Localizing Combinatorial Properties for Partitions
on Block Graphs
G. J. CHANG AND F. K. HWANG
Dept. of Applied Mathematics, National Chiao Tung University, Hsinchu 30050, Taiwan
Y. C. YAO
Inst. Statistical Science, Academia Sinica, Taipei, Taiwan
Abstract. We extend the study on partition properties from the set partition to the graph partition, especially for the class of connected block graphs which includes trees. We introduce seventeen partition properties and determine their inter-relations. The notions of k-consistency and k-sortability were studied in the set partition to localize the properties, i.e., a global property can be verified through checking local conditions. We carry on these studies for partitions on connected block graphs. In particular, we completely determine the consistency for all the seventeen properties.
Keywords: partition, block graph, tree, penetration, nested partition, consecutive partition, order consecutive partition
1. Introduction
Many optimization problems can be reduced to choosing a partition of a set{1, 2, . . . , n} into p parts so as to maximize an objective function. Since the total number of such par-titions is exponential in n, it will be helpful to identify a smaller class of parpar-titions which contains an optimal one. Such a class is often characterized by a partition property, e.g. consecutiveness, order-consecutiveness, nestedness, full nestedness, and so on. The sizes of the four classes characterized by these properties have been shown to be polynomial in n.
It is usually easier to verify a partition property locally. For example, for some objec-tive function, it can be shown that, for any partition, if one rearranges the elements in a pair of parts in such a way that every element in one part is greater than any element in the other part (this is the consecutiveness property), then the objective function does not decrease. The question is: Can we use this “local” result on consecutiveness to infer the existence of a consecutive optimal partition? While the answer is in the affirmative for this example, our objective is to treat partition properties in a general framework and find “local” conditions which guarantee the existence of an optimal partition having a desired property.
A p-partition is a partition consisting of p parts. Let Q be a partition property. For a given p-partitionπ and a k-subpartition K (k ≤ p), by “Q-sorting K” is meant to rearrange
the elements in the k parts of K such that the resulting k-subpartition has property Q. Note that there can be more than one way to Q-sort K .
All the partition properties we study are hereditary: if a partitionπ has property Q, then every subpartition ofπ has property Q. A property Q is called k-consistent if Q holds for π whenever Q holds for all k-subpartitions of π. Let P be a class of partitions. We say that
P satisfies Q k-locally if for everyπ ∈ P and for every k-subpartition K of π, there exists a
partition in P which is obtained fromπ by Q-sorting K . We say that P weakly satisfies Q
k-locally if for everyπ ∈ P with at least one k-subpartition not having the property Q, there
exists a partition in P obtained fromπ by Q-sorting a k-subpartition that does not have Q. A property Q is called k-sortable if there exists a partition in P having Q whenever P satisfies Q k-locally. A k-consistent property Q is called strongly k-sortable if there exists a partition in P having Q whenever P weakly satisfies Q k-locally. Clearly, strong k-sortability implies k-sortability. It is also known (Hwang et al., 1996) that k-sortability implies k-consistency.
Note that k-consistency and k-sortability are defined independently of any objective function, and are purely combinatorial notions. k-Sortability is often not easy to prove or disprove. Since checking k-consistency is much easier, one may disprove k-sortability by invalidating k-consistency.
Hwang and Chang (1998) extended the set partition problem to the graph partition setting, and viewed the former as a special case of the latter when the graph is a path. They defined consecutiveness, order-consecutiveness and nestedness for the graph parti-tion and obtained some enumeraparti-tion results. In this paper, we study k-consistency and (strong) k-sortability for the above three partition properties and their variations on block graphs.
We conclude this section by briefly indicating how the notion of sortability can be used in an optimal partition problem (the reader is referred to (Hwang et al., 1996) for more details). Suppose that Q is a k-sortable property. Also, suppose that the objective function
f has the following property R: for a p-partitionπ and a k-subpartition K , there exists a
partitionπ0obtained fromπ by Q-sorting K such that f (π0)≥ f (π). Then it follows that the class of optimal p-partitions satisfies Q k-locally. By k-sortability of Q, there exists an optimal p-partition having Q. In the special case that f is additive, the property R is equivalent to the existence of an optimal k-partition having Q. So, if Q is k-sortable, the task of proving the existence of an optimal p-partition having Q is reduced to establishing the existence of an optimal k-partition having Q. The latter is often a relatively simple task if k is small.
2. Properties of the graph partition
For a given connected graph G(V, E), consider the problem of partitioning a subset V0of
V into p nonempty parts. For a subset S of V denote byhSi the subgraph induced by S.
A hull of S is a minimal superset S0of S such thathS0i is connected. In general, S may have more than one hull. In this paper, we will only be concerned with a class of graphs, called block graphs, in which every subset has a unique hull (see Lemma 1 below, also see (Jamison, 1981)). We will denote the unique hull of S by H(S).
A cutpoint of a graph is one whose removal increases the number of components. A nonseparable graph is connected, nontrivial and has no cutpoints. A block of a graph is a maximal nonseparable subgraph. If we take the blocks of a graph G as vertices, then the intersection graph (with an edge for each pair of intersecting blocks) is called block graph of G. It is well known (Harary, 1972) that a graph G is the block graph of some graph if and only if every block of G is complete. In particular, trees are connected block graphs.
A path is chordless if no two vertices nonconsecutive on the path are adjacent in the graph.
Lemma 1. For any connected graph G(V, E) the following are equivalent: (1) G is a block graph.
(2) For any two vertices x and y there exists a unique x-y chordless path. (3) Every subset S of V has a unique hull.
Proof:
(1)⇒ (2). Suppose, to the contrary, that there exist two distinct chordless paths p and q
connecting some vertices x and y. By minimizing|p| + |q|, over all such pairs (x, y), we may assume that p and q are disjoint. So x and y are nonadjacent vertices in a block of G, contradicting assumption (1).
(2)⇒ (3). Let C be a hull of S. Consider the set S0consisting of all vertices in the unique chordless x-y path for all x, y in S. Then S0is a superset of S andhS0i is connected. Since C contains S andhCi is connected, for all x, y in S the unique chordless x-y path is inhCi, i.e., S0is a subset of C. By the definition of a hull, C= S0.
(3) ⇒ (1). If G is not a block graph, then there exists a block containing two
nonad-jacent vertices. Since a block has no cutpoint, there must exist two distinct chordless paths connecting these two vertices. But each such path is a hull of the two vertices,
contradicting assumption (3). 2
Consider a connected block graph G(V, E) and a partition π of V0⊆ V . Let CP denote the set of all cutpoints of G.
Lemma 2. Suppose that A is a part ofπ. Then H(A)\A ⊆ CP.
Proof: From the proof of Lemma 1hH(A)i is the union of all chordless paths connecting pairs of vertices of A. Lemma 2 then follows from the fact that all internal vertices on the
unique chordless path from x to y are cutpoints. 2
For a given connected block graph G(V, E) and a partition π of V0⊆ V , part A is said to penetrate part B, written A→ B, if A ∩ H(B) 6= ∅. The penetration is called inclusive, written A,→ B, if A ⊆ H(B). The penetration graph g(π) of π is a digraph with parts as nodes and penetrations as links. A partitionπ is called nested (N) if g(π) is acyclic; π is called transitivity-nested (T ) if g(π) is a partial order. Two special cases of T are: fully nested(F), when the partial order is linear; and consecutive (C), when g(π) has no
link. A partition is called inclusive(I ) if A → B implies A ,→ B; and called disjoint (D) if A and B not penetrating each other implies H(A) ∩ H(B) = ∅. Note that transitivity could be separated from nestedness to become an independent property, but this property is essentially captured by I in the current context. It should also be noted if V0= V , then C always implies D.
Lemma 3. Inclusive penetration defines a partial order on the parts of a partition.
Proof: It is easily seen that A⊆ H(B) implies H(A) ⊆ H(B). Hence inclusive penetra-tion is transitive. It suffices to prove that inclusive penetrapenetra-tion is asymmetric. Suppose to the contrary that A⊆ H(B) and B ⊆ H(A). Then H(A) = H(B). Clearly, there exists a vertex x∈ A which is not a cutpoint of hH(A)i. Since A ∩ B = ∅, x /∈ B. Hence hH(B)\xi is still connected and contains B, contradicting the definition of H(B). 2
Corollary 1. I implies T .
The properties can be combined, but some of the combinations are redundant. For exam-ple, inclusiveness, inclusive nestedness and inclusive transitivity-nestedness are the same thing and we will only use the first term. Furthermore, the definition of consecutiveness is not affected by the notion of inclusiveness, so inclusive consecutiveness is not needed. On the other hand, inclusive full nestedness (IF) is a legitimate property. The notion of disjoint-ness does not affect the definitions of F and IF. But we do have disjoint nesteddisjoint-ness(DN),
disjoint transitivity-nestedness(DT), disjoint inclusive (DI) and disjoint consecutiveness
(DC).
We now define some properties which treat the partition as an ordered partition. A partition is called order-consecutive (O) if the parts can be labeled V1, . . . , Vp such that Vj9
Sk
i=1Vi for all j> k, k = 1, . . . , p − 1. Similarly, we define inclusive
order-consecutiveness (IO), disjoint consecutiveness (DO) and disjoint inclusive
order-consecutiveness (DIO).
Lemma 4. Suppose thathSi∈IH(Vi)i is connected. Then S
i∈IH(Vi) = H( S
i∈IVi).
Proof: Since H(Si∈IVi) contains H(Vi) for every i ∈ I , it contains S
i∈I H(Vi). On the other hand, Viis a subset of H(Vi), hence
S
i∈IViis a subset of S
i∈IH(Vi). Furthermore, hSi∈I H(Vi)i is connected by assumption. It follows that H(
S
i∈IVi) ⊆ S
i∈I H(Vi). 2
Next we extend a characterization result for order-consecutiveness on the path (Hwang et al., 1996) to the block graph. However, the original proof cannot be easily adapted. A new approach is required.
Lemma 5. An N p-partition is O if and only if there do not exist four parts V1, V2, V3,
V4, all distinct except possibly V3= V4, such that V1→ V3, V2→ V4, V3→ (V1∪ V2) and
Proof:
(i) The “only if ” part. Suppose that an O partition contains four parts V1, V2, V3, V4 as
characterized in Lemma 5. Then the ordering of parts must observe: V1before V3, V2
before V4, V3before either V1or V2, hence before V2, and V4before either V1or V2,
hence before V1. It is easily verified that the conditions are inconsistent.
(ii) The “if ” part. Lemma 5 is trivially true for p= 1 and 2. We prove the general case by induction on p≥ 3. Let π denote an N p-partition of V0. It suffices to prove the exis-tence of a part A ofπ such that A 9 V0\A. Since by induction, π\A is an O (p − 1)-partition of V0\A, it follows from A 9 V0\A that π is an O p-partition.
Since g(π) is acyclic, there exists a minimal part B (a part having no inlink in g(π)) in π. We consider two cases:
Case 1. B is the only minimal part. By induction, there exists a part A inπ\B such
that A9 V0\(A ∪ B). Since p ≥ 3, there exist parts other than A and B. Furthermore, since B is the unique minimal part, all these other parts must be penetrated by some parts, and one of them, say C, must be penetrated by B. ThushH(B) ∪ H(V0\(A ∪ B))i is connected since H(V0\(A ∪ B)) contains H(C) which contains a point of B. By Lemma 4, H(B) ∪ H(V0\(A ∪ B)) = H(V0\A). Since A ∩ H(B) = ∅ and A ∩ H(V0\(A ∩ B)) = ∅, it follows A∩ H(V0\A) = ∅, i.e., A 9 V0\A and A is the part we look for.
Case 2. There exist two minimal parts B1and B2. By induction, there exists a part Ai,
i∈ {1, 2}, in π\Bi such that Ai9 V0\(Ai∪ Bi). If Ai9 V0\Ai for either i , then we are done. So assume Ai→ V0\Ai for both i .
A vertexν ∈ (Ai∩ H(V0\Ai)) is a cutpoint of hH(V0\Ai)i (cf. Lemma 2). Note that Bi and V0\(Ai∪ Bi) are in two different components of hH(V0\Ai)i\ν, (otherwise H(V0\Ai) = H(Bi∪ (V0\(Ai∪ Bi))) ⊂ H(V0\A)i)\ν, a contradiction). Let Ci denote the component containing V0\(Ai∪ Bi). Since Ci is connected to ν, which is in H(A), hCi∪ H(Ai)i is a connected graph containing all vertices in V0\Bibut no vertex of Bi. If Bi9 Ai, then Bi is the part we look for (i.e. Bi9 V0\Bi). Thus we may assume Bi→ Ai for both i . It is easily verified that B1, B2, A1, A2 are distinct except perhaps A1= A2.
By the 4-part condition of Lemma 5, Ai9 (B1∪ B2) for at least one i . Let it be A1. So
we have A19 B1∪ B2and A19 V0\(A1∪ B1). But hH(B1∪ B2) ∪ H(V0\(A1∪ B1))i is
a connected graph since B2is in both B1∪ B2and V0\(A1∪ B1). By Lemma 4,
H(B1∪ B2) ∪ H(V0\(A1∪ B1)) = H(V0\A1).
It follows A19 V0\A1and A1is the part we look for. 2
Corollary 2. Lemma 5 remains valid if N and O are replacedαN and αO, respectively,
whereα ∈ {D, I, DI}.
Corollary 3. C implies O.
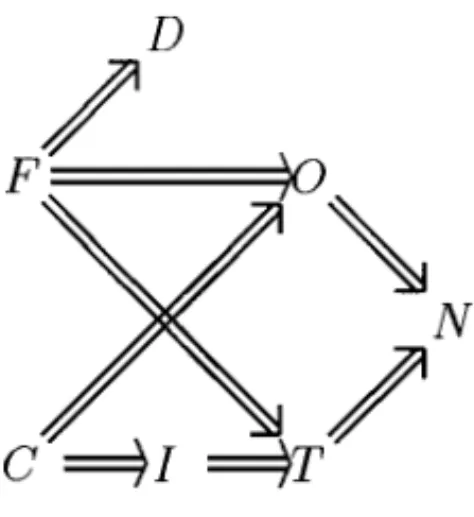
Figure 1. Relations among members of B .
Theorem 1. The relations among members of B are characterized in Figure 1(x ⇒ y
means x implies y).
Proof: F⇒ T, C ⇒ I, F ⇒ D, T ⇒ N and O ⇒ N are obvious. I ⇒ T was given by Corollary 1 and C⇒ O by Corollary 3. We prove the relation F ⇒ O. Let π be an F partition with parts V1, . . . , Vpsuch that Vi→ Vjfor i < j. Suppose to the contrary that the 4-part condition in Lemma 5 is violated, i.e., there exist distinct i, j, k, l (except possibly k= l) such that Vi→ Vk, Vj→ Vl, Vk→ Vi∪ Vjand Vl→ Vi∪ Vj. Then i < k and j < l. Without loss of generality, assume k≤ l. Then i < l. So Vlpenetrates neither Vinor Vj; or equivalently, Vl∩ (H(Vi) ∪ H(Vj)) = ∅. But hH(Vi) ∪ H(Vj)i is a connected graph; hence H(Vi) ∪ H(Vj) = H(Vi∪ Vj) by Lemma 4. It follows Vl∩ H(Vi∪ Vj) = ∅, contradicting the assumption Vl→ Vi∪ Vj.
Next we prove the nonimplication part. It suffices to prove F; I, D ; N, O ; T, C ; D
and I; O. Figure 2 shows these examples. 2
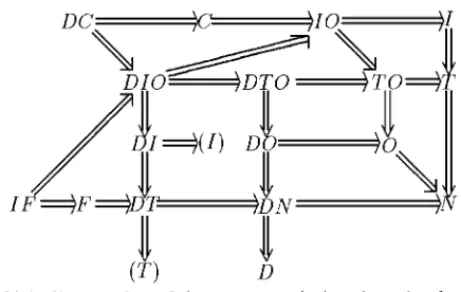
Figure 3. The associated relations.
The relations shown in Figure 3 hold for any b∈B\{I, D}. Combining Figures 1 and 3, we obtain the relations on the 17 properties. It is easily verified that all valid implications are included in Figure 4.
Figure 4. Relations among members of extended B .
3. Consistency
Clearly, k-consistency implies k0-consistency for any k0> k. We now give some results on the minimum consistency index of a property Q, which is defined as inf{k : Q is
k-consistent}, the infimum of the empty set being ∞.
Theorem 2.
(i) The minimum consistency index for I, D, DI, C, DC, and IF is 2. (ii) The minimum consistency index for T, DT and F is 3.
(iii) The minimum consistency index for IO, TO, DIO and DTO is 4. (iv) The minimum consistency index for N, DN, O and DO is ∞.
Proof:
(i) The results for I, D, DI, C and DC follow directly from their definitions. Suppose that IF holds for any 2-subpartition of a partition π. Then g(π) contains no 2-cycle. For IF the links in g(π) are of the ,→ type. Suppose there exists a cycle V1,→ V2,→ · · · ,→ Vk,→ V1in g(π) for k ≥ 3. Since ,→ is transitive, the cycle
im-plies V1,→ Vk,→ V1, contradicting the assumption of no 2-cycle. Therefore, g(π) is
a partial order. Also the partial order is linear since every pair of nodes has a link and no cycle exists.
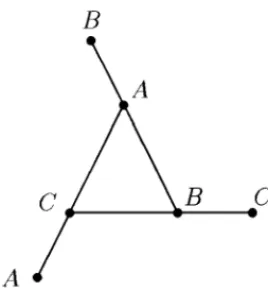
(ii) The partition in figure 5 is not any of T, DT and F. But deleting any part, the remaining partition is T and DT and F (in a trivial way). Hence these properties are not 2-consistent. We now show that they are 3-2-consistent. Suppose to the contrary that g(π) contains a cycle V1→ V2→ · · · → Vk→ V1 for k≥ 4. By assumption penetration
must be transitive on any three parts. Thus V1→ V2→ V3 implies V1→ V3. Using
the same arguement, eventually we obtain V1→ Vk−1→ Vk→ V1, contradicting the
assumption that penetration is acyclic on three parts.
(iii) It was shown (Hwang et al., to appear) that IO, TO, DIO and DTO have the minimum consistency index 4 for the path. Hence their minimum consistency indices are at least 4 for the connected block graph. Letπ be a partition where every 4-subpartition K ofπ is IO. Then K is I and satisfies the 4-part condition of Lemma 5. Clearly, π also satisfies the 4-part condition. Since I is 4-consistent (indeed, 2-consistent),π is
I . Since I⇒ N, by Corollary 2, π is IO. The arguments for TO, DIO and DTO are
analogous.
(iv) We now show that N , DN, O and DO are not k-consistent for any k> 1. Consider the example in Figure 5. Any two parts have the specified properties, but not all three parts. This example can be easily generalized to k> 2 by replacing the triangle in the
middle with a complete graph of k+ 1 vertices, resulting in a connected block graph
of 2(k + 1) vertices. 2
4. Sortability
It appears that k-sortability does not imply, nor is implied by, k0-sortability for k0> k. However, we are still interested in the minimum k since the smaller k is, the easier it is to check the k-local condition. For strong sortability we have the following result.
Theorem 3. Let Q be an hereditary property. Suppose that for every connected block
graph G(with vertex-set V), we can construct another connected block graph ˜G (with
vertex-set ˜V) containing G so that if K is a k-subpartition of G satisfying Q, then K ∪ ( ˜V \V )
is a(k + 1)-subpartition also satisfying Q. Then for the class of connected block graphs,
Q is strongly k0-sortable implies that Q is strongly k-sortable for k0> k.
Proof: It suffices to prove that if Q is not strongly k-sortable, then it is not strongly (k + 1)-sortable. Suppose that Q is not strongly k-sortable. Then there exists a connected block graph G and a class P of partitions of V0⊆ V which weakly satisfies Q k-locally, but does not satisfy Q. Consider the connected block graph ˜G as specified in Theorem 3 and let ˜P be the class of partitions of V0∪ ( ˜V \V ) by adding ˜V \V as a part to every partition in P. It is easily verified that ˜P weakly satisfies Q(k + 1)-locally. But ˜P cannot satisfy
Q for if ˜π were a partition in ˜P satisfying Q, then since Q is hereditary, ˜π\( ˜V \V ) would
be a partition in P satisfying Q, a contradiction. Therefore Q is not strongly(k +
1)-sortable. 2
Corollary 4. Strong k0-sortability implies strong k-sortability for all properties studied
in this paper whenever k0> k.
Proof: For the properties F and IF, let ˜G be obtained from G by adding a new edge (plus a new vertex) to every vertex of G. For all other properties, let ˜G be obtained from G by adding a new edge (plus a new vertex) to an arbitrary vertex of G. 2 Logically one should study the maximum k for which Q is strongly k-sortable. As a practical matter, it suffices to know if Q is strongly 2-sortable since it is easier to check the 2-local condition in most applications. It should be noted that Theorem 3 and Corollary 4 are stated in reference to the class of connected block graphs. For a subclass of connected block graphs, these results may or may not hold.
Theorem 4. DC is strongly 2-sortable.
Proof: For a partitionπ and a part A, let size(A) = |H(A)| − 1 and let size(π) denote the sum of size(A) over all A in π. Let P be a class of partitions such that P weakly satisfies DC 2-locally. Choose a π ∈ P. If π is not DC, find a π0∈ P obtained from π by DC-sorting a 2-subpartition. If π0 is still not DC, then find another π00∈ P obtained from π0 by DC-sorting a 2-subpartition. We show that at each sorting step, size(π) is
decreasing. Hence this sorting process must end, which implies that at the end we obtain a DC partition.
Let A and B be two parts which are not a DC 2-subpartition and are DC-sorted into A0 and B0. Since H(A) ∩ H(B) 6= ∅, hH(A) ∪ H(B)i is a connected graph containing A ∪ B. By Lemma 4, H(A ∪ B) = H(A) ∪ H(B). Hence
size(A ∪ B) = |H(A) ∪ H(B)| − 1. Therefore,
size(A) + size(B) = |H(A)| − 1 + |H(B)| − 1 ≥ |H(A) ∪ H(B)| + 1 − 2 = size(A ∪ B).
On the other hand, H(A0) and H(B0) are disjoint subsets of H(A0∪ B0) = H(A ∪ B). Thus size(A0) + size(B0) = |H(A0)| − 1 + |H(B0)| − 1
≤ |H(A ∪ B)| − 2 = size(A ∪ B) − 1
< size(A) + size(B). 2
Suppose that G(V, E) is a connected block graph and P is a class of partitions of V0⊆ V .
Lemma 6. If P satisfies C 2-locally, then there exists a π ∈ P and a part A ∈ π such that
A and V0\A do not penetrate each other.
Proof: We prove the lemma by induction on the size of V . Recall that CP is the set of cutpoints of G. Define CP0= CP ∩ V0.
Case 1. CP0= ∅. By Lemma 2, for every part A of a partition π ∈ P,
H(A) ∩ (V0\A) ⊆ CP0= ∅ and
H(V0\A) ∩ A ⊆ CP0= ∅.
Case 2. CP06= ∅. Choose any vertex ν ∈ V not a cutpoint and also choose a vertex u ∈ CP0
farthest away from ν. Then every component of hV \ui other than the one containing ν contains no point in CP0 (or u would not be the farthest point in CP0). Let U be the vertex-set of such a component. Without loss of generality, we will always label the part containing u (of a partitionπ) as V1= V1(π). Let ˜π = { ˜V1, . . . , ˜Vp} be a parti-tion in P such that U intersects a minimum number of parts other than ˜V1. (Note that
Suppose that U contains vertices in some ˜Vi6= ˜V1. By the 2-local condition, there exists
a partitionπ0∈ P which can be obtained from ˜π by C-sorting ˜V1 and ˜Vi into V10 and Vi0 (π0= ˜π is allowed). Since ˜π minimizes the number of parts (other than ˜V1) that intersect
U, Vi0∩ U 6= ∅. Necessarily Vi0⊂ U (or V10would penetrate Vi0). By Lemma 2, H(Vi0) ∩ (V0\Vi0) ⊆ U ∩ CP0= ∅
and
H(V0\Vi0) ∩ Vi0⊆ U ∩ CP0= ∅,
i.e., Lemma 6 is proved by taking Vi0as part A (ofπ0).
Therefore it suffices to consider the case that U∩ V0⊆ ˜V1. Define G∗= hV \Ui (which
remains a connected block graph), V∗= V \U, V0∗= V0\U and P∗= {π∗= π(V0∗) : π ∈ P, U ∩ V0⊆ V1= V1(π)},
whereπ(V0∗) denotes the restriction of π to V0∗. Note that P∗is nonempty since ˜π(V0∗) ∈ P∗. We claim that either P∗satisfies C 2-locally or there exist aπ ∈ P and an A ∈ π such that A and V0\A do not penetrate each other. Let π(V0∗) = {V1∗, . . . , Vp∗} ∈ P∗. Consider i6= j. If neither i nor j is 1, then Vi∗= Vi and Vj∗= Vj. By the 2-local condition on
P, there exists aπ0∈ P which can be obtained from π by C-sorting Vi and Vj. Hence
π0(V0∗) ∈ P∗ andπ0(V0∗) can be obtained from π(V0∗) by C-sorting V∗
i and Vj∗. If i= 1, then V1∗= V1\U and Vj∗= Vj. By the 2-local condition on P, there exists aπ0∈ P which can be obtained from π by C-sorting V1 and Vj such that V10 and Vj0 do not penetrate each other. Since u∈ V10, either Vj0⊆ U or Vj0∩ U = ∅. If V0j⊆ U, then Vj0and V0\Vj do not penetrate each other (see the argument in the preceding paragraph). If Vj0∩ U = ∅, then U∩ V0⊆ V10. Hence π0(V0∗) ∈ P∗ and π0(V0∗) can be obtained from π(V0∗) by
C-sorting V1∗and Vj∗into V10\U and Vj0which do not penetrate each other. This proves the
claim.
So we may assume that P∗ satisfies C 2-locally. Since|V∗| < |V |, Lemma 6 holds for G∗and V0∗by induction. Therefore, there exists aπ(V0∗) ∈ P∗and a part A∈ π(V0∗) such that A and V0∗\A do not penetrate each other. We can write A = Vi∗ for some i . Note that Vi∗= Vi for i6= 1. It is not difficult to see that Vi and V0\Vi do not penetrate each
other. 2
Theorem 5. C is 2-sortable.
Proof: We prove Theorem 4 by induction on|V0|. Suppose that P satisfies C 2-locally. By Lemma 6 the set PA= {π ∈ P : A ∈ π, A 9 V0\A, V0\A 9 A} is not empty for some
A. Define PA∗= {π∗= π(V0\A) : π ∈ PA}. Then PA∗ satisfies C 2-locally. By induction
there exists a C partitionπ0(in PA∗) of V0\A. Then π = π0∪ A is a C partition in P. 2 Unlike consecutiveness, we have only negative results on the sortability of nestedness.
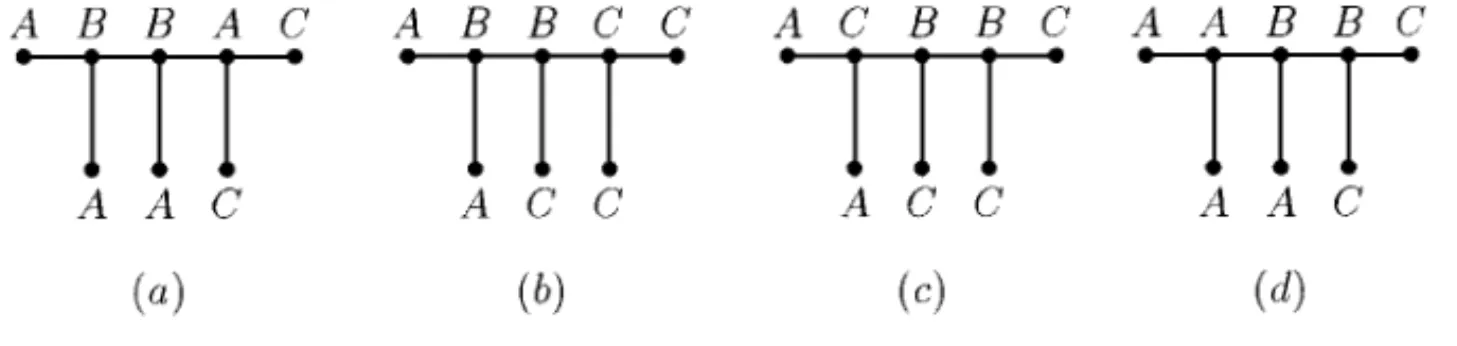
We show that I is not strongly 2-sortable by giving a tree T and a class P of partitions which weakly satisfies I 2-locally, but does not contain a I partition. Let P consist of the following four partitions (a vertex is labeled by the part it belongs):
Figure 6. A class of 4 partitions.
In Figure 6(a), A and C are not I , but figure 6(b) gives a partition obtained by I -sorting A and C. Similarly, partition 6(c) (6(d), 6(a)) is obtained from partition 6(b) (6(c), 6(d)) by
I -sorting B and C ( A and C, A and B). So P weakly satisfies I 2-locally, but none of the
partitions in P is I . This is also an example against DI being strongly 2-sortable.
Note that figure 6 does not give an example against 2-sortability. Partition 6(b) has two non-I pairs,(A, B) and (B, C). But P does not contain a partition obtainable from partition 6(b) by I -sorting A and B. Hence, P does not satisfy I 2-locally.
It has been shown (Hwang et al., 1996) that IF(F) is not 2-sortable for the path. Hence, it is not 2-sortable for the connected block graph in general. Furthermore, since k-sortability implies k-consistency, DO, O, DN and N are not k-sortable for any k > 1.
5. Conclusion
We summarize what is known about consistency and sortability for the connected block graph in Table 1. The entries give the minimum k for which the property in the column is k-consistent or k-sortable, and answer yes (Y) or no (N) to strong 2-sortability.
Table 1. A summary on the connected block graph.
IF DC DIO C F DI IO DT I DO T DN O N D TO DTO
Consistency 2 2 4 2 3 2 4 3 2 ∞ 3 ∞ ∞ ∞ 2 4 4
Sortability >2 2 >3 2 >2 >3 >2 ∞ >2 ∞ ∞ ∞ >3 >3
Strong 2-sort N Y N N N N N N N N N N N N N
Acknowledgment
G.J. Chang was supported partially by the National Science Council of the Republic of China under grant NSC82-0208-M009-050 and partially by DIMACS, Rutgers University.
References
1. F. Harary, Graph Theory, Addison-Wesley: Reading, MA, 1972.
2. F.K. Hwang and G.J. Chang, “Enumerating consecutive and nested graph partitions,” Europ. J. Combin., vol. 1, pp. 63–40, 1998.
3. F.K. Hwang, U.G. Rothblum, and Y.C. Yao, “Localizing combinatorial properties of partitions,” Disc. Math., vol. 160, pp. 1–23, 1996.