行政院國家科學委員會專題研究計畫 期中進度報告
微型矽材之諧振式調質薄膜陀螺儀的動力學分析與實驗測
試(1/2)
計畫類別: 個別型計畫
計畫編號:
NSC91-2212-E-002-034-執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日
執行單位: 國立臺灣大學應用力學研究所
計畫主持人: 張家歐
共同主持人: 張簡文添
報告類型: 精簡報告
處理方式: 本計畫可公開查詢
中
華
民
國 92 年 5 月 26 日
行政院國家科學委員會專題研究計劃期(I)中
精簡報告
微型矽材之諧振式調質薄膜陀螺儀的動力分析與實驗測試
Dynamical analysis and exper imental test of silicon-based resonating proofmass
membr ane micro-gyroscope
計劃編號:
NSC-91-2212-E-002-034
主持人:張家歐 共同主持人:張簡文添
執行期間: 91 年 8 月 1 日至 92 年 7 月 31 日
中文摘要
於本計劃內提出一微尺寸陀螺儀的構造設計樣本,並對此陀螺儀作動力學上的分析。以 便正確掌握設計參數值。本計劃分兩年進行,其工作內容為: 第一年,(a) 在沒有剛體 旋轉情況下,不考慮調節質量塊,分析長方型(100)
矽晶格薄板的最低兩個振動模態的 頻率與振幅與 aspect ratio 的關係。 (b)有剛體旋轉情況下, 因載具轉速Ω
相對於矽板 最低彎曲自然頻率ω
1為非常的小,可用微擾法(perturbation method)求第二模態振幅(柯 氏力效應的輸出)的近似解。瞭解 aspect ratio( / )
a b
對輸出信號的增強效益。(c) 在質 量塊的尺寸尚未準確地決定之前,先以正方體為初步考量,以微機電製程作一實體,跟 據我們的 2-D 蝕刻理論來研究外凸角偶補償方式及效果,並以量測非旋轉下輸出信號的 頻率與振幅。 Abstr actwe propose a new design of microscope in this project and performing theoretical analysis so as to gaining the proper design parameters of the gyroscopic system. The contents of the first-year task are: (a) Without rotation and with then proofmass removed we analyze the thin silicon plate of
(100)
lattice plane to find the functional relation between the aspect ratio (i.e., the ratio of the lengtha
to the widthb
) and the natural frequencies. From this relation we can understand the effect of the aspect ratio on the frequencies. (b) Consider the case where the gyroscope rotates with the vehicle, the angular rateΩ
is small incomparison with the first bending natural frequency
ω
1. So we can use the perturbation technique to solve the amplitude of the second mode (i.e., the output mode due to the coriolis foece) in the approximate sense and therefore understand the effect of the aspect ratio on the magnitude of output signal. (c) Before the proper geometry of the proofmass after etching is determined, we consider it to be cubic and investigate the compensation toward the convex corner in order to eliminate the undercut as much as possible. And measure the frequency and amplitude of the second bending mode.理論推導
如圖一,將問題簡化成一平板四端固定於旋轉系統中,此系統在 x 方向給予 Ù 的角速度來 推導運動方程式。
( X ,Y ,Z ) : 慣性座標. ( x ,y ,z) : 旋轉座標 旋轉座標定於平板未變行前邊角之的端點。 問題假設: 1.材料為矽,其材料係數為常數。 2.小變形,變形量與長度比極小,所以只考慮線性項,省略非線性向來近似幾何變形。 3.符合 Kirchhoff 假設,不考慮剪力效應。 4.變形後 Stright line 仍然垂直中心面。 5.transverse 的長度不會改變。 6.經旋轉變形後 transverse 仍然垂直中心面。
幾何變形的描述
如圖二定義如下: 0r
r
:
未變行前向量。u
r:
變形量的向量r
r
:
變形後的向量 0 rr = xir+ +yjr zkr, ur=Uir+ +Vjr Wkr 0 ur =uir+ +vjr wkr, Ω = Ωr ir。
0 rr = + =rr ur xir+ yjr+ zkr+U ir+Vjr+Wkr(1) 由假設 4,5 在 z 方向厚度不會伸長,所以 w 與 z 獨立。 0 zz W z ε = ∂ ∂ = (2) 由假設 6,側向剪應變為 0 圖一 圖二0, 0 xz yz U W V W z x z y ε =∂ +∂ = ε =∂ +∂ = ∂ ∂ ∂ ∂ (3) 平板中心面的位移假設為 ( , , , ) ( , , ) ( , , , ) ( , , ) ( , , , ) ( , , ) U x y z t u x y t z w x V x y z t v x y t z w y W x y z t w x y t = − ∂ ∂ = − ∂ ∂ = (4) 假設小應變但 transverse deformation 可有適度的幾何中等角度的旋轉。則應變與位移關 係式為: 2 2 1 1 ( ) , ( ) 2 2 1 1 ( ) , ( ) 2 2 1 , ( ) 2 xx xy yy xz zz yz U W U V W W x x y x x x V W U W y y z x W U W z z y ε ε ε ε ε ε ∂ ∂ ∂ ∂ ∂ ∂ = + = + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + = + ∂ ∂ ∂ ∂ ∂ ∂ ∂ = = + ∂ ∂ ∂ (5) 將(4)代入(5)得 2 2 2 1 ( ) 2 xx u w w z x x x ε =∂ − ∂ + ∂ ∂ ∂ ∂ 2 1 ( 2 ) 2 xy u v w w w z y x x y x x ε = ∂ +∂ − ∂ +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ 2 2 2 1 ( ) 2 yy v w W z y y y ε = ∂ − ∂ + ∂ ∂ ∂ ∂ (6) 1 ( ) 0 2 xz w w x x ε = −∂ +∂ = ∂ ∂ 1 0, ( ) 0 2 zz yz w w w z y y ε =∂ = ε = −∂ +∂ = ∂ ∂ ∂ 簡化表示成 0 1 0 1 0 1 , 2 xx xx xx xy xy xy xy yy yy yy z z z ε ε ε γ ε γ γ ε ε ε = + = = + = + (7) 其中 2 0 2 1 2 2 0 1 2 0 2 1 2 1 ( ) , 2 , 2 1 ( ) , 2 xx xx xy xy yy yy u w w z x x x u v w w w z y x x x x y v W w z y y y ε ε γ γ ε ε ∂ ∂ ∂ = + = − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + + = − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + = − ∂ ∂ ∂ 0, 0, 0 xx xy yy ε γ ε 為薄膜應變(membrane strains) 1 1 1
,
,
xx xy yyε γ ε
為彎曲應變(bending strains)虛功原理(vir tual wor k)
(U K), δΠ =δ −
U
:應變能 ,K
:動能 平衡時 0 0 ( ) T U K dt δ δ =∫
− 。 (8) 其中應變能展開為 2 2 ( 2 ) h xx xx yy yy xy xy s h U dzdxdy δ σ δε σ δε σ δε − =∫ ∫
+ +(9)
2 0 1 0 1 2 0 1 {[( ( ) ( ) 2 ( )]} } h xx xx xx yy yy yy S h xy xy xy z z z dz dxdy σ δε δε σ δε δε σ δγ δγ − = + + + + +
∫ ∫
0 0 0 1 1 1 ( )dxdy xx xx yy yy xy xy S xx xx yy yy xy xy N N N M M M δε δε δγ δε δε δγ = + + + + +∫
(9) 其中 2 2 2 2 , h h xx xx xx xx yy yy yy yy h h xy xy xy xy N M N dz M zdz N M σ σ σ σ σ σ − − = = ∫
∫
每一 differential element 的速度為 dr dtr , 0 ( ) = ( ) ( ) r r Ui Vj Wk u t Ui V z W j W V y k ∂ = ΩΛ + + + + ΩΛ ∂ + − Ω − Ω + + Ω + Ω r r r r rr & & & r
r
r r
& & & 平板的動能為 2 2 2 h s h K ρ r rdzdxdy − =
∫ ∫
r r⋅ / 2 2 2 / 2 2 [ ( ) 2 ( ) ] h S h U V z W W V y dzdxdy ρ − = + − Ω − Ω + + Ω + Ω∫ ∫
g & & (10) / 2 / 2( h S h K U U V V W W W V δ ρ δ δ δ δ −=
∫ ∫
& &+& &+ & &− Ω &2 2 V Wδ z δV W Wδ z δW −Ω & − Ω &+ Ω + Ω (11) 2 ) V Wδ W Vδ y δW V V dzdxdyδ +Ω g+ Ω g + Ω g+ Ω 其中 , , w w U u z V v z W w x y δ δ δ =δ − ∂ δ =δ − ∂ δ =δ ∂ ∂ & &
& & & & & &
將這代入上式得
2
K=u u& &δ +v v& &δ +w w& &δ − Ωw vδ&− Ωv w&δ + Ω w wδ
2 2 )
v wδ w vδ y δw v vδ y vδ +Ω &+ Ω& + Ω &+ Ω + Ω
(12) 2 2( ) w w w w w w w I dxdy x x y y y y y δ δ δ δ ∂ ∂ ∂ ∂ ∂ ∂ ∂ − + + Ω + Ω ∂ ∂ ∂ ∂ ∂ ∂ ∂
& & & & &
其中 0 / 2 1 / 2 2 3 2 1 0 12 h h I h I z dz I z h ρ − = =
∫
將(10)、(12)代入(8)得 , , , , 0 0 {[ ( ) T xx x xx x xx xx yy y w N u N w M w N v x δ ∂ δ δ δ = − − − − ∂∫
, , , , ( yy )y yy yy xy y xy x w N w M w N u N v y δ δ δ δ ∂ − − − − ∂, , (Nxy w)x w (Nxy w)y w 2Mxy xy w y δ x δ δ ∂ ∂ − − − + ∂ ∂ 0( 2 2
I u u&&δ +v v&&δ +w w&&δ − Ωw v&δ + Ωv w&δ
2 2 2 ) w wδ v vδ y vδ −Ω − Ω − Ω 2 2 2 2 2( 2 2 2 2) ] w w w I w dxdy x y y δ ∂ ∂ ∂ − + − Ω ∂ ∂ ∂ && && [N nxx x u (Nxx w)nx w M nxx x w x x δ δ δ Γ ∂ ∂ + + − ∂ ∂
∫
Ñ
, ( ) xx x x yy y yy y w M n w N n v N n w y δ δ ∂ δ + + + ∂ , , yy y yy y y xy x xy x y w w M n M n w M n M n w y y δ δ δ δ ∂ ∂ − + − + ∂ ∂ , ] xy y xy y x xy y w w M n M n w N n w ds x x δ δ δ ∂ ∂ − + + ∂ ∂ 2 2 2( x y 2) w w w I n n wds x y y δ Γ ∂ ∂ ∂ + + − Ω ∂ ∂ ∂∫
&& &&Ñ
(13) 因δ δ δ 為任意值,它們的係數為零可 Euler-Lagrange 運動方程式u, v, w xy xx 0 N N x y I u ∂ ∂ + = ∂ ∂ &&, xy yy 2 2 0 N N ( 2 ) x y I v w v y ∂ ∂ + = − Ω − Ω − Ω ∂ ∂ && & 2 2 2 xy yy xx 2 2 2 2 2 2 2 0 2 2 2 2 2 ( , , ) x x ( 2 ) ( ) M M M N u v w y y w w w I w v w I x y y ∂ ∂ ∂ + + + = ∂ ∂ ∂ ∂ ∂ ∂ ∂ + Ω − Ω − + − Ω ∂ ∂ ∂ && && && & (14) 令 11 12 12 22 66 0 Q 0 0 0 Q xx xx yy yy xy xy Q Q Q σ ε σ ε σ γ = 11 12 / 2 2 12 22 / 2 66 2 0 0 0 0 h xx xx h yy yy h h xy xy N Q Q N dz Q Q Q N σ σ σ − − = = ∫
∫
0 1 0 11 12 0 1 0 12 22 0 1 0 66 0 A 0 0 0 A xx xx xx yy yy yy xx xx xx z A A z A ε ε ε ε ε ε γ γε γ + + = + 2 11 12 2 12 22 66 1 ( ) 2 0 1 0 ( ) 2 0 0 u w x x Q Q v w Q Q y y Q u v w w y x x y ∂ ∂ + ∂ ∂ ∂ ∂ = ∂ + ∂ ∂ ∂ ∂ ∂ + + ∂ ∂ ∂ ∂ 同理1 11 12 1 12 22 1 66 0 0 0 0 xx xx yy yy xy xx M Q Q M Q Q Q M ε ε γ == 2 11 12 2 12 22 66 2 ( ) 0 D 0 ( ) 0 0 D 2 w x D D w D y w x y ∂ ∂ ∂ = ∂ ∂ ∂ ∂ 其中 1 2 11 12 21 11 22 11 12 21 , , , 1 1 E h E A A A A A E ν ν ν = = = − 3 12 1 66 11 11 1 12 21 , , 12(1 ) G E h A A D E ν ν = = − 3 2 12 12 21 11, 22 11, 66 1 12 E G h D D D D D E ν = = = 不考慮非線性項以幾離心力效應, 2 2 2 2 2
,
,
v
y
w y
−Ω
− Ω
− Ω ∂
∂
去掉,(14)簡化呈下列 運動方程式。 2 2 2 11( 2) 12( ) 66( 2 ) 0 2 u v u v u A A A I x y x y y x t ∂ + ∂ + ∂ + ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ 2 2 2 66( 2) 12( ) 22( 2) 0( 2 2 ) u v u v u w A A A I y x x y x y t t ∂ +∂ + ∂ + ∂ = ∂ − Ω∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ 4 4 4 11( 4) 2( 12 2 66) 2 2 22 4 w w w D D D D x x y y ∂ ∂ ∂ − − + − ∂ ∂ ∂ ∂ 2 2 2 0( 2 2 ) 2( 2 2) w v w w I I t t x y ∂ ∂ ∂ ∂ = + Ω − + ∂ ∂ ∂ ∂ && &&(15)
自然頻率的求解
令 w* w, v* v, u* u,a b a a a = = = = * * * 11 22 , , , , x y x y t t D D a b ϖ = = = = 12 12 66 66 1 2 11 11 11 11 , A D A D A D A D ν = = ν = = 將其代入(15)得 當 a =b 2 * * 2 * * 2 * 1 2 1 2 * * 2 * * 2 * * * ( u ) v( v ) v ( u v ) J u y x y x x y t ∂ + ∂ + ∂ + ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ * 2 * * 2 * 2 * 2( * * *2) 1( * *) ( *2) 1( *2 u v u v v v v J x y x x y y t ∂ +∂ + ∂ + ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ * 4 * 4 * 1 2 4 2 2 * * * * 11 2 w ) ( w ) 2(v 2 )v w t x x y ϖ Ω ∂ ∂ ∂ − − − + ∂ ∂ ∂ ∂ 4 * 2 * * 2 4 2 * * * 11 ( 2 ) w w v J t y t ϖ ∂ ∂ Ω ∂ − = + ∂ ∂ ∂(16)
其中, 2 2 0 1 11 I b J A ϖ = , 4 2 0 2 11 I b J D ϖ = 為定值 無旋轉效應時u*
,
* 0 v =,
且Ω =0,
2 2 2(
2 2)
w
w
I
x
y
∂
+
∂
∂
∂
&&
&&
可省略(16b)與 16a)為非藕合. 先求得在非旋轉項時候的自然頻率以 z 方向的位移場。從(16b) 4 * 4 * 4 * 2 * 1 2 2 4 2 2 4 2 * * * * * ( w) 2(v 2 )v w w J ( w) x x y y t ∂ ∂ ∂ ∂ − − + − = ∂ ∂ ∂ ∂ ∂ (17) 令 * * * * * * * * 0 ( , , ) 0 ( , ) it w x y t =w x y e 帶入(17) 4 * 4 * 4 * 1 2 4 2 2 4 * * * * {( w ) 2(v 2 )v w w x x y y ∂ + + ∂ +∂ ∂ ∂ ∂ ∂ * 2 0 2( *2 )} 0 it w J e t ∂ − = ∂.
(18) 令eit係數為零得到 * 4 * 4 * 4 * 2 0 1 2 2 4 2 2 4 2 * * * * * ( w ) 2(v 2 )v w w J ( w ) x x y y t ∂ + + ∂ +∂ − ∂ ∂ ∂ ∂ ∂ ∂ (19) 由 Rayleigh-Ritz 方法來解自然頻率 其解令為 * * * 0 1 1 M N ij i j i j w C X Y = = =∑∑
其中四邊固定條件下的位移逼近函數 1 2 3 ( ) ( )i 2( )i ( )i i x x x X x a a a + + + = − + 1 2 3 ( ) ( )i 2( )i ( )i i y y y Y y b b b + + + = − +。
(20) 由前面假設知 * * , x =x a y = y b * * * 1 * 2 * 3 * * * 1 * 2 * 3 ( ) ( ) 2( ) ( ) ( ) ( ) 2( ) ( ) i i i i j j j j X x x x x Y y y y y + + + + + + = − + = − + 令 2 * 1 1 2 * * * 2 2 * * 0 0 { [ M N p i j j i j d X d X R Y Y dx dx =∑∑ ∫∫
+ * * 2 * 2 * * * * * 2 * * * * 1 *2 *2 4 i i p q ( j p i q dX dY d Y d X dX dY X Y dx dy dx dy dy dx ν +ν 2 * 2 * * * 2 2 * * ) q i j p d Y d X Y X dx dy + LL 2 * 2 * * * 2 2 * * ] } q i i p ij d Y d Y X X dxdy C dy dy + 1 1 * * * * 0 0 0 { ( ) } M N i j p j ij i j B=∑∑ ∫∫
I X Y X Y dxdy C 上兩項合併得 4 2 0 11 ([ ]R I b [ ]){ } {0}B C D ϖ − = (21)取M=2,N=2 3 3.4479 1.7239 1.72391 0.86197 1.7239 1.1933 0.86197 0.59663 [ ] *10 1.7239 0.86197 1.1933 0.59663 0.86197 0.59663 0.59663 0.39776 R − = 6 2.25195 1.2598 1.2598 0.62988 1.2598 0.68714 0.62988 0.34357 [ ] *10 1.2598 0.62988 0.68714 0.34357 0.62988 0.34357 0.34357 0.1874 B − = 將結果帶入,我們可以的到自然頻率為
( )
2 11 0,
36.9772 1
b
D I
a
=
b
ϖ
=
12 2 21 2 0 0 1 1 76.0322 D, 76.0322 D b I b I ϖ = ϖ = 22 2 0 1 112.9594 D b I ϖ =.
同理我們也帶入不同的 aspect ratio case
2
a
=b
11 2 12 2 0 0 1 1 25.0173 D, 67.7415 D b I b I ϖ = ϖ = 21 2 22 2 0 0 1 1 32.8952 D, 73.6147 D b I b I ϖ = ϖ = 3a
=b
11 2 12 2 0 0 1 1 23.4601 D, 64.1327 D b I b I ϖ = ϖ = = 21 2 22 2 0 0 1 1 26.4544 D, 67.4329 D b I b I ϖ = ϖ = 因為主要探討為 a=b的情況下,所以把此 case 的模態給求出來利用下式子 * * * 0 1 1 M N ij i j i j w C X Y = = =∑∑
當M=1,N=1 當M=1,N=2 0 1 2 3 4 5 0 1 2 3 4 5 0 0.001 0.002 0.003 0.004 0 1 2 3 4 5 0 1 2 3 1 2 3 4 5 -0.0005 -0.00025 0 0.00025 0.0005 0 1 2 3 圖三當M=2,N=1 當M=2,N=2 從上面三個 cases 結果知我們確實可藉設計不同長、寬比值來調整第一與第二模態的自 然頻率,使其非常接近。其中一個模態值如下: 4.73 4.73 4.73 4.73 1 [ x] [ x] 1.0178( [ x] [ x])
x Sin Sinh Cosh Cos
a a a a = − + − 4.73 4.73 4.73 4.73 2 [ ] [ ] 1.0178( [ ] [ ]) 7.853 7.853 7.853 7.853 3 [ ] [ ] 0.9992( [ ] [ ]) 7.853 7.853 7.853 7.853 4 [ ] [ ] 1.0178( [ ] [ ]) y y y y
x Sin Sinh Cosh Cos
b b b b
x x x x
y Sin Sinh Cosh Cos
a a a a
y y y y
y Sin Sinh Cosh Cos
b b b b
= − + −
= − + −
= − + −
旋轉的 Cor iolis force 效應
陀螺儀工作原理主要是利用旋轉的柯氏力 (1)使振動模態產生漂移, 或者是 (2)使振幅 發生改變。藉由量測這些的變化來反算載具的轉速。因矽單晶為非等向性材料,我們現 在研究矽薄板的長、寬比值(aspect ratio)是多少才可具有陀螺儀效果。而陀螺儀效應是來 自動能(12)式的2Ω
w v
&δ
與2Ωv w
&δ
兩項。 考慮四邊簡支撐邊界條件情況,其位移為 1 2 11 11( )sin sin x x w A t a b π π = 1 2 11 11( ) cos sin x x v B t a b π π = (22) 1 2 11 11( )sin cos x x u C t a b π π = 0 1 2 3 4 5 0 1 2 3 4 5 -0.0005 -0.00025 0 0.00025 0.0005 0 1 2 3 4 5 0 1 2 3 4 50 1 2 3 4 5 -0.00005 0 0.00005 0 1 2 3 4 5 圖四 圖五 圖六則 1 2 1 11 11 2 1 2 2 11 11
cos sin cos
sin 2 2( ) sin sin (23) b b a a x x x w v A C a b a x dx dx b a b A C a a b b b a π π π δ δ π π π δ π = = − −
∫∫
&∫ ∫
當 a =b時, (23)式的值為零。 故得知要有柯氏力引起的陀螺儀功能,必須是 /b a>1或 /b a<1。微型矽材之諧振式調質薄膜陀螺儀的實驗
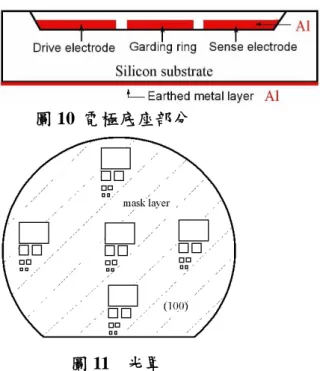
結構設計投影圖如圖七、八所示。 圖 8 微型陀螺儀剖面圖 圖 8 矽底座內紅色部份是鋁金屬(AL),黃色部份是高濃度硼雜質(1×1019以上),此 薄膜陀螺儀裝置可分成上下兩部份如圖 9 與 10 所示,將圖 10 部份的製程稱為A部份製 程,圖 9 部份的製程稱為 B 部份製程。 整個薄膜陀螺儀製程可分成三大部分:即薄膜 的 B 製程,電極底座的 A 製程,與兩者結合的製程。 A部份製程 (A1) 使用厚度 300μm(100)矽晶片(兩面拋光),用熱成長的方法,長 5000Å 的 SiO2 (二氧化矽)的薄膜。(A2) 矽晶片的底部上光阻、曝光、顯影後,以 B.O.E 蝕刻曝光後之部份的 SiO2,接著
再去除光阻,然後使用 KOH 蝕刻矽基材如圖 11 所示,其圖案為光罩(mask)做對準用。
圖 9 陀螺儀薄膜部分
驅動電極區 感測電極區 絕緣區x
z
y
Wp Ws 薄膜 質量塊Ω
圖七圖 10 電極底座部分
圖 11 光罩
(A3) 底座矽晶片的頂部上光阻、曝光、顯影後,以 B.O.E 蝕刻曝光後之部份的 SiO2,
其光罩圖案示意圖如圖 12-a 所示。接著使用硫酸加雙養水去除光阻,然後使用 KOH 蝕 刻矽基材的頂部,接著去除 SiO2完成此步驟之製程如圖 12-b 所示。注意此步驟曝光, 光罩(mask)需使用步驟 2 的圖案做對準。
圖 12-a
圖 12-b
(
A4) 矽晶片的頂部使用濺鍍法鍍鋁約 2000Å 厚度,接著上光阻、曝光、顯影後(注意 此步驟曝光,光罩(mask)需對準步驟 2 的圖案),然後使用 RIE 蝕刻鋁,完成此步驟 之製程如圖 13 所示。圖 13
B 部份製程(陀螺儀薄膜部分) 圖 14 (B1)使用另一組(100)矽晶片,其厚度 300μm(兩面拋光),用熱成長的方法,長 10000Å 的 SiO2(二氧化矽)的薄膜。 (B2)矽晶片的頂部上光阻後,以 B.O.E 蝕刻底部份的 SiO2。 (B3)使用熱擴散法,將矽晶片送入高溫爐管驅入高濃度硼離子(濃度至少為 1×1019 以上)如圖 14 所示。
薄膜部分與電極底座合併製程
(1)
將 A 與 B 部份的晶片,使用加壓加熱法將兩組晶片接和如圖 15 所示,圖中上半部是 屬與 B 部份製程,下半部是屬與 A 部份製程。接合方式可嘗試共晶接合(Eutectic bonding) []方式,要先在薄膜晶片底部鍍上一層金。 圖 15(2)
接和之後,上半部上光阻、曝光、顯影後(注意此步驟曝光,光罩(mask)需對準 A部份製程之步驟 2 的圖案),其光罩圖案示意圖如圖 16-a 所示,中間部份的“四隻腳 “圖案是用來補償,在第一年計劃裡我們暫不考慮底切補償的工作,因它需要事前分析 估算蝕刻時間與補償的程度。這些工作第二年才執行。(3)
使使蝕刻後有較佳正方形圖案。以 B.O.E 溶液蝕刻曝光後之部份的 SiO2,接著使用 硫酸加雙養水去除光阻,然後使用 KOH 蝕刻上半部上矽基材,完成此步驟之製程如圖 16-b 所示。 圖 16-a(4)
使用 B.O.E 溶液蝕刻上下部份之 SiO2,下半部使用濺鍍法鍍鋁約 2000Å 厚度如圖 17所示。
(5)
做基本振動功能量測。我們即將將底座驅動電極通交流電激振矽薄膜,改變電流頻 圖 16-b 圖 17. 率,以顯微雷射都卜勒干涉儀(約10
µ
m
光點)來量薄膜振動位移,由此訊號做 frequency response function 從其可到自然頻率資訊。顯微光學量測的好處是,一. 當激發電路不理 想或失效時,可以輕敲擊矽薄膜取代(因它含所有頻率的 input signals)繼續工作。二. 沒 有感測電極時(因感測訊號處理電路設計不易),它可替代,且工能更多。第一年計劃 不做旋轉的 coriolis force effect 的性能測試。總結
截至 4 月底我們已完成的工作項目總計如下 1.已完成微米調節質量塊矽薄膜陀螺儀的結構雛型設計工作。 2. 對無質量塊、無旋轉狀況下的非等向性薄板振動理論分析已完成,可藉調整 aspect ratio 的值來使輸入與輸出的模態頻率靠近。以便增加輸出訊號的強度。 3. 從理論分析已瞭解要有柯氏力效果必須長寬比不能等於 1. 角速率與振幅的線性相關 性已大部分完成。 4. 振動矽材薄膜質量塊與 pyrex 玻璃的鋁電極已初步試製成功。 5.已完成顯微雷射干涉儀的採購市與測試,即將進行陀螺儀自然頻率的量測。 參考文獻1. R. Szilard, Theory and analysis of plates, Prentice-Hall, 1974. 2. Ashton and Whitney, Theory of laminated plates, Technomic, 1970. 3. J. N. Reddy, Theory and analysis of elastic plates, Taylor &Francis, 1999. 4. Y. Y. Yu, Vibrations of Elastic Plates, Springer, 1996.
5. R. Eley and C. Fox, “Anisotropic effects on the vibration of circular rings of crystalline silicon,” Journal of Sound and Vibration, 228(1), 1999, 11-35.
6. NSC88-2212-E002-012.
7. 張家歐,「 濕式蝕刻理論研究與實驗驗證 (I)」,國科會計劃,NSc89-2212-E002-100. 8. Harris and burdess, “Issues associated with the design, fabrication, and test of a
crystalline silicon gyroscope with electromagnetic actuation and sensing,” J. Micromech. Microeng. 1998, 284-292.