed early.
In addition, modern processors nearly always use a (hardware) store buffer to avoid waiting
for the store instruction to complete. This means that a later read operation might reach memory
before an earlier store operation. Both compilers and hardware optimization make the outcome
of r1 == 0 and r2 == 0 possible, and hence may break Dekker’s algorithm.
Next we discuss atomicity. On modern multiprocessor systems, atomicity is not always
guaranteed. Consider what may happen if one thread assigns 1000000 to a 32-bit integer
vari-able X on a 16-bit processor while the other thread reads that varivari-able X? The assignment is
translated into two hardware store instructions, one for each 16-bit half-word for the constant
1000000. Without an appropriate lock mechanism, the other thread might see an “intermediate”
value. Note that common hardware does not guarantee bit-, byte-, or word-stores are atomic.
Any shared data that could be modified has to be protected in some way.
(e.g., mb() in Linux), special API calls (e.g., InterlockedExchange in Windows), and
various special atomic types. Many of them are tedious or difficult to use. Worse still, their
varieties imply that lock-free code is not portable.
In recent years, the computer industry gradually adopts ordered atomic variables as the
main tool to write lock-free code in major programming languages and OS platforms. In short,
ordered atomic variables are safe to read and write by several threads simultaneously without
any explicit locking. Ordered atomic variables guarantee the following properties:
• The read and write operations are guaranteed to be executed under some ordering rules defined by programming languages and libraries.
• Each read or write operation on an ordered atomic variable is guaranteed to be atomic, all-or-nothing.
Many programming languages and libraries now support ordered atomic types that assure
ordering and atomicity:
• Java provides ordered atomic types under the volatile keyword (e.g., volatile int), and solidifies this support in Java 5 (2004).
• .NET added them in Visual Studio 2005, also under the volatile keyword (e.g., volatile int).
• ISO C++ added them to the C++0x Draft Standard in 2007, under the templated name atomic<T>.
• Intel Thread Building Blocks library provides template classes atomic<T>, whichR
implement atomic operations in the C++ style.
li-might not define an ordering rule. For example, functions atomic inc() and atomic add()
provided by Linux kernel only guarantee atomicity but not ordering [9]. Using them to write
lock-free code without any ordering enforcement (e.g., memory fence) is completely wrong.
4.2
The Cache-Friendly Property
Cache on multicore systems, as a two-side sword, can provide significant performance
im-provement or degradation. On the bright side, since cache offers much faster access speed than
memory, cache improves performance. On the other hand, cache thrashing, which implies low
cache utilization due to mismanaged memory traffic, hinders performance. A reason for cache
thrashing is false sharing. False sharing arises from the use of an invalidation-based cache
co-herence algorithm with a single validity bit per cache line. False sharing occurs when a cache
line is invalidated and a subsequent reference causes a miss because some word in the cache
line, other than the one being read, is modified. If the modified word and the word being read
are different, the miss is due to false sharing.
Take DSWP as an example. Without the synchronization array, communication between
PROD and CONS must occur between cache and memory. If PROD (CONS) enqueues
(de-queues) one data element at a time, false sharing might occur. Consider the following scenario:
CONS intends to read a word A in cache line L that is shared with PROD after PROD writes a
different word B in the same cache line L. CONS will have a miss due to false sharing.
The above false-sharing miss could be avoided if PROD (CONS) enqueues (dequeues) one
or several cache lines at a time. Besides, we could allocate variables into different chunks
according to their locality in order to avoid false sharing. Based on the locality, variables can
be broadly divided into the following categories [12]:
• Thread-private variables are private to a given thread and are not shared with other threads. Accesses to thread-private variables tend to be very fast and will not consume bus
band-width.
• Shared read-only variables are shared among multiple threads, but are not modified by them. Since there are no writes, every thread tends to keep its own copy in its local cache,
as long as it fits.
• An exclusive variable is read and written by multiple threads, but is protected by a lock. Once a thread acquires the lock, the variable will be moved into that thread’s local cache.
At the meantime, no other thread can touch the variable.
• Wild-west variables are read and written by unsynchronized threads. Ordered atomic variables fall into this category.
We prefer thread-private variables and shared read-only variables as they have lower impact
on the bus and do not need synchronization. Moreover, variables of different localities should
not be mixed on the same cache line. Putting a shared read-only variable and a wild-west
vari-able on the same cache line impedes access to the shared read-only varivari-able because accesses
to the wild-west variable will cause the cache line ping-ponging between threads.
The techniques used to layout those variables in a specific way include padding and
align-ment [17]. Padding simply puts a block of useless bytes between variables as needed.
Align-ment, however, is not so straightforward. Compilers align variables according to some rules.
For example, an int variable will be aligned to its native word size.
Compiler vendors provide programmers with various mechanisms to change compilers’
alignment rules. For example, GCC has a syntax extension attribute ((aligned())).
In order to unify alignment mechanisms, ISO C++ adds a new language syntax attribute to
the forthcoming C++0x Standard [18]. One of the attribute tokens defined in the standard
is align, which specifies the alignments as programmers require.
blocked for waiting for an event. When the event occurs, thread A might be scheduled to run
on core 2 by the OS. It is possible that some data modified by thread A still stay in the cache
of core 1. The data must be flushed from the cache of core 1, then placed in the cache of core
2. The cost is even higher when core 1 and core 2 belong to different groups on Non-Uniform
Memory Access (NUMA) machines.
Processor affinity, which binds a thread to a particular core, is one way to solve the above
problem. If data is left in the cache from the previous time the thread ran, then cache thrashing
caused by thread migration can be avoided. Processor affinity works well for single-threaded
applications, but may not always work for multi-threaded applications. There are two rules of
thumb when applying processor affinity on multi-threaded applications: First, binding threads
to one core or on cores with shared cache when those threads have shared data. Second, binding
Chapter 5
Implementation and Verification
In this section, we present our implementation of the QueueBuffer class, and explain its
correctness both in informal and formal ways.
5.1
Implementation
We present the C++ template class QueueBuffer, which is a lock-free, cache-friendly,
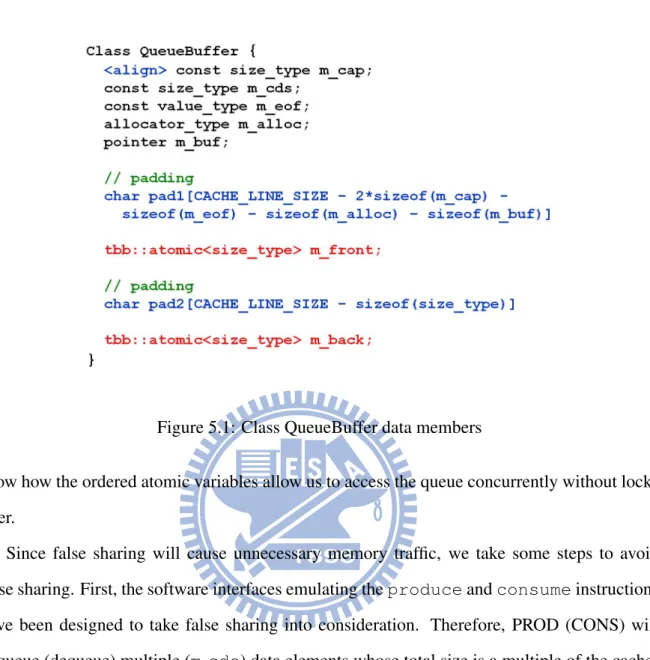
STL-compliant queue. Figure 5.1 shows the data members of class QueueBuffer. The most
im-portant data members are m front and m back, which are shared, mutable variables.
Compil-ers do not yet support ordered atomic types defined by the forthcoming C++0x Draft Standard.
So we declare them as ordered atomic variables by using the template class atomic<T>
pro-vided by Intel Threading Building Blocks library. An atomic<T> class supports atomicR read, write, fetch-and-add, fetch-and-store, and compare-swap operations. For reads and writes,
their default memory fences are acquire and release, respectively.
Hence, the ordered atomic read is also known as a acquiring read, and the ordered atomic
write is also called a releasing write.
Figure 5.1: Class QueueBuffer data members
show how the ordered atomic variables allow us to access the queue concurrently without locks
later.
Since false sharing will cause unnecessary memory traffic, we take some steps to avoid
false sharing. First, the software interfaces emulating the produce and consume instructions
have been designed to take false sharing into consideration. Therefore, PROD (CONS) will
enqueue (dequeue) multiple (m cds) data elements whose total size is a multiple of the
cache-line size at a time. Second, according to the locality as illustrated in section 4.2, we group class
QueueBufferdata members into different chunks that are multiples of the cache line size and
aligned on cache line boundaries by using alignment and padding. Data members are aligned
to the cache-line boundary. Padding is added between different groups of data members. Most
compilers do not yet support attribute defined by the forthcoming C++0x Draft Standard.
Therefore, we have to use compiler-specific syntax extensions to control a compiler’s alignment
operations.
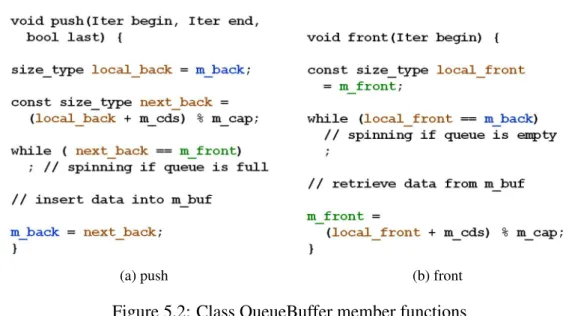
(a) push (b) front
Figure 5.2: Class QueueBuffer member functions
PROD and CONS, respectively. We use m back and m front to check if the queue is empty
or full. The queue is empty when m back == m front and is full when (m back + m cds) %
m cap== m front. We now show how atomic<T> allows us to access the queue
concur-rently without locks. First, although m back and m front are shared, mutable variables, they
are safe to be read and written by PROD and CONS simultaneously without locks as atomicity
is guaranteed by atomic<T>.
Second, as pointed out by [19, 20, 21], there is an ordering problem between PROD and
CONS. CONS might see that m back has been incremented by PROD before it sees the change
to the corresponding m buf slot if the memory consistency model is very relaxed. The solution
proposed by [19] is to use mutexes to flush the cache. We do not need mutexes here since the
ordered atomic write associated with a release fence which guarantees the change of m buf
slot occurs before it. We show the queue can be accessed concurrently without locks.
When writing parallel programs, we need to understand the ordering rules provided by
pro-gramming languages and libraries. For the problem in Dekker’s algorithm as demonstrated in
Section 4.1, acquiring reads and releasing writes do not fix the problem. Instead, the fix needs
As shown in Figure 5.2a and Figure 5.2b, m back and m front are copied to local
vari-ables local back and local front before checking if the queue is empty or full. Since
m backand m front are only written by PROD and CONS, respectively, we are free to do
so. Because local variables can be cached in registers or cache, doing so can avoid reloading
the ordered atomic variables unnecessarily.
There is one last thing that needs to be considered. In DSWP, both PROD and CONS are in
a continuous loop of accessing the queue. We need to terminate CONS when PROD produces
no more data. When writing a sequential program or a parallel program with locks, we can
associate an EXIT flag with the queue. When PROD produces no more data, the queue’s EXIT
flag is set to true. When CONS tries to dequeue data, if the queue is empty and the EXIT flag
is true, then CONS exits the loop.
The above approach might not work for a lock-free parallel program. A typical pattern
for lock-free programs is do the work off to the side, then publish each change to the shared
data with a single ordered atomic write or compare-and-swap [22]. The difficulty of writing
lock-free code is that we are only allowed to use a single ordered atomic write or
compare-and-swap operation to update the shared object. In our case, PROD will update m back after
inserting data elements into the m buf slot. And CONS will update m front after retrieving
data elements from the m buf slot. We cannot update m back and the EXIT flag at the same
time.
There is another approach, however. Stopping CONS can be accomplished by having PROD
pass an EOF through the queue. When CONS receives an EOF, CONS exits the loop.
The member function push back n in the QueueBuffer class requires a parameter,
last iter, set by PROD when there is no more data. Then push back n will insert an
m eof whose value is a template argument provided by programmers. The m eof has to be
inserted with the last chunk of data. If not, since the front n member function will return
5.2
Verification
u n s i g n e d head , t a i l : 1 6 ; u n s i g n e d c d s : 16 = 1 ; u n s i g n e d c a p a c i t y : 16 = 1 6 ; a c t i v e p r o c t y p e p r o d u c e r ( ) { do : : ! ( ( h e a d + c d s ) % c a p a c i t y == t a i l ) −> p r i n t f ( ” P r o d u c e \ n ” ) ; h e a d = ( h e a d + c d s ) % c a p a c i t y ; od } a c t i v e p r o c t y p e c o n s u m e r ( ) { do : : ! ( h e a d == t a i l ) −> p r i n t f ( ” Consume \ n ” ) ; t a i l = ( t a i l + c d s ) % c a p a c i t y ; od }Program 1: SPIN model for class QueueBuffer
As indicated in [23], the non-deterministic nature of a parallel system makes it hard to use
traditional testing techniques to verify the parallel system. Our lock-free queue belongs to this
case. Hence, it is insufficient to run test cases to verify the correctness of our lock-free queue.
Instead, the implementation should be modelled and verified in a formal way. In this paper, we
use the SPIN model checker [24] to verify our design.
The tool we use to check our design is called SPIN, and the specification language that it
accepts is call Promela (Process Meta-Language). Promela is a process modelling language
whose intended use is to verify the logic of parallel systems. It is not to be an
not on computations.
A Promela program is composed of processes, values and message channels. Processes
are global objects that represent concurrent entities of the parallel system. Variables and
mes-sage channels can be defined either globally or locally within a process. Processes specify
their behavior; global variables and message channels together define the environment in which
processes run.
SPIN simulates the operation of a parallel system by running its Promela program. This
is the SPIN simulation mode. SPIN also has verification mode. SPIN can convert a Promela
program into a C source code which is a verifier. Once the verifier discovers flaws in the parallel
system, we can rely on the SPIN simulator to display the error traces.
Since Promela models the synchronization and coordination between processes, we can
ignore the activities occurring within a thread and focus on the interactions among concurrent
processes. Program 1 shows the Promela model for the protocol used by the producer and the
Chapter 6
Experiment
This section describes the platforms and benchmarks we used in our implementation of the
QueueBufferclass.
6.1
Platform and Benchmark
Experiments were conducted on an IBM System x3400 Server [25] and a Sun SPARC Enterprise
T5120 Server [26]. The IBM System x3400 Server is equipped with two quad-core Intel Xeon
E5335 processor. Each pair of cores in a quad-core Intel Xeon E5335 processor share a 4
MB L2 cache [27]. The Sun SPARC Enterprise T5120 Server equipped with one UltraSPARC
T2 processor which has eight cores. All cores in a UltraSPARC T2 processor share a 4 MB L2
cache divided into eight banks [28]. Table 6.1 shows the detailed parameters of our experimental
platforms.
We manually applied DSWP on three linked-list traversal loops in three SPEC CPU2006
benchmarks [29]: 429.mcf, 450.soplex, and 453.povray. We also experimented on a
micro-benchmark, called llubench, which focuses on linked-list manipulation [30]. Llubench was
Machine Name
x86-64
NIAGARA
System
IBM System x3400
Sun SPARC Enterprise T5120
CPU
Intel Xeon E5335
Sun UltraSPARC T2
CPU / System
2
1
Core / CPU
4
8
Thread / Core
1
8
L1 I Cache
32 KB
16 KB
L1 D Cache
32 KB
8 KB
L2 Cache
4 MB
4 MB
Cache Line Size
64 B
64 B
Memory
10 GB
32 GB
OS
Linux 2.6.32
Solaris 10 10/09
Compiler
g++ 4.4
Sun Studio 12 u1 CC
Compiler Optimization
-O3
-xO5
Table 6.1: Experiment Platforms
Program Name Function Input Data Size Description 429.mcf refresh potentiontial test linked-list traversal loop 450.soplex forestPackColumns test linked-list traversal loop 453.povray Build Bounding Slabs test linked-list traversal loop llubench main 1 linked-list traversal loop
1 traverse 100 thousand nodes
is shown in Table 6.2.
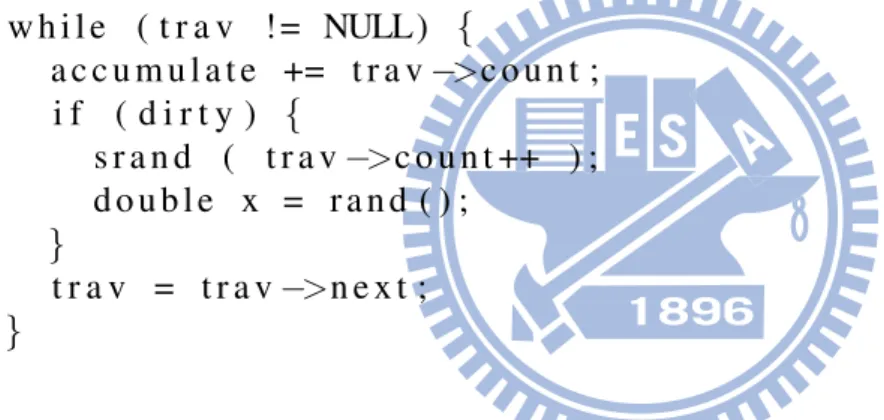
PROD and CONS are extracted from the loops and combined with OpenMP [31] and the
QueueBufferclass. Figure 6.1 and Figure 6.2 show the serial and parallel code for an
ex-ample, respectively. Processor affinity is achieved with platform-specific mechanisms (e.g.,
numactlin Linux or SUNW MP PROCBIND in Solaris). Flawed parallel programs might run
incorrectly on cores with disjoint caches or fail when aggressive compiler optimizations are
turned on. In our experiments, we turn on all possible compiler optimization options, and
also bind PROD and CONS to cores with/without shared cache. The execution results of all
benchmarks were correct. And we use the tick count class provided by Intel ThreadingR Building Blocks to measure wall-clock time.
w h i l e ( t r a v ! = NULL) { a c c u m u l a t e += t r a v −>c o u n t ; i f ( d i r t y ) { s r a n d ( t r a v −>c o u n t ++ ) ; d o u b l e x = r a n d ( ) ; } t r a v = t r a v −>n e x t ; }
Figure 6.1: Before applying DSWP with OpenMP and QueueBuffer
6.2
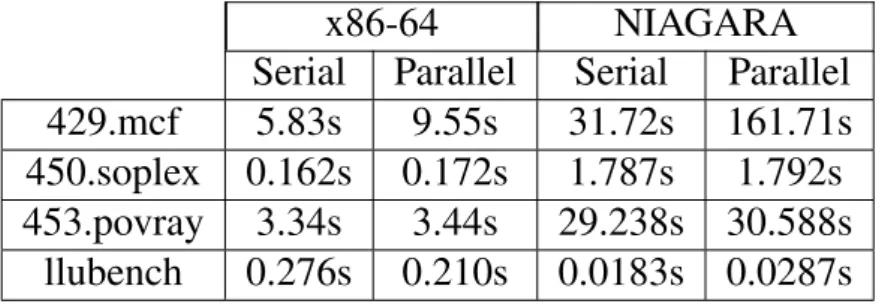
Result and Discussion
Table 6.3 shows the execution times of the serial and parallel versions of the benchmarks. The
parallel version is obtained by translating the benchmarks into the DSWP style. The
paral-lel version shows significant slowdown compared to the serial version. As shown in Figure
9, the parallel version includes additional control flows and auxiliary data structures, which
x86-64
NIAGARA
Serial
Parallel
Serial
Parallel
429.mcf
5.83s
9.55s
31.72s
161.71s
450.soplex
0.162s
0.172s
1.787s
1.792s
453.povray
3.34s
3.44s
29.238s
30.588s
llubench
0.276s
0.210s
0.0183s
0.0287s
Table 6.3: Experiment Result
push back nand front n to access QueueBuffer. Although we can access the shared
resource QueueBuffer concurrently without locks, the cost of function calls are still
consid-ered as overhead.
More efforts are needed to shorten the code sequences in functions push back n and
front n. Doing so makes compilers be able to inline function push back n and front n.
The cost of function calls, therefore, can be eliminated by the inlining.
One might think the shared cache could be a fast communication mechanism, compared with
memory. As mentioned in [32], shared cache could be an alternative communication
mecha-nism among cores when compared with much slower memory. However, in our experiments, we
saw no benefit from shared cache. Apparently, we cannot obtain any benefit from shared cache
automatically. Further detailed profiling is needed to answer why shared cache does not help.
Programmers have no explicit control over cache usage, but only follow general principles.
Pro-grammers might have to craft non-portable code to fully utilize cache. Such an approach might
dswp : : Q u e u e B u f f e r <e l e m e n t ∗> qb ; c o n s t s i z e c d s = qb . g e t c d s ( ) ; # pragma omp p a r a l l e l n u m t h r e a d s ( 2 ) s h a r e d ( qb ) { i f ( o m p g e t t h r e a d n u m ( ) == 0 ) { s t r u c t e l e m e n t ∗ a r r [ 8 ] ; s i z e t i = 0 ; w h i l e ( t r a v ! = NULL) { a r r [ i ++] = t r a v ; t r a v = t r a v −>n e x t ; i f ( ! t r a v ) qb . p u s h b a c k n ( a r r , a r r + i , t r u e ) ; e l s e i f ( i == c d s ) { qb . p u s h b a c k n ( a r r , a r r + c d s ) ; i = 0 ; } } } e l s e i f ( o m p g e t t h r e a d n u m ( ) == 1 ) { s t r u c t e l e m e n t ∗ a r r [ 8 ] ; b o o l f l a g = t r u e ; w h i l e ( f l a g ) { qb . f r o n t n ( a r r ) ; f o r ( s i z e t i = 0 ; i < c d s ; ++ i ) { i f ( a r r [ i ] ) { a c c u m u l a t e += a r r [ i ]−> c o u n t ; i f ( d i r t y ) { s r a n d ( a r r [ i ]−> c o u n t ++ ) ; d o u b l e x = r a n d ( ) ; } e l s e { f l a g = f a l s e ; b r e a k ; } } } } } }
Chapter 7
Related work
Over the past few years, a lot of research results on lock-free queues for SPSC (single producer
single consumer) have been published. Most of them [33, 34, 35] are variations of Lamport’s
queue [15]. However, they all overlooked the atomicity and ordering issues on multiprocessor
systems. As illustrated in Section 4.1, none of them holds inherently on multiprocessor systems.
Some mechanisms have to be adopted to ensure atomicity and ordering.
Therefore, we should carefully consider the atomicity and ordering properties when
im-plementing a lock-free algorithm. We need to handle shared mutable variables carefully even
if they are modified by only one thread. Modifying them without locks even when they are
simple data types (e.g., int) is completely wrong. Declaring them as volatile variables
is also problematic, at least for C/C++ [36, 37]. The volatile keyword in C/C++ does not
ensure atomicity nor ordering. In fact, the purpose of the volatile keyword in C/C++ are:
(1) allow access to memory mapped devices, (2) allow uses of variables between setjmp and
longjmp, and (3) allow uses of sig atomic t variables in signal handlers. These are
com-pletely orthogonal to threads [38].
The other issue is performance. The head and tail indices in Lamport’s queue are called
frequent communications between threads like DSWP, then the producer and consumer threads
have to frequently access control variables from memory. The frequent communication results
in poor performance.
In order to eliminate the overhead of accessing control variables, Giacomoni, et al. proposed
the FastForward queue [39]. The FastForward queue uses the data stored in the queue rather
than control variables to indicate the empty- and full-queue conditions. This technique is called
data/control coupling. For example, if the data stored in the queue are pointers, then we can use
NULL to indicate a buffer slot is empty. In this approach, the control variables (i.e., head and
tail) are thread-local so that they can be kept in the cache.
The FastForward queue solves the problem with Lamport’s queue. However, it has its own
limit. The correctness of the FastForward queue holds only under given assumptions on
multi-processor systems. Coupling data and control into a single operation is assumed to be atomic
in the FastForward queue. Such an assumption is valid only for rare case (e.g., aligned
native-word-size data). Besides, CONS termination might be a problem for the FastForward queue
Chapter 8
Conclusion and future work
In this paper, we present a lock-free, cache-friendly C++ template class QueueBuffer. We
show how memory coherence and consistency play important roles on writing a correct
lock-free code. The difficulty in writing lock-lock-free programs comes from the lack of a memory model
in programming languages. Memory models make reasoning about the correctness of parallel
programs much more formal and easier. Programmers do not need to worry that compilers
and hardware might change the meaning presented by the source code. As an example, Java
programmers can write parallel programs much easier and more comfortable since Java has a
sequential-consistency memory model [40]. On the contrary, C/C++ have no memory model so
far. The bright side is the forthcoming C++ Standard has already defined a memory model [18].
Cache, as a two-side sword, can provide significant performance improvement or
degra-dation of applications. Since there is no explicit control over cache, it is a challenge for
pro-grammers to write cache-efficient programs without precise profiling. In recent years, shared
cache on multicore systems has became an interesting topic. Tian mentioned that the shared
cache could be an alternative communication mechanism among cores instead of the much
slower traditional memory [32]. Using shared cache as an alternative communication
can ensure correctness with ordered atomic types and obtain performance promised by shared
cache at the same time. How to use shared cache as a communication mechanism among cores
depends on the underlying systems. For example, it is possible that the data written by PROD
cannot reach shared cache on time. Then CONS will have a cache miss. This topic needs to be
Bibliography
[1] H. Sutter. (2005) The free lunch is over. [Online]. Available: http://www.gotw.ca/
publications/concurrency-ddj.htm
[2] R. Allen and K. Kennedy, Optimizing compilers for modern architectures: a
dependence-based approach. Morgan Kaufmann Publishers, 2002.
[3] R. Rangan, N. Vachharajani, M. Vachharajani, and D. August, “Decoupled software
pipelining with the synchronization array,” in Proceedings of the 13th International
Conference on Parallel Architectures and Compilation Techniques. IEEE Computer
So-ciety Washington, DC, USA, 2004, pp. 177–188.
[4] G. Ottoni, R. Rangan, A. Stoler, and D. August, “Automatic thread extraction with
de-coupled software pipelining,” in Proceedings of the 38th annual IEEE/ACM International
Symposium on Microarchitecture. IEEE Computer Society, 2005, p. 118.
[5] R. Rangan, N. Vachharajani, A. Stoler, G. Ottoni, D. August, and G. Cai, “Support
for high-frequency streaming in CMPs,” in Proceedings of the 39th Annual IEEE/ACM
International Symposium on Microarchitecture. IEEE Computer Society, 2006, pp. 259–
272.
[6] J. Hennessy, D. Patterson, D. Goldberg, and K. Asanovic, Computer architecture: a
[7] L. Lamport, “How to make a multiprocessor computer that correctly executes multiprocess
progranm,” IEEE transactions on computers, vol. 100, no. 28, pp. 690–691, 1979.
[8] S. Adve and K. Gharachorloo, “Shared memory consistency models: A tutorial,”
Computer, vol. 29, no. 12, pp. 66–76, 1996.
[9] P. E. Mckenney, “Memory ordering in modern microprocessors,” Linux Journal, vol. 30,
pp. 52–57, 2005.
[10] J. Reinders, Intel threading building blocks: outfitting C++ for multi-core processor
parallelism. O’Reilly Media, Inc., 2007, pp. 122–129.
[11] P. McKenney and I. Beaverton, “Memory Barriers: a Hardware View for Software
Hack-ers,” 2009.
[12] S. Akhter and J. Roberts, Multi-core programming: increasing performance through
software multi-threading. Intel Press, 2006, pp. 212–213.
[13] H. Sutter. (2005) The trouble with locks. [Online]. Available: http://www.drdobbs.com/
cpp/184401930
[14] ——. (2009) volatile vs. volatile. [Online]. Available: http://www.drdobbs.com/
hpc-high-performance-computing/212701484
[15] L. Lamport, “Proving the correctness of multiprocess programs,” IEEE Transactions on
Software Engineering, pp. 125–143, 1977.
[16] S. Adve and H. Boehm, “Memory models: a case for rethinking parallel languages and
hardware,” in Proceedings of the 28th ACM symposium on Principles of distributed
computing. Citeseer, 2009, p. 2.
[18] P. Becker. (2010) Programming languages - C++. [Online]. Available: http:
//www.open-std.org/jtc1/sc22/wg21/docs/papers/2010/n3092.pdf
[19] C. SunSoft, Solaris multithreaded programming guide. Prentice-Hall, Inc. Upper Saddle
River, NJ, USA, 1995, pp. 117–118.
[20] H. Sutter. (2008) Lock-free code: A false sense of security. [Online]. Available:
http://www.drdobbs.com/cpp/210600279
[21] Intel Threading Building Blocks - Design Patterns, Intel Crop., 2010. [Online]. Avail-R able: http://www.threadingbuildingblocks.org/uploads/81/91/Latest\%20Open\%20So\
%urce\%20Documentation/Design Patterns.pdf
[22] H. Sutter. (2008) Writing lock-free code: A corrected queue. [Online]. Available:
http://www.ddj.com/high-performance-computing/210604448
[23] S. Padidar, “Parallel Program Verification: A Brief Introduction,” 2010.
[24] G. Holzmann, The SPIN model checker: Primer and reference manual. Addison Wesley
Publishing Company, 2004.
[25] IBM System x3400, IBM, 2007. [Online]. Available: http://www-07.ibm.com/systems/
includes/pdf/XSD02288USEN.pdf
[26] SUN SPARC ENTERPRISE T5120 SERVER, Oracle, 2009. [Online].
Available: http://www.oracle.com/us/products/servers-storage/servers/sparc-enterprise/
t-series/035999.pdf
[27] Quad-Core Intel XeonR Processor 5300 Series, Intel Crop., 2006. [Online]. Available:R
[28] UltraSPARC T2 supplement to the UltraSPARC architecture 2007, Sun
Mi-crosystems, Inc., 2007. [Online]. Available: http://opensparc-t2.sunsource.net/specs/
UST2-UASuppl-current-draft-P-EXT.pdf
[29] J. Henning, “SPEC CPU2006 benchmark descriptions,” ACM SIGARCH Computer
Architecture News, vol. 34, no. 4, p. 17, 2006.
[30] C. Zilles, “Benchmark health considered harmful,” ACM SIGARCH Computer
Architecture News, vol. 29, no. 3, p. 5, 2001.
[31] L. Dagum and R. Menon, “Open MP: An Industry-Standard API for Shared-Memory
Programming,” IEEE Computational Science and Engineering, vol. 5, no. 1, pp. 46–55,
1998.
[32] T. Tian. (2007) Effective use of the shared cache in multi-core architectures. [Online].
Available: http://www.drdobbs.com/high-performance-computing/196902836
[33] Y. Zhang, K. Ootsu, T. Yokota, and T. Baba, “Clustered Decoupled Software Pipelining
on Commodity CMP,” in 14th IEEE International Conference on Parallel and Distributed
Systems, 2008. ICPADS’08, 2008, pp. 681–688.
[34] P. Lee, T. Bu, and G. Chandranmenon, “A lock-free, cache-efficient shared ring buffer
for multi-core architectures,” in ACM/IEEE Symposium on Architectures for Networking
and Communications Systems, 2009.
[35] T. Jablin, Y. Zhang, J. Jablin, J. Huang, H. Kim, and D. August, “Liberty Queues for EPIC
Architectures,” in Proceedings of the Eigth Workshop on Explicitly Parallel Instruction
Computer Architectures and Compiler Technology (EPIC), 2010.
[37] R. Carver and K. Tai, Modern multithreading: implementing, testing, and debugging
multithreaded Java and C++/Pthreads/Win32 programs. John Wiley and Sons, 2006,
pp. 54, 77.
[38] H. Boehm and N. Maclaren. (2006) Should volatile acquire atomicity and thread visibility
semantics? [Online]. Available: http://www.open-std.org/jtc1/sc22/wg21/docs/papers/
2006/n2016.html
[39] J. Giacomoni, T. Moseley, and M. Vachharajani, “FastForward for efficient pipeline
par-allelism: a cache-optimized concurrent lock-free queue,” in Proceedings of the 13th ACM
SIGPLAN Symposium on Principles and practice of parallel programming. ACM, 2008,
pp. 43–52.
[40] J. Manson, W. Pugh, and S. Adve, “The Java memory model,” in Proceedings of the 32nd
ACM SIGPLAN-SIGACT symposium on Principles of programming languages. ACM,