TM05
1520
Proceedings Conference on Decision & Control of the 37th IEEETampa, Florida USA December 1998
A Novel Adaptive Fuzzy Variable Structure Control for
a Class of
Nonlinear Uncertain Systems via Backstepping
Feng-Yih Hsu' and Li-Chen Full2
Dept.
of
Electrical Engineering'
Dept.
of
Computer Science & Information Engineering2
National Taiwan University, Taipei, Taiwan,
R.O.C.
Abstract
This paper presents
a
new design of adaptive fuzzy
variable structure control to solve the traditional prob-
lem of model reference adaptive control (MRAC) for
a
class of single-input, single-output minimum-phase un-
certain nonlinear systems via backstepping. Instead of
taking the tedious coordinate transformation and yield-
ing
a
"hard" high-gain controller, we introduce smooth
B-spline-type membership functions. into the controller
so
as to compensate for the uncertainties much "softer",
i.e.. in
a
much smoother and locally weighted manner.
To
be rigorous, it is shown that the stability of the
closed-loop system can be assured and the tracking error
can globally approach to an arbitrary preset dead-zone
range.
1
Introduction
Based on the differential geometrical approach, most
recent research works on affine nonlinear systems involve
system linearization, i.e. to adaptively cancel the un-
modeled terms which can be linearly parameterizable
[SI. For soiving the state-feedback linearizing contrd
problems. the adaptive backstepping designs have h w n
developed, e.g., [6]-[7].
To
cope with the output feedback
control problems, ix-, which the system nonlinearity de-
pends solely on the output, a filtered transformation and
a
backstepping approach were employed to yield global
asymptotical stability either through some linear param-
eterization process [1],[8] or nonlinear one [2]. It turns
out that the latter nonlinear parameterization charac-
terizes a more general class of the nonlinear systems.
On the other hand, the fuzzy variable structure con-
trol can provide the stability and smoothness
at
the same
time of
a
fuzzy control if the fuzzy control is formulated
in
a
form of variable structure control [16]-[18], or if
a
variable structure control is augmented with some rule-
parameter setting mechanism [19]-[22]. However, a sys-
tematic approach is lacking for enhancing the smoothess
of
a
robust fuzzy control design. In this paper, an
adaptive fuzzy variable structure control with smooth
membership functions and using backstepping concept is
hereby systematically developed
to
yield improved track-
troller. Based on approximation theory, several kinds of
basis function such as sinusoid basis, or Gaussian basis
functions [23], [24], are often incorporated into an adap-
tive controller. In this paper, we choose the smooth
B-spline basis functions as the membership functions in
the paradigm of fuzzy approximation [25]. This choice
is due t o the fact that nonlinear functions whose feature
are mostly strongly local can be represented by some
kind of wavelet transform characterized by smooth and
compact support [26], [28]. Given such smooth B-spline-
type membership functions, the proposed adaptive fuzzy
variable structure controller with a dedicated structure
can adaptively compensate for the system uncertainties,
in a smooth and locally weighted manner, but not t o
evolve into
a
global "hard" high-gain controller 131.
2
Problem Formulation
follows:
Consider an affine nonlinear system of the form
as
x
=
f ( z , a ) + g ( s , a ) uY = h ( z , a ) (1)
where
x
E
Rn,u
E
%,
9
E
%,
and
cy( E
Qa:
a
com-
pact set) is an unknown constant parameter vector which
characterizes the smooth nonlinear function vectors
f,
g, and scalar
k ,
satisfying
f ( 0 ,
a )
=
0,
g(0, cy)#
0
and
If the nonlinear system described in (1) can satisfy
some geometric coordinate-free conditions [l],
then there
exists a coordinate transformation
z=
T ( z )
such that
the nonlinear system can be transformed into the follow-
ing output-feedback form:
i = A z
+
@(U, a )+
b ( a ) b ( y ) uh(0,a) =
0,
V a E
0,.
y = C T Z (2)where
0 1 0...
0 A = [ ! 0 0f
1f
'1:
: ] , @ ( y , a ) = [ @l(Yj '
a )1,
0 0 0...
%(Y, 0) 0 0 0...
b ( a )=
[
, c =[
i]
bn ( a )the vector fields ad)r,O
5 i
5 n -
1, are complete, where T is t h e vector field satisfying0, i f j = O , l , . . . , n - 2
L 4 h =
{
1 , i f j = - 1Furthermore, the system
(1)
is with strong relative
degree
p,i.e.,
L g L $ h ( z , a ) = 0, 0
5
i 5 p - 2 , v z E R,,Va E R,L g L ; - ' h ( z , a )
#
0,va
E R,Here, our control goal is to force the output
y
to follow
a desired trajectory
ym,
constructed by the following
reference model:
im = Aczm+
bmrm ym = CTZ, (3)where
-a1 1 0...
A , =[
-7
0 1::.
.
;I,
.
- - a , - 1 0 0...
-an 0 0...
is a st,able Hurwitz matrix,
bm
=
[0,
. . . ,
b m p ,. . .
,
bmnlT
and
rm
E
L ,
is
a
bounded reference input, or
,y=
~ V , , ( S ) T ,
with
Wm(s)
=
snm+Palsn-i+...+a, S Othat Y m
EL,.
In order to make the model tracking problem more
tractable, we make the following reasonable assump-
tions.
Assumptions:
( A l ) b = [bi
,
. .
.
,
b,IT is a vector of Hurwitz coefficients of degreeb sn-P+...+b,n
p , i.e., the associated polynomial
b1sn-' + b z ~ ~ - ~ + . . . + b ,
is of degree n - p ( i.e., bl
#
0 if p = 1 or bl =...
= b,-1 =0 , bp
#
0 , if p>
1 ) and is Hurwitz;(A2) T h e sign of b p ( a ) is known and constant for any a E R,,
l i p i n ;
(A3) @ ( y , a ) can be expressed as a Taylor's series expansion in y for any a E
a,,
i.e., @ ( y , a ) = @ ( y o , a ) +(A4) Il@(y,a) - @(yo,a)ll
I
MY
- y o , ~ o , a ) l y -vel,
for Somel*(Y - Yo,yo,a)
L
0.Given such tracking problem, we proceed with rear-
C,",lrf*lu=uo(Y -Yo)"]ranging the form
(2)
by the following:
i = A Z - ay
+
ay+
@(y, a )+
b(a)Su= A c z
+
a y+
@ ( y , a )+
b ( a ) 6 uy = C T Z (4)
where
a
= [ul
,
a2,.
. . ,
anIT
and let
W ( s )
be defined
as
which apparently is
a
stable transfer function. Define
the error vector e =
z, - z ,then the error model can be
derived
as
follows:
L . = Ace - a y - @
+
bmrm - bb(y)u( 6 )
T
e , = Y m - Y = C e ,
3
Robust Output-Feedback Variable Structure
Consider t h e case of relative degree p>
1 ( t h e case of p = 1Control via Backstepping
can be intuitively derived ) and a stable filter:1
w
- l s 1Ai
>
0 (7)( ) = (s
+
Al)(S+
A 2 ) .. .
(s+
&I)characterizing the input-output relationship 91 = W f - l ( s ) b ( y ) u ,
which is realized into t h e s t a t e space form as follows:
li
= A f q+
bfb(Y)U, qE
P-'
(8) where - A 1 1 0...
0 - A 2 1...
A f =1
I
6 6
...
..,
1,)
[:I,
0 0 0...
- A , - 17) = [qi
,...,
q p - i ] , and ~ ( 0 ) = 70. Then, augment t h e errormodel ( 6 ) with this filter (8) as follows:
e, = c T e ( 9 )
which is equivalent t o the following:
C
= AcC - a y - @(Y, a )+
bmrm - d ( a ) q le , = C T i ( 1 0 )
from the 1/0 point of view, where d = [ d l , .
. .
,
d , ] is a vectorof Hurwitz coefficients of degree one, derived from t h e following transfer function
- d 1 s n - ' + . .
+
dn- (11)
Apparently, di = b,. After applying the transformation devel-
oped by [ 2 ) , we define a new vector [ = [ [ I , .
. .
,
[,-1IT as follows:s n
+
a l a n - 1 + . . .+
a nwhereby we can obtain a different dynamic model as shown below:
= rc + o e o -c *(U, a )
+
w r ( v m l Fm) ( 1 3 )where
r
is apparently a Hurwitz matrix. From assumption (A4), it can be easily verified thatIlQ(y,a) - @(yrn,a)II
5
L € . ( ~ o , ~ r n , ~ ) l e o l (14)for some / + ( e o , y m , a )
2
0.On the other hand, from the transformation (12) and the equa- tion ( l o ) , the output error model can be expressed as follows:
It is well known that applying the controller design based on the backstepping procedure can solve the control problem with the error model (15) [2]. T h e concepts of the backstepping con- trol are t o first design the designated controller of the first desired filter state, T ; , which can guarantee t h a t the output tracking er- ror eo given in the equation (15) can approach zero, and then t o design the designated controller of the second desired filter state,
q f , which can realize 171 as 1); subject to the equation: i l = -A1171
+
172Similarly, the controller design back steps to the designat,ed con- trol input controller 6(y)u = 7; so that q,-1 can approach 17;-1.
Now, we design a variable structure controller 17; as follows:
17; = s g n ( d i ) k i l e ,
+
s g n ( d l ) k l z ( t ) s g n ( e , ) , (18)with smooth functions k l l ( t ) and k l z ( t ) satisfying the following (17)
expressions:
where qo, € 1
>
0 are positive cznstants, P is a positive definite matrix t o be defined later, andllEll
is constructed from the follow- ing dynamic equation:A h
E
=rE
+
*(y,,a)+
* r ( y m r T m ) , (20)A A
with initial conditions ((0) = E o . Apparently, the system (20)
is B I B 0 stable, since Q ( y r n r a ) and q r ( y m _ , r r n ) are bounded for the bounded yrn, a , and T,, resulting in
E
E ~5k-I. This control law will be shown effective t o the tracking control problem via the following proposit ion.Proposition 3.1 If 01 = 7; as given in the equation (18), then the output tracking error of the system (6) will be driven t o zero globally and exponentially.
To realize the control law (18), apparently, the switching func- tion sgn(e,) will render 17; t o be discontinuous at e, = 0. This fact often causes 0; t o be unrealizable when it comes t o design the subsequent designated controller 7 ; . To resolve this problem, it is straightforward t o modify the previous controller by embedding a smooth compensator for a specified dead-zone range, such as a saturation-type compensator or a hyper tangent-type compen- sator. Then, this controller can be expressed as follows:
( 2 1 )
where k , l ( . j is a smooth function t o make q7f smooth, and
[-A,, A,] is a designated dead-zone range which can be arbitrarily
set. Then, the following proposition is valid.
Proposition 3.2 If the control law 71 = 17; is given as i n equa- tion (21), then the tracking error of the system (6) will be driven
However, in fact 11 is driven by 172 according t o the first or- der equation (17), and hence we define the difference between the desired smooth filter state 17; and the real filter state 7 1 as
71 = 17: - 171, so that its time derivative can be derived from (17)
as follows:
-
As a result, the goal of the control law 172 is apparently t o force 171
t o achieve 17; and, hence, we derive the variable structure control
7; as follows:
17; = X l ? f
+
k 2 l ( t ) G+
k z z ( t ) s g n ( G ) (23)where smooth functions k21(.) and k z z ( . ) satisfy the following
conditions:
87'
k z 2 ( t ) t 1 ~ 1 ( 1 l C 1 1
+
IBI+
I a i l l v m l+
l d i l l 7 f l+
I % l A e ) ( 2 4 )S e , d l
so that the following proposition will be valid.
Proposition 3.3 If 7 2 = 71 i s given as i n (23), then the track- ing error of the system (6) will converge lo the dead-zone range
[-Ae, A,] globally and exponentially.
However, the controller given in (23) again faces the problem with discontinuity so t h a t , similar t o (21), we replace the con- troller (23) with a smooth compensator with the dead-zone range [-Avl, A,,] as follows:
I
86 = ~ l v f + k z ( e , , m , a , ~ , , ~ , , ) (25)
where
k z =
{
:ZI{~)%-+ s~ e o r q l , a r A e , ~ q l ) r k Z z ( t ) s g n ( % ) ,%
otherwise; [:A,1,&,,1; (26)with k , z ( . ) being a smooth function in order t o make 174 smooth. By the same token, the controller design can back steps to the equation containing the real control input:
i l p - 1 = -Ap-117,-1
+
qY)u (27)However, unfortunately, the above controller, can realize its des- ignated controller only up t o the corresponding dead-zone ranges. For example, the controller qi given in (25) can realize 7: given in (21) oniy up t o the dead-zone range [-A,,
,
A , , ] . This fact re-sults in that the former proposition will no longer hold. Thus, we will require additional compensators t o compensate for the back- ward dead-zone ranges, yielding the following set of designated controllers (desired filter states):
t t
8,-1 = A,-28,-z +k,-r
+
k6,-1~ ( Y ) U = 17; = A , - ~ v ~ - ~
+
k p , (28)where k 3 ( . ) ,
...,
k p ( . ) and k s l ( . ) ,...,
are the designated compensators to be defined later, the tracking errors are definedt
as 172 = q2 - ~ 2
...,
, qP-i = qP-, - qp-i corresponding t o the dead-zone ranges [-A,,, A,2],...,
[ - A q p - , , respectively, and-
- t
-
v j ,
asvJ
<
-A,, or11,
>
A,,,:= 0, otherwise (i.e.
6
6 [-A,,,A,,,]);(29)
{ -
so that
-
-v j A = ~ j f o r 5 A # 0 f o r j = l , . . . : p - l
.
Theorem 3.1 If the control law d(y)u = q: i s given as in (28), then the system state in (4) is guaranteed to be bounded and the tracking e w v r of the system ( 6 ) will converge to the d a d - z o n e mnge [-A., A,] globally and exponentially.
Remark: While the given designated controllers are not smooth,
then the subsequent designated controllers will be hardened with high-gain since the controllers contain the differential terms, e.g.,
2,
2,
e,
e..,4
[3]. Besides, it is difficult t o realizethese designated controllers when considering the uncertainties of the controlled system. In the following section, we will propose an adaptive fuzzy variable structure control t o solve the above men- tioned problem.
'
0qt hth p - 2
4
Adaptive Fuzzy Variable Structure Control
Consider a
fuzzy controller input (vector) ~f = [ u f l ,
...
, u f p I T , consistingof p multi-input single-output (MISO) fuzzy controls, which are respectively characterized by
where u f i ( w l , .
. .
,
wi) is the i-th fuzyy controller, w1,.
.
.,
w p are defined as input fuzzy variables(30) T
- -
w = [w1,...,wpIT = [ e o , n , . . . , v O - 1 1
and R,, [ - Y A l , T A l ]
,
Rw2 [-YAz,YAz],...,
Rwp [-YAP, TAp], with Y being an arbitrarily large positive integer, and A , ,. .
.,
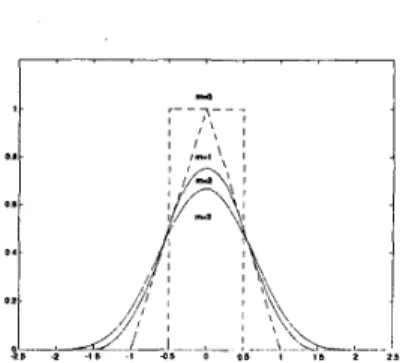
A p being some positive real numbers. Here, eachof the membership functions is given as an m-th ( m
2
2) ordermultiple dimension central B-spline function (as depicted in Fig. I), of which the j - t h dimension is defined as follows:
k = O
where we use the notation
"+ := rnax(0, x ) (32)
The rn-th order B-spline type of membership function has the
e an ( m - 1)-th order continuously differentiable function, i.e.,
e local compact support, i.e., NmJ(z)
#
0 only for I Efollowing properties:
N m J ( 2 ) E C m - l ; [-?A,, T A , ]
o ~ ~ ~
> 0
(for 22 E )( - T a l ,
?A,)e symmetric with respect t o the center point (zero point)
Then the membership functions for the j - t h fuzzy variable wj are defined as follows:
, ~ j , ( ~ j ) Nmj(wj
-iAj),
i= -T,...,O,..',T
(33)whose compact support is given as:
.:t
Figure 1: The rn-th
order
B-spline basis
for m=O, 1, 2,
and
3
for j = l , . . . , p which means that w J E i n t ( R w j i ) implies t h a t pji(wj)
>
0. Apparently, we can get R w j E U ; ~ { - ~ , . . . , T } R ~ ~ ~ G[-TAJ, YAj]. Besides, it is possible that RWji f l RWjk
# 0,
for some i#
k , i.e., wj can simultaneously fall into several compactsupports. It is interesting t o note that the indices labeling those supports can be reexpressed as:
r c j ( w j ) I { i : w j E int(nwj i), i E 2 , --T 5 i 5 1) P t i : " w j i C n c j ( w j ) > (35)
where Rcj (wj) is the union set of those compact supports, defined as follows:
which means t h a t i E Zcj(wj) if and only if w j E R c j ( w j ) . As a general representation of the MISO fuzzy controller with center average defuzzifier, inference with product compositional operator, and singleton fuzzifier [24], we can represent the above fuzzy controllers as follows:
..
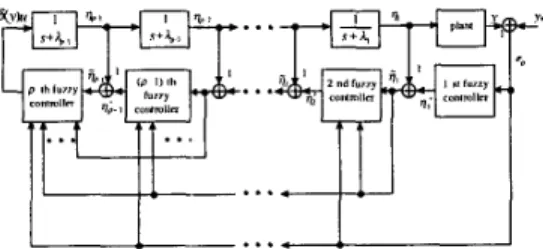
Figure
2:
The block diagram
of
the closed-loop system
with
p2
2
Oi ,...ik is the parameter of t,he k-th fuzzy controller associated with the indices i l
. . .
i k , u ( ~ ) and are the vectors consisting of ui l . . . i k andOil...ik
for i l =-T,..
.
J,...,
ik =-T,...
,T,
respectively. The block diagram of the overall closed-loop system is depicted in Fig. 2. Furthermore, we realize the adaptive fuzzy variable structure control law as an integrated control consisting of the former fuzzy control vector uf and a supervised control vector
=[%,
' .
.,
as follows:If w 1 E R u I 1 . t h e n 0: = s g n ( d l j ( u f , + k f l w l ) : o t h e r w i s e q [ = 11
I f " 2 E R u s Z , t h e n 0' 2 - - A 1 q I
+
u f 2+
k f 2 w 2 : o t h e r w i s e 0::= e
I f u p E n u . p , the,, v t
,
= x ++
u f ,+
k f , w p : o t h e r w i s e q d =F ( 3 8 )where k j
,
. . .:
kf are some positive constants and -rll = s y n ( d d : l ( l )
7 2 = X l 7 f +Icz(t)
-
Here, the dead-zone ranges are defined as the compact supports of membership functions p l r ( w l ) ,
..
.,
w p r ( w p ) , namely,Then, the following proposition can be established.
Proposition 4.1 If thti control law b ( y ) u = 17: is given U S in
the equations (37), (38) and (391, then there ezist a class of the fuzzy controller vector IL: given as i n (37) which can drive the tracking error of the system (6), w1 (= eo), into the dead-zone range [-A,,,,, A,, j globally and ezponentialiy.
Now, define the optimal parameter vector of the j - t h fuzzy controller as follows:
& ) * - - urgmin{suy,lER ,,....,ur;j-,En,,
,-,
, w , E n w ; , ] \ * w , 0It is, however, that O ( J ) * may not easily be available due t o the complexity of
k,
( t ) and khj ( t ) , j = 1 , ..
.
,
p. Therefore, the fol-... 0 0 5 1 I
I
I
'OFTI
$5 . . .. . .
. ..
. . . , E. 0 0 5 -10,
"51 ...; . . .liI
;
-.a0 . _ _ . . _ . _ : . . . _ _ . . . 3 -10 . . .. .
. . .c
-15 . . _ . . . . _ . . . . _ _ _ . . 8 -uHI ' - ~ . ' ' ~ ~ ' ' ' ~ ~ ~ ' ' - 4 20 do0 0 0 5 I O (15 t l m . l t r ) ,,"7.1.W)Figure
3:
The simulation results for
p= 2
necessary so
zone range: t h a t the tracking error can be driven toward the dead-
g ( p ) =
{
T u ( p j ( w l I . , . , w p ) w p p . for w 1 E a w l . . . . , w p E n w p (42)where W l A = e o A r W 2 n = 9 1 & , ' " 3 w p = ~1 1 p - l ~ . Based on
the control law in (37), (38), (39), and the adaptive law (42), the system can be shown t o achieve appropriate output error conver- gence into a prespecified dead-zone range. This is summarized and proved in the following theorem.
Theorem 4.1 If adaptive fuzzy variable structure control law as given as i n the equations (37), (38), (39) with the adaptive law
(42), then the output tracking error of the system ( 6 ) will be driven to the dead zone range [-A,, , A , , ] globally and asymptotically.
0 . o t h e r w i s e
Remark: T h e fuzzy controller (37) with the adaptive law ( 42) possesses the following advantages:
locally weighted fuzzy controller: Only rules supported by compact set R,j are required t o be updated, and hence, those rules are locally weighted.
0 smooth fuzzy controller: Apparently, the fuzzy controller
(37) can behave as a smoother controller provided the dif- ferentia1 terms
2,
2,
...,
2
can be made small, which then requires t h a t smoother membership functions are adopted. Thus, hardening the controllers with high-gain in the backstepping procedure can be naturally avoided here, if we can choose the membership functions t o be even smoother high order B-spline functions.Consider the system (see [2]) as follows:
x, = x 2 t x y
x 2 = U
Y = 21 (43)
In this example, a = 2 is assumed t o be unknown. T h e system is a relative degree p = 2 system and a stable filter (7) is given as and r,(t) is given as a step input, i.e., r,(t)
=
1. T h e devel-oped adaptive fuzzy variable structure control t o be applied t o
Figure
4:
The bar diagram for the parameters of the fir,
fuzzy controller and control surface
is synthesized as follows: the first fuzzy controller for the desi nated filter state ~1 takes the tracking error e , as its single inp variable w1 whereas the second fuzzy controller takes the trackii error e , and output of the first fuzzy controller as two input vai ables (w1, wz). T h e fuzzy rule number of the first fuzzy control1 is equal t o 27"
+
1 = 11 and that of the second fuzzy controller equal t o 11 x 11 = 121. Moreover, k f l = kfz = 10 is assigned. Fi3 shows that the tracking errors can converge into the dead-zoi
range. Figure 4(a) shows a bar diagram for the final paramete of the first fuzzy controller after updating. Apparently, only a h: of parameters of fuzzy rules had been updated since e , almo stays within the region e ,
<
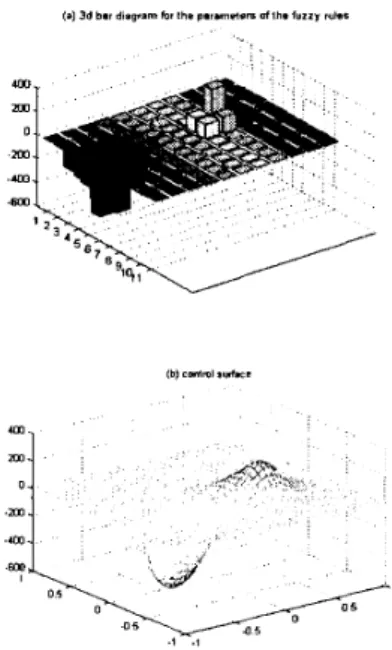
0 durring the task running. Fig. 4(' shows the smooth control surface of the first fuzzy controller. Fi ure 5(a) shows a 3-dimension bar diagram of the final paramete of the second fuzzy controller after updating and Fig. 5(b) shor a 3-dimension plot for smooth control surface of the first fuz: controller.5
Conclusion
In this paper, we proposed a novel adaptive fuzzy variat structure control via backstepping for a class of SJSO nonline systems which can solve the traditional model reference adapti control problem in the presence of system uncertainties. It was ri orously proved that the stability of the overall system is assuri and the tracking error can be driven t o the designated dead-zoi
...
range. Besides, with undesirable chattering from the " hard "high-gain control lawscan be avoided due t o the adoption of the smooth B-spline-type membership functions.Satient features of the present work includes that the involved rules are locally weighted and the output control is rather smooth.
References
[ l ] R i c c a r d o Marino a n d P a t r i z i o T o m e i . " G l o b a l A d a p t i v e O u t p u t - F e e d b a c k
IEEE T h r n r -
C o n t r o l of N o n l i n e a r S y s t e m , P a r t 1: L i n e a r P a r a m e t e r i z a t i o n . "
mfiorir o n A d n m o l i c C n a t m l . uol. 58. I L O 1 . p p . l 7-92. .Irn,rrmy 1993
[ Z ] R i c c a r d o M a r i n o a n d P a t r i r i o Tomei." G l o b a l A d a p t i v e O u t p u t - F e e d b a c k
C o n t r o l of N o n l i n e a r S y s t e m , P a r t 11: N o n l i n e a r P a r a m e t e r i z a t i o n . " I E E E
Tvmrtxretzonr o n A a t m n d r r C n n t v d . rrol. S8. no. l.pp.39-48. , J a r > t u w y 199.i
[3] R . A F r e e m a n and P. V. K o k o t o v i c , " Design of 'Softer' R o b u s t N o n l i n e a r C o n t r o l Laws." A u t o m a t w u . v o l . 29. no. 6 . p p 1425.1437. 1993 [4] R . A . F r e e m a n a n d P. V . K o k o t o v i c . " T r a c k i n g C o n t r o l l e r s f o r S y s t e m s L i n e a r in t h e U n m o d e l c d S t a t e s . " A v t o m o t i r n . ti01 52. I J D . 5. p p . 7.75-745. 1896 (51 S . S h a n k n r S n s t r y a n d A l b c r t o I r i d o r i . " A d a p t i v e C o n t r o l of Lincarivable S y s t e m s . " IEEE ' ? h , w z c t r o n r o n A t r f n m n t r r C o v t r a l . ~ i n l . 34. n o . 1 l . p ~ . 112.7-11?1. 1989
[GI D a v i d G . Taylor. P. V . K o k o t o v i r and R . M a r i n a . " A d a p t i v e Regulation of
N o n l i n e a r S y s t e m s w i t h U n m o d e l e d D y n a m i c * . " IEEE n. .+nit A a t n n i d r r
Conlral. ,mol S4. 18". 4 . p p . 405-412. 1988
[ i ] Ionnnis K n n s l l . , P. V . Kokotovic a n d A. S . M o r s e , " S y s t e m a t i c Design of
A d a p t i v e C o n t r o l l e r s f o r Feedback Lincariznble S y e t e m s . " I E E E 7 h r r z r o r t r o r i r
OIJ A n t n n i d i r Cantml. uol. 56 n o . 1 l . p ~ . 1241-1253. 1991
Miroslnv K r s t i c . a n d P. V. K o k o t o v i c . " A d a p t i v e N o n l i n r a r O u t p u t - F e e d b a c k Schcince w i t h M a r i n o - T o m e i C o n t r o l l e r . " I E E E Tvnnrncl i mt a on A s t o n r n t i c C o e -
t m l . rinl. 41. n o . 2 . p p . 274-280. I 9 9 6
C . J . Chien a n d L. C . Fu. "An A d a p t i v e V a r i a b l e S t r u c t u r e C o n t r o l for a C l a s s
of N o n l i n e a r S y s t e m , " Syrt. Corrt,.. l e f t . . Vol. 21. 0 0 . I . pp. 49-57. I993 R . A . Decarlo.. S . H . Z a k . a n d G . P . M n t t h c w s . 'I V a r i a b l e S t r u c t u r e C o n t r o l
of Nonlinear M u l t i v a r i a b l e S y s t e m s : a t u t o r i a l " P P O ~ : P C ~ ~ ~ ! I ~ OJ t h e IEEE. IWI. 76. pp. 212-252. 1988
[E]
191
[lo]
Figure 5 : The
3d
bar diagram for the parameters of the
second fuzzy controller and control surface
[ l l ] D . S . Yo0 a n d M. J . C h u n g . " A Variabl. S t r u c t u r e C o n t r o l w i t h S i m p l e A d a p t a t i o n L a w s f o r U p p e r B o u n d s on t h e N o r m e of t h e u n c e r t a i n t i e a , " IEEE 7 h n s On A i r t o n i n t i c Contvol. uol. 97. 1992 LIZ] 2 . 4.8. " R o b u s t C o n t r o l of N o n l i n r a r U n c e r t a i n t i e s S y s t e m s u n d e r General- ized M a t c h i n g C o n d i t i o n s , " Aatnmatieo. u o l . 29. pp. 985.908. 1993 [13] C . M . K w a n . . " S l i d i n g M o d e C o n t r o l of L i n e a r S y s t e m s w i t h M i s m a t c h e d uncertainties." A t a t m n n t i r n . ~ w l . S I . pp. 903.307. 1995 1141 G Song, Y . W a n g . L . C a i . and R. W . L o n g m a n " A S l i d i n g - M o d e B a s e d S m o o t h A d a p t i v e R o h u e t C o n t r o l l e r for F r i c t i o n C o m p e n s a t i o n . " P , w c r r d m g oJ t h e A m r n c i m Corrt,ol C o n f r v n c e . 1995 V . S . C R a v i r a j a n d P. C . Sen. " C o m p a r a t i v e S t u d y of P i o p o r t i o i i ~ l - l n t r g r s l
, S l i d i n g M o d e . and F u z z y Logic C o n t r o l l e r s for P o w e r C o n v e r t e r s . " IEEE T v < r , r r .
on l v d i r a l ~ . y Applirsztmn*. trol. R 3 . no. 2. pp. 518.524, 1997
J a c o b S . Glower and Jeffcry M u t t n i g h a n , "Designing F u r r y C o n t r o l l e r s f r o m a
v a r i a b l e s t r u c t u r e s s t a n d p o i n t , " I E E E Twnn. on F?rrry Syaterns. ~ 0 1 . 6 . no. 1. p p . 1 3 8 -
1 4 4 . F i b . 1997
S . - C . Lin a n d Y . - Y . C h r n . "Design of Self-Learning F u m y S l i d i n g M o d e C o n - t r o l k r s B a s e d o n G e n e t i c A l g o r i t h m s . " F u r r y Sctn a n d Svrlo>sr t ~ n l . 8 6 . " 0 . 2 . p p . 1.39-153. Mmv.. 1997
J C . W u a n d T . S . L i u . " F u ~ a y C o n t r o l S t a b i l i z a t i o n w i t h A p p l i c a t i o n s t o M o t o r r y c l e C o n t r o l . " IEEE nvna. o n Su.qtenis. MI^. a r i d C y b e v a e t r r r . PnvtB: Cube,.- rietira. ~ i o l . 26. no. 6 . pp.836-847. D P C . 1996
[19] Feng-Yih H s u a n d L i - C h r n F u . " A d a p t i v e R o b u s t F u m y C o n t r o l for R o b o t M a n i p u l a t o r s " . I E E E C o n J n ~ n c r on n o b n t r r a ond A,rtomnf,ori. p p . 629-634. 1994
[ZO] F e n g - Y i h H s u and L i - C h r n F u . " A New Design of A d a p t i v e F u m y H y b r i d F o r c e / P o s i t i o n C o n t r o l l e r for R o b o t M a n i p u l a t o r s " . I E E E C o a J c r ~ # ~ r r o n Rnbottcr
a n d A a t n r n i i t i n n . p p . 801-808. 1998
Feng-Yih Hau a n d L i - C h r n F u . " A n A d a p t i v e Fuzzy H y b r i d C o n t r o l for R o b o t M a n i p u l a t o r s Following C o n t o u r s of en U n c e r t a i n O b j e c t " . l E E E C n a J ~ w n m O I ) n o h o t i r s f r v d A t ~ t n n i n t r o r i . p p . 2232-2237. 1990 Feng-Yih Hau a n d L i - C h r n F u . " I n t e l l i g e n t R o b o t D e b u r r i n g U s i n g A d a p t i v e Fuzzy H y b r i d C o n t r o l " P m r 27th I n l m ~ r r ~ r l r o n n l S $ I m p " . m m 0.1 I n d w t v i n l Robntr. pp. 847-852. M i l r r r i . I t a l y . 1996 R . n4. S a n n e r a n d J - J E. S l o t i n e . " G a u s s i a n Notworks for D i r e c e t A d a p t i v e C o n t r o l " . I E E E . Tvtzlnr. on Nrtr.al NrIwo.4.a. aol. 3. n o . 6 . p p 837.863, 1992.
L . - X . W a n g . A d a p t i v e F u z z y S y s t e m s a n d C o n t r o l : Design a n d S t a b i l i t y annl-
y s i s . N J : P r e o t i c c H a l l , 1 9 9 4
F - Y . Hsu a n d L . - C . F u . "Recent Progr-se in Fuzzy C o n t r o l . " A C h a p t e r i n
C o n t r o l P r o b l e m s in R o b o t i c s a n d A u t o m a t i o n : F u t u r e D i r e c t i o n s . E d . B r u n o S i c i l l i a n o , S p r i n g e r - V e r l a g . L o n d o n . 1 9 9 7
[26] K . C h u i C h a r l e s . Air Introdurtrnn to I f u w l e f a . W a v e l e t A n a l y s i s a n d I t s A p p l i - c a t i o n , vol. 1. p p . 80-90. 1991
1271 , J o n a s S J O . , Q i m . Zhang.. L e n . L j u n g . ..., " N o n l i n e a r B l a c k - b o x M o d e l i n g
~n S y s t e m I d e n t i f i c a t i o n : a Unified O v e r v i e w , " A r d o m a t r e u u o l . 31. no. 1 2 . PI'. 1725-1 7511. 1995 [28] , A n a t o l i J u d i . . H a k a n H j a l