再入射雙鏡式非共平面環形共振腔的理論分析
129
0
0
全文
(2) 感 謝 詞 也許這是我要說幾句感謝話的時候了。活了這麼大的歲數,完成 一篇博士論文,這是我的人生旅途中一個很難得的體驗。---只要開 始,就不算是遲---這句話是我在大學時就一直記得的格言,而它卻 陪我走過不知多少的歲月。我深深覺得,要完成一個研究工作,除了 自己本身要有很強的求知欲念之外,還必須具有三項很重要的因素, 首先是要有良師的指引,其次是要有良好的學習與研究環境,再其次 是要有好的同學及朋友互相協助,如果具足這些條件,那麼順利完成 研究工作是可以預期的。今天,在完成這篇研究論文的時候,我首先 必須感謝的是鄭木海院長,由於他的引進,我才能在這個研究環境中 學習,飲水思源,這是我要時常心懷感念的。其次,良師的指引,我 的指導教授黃升龍老師就具足這個條件,黃老師不論是學識或為人均 值得令人敬佩與效法。再其次要感謝的是本所中所有的老師與同學, 特別是參與本論文研究的一些同學:黃碧玲、翁俊仁、陳穎慧、黃善 瑜、裴善莊、易瑞勻,本篇論文中的一些實驗數據都是他們辛辛苦苦 做出來的成果。末了,僅以蘇東波的一首詩之片段描述內心的感受: 人生到處如何似,應似飛鴻落爪泥,….
(3) 簡. 歷. 個人資料 姓名 :段宏昌(男) 出生 :民國 38 年次(現年 56 歲) 籍貫 :湖南省益陽縣. 學歷 高中 :省立嘉義中學 大學 :私立淡江大學物理系 碩士 :私立淡江大學物理研究所 博士 :國立中山大學光電研究所. 經歷 預官 25 期,任職於中正預校教官 國立高雄工專(國立高雄應用科技大學)物理組. 興趣 自然科學哲學、中醫學、佛學(法相唯識)、太極拳劍.
(4) 中文摘要. 本研究論文是用高斯光束的行進傳輸方式,針對由兩個曲率半徑相 同的球面鏡所組成的(Herriott-type multi-pass cell)共振腔,所做的理論分 析。由於此非共平面共振腔是一種非正交且非近軸的共振腔,無法用 ABCD 矩陣的方法來分析,嚴格的分析方法應該考慮高斯光束的行進傳 輸方式。今由考慮到高斯光束由於斜角入射的像散性與球面像差以及光 束每經一次鏡面反射後須做一個座標變換。當光束在共振腔中走完一整 圈時,必須滿足自我協調的條件之下,得到此共振腔的精確解。於其中 可發現球面像差的修正是一個很重要的一項,因為如果沒有考慮到此項 修正,那麼共振腔是無法得到一個穩定的解。. 再入射環形共振腔對於腔長是很敏感的,特別的是當共平面與非共 平面的結構具有相同的輸出光點時,因此,精確的分析此共振腔內雷射 光束的傳輸極為重要。當考慮到光束經過一次鏡子的反射時需做一次座 標變換,由此可發現非共平面立體 8 字形環形共振腔是可以用類似正交 共振腔的做法來分析。以簡單像散性高斯光束的形式在共振腔內行進, 可用來分析此非共平面立體 8 字形環形共振腔,由此並可獲得一個精確 的解析解。對於一般情況再入射環形共振腔,則可由設計一個以一般像 散性高斯光束在共振腔內行進的程式,來分析此問題。經鏡子反射所產 生的相位移動亦使用較為廣泛的形式,由此可得到兩項主要的差別,不 同於用 ABCD 矩陣的做法。其一為腔內光點的形狀一般而言是橢圓形 狀,而不一定是圓形,其二為共振腔會產生第二穩定區,其帶寬相較於 第一穩定區為窄。. I.
(5) Abstract. In this dissertation a rigorous analysis is performed on the reentrant non-planar ring laser cavity constructed by the Herriott-type multi-pass cell. Since the non-planar ring cavity is a non-orthogonal cavity, so the ABCD matrix method used to analyze the beam propagation is not valid. A rigorous method using Gaussian beam propagation is needed. The beam rotation, astigmatism, and spherical aberration are considered to obtain a self-consistent solution of the Gaussian beam. It turns out that spherical aberration is a very important issue for this non-planar resonator. Without taking into account the spherical aberration, a stable resonator would be difficult to realize. By using a self-consistent Gaussian beam propagation method, the characteristic of laser beam was analyzed and compared with that of the ABCD approximation method.. The reentrant ring cavity is very sensitive to cavity length, especially when the planar and non-planar configurations have the same output beams; therefore, it is very important to consider a rigorous method using Gaussian beam propagation. By considering the coordinate transformation of the beam after mirror reflection, a non-planar figure-8 ring cavity can be treated as an orthogonal cavity except for an exchange of tangential and Sagittal planes after each reflection. A simple astigmatic Gaussian beam approach is used to analyze the non-planar figure-8 ring cavity, and an analytic solution is obtained. For the general case of the multi-pass non-planar ring cavity, a general astigmatic Gaussian beam approach is used to treat the problem. The general form of mirror phase shift is used, and two important differences compared to the ABCD method were found. Firstly, the spot size is always elliptical while the spot size is circular using the ABCD approximation. Secondly, a second stable region is found in the cavity, the width of the second stable region is smaller than the first stable region.. II.
(6) 目錄 中文摘要. Ι. 英文摘要. II. 目錄. III. 圖目錄. V. 表目錄. IX 緒論 1.1 前言. 1 1. 1.2 研究動機. 3. 1.3 本研究論文的貢獻. 5. 1.4 本研究論文的架構. 7. 第二章. 環形共振腔的介紹 2.1 文獻回顧 2.2 環形共振腔的優點 2.3 環形共振腔的應用 2.4 環形共振腔的設計. 8 8 12 14 16. 第三章. 再入射環形共振腔的腔長公式與近似解 3.1 再入射環形共振腔的腔長公式 3.2 再入射環形共振腔的近似解 3.3 再入射環形共振腔近似解的穩定性分析. 19 19 26 33. 第四章. 立體 8 字形再入射環形共振腔的分析 4.1 非共平面雷射光束的轉動 4.2 像散性以及球面像差 4.3 格林(J. M. Greene)殘數方法 4.4 立體 8 字形再入射環形共振腔的解析解 4.5 立體 8 字形再入射環形共振腔的穩定度分析 4.6 增益介質側移量趨近於零的情況. 39 39 48 50 56 63 69. 第五章. 一般情況的再入射環形共振腔的分析 5.1 再入射環形共振腔的分析觀點 5.2 再入射環形共振腔的一般情形. 71 71 72. 第一章. III.
(7) 第六章. 再入射環形共振腔的實驗與分析 6.1 再入射環形共振腔四能階紅外光雷射 6.2 再入射環形共振腔綠光雷射 6.3 再入射環形共振腔的腔長驗證 6.4 再入射環形共振腔準三能階紅外光雷射. 85 85 88 91 94. 第七章. 結論. 95. 附錄 A 附錄 B. 再入射環形共振腔雷射光束轉動角度的證明 LG 0l 模態腔長的證明 共振腔的模擬程式. 附錄 C. 97 100 103. 參考文獻. 109. 中英文對照表. 115. IV.
(8) 圖目錄. 第一章 圖 1.1 描述再入射環形共振腔中的雷射光束之一立體圖例 圖 1.2 三角形路徑之三視圖及輸出光點 圖 1.3. 共平面“8”字環形之三視圖及輸出光點. 圖 1.4. 非共平面立體“8”字環形之三視圖及輸出光點. 第二章 圖 2.1 單一晶體經由切割形成的環形共振腔 圖 2.2 三面鏡子組成的環形共振腔 圖 2.3 四面鏡子組成的環形共振腔 圖 2.4. 立體 8 字形環形共振腔. 圖 2.5. 立體 8 字形環形共振腔 (a)俯視圖 (b)側視圖 (c)端視圖. 圖 2.6. 綠光問題:綠光之振幅擺動. 圖 2.7. 微量檢測系統架構圖. 圖 2.8 N=9 , M=4 的側視圖 圖 2.9. 再入射之雙鏡式環形共振腔雷射之系統架構. 第三章 圖 3.1. 雙鏡式雙鏡式環形共振腔之立體圖. 圖 3.2 N=2 , M=1 的端視圖 圖 3.3 d/R 與 L/R 對於 M/N 從 0.1 到 0.9 的關係 圖 3.4. 兩個曲率半徑分別為 R1 及R2,腔長為 L 的共振腔. 圖 3.5. 平面 8 字環形共振腔的穩定度分析圖 V.
(9) 圖 3.6 N=3 , M=1 的空腔側視圖 圖 3.7. 固定輸出點數 N=5 其 d/R 與空腔穩定度的關係圖. 圖 3.8. 固定雷射光在腔內迴圈數 M=1 其 d/R 與空腔穩定度關係. 圖 3.9. 固定輸出點數 N=5 其 d/R 與空腔光腰尺寸的關係圖. 圖 3.10 固定輸出點數 M=1 其 d/R 與空腔光腰尺寸的關係圖 圖 3.11 固定輸出點數 N=5 其 d/R 與 1-q 的關係圖 圖 3.12 固定雷射光在腔內的迴圈數 M=1 其 d/R 與 1-q 的關係圖 第四章 圖 4.1 立體 8 字環形共振腔的光線圖 圖 4.2. 在共振腔中行進一整圈的雷射光束行進情形的等值描述, (a)圖為近軸但非正交方式, (b)圖為非近軸但正交方式. 圖 4.3 由凹面鏡所形成的斜角入射之影像 圖 4.4 入射線入射於球面鏡上 T 點 , 反射之後通過軸上 Q 點 圖 4.5 描述穩定性的兩種方法之比較,深藍色曲線代表由 ABC 矩陣理論推導所得,紅色的點為跟據電腦模擬計算的結果 圖 4.6. 高斯光束的瞄述 (a) 簡單像散性高斯光束, (b) 一般像散. 性高斯光束 圖 4.7 近似解與解析解的光腰尺寸大小之比較 圖 4.8 近似解與解析解的曲率半徑之比較 圖 4.9. 空腔時在 z=0 處,近似解與解析解的光腰尺寸大小之比較. 圖 4.10 解析解在 z=0 處的曲率半徑隨 d/R 而變化的情形 圖 4.11 (N,M)=(2,1) 情況穩定度的描述 (a) 解析解在空腔時的 穩定度, (b) 由殘數所顯示的的穩定度 圖 4.12 立體 8 字環形共振腔中不同增益介質的厚度對穩定度響, (a)圖為精確解 ,(b) 圖為近似解 VI.
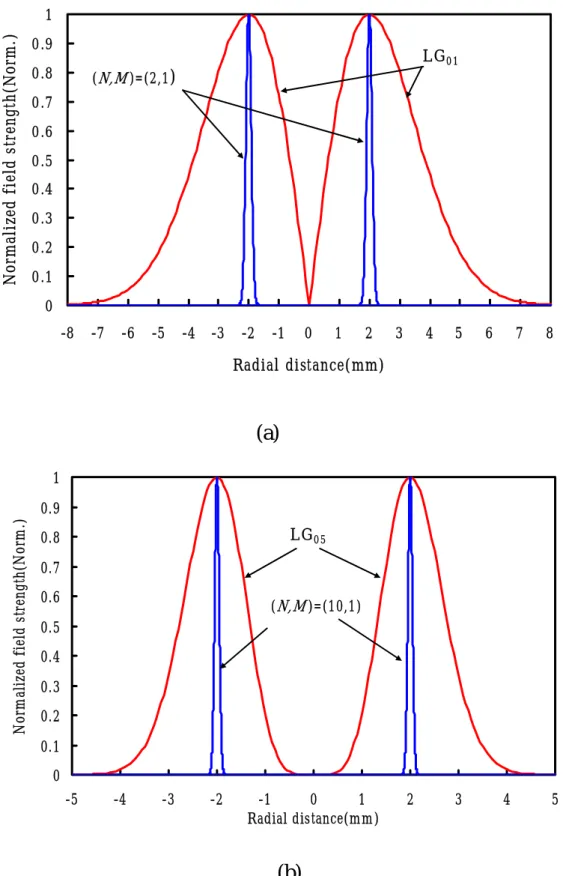
(10) 圖 4.13 比較近似解與精確解在加入幾個不同的有效厚度為teff 增益介質時,側移量最少為多大時,會達到穩定 圖 4.14 精確解與近似解整個雷射光束的光腰尺寸的大小之比較 第五章 圖 5.1 (N,M)=(7,5)的 (a)光腰尺寸大小 (b) 曲率半徑 隨側移量的增加而變化的曲線 圖 5.2 (N,M)=(7,5) (a) x-方向(b) y-方向隨側移量 的增加而變化的殘數曲線 圖 5.3 x 方向與 y 方向光腰尺寸大小的比值隨 M N 而變化的情形 圖 5.4. 各種不同的 M 與 N 值的再入射環形共振腔中其臨界值 隨 M N 而變化的情形。(a) 為 x-方向 (b) 為 y-方向. 圖 5.5. 討論 N = 5 的情況,(a),(b),(c),(d) 分別為 M = 1,2,3,4 的情 況,藍色曲線為 x 方向的光腰尺寸,紅色曲線為為 y 方 向的光腰尺寸,綠色曲線為近似解. 圖 5.6. M = 1 的情況時,近似解光腰尺寸隨增益介質的側移量. 而變化的曲線 圖 5.7. M = 1 的情況時,精確解光腰尺寸隨增益介質的側移量. 而變化的曲線。藍色曲線為 x 方向的光腰尺寸,紅色 曲線為為 y 方向的光腰尺寸,綠色曲線為近似解 圖 5.8. LGpl 模態與再入射環形共振腔的腔長之比較. 圖 5.9. 在 d=2mm, z=0 處 LGpl 模態與再入射環形共振腔 的場模之比較。(a)圖為 LG01 mode 與(N,M)=(2,1)的比較, (b)圖為 LG05 mode 與(N,M)=(10,1)的比較. VII.
(11) 第六章 圖 6.1. 雙鏡式立體 8 字環形共振腔單縱模紅外光雷射之架構. 圖 6.2. 雙鏡式立體 8 字環形共振腔 1064nm 之 LI-curve. 圖6.3. 雷射在單縱模機制下,法彼-珀羅干涉儀所量測之結果. 圖6.4. 雙鏡式環形共振腔雷射系統之橫模拍照圖. 圖 6.5. 使用 Nd:YAG 之環形共振腔,在不同長度 KTP 之綠光效率比較. 圖 6.6. 使用Nd:YVO4之環形共振腔,在不同長度 KTP 之綠光效率比較. 圖 6.7. 雙鏡式立體 8 字環形共振腔單縱模綠光雷射之架構. 圖 6.8. 不同幫浦電流下單縱模綠光雷射之振幅雜訊. 圖 6.9. 綠光之橫模拍照圖. 圖 6.10 N=3 , M=1 的腔長可容許變動之量測 圖 6.11. N=7 , M=3 的腔長可容許變動之量測. 圖 6.12 (N,M)=(2,1),(7,4),(9,5)的橫模拍照圖. 附錄 A 圖 A.1. 再入射雙鏡式環形共振腔雷射之系統架構. 圖 A.2. 由前面四個光點的位置所描述的轉動. VIII.
(12) 表目錄 第二章 表 2-1. 雷射二極體規格表. 第三章 表 3-1. 模擬腔長與實驗腔長的比較表. 表 3-2. N=5 , M=1、2、3、4. 表 3-3. M=3 , N=4、5、7、8. 第四章 表 4-1. 立體 8 字環形共振腔四個入射面的座標. 第六章 表 6-1. 增益介質的最小側移之模擬值與實驗值的對照表. IX.
(13) 第 一 章 緒. 論. 本章主要介紹本論文的研究背景與動機,論文的貢獻與架構。. 1.1 前言. 再入射之雙鏡式環形共振腔雷射,是由兩個曲率半徑相同的球面鏡 所組成的(Herriott-type multi-pass cell)共振腔,[1-3]它是一種體積小、元件 少、無散光像差的雷射共振腔,此環形共振腔可用於航空、微量檢測、 鎖模雷射以及有效產生單縱模的近紅外光及藍、綠光雷射,其中單縱模 藍、綠光雷射也可應用於生化與醫療科技、水下探測、資料儲存、全像 術等。[4-11] 由於固態雷射晶體,傳統上吸收係數很低,且吸收頻寬窄, 在閃光燈幫浦下,增益介質的長度必須夠長以使幫浦效率得以提升,對 於需要高對稱性的環形共振腔而言,如此長度的增益介質在共振腔中容 易造成雷射光路徑的嚴重扭曲,因而破壞了雷射光路徑在共振腔中的對 稱性,所以不易利用雙鏡式做出立體環形共振腔。以半導體雷射幫浦固 態雷射,不僅解決了傳統閃光燈幫浦效率不高的問題,而且可以有效的 縮短增益介質的長度,使整個系統體積縮小,並可得到較高峰值的功 率,相較於半導體雷射而言,也使得輸出雷射之縱模及橫模的品質得以 提升。 一般的環形共振腔至少需要三片面鏡,[9-11]我們的環形共振腔是利 用兩片球面鏡及一個增益介質組成,並利用共振腔的再入射性質,成功 的做出不同的雷射輸出點數N,及腔內迴圈數M的雷射系統。再入射共 振腔的意思是指,雷射光在共振腔中經過了一整圈時,若在共振腔經過 了 2N次的反射,則第 2N+1 個輸出光點將與第一個輸出光點重合。對於 此再入射之雙鏡式環形共振腔,為了瞭解雷射光在共振腔的路徑及一些 1.
(14) 光學特性,由使用一些基本的光學原理,可推導出腔長與增益介質側移 的關係式,得到一個精確的腔長公式,並由實驗加以驗證,發現實驗腔 長與經由理論推導出的腔長公式相當吻合。[12 ]. M1. M2. 圖 1.1. 描述再入射環形共振腔中的雷射光束之一立體圖例。. 對於此再入射環形共振腔,雷射光在共振腔中經過了一整圈時,光 線係經由兩個球面鏡做多次的反射,圖 1.1 為描述此再入射環形共振腔 中的雷射光束之一立體圖例。此環形共振腔是一種非共平面(non-planar) 且 非近軸 (non-paraxial)的共振腔。對於環形共振腔的再入射條件,A. Yariv 與 R. Kompfner 等人利用近軸近似的方法來分析,[13,14]求得環形共 振腔的再入射條件其實是不符合實際的環形共振腔,因為非共平面環形 共振腔是一種非正交(non-orthogonal)且非近軸的共振腔,所以無法利用 近軸近似的方法分析雷射光在腔內的行為。又由於非共平面環形共振腔 是一種非正交的共振腔,因此, 2 × 2 ABCD 光線傳輸矩陣的分析方法 2.
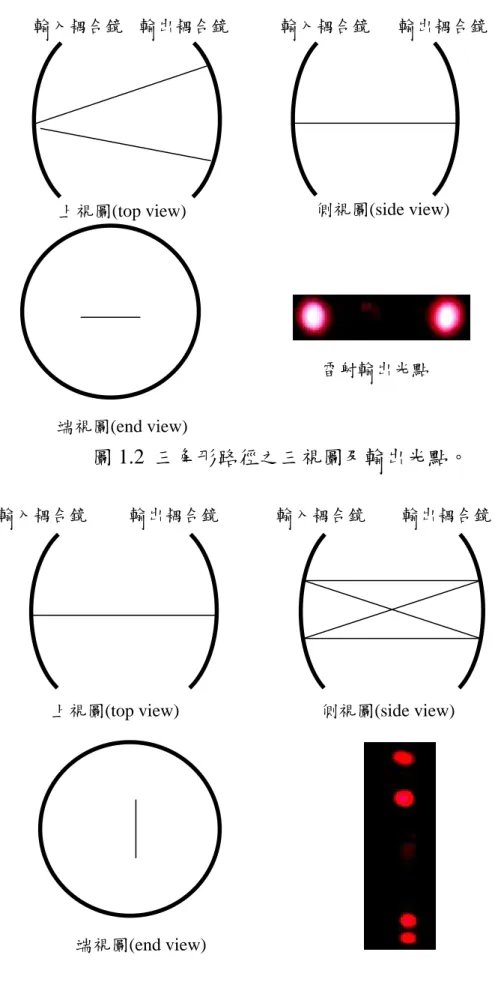
(15) 只能算是一種近似的做法。嚴格的分析方法應該考慮高斯光束在非共平. 面環形共振腔中行進的傳輸方式。這兩種方法在本篇論文中我們均會詳 細談到,並加以比較。. 1.2 研究動機. 再入射環形共振腔對於腔長是很敏感的,只要調整腔長就可產生各 種不同情況的再入射環形共振腔。有關腔長公式將在下面的章節中詳細 介紹,現在茲以一個例子說明。茲考慮立體 8 字形環形共振腔,若鏡子 的曲率半徑為 80 mm,在增益介質的側移量為 3mm 的情況下,其腔長 為 80.06mm,這是非共平面立體 8 字形環形共振腔。但是如果稍微調整 一下腔長,改變為正好 80mm(腔長等於曲率半徑),則腔內雷射光束的 行進路徑變為三角形,若再稍微縮短腔長為 79.94mm,那麼共振腔就會 變為共平面 (planar)環形共振腔。圖 1.2,圖 1.3 與圖 1.4 分別為描述此 三種變化的情形,圖 1.2 為三角形,圖 1.3 為共平面 8 字形,圖 1.4 為非. 共平面立體 8 字形。其它的一般情況再入射環形共振腔(亦即 N >2 的情 況),都會有這個問題,亦即非共平面環形共振腔與共平面環形共振腔, 兩者腔長的差異很小,所以,精確的分析此共振腔內雷射光束的傳輸極 為重要。然而,非共平面環形共振腔是一種非正交且非近軸的共振腔, 無法利用近軸近似的方法分析雷射光束在腔內的行為,若用 ABCD 矩陣 的方法來分析,只能算是一種近似的做法。嚴格的分析方法應該考慮高 斯光束在非共平面環形共振腔中行進的傳輸方法,這種分析方法才是一 種精確的做法。由於非共平面環形共振腔對於腔長是很敏感的,因此, 考慮到用精確的做法去清楚的瞭解整個非共平面環形共振腔,是我們所 關心的關鍵所在,這就是本研究論文的研究動機。. 3.
(16) 輸入耦合鏡 輸出耦合鏡. 輸入耦合鏡. 輸出耦合鏡. 側視圖(side view). 上視圖(top view). 雷射輸出光點 端視圖(end view). 圖 1.2 三角形路徑之三視圖及輸出光點。 輸入耦合鏡. 輸出耦合鏡. 輸入耦合鏡. 上視圖(top view). 輸出耦合鏡. 側視圖(side view). 端視圖(end view). 圖 1.3 共平面“8”字環形之三視圖及輸出光點。. 4.
(17) 輸入耦合鏡. 輸出耦合鏡. 輸入耦合鏡. 輸出耦合鏡. 側視圖(side view). 上視圖(top view). 端視圖(end view). 圖 1.4 非共平面立體“8”字環形之三視圖及輸出光點。. 1.3 本研究論文的貢獻. 由於考慮到用高斯光束在共振腔中行進的傳輸這種精確的做法,可 以發現許多近似解的做法所無法得到的一些重要的現象。現在歸納一下 本研究論文所做的幾點貢獻如下:. [1] 本論文是用一般像散性高斯光束(general astigmatic Gaussian beam) 在共振腔中行進的傳輸方式來探討非共平面環形共振腔的問題,就 我們所知,這是第一次用這種方法來分析非共平面環形共振腔。. 5.
(18) [2] 非共平面環形共振腔一般而言是非正交的共振腔,在考慮到座標系 統的旋轉變換時,可發現對於立體 8 字形環形共振腔,高斯光束在 共振腔中每經過一次鏡子反射時,其描述光束的座標系統正好對共 振 腔 的 光 軸 旋 轉 90 度 。 在 這 種 情 況 下 它 是 可 以 用 類 似 正 交 (orthogonal)共振腔的做法來分析。其次,對於一般情況再入射環形 共振腔,則可發現高斯光束在共振腔中每經過一次鏡子反射時,其 ⎛ Mπ ⎞ ⎟ 的角度。 ⎝ 2N ⎠. 描述光束的座標系統是對共振腔的光軸旋轉 π − 2⎜. [3] 如前所示,此非共平面環形共振腔對於腔長是很敏感的,若不考慮 輸入及輸出耦合透鏡上由於斜角入射所產生的像散性(astigmatism) 以及球面像差(spherical aberration),共振腔是無法得到穩定的解。因 此,本論文有針對共振腔的正切平面(tangential plane)與弧矢平面 (Sagittal plane)分別做曲率半徑之球面像差修正。. [4] 在考慮以高斯光束在共振腔中行進的傳輸方式來描述非共平面環形 共振腔,並考慮到斜角入射所產生的像散性與球面像差,以及描述 光束的座標系統的座標變換之下,對於立體 8 字形環形共振腔可得 到一個精確的解析解,並由此得知描述其穩定度的方法。. [5] 對於一般情況再入射環形共振腔,由於它的非正交性,因此,很難 如同立體 8 字形環形共振腔那樣得到一個精確的解析解,但是,可 以設計一個以一般像散性高斯光束在共振腔內行進的方法,來分析 此問題。由此可以得到兩項主要不同於用 ABCD 矩陣近似解的做法. 6.
(19) 所描述的現象。其一為腔內光點的形狀一般而言是橢圓形狀,不一 定是圓形,其二為共振腔會產生第二穩定區,其帶寬相較於第一穩 定區為窄。 1.4 本研究論文的架構 本論文的架構是由下面各章節中,分開討論再入射非共平面雙鏡式 環形共振腔的整個情況,包括近似解與精確解並比較兩者的差異。第二 章中首先從文獻的回顧出發,並針對再入射非共平面環形共振腔的設計 以及應用加以討論。第三章中介紹再入射 非共平面 環形共振腔的近似 解。第四章中介紹立體 8 字形再入射非共平面環形共振腔的精確解,並 比較近似解與精確解兩者的差異 , 第五章中將考慮到各種不同情況的 再入射非共平面環形共振腔做分析,第六章介紹再入射非共平面環形共 振腔的實驗結果。. 7.
(20) 第 二 章. 環形共振腔的介紹. 本章主要介紹環形共振腔的概況,包括非共平面環形共振腔的文獻 回顧,環形共振腔的優點及應用,以及我們所用的環形共振腔的設計。. 2.1 文獻回顧. 一般的環形共振腔是由三片或四片鏡片組成,例如 1985 年,由 T. J. Kane 及 R. L. Byer 等人,採用單一晶體經由切割成特殊的多角形,使得 光在晶體內以不共平面的環狀方式行進的單晶體環形共振腔(monolithic ring laser) ,如圖 2.1 所示。[9]或是在 1991 年,由 J. L. Nightingale 及 P. Valley 等人,利用二面耦合透鏡和一晶體切面所組成的三鏡式環形共振. 腔 (three-mirror ring laser),如圖 2.2 所示。[10]以及在 1995 年,由美國 Coherent 公司的工程師 M. D. Selker 及 T. J. Johnston 等人,發展出來的 四鏡式環形共振腔(four-mirror ring laser) 如圖 2.3 所示。[11]. 圖 2.1. 單一晶體經由切割形成的環形共振腔. 8.
(21) 圖 2.2. 三面鏡子組成的環形共振腔. 圖 2.3. 四面鏡子組成的環形共振腔. 光在傳統由三面或四面鏡片所組成的環形共振腔內是以共平面的 8 字形或是三角形方式行進,相較一般線型共振腔,環形共振腔的光學元 件較多、體積較大、設計較複雜。直到立體 8 字形環形共振腔的發現, 打破了傳統雷射環形共振腔至少必須使用三片面鏡的設計。立體 8 字形 的共振腔是由二片面鏡及一個增益介質組成,如圖 2.4 所示。[15]. 9.
(22) 輸入耦合鏡. Nd:YAG. 輸出耦合鏡. 雷射輸出 圖 2.4 立體 8 字形環形共振腔。. 圖 2.5(a)及圖 2.5(b)是立體 8 字形環形共振腔的俯視圖及側視圖,由 圖可知,光的路徑是呈現 8 字形的結構,而由端視圖來看,光的路徑則 是一個正方形的路徑結構。顯示腔內光的路徑是一立體而非共平面的 8 字形結構。. (a). (b). (c). 圖 2.5. 立體 8 字形環形共振腔。(a)俯視圖 (b)側視圖 (c)端視圖。. 10.
(23) 此雙鏡式 8 字形環形共振腔的設計較傳統的環形共振腔體積小、元 件少、設計簡單,下面將會介紹此環形共振腔系統。本篇論文主要是討 論非共平面環形共振腔的理論分析,在此首先簡單的回顧一下關於前人 所做的有關非共平面環形共振腔理論方面的研究。在理論方面就我們所 知, J. A. Arnaud 是最早提出非共平面環形共振腔的原理與應用者。[16-18] J. A. Arnaud 等人已經證明,要分析 非共平面 環形共振腔需要用到比 2 × 2 光線矩陣更為複雜的 4 × 4 光線矩陣,而一般的 4 × 4 光線矩陣具. 有十個獨立的元素。[18,19] A. E. Siegman 指出,對於正交光學系統是可 以用 4 × 4 對角線光線矩陣來處理環形共振腔的問題,但是對於非正交 光學系統則 4 × 4 光線矩陣無法處理。較為早期的非共平面環形共振腔 的研究論文有 Danileiko, Lobachev, Popov 與 Arnaud 等人。[20-22] 對 非共平面 環形共振腔的 影像旋轉 ( image rotation)方面的研究 , 產生了極有用的不穩定環形共振腔,一般稱為 “ UR90 “共振腔。此部分 的研究列於參考資料中。[23-25] 又由採用單一晶體經由切割成特殊的多 角形,使得光在晶體內以不共平面的環狀方式行進的 “單晶非共平面環. 形共振腔” [MPRO],可以產生單一方向的行進波而消除空間燒孔效應 (spatial hole burning)。[26] 最早將非共平面環形共振腔應用於雷射陀螺儀 的是 G. B. Jacobs 。 他的 CO2 雷射陀螺儀是利用六面鏡子排列在兩個 平面上形成一個各向同性 (isotropic) 的共振腔。 [27,28] 其他類似的研究 有Sanders and Anderson, [29] Smyshlyaev et al., [ 30 ] , Golyaev et al., [ 31 ] 以 及 Nanii and Shelaev。[32] 11.
(24) 非共平面環形共振腔模態的性質首先由 J. A. Arnaud 提出。[33] 1989 年 Nilsson 等人以瓊斯矩陣 (Jones matrix) 的理論為基礎對非共平面環 形共振腔做較為詳細的分析,並從其觀點提供了一個設計上的原理。[34] 1991 年 A. D. Stokes 等人以光線追跡 (ray tracing) 的方法提供了一個 獲得共振腔穩定性的簡單方法。[35] 一般 3× 3 光線矩陣的傳輸方法可以 用來分析沒有排成直線的光學系統。[36 ] 也有一些論文提到解非近軸光 學系統的問題,[37-41] 其中像 slip-step non-paraxial(SSNP) method,[37]又 如 transfer-matrix method,[41] 無論如何他們都只是處理某個光學元件的 問題而不是整個共振腔系統的問題。對於非共平面環形共振腔模態穩定 性的研究,用 3× 3 矩陣或 4 × 4 矩陣都還沒有適當的理論。本篇論文 是首次用嚴格的高斯光束傳輸方式來研究非共平面環形共振腔。. 2.2. 環形共振腔的優點. 半導體雷射幫浦之固態雷射,具有半導體雷射輕、薄、短、小的特 性,及固態雷射的高品質輸出模態[42]。使用縱向激發型固態雷射比起其 他激發方式,其光對光的轉換效率較高又較易達成模態匹配,且腔內的 功率密度高於腔外的功率,可以使用腔內倍頻技術來達成藍、綠光的輸 出;然而此種腔內倍頻技術面臨嚴重的"綠光問題"(green problem),[43-45] 造成雷射光輸出的不穩定,無法提供純度極高的雷射光,大大影響其應 用範圍;解決此問題的方法之一是使雷射在單縱模情況下操作,消除雷 射增益晶體上之空間燒孔效應,使得和頻(sum frequency)效果無法在倍 頻晶體內產生,而以穩定的單縱模雷射光輸出。[46-49]. 12.
(25) 光在一般的線型共振腔內,是以駐波的形式存在,這些駐波對雷射 晶體的增益,會造成不均勻的空間燒孔效應,使輸出雷射操作在多縱模 之機制下。藉由單方向控制之環形共振腔,是目前產生單縱模雷射的主 要方法[50];藉由單方向之控制,使得在環形共振腔內以行進波的形式存 在,雷射即操作在單縱模雷射之輸出機制下。在一般的線形雷射共振腔 內,通常存在許多的縱向振盪模態,當在腔內加入 KTP 晶體時,可能 將這些不同的縱模同時加以耦合,產生和頻效果,造成綠光輸出的不穩 定,甚至造成輸出光功率會有很大的振幅擾動,如圖 2.6 所示,這就是 所謂的"綠光問題"。. 圖 2.6 綠光問題:綠光之振幅擾動。. 綠光問題嚴重影響腔內倍頻綠光雷射的發展,所以一直以來大家都 在尋求良好的穩定方法加以解決;而其中較為常用的方法不外乎是使雷 射操作在單縱模機制下,當雷射操作在單縱模機制下時,將不會在倍頻 晶體內產生 和頻 效果,使 綠光問題 消除,因而產生穩定的綠光雷射輸 13.
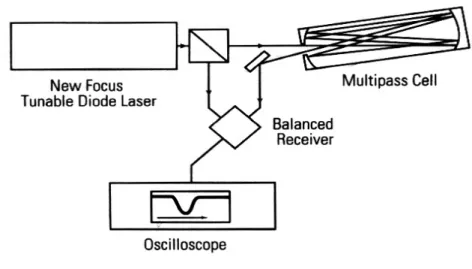
(26) 出。使雷射達到單縱模操作通常使用以下幾種方法: (1)在腔內加入選頻. 元件(etalon),[51] (2)在腔內加入布魯斯特平面(Bruster plate),[52] (3)在腔 內加入四分之一波長的波片(quarter-wave plate),[53] (4)設計非常短的共 振腔,[54] (5) 設計環形共振腔,[1-3]把雷射共振腔設計為環狀,並在腔內 加入法拉第旋轉元件(Faraday rotator),將使得光沿著單一方向前進,而 消除駐波所造成的空間燒孔效應,使雷射操作在單縱模機制下。我們發 現傳統的穩定方法存在許多缺點,譬如在腔內加入選頻元件、布魯斯特 平面元件、四分之一波長的波片,將影響固態綠光雷射有效縮小體積, 增加系統成本,且大幅降低綠光輸出功率;目前,設計非常短的共振腔, 藉由單方向控制之環形共振腔成為產生單縱模雷射的主要方法。 2.3 環形共振腔的應用. 我們採用兩片球面鏡實現再入射雷射的技術,此環型共振腔較傳統 環形共振腔更符合簡化、輕巧的時代潮流。且可用於有效產生單縱模的 近紅外光及藍、綠光雷射。因為利用環形共振腔取代線形共振腔,可避 免線形共振腔因駐波所造成的 空間燒孔 效應,因而避免所謂的 綠光問. 題。對於再入射之雙鏡式環形共振腔雷射系統,可以作為微量的檢測, 目前商業上的微量檢測系統,大部分是利用所謂的 multipass cell,[55-58] 如圖 2.7 所示,其長度大約從 36 公尺到 100 公尺,其原理是將一個可調 波長的 LD 打入 multipass cell 中,雷射光在 multipass cell 中經由多次反 射之後,將由接收器接收其輸出強度,並利用 I = I 0 e −αl 推算出氣體的α 值,進而可知微量氣體的含量。. 14.
(27) 圖 2.7 微量檢測系統架構圖。. 再入射之雙鏡式環形共振腔雷射系統適合作為微量檢測系統,以我 們所使用的實驗架構來說,輸出及輸入鏡皆是對 1064nm 反射率 99.8% 的鍍膜,所以光在共振腔往返一次,約損失 0.4%的能量,所以一旦有 微量氣體進入共振腔中,則會造成共振腔中的損失增加,因而會很靈敏 的反應在輸出的功率中。另外利用此環型共振腔再入射的特性,可以嘗 試製作皮秒(pico-second)量級的小型固態鎖模雷射。傳統的鎖模雷射當 工作在 100MHz 量級的頻率時,其腔長需要約 1 公尺,但利用此再入射 環形共振腔如圖 2.8 所示,則只需約 10 公分即可,大幅縮小了鎖模雷射 的體積。. 圖 2.8 N=9 , M=4 的側視圖。. 15.
(28) 2.4. 環形共振腔的設計. 圖 2.9 所示為再入射之雙鏡式環形共振腔雷射的系統架構,使用兩 面耦合透鏡組成一個立體環形共振腔,及一個雙凸透鏡與輸入端的耦合 透鏡組成一透鏡組,將半導體雷射光聚焦,而聚焦後的激發光源自距離 共振腔中心水平軸d0 處,且平行於鏡軸方向進入共振腔內激發增益介 質,適當的調整增益介質的傾斜角及共振腔的腔長,則經由增益介質所 釋放出來的基頻雷射光將於此環形共振腔內依循適當的光路徑來回振 盪放大。系統中包括雷射二極體與聚焦透鏡構成的幫浦系統,增益介質 與輸入端及輸出端的耦合透鏡組成的共振腔,下面將簡單介紹這些部 分,以說明雷射的工作原理。. 雷射二極體. 輸入耦合鏡. 輸出耦合鏡 增益介質 d0. 聚焦透鏡. 雷射輸出 光軸. 光纖透鏡. 圖 2.9 再入射之雙鏡式環形共振腔雷射之系統架構。. 幫浦光源:. 雷射二極體的幫浦方式一般可分橫向與縱向幫浦,傳統的固態雷射 多採用閃光燈作為橫向幫浦光源,如今固態雷射則改用雷射二極體作為 16.
(29) 縱向幫浦的光源,以獲得較高的幫浦效率,因為比起傳統的閃光燈,高 功率半導體雷射的頻譜集中在 1 至 5nm 的範圍,與固態雷射的吸收頻寬 相當,因此幫浦的光功率可大幅下降,減少許多熱效應,也因此提昇了 固態雷射的穩定性,同時固態雷射的電光轉換效率高,所以其壽命也較 傳統閃光燈長,可達數萬小時。而且半導體雷射本身的體積遠比傳統幫 浦光源的龐大設備小很多,將縮小整個雷射系統體積。2 瓦的雷射二極 體幫浦光源的詳細資料如表 2-1 所示:. 表 2-1 雷射二極體規格表 LD 型號 Polaroid X9844C-P7998. 輸出功率 波長. 譜線寬度. 光束發散角. (W). (nm@室溫) (nm @FWHM) θ∥. 2. 807. 2.0. 10°. θ⊥ 2°. 聚焦透鏡:. 利用聚焦透鏡可將雷射二極體發出來 808nm波長的光聚焦至增益 介質上,我們的實驗架構所使用聚焦透鏡的聚焦長度為 25mm,直徑(φ) 為 12.7mm及曲率半徑為 25.28mm,適當地調整與雷射二極體及輸入端 耦合透鏡間的距離,能改變幫浦光點的模態及焦點位置,以配合雷射共 振腔模態,有效提升光對光的轉換效率,減少多餘的熱產生,而且也較 易得到基態橫模(TEM00),達到最佳的模態匹配。. 17.
(30) 雷射共振腔:. 基於體積小、降低成本及易於調整控制等因素,實驗裝置的雷射共 振腔我們利用兩個曲率半徑為 80mm 以及直徑為 25.4mm(φ)的凹面鏡, 凹面鏡的凹面部分鍍有對 1064nm 反射率大於 99.8%的介電質鍍膜 (dielectric coating),使波長 808nm 的半導體雷射光通過,激發 Nd:YAG 晶體,但無法讓波長 1064nm 的被激發光通過,因此便可得到在腔內振 盪及雷射輸出波長為 1064nm 的激發光。. 增益介質: 本實驗中所使用的增益介質為Nd:YAG(Nd3+:Y3Al5O12),中文名稱為 摻釹釔鋁石榴石,英文名稱為Neodymium Doped Yttrium. Aluminum. Garnet,Nd3+離子的摻雜濃度為 3%,大小為 3 毫米×3 毫米×1 毫米(mm3)。 近十年,以閃光燈作為橫向幫浦光源的固態雷射,因為光對光的轉換效 率並不高,因此需要較長的增益介質,以達到相同的轉換效率,但是如 此長度的增益介質,在共振腔中容易造成雷射光路徑的嚴重扭曲,而破 壞雷射光路徑在共振腔的對稱性,如今縱向幫浦的固態雷射,提昇了光 對光的轉換效率,也直接的解決了不能利用雙鏡做出環形共振腔的問 題。. 18.
(31) 第 三 章 再入射環形共振腔的腔長公式與近似解. 本章首先提及共振腔的腔長公式,然後再介紹共振腔的近似解。此 部份近似解方面的分析是一種近似的做法,它是我們以前運用 2 × 2 ABCD 矩陣所做的研究,並已發表的一些結果,在此做一個簡單的回 顧,以便將來在以下的章節中,與運用更嚴緊的精確解所做出來的結果 作比較。. 3.1 再入射環形共振腔的腔長公式. 再入射環形共振腔對於腔長是很敏感的,只要調整腔長就可產生各 種不同情況的再入射環形共振腔。因此,腔長公式的推導是首先要提及 的。此一腔長公式在我們的再入射環形共振腔中稱之為 再入射條件 (reentrant condition)。吾人可以使用一些基本的光學原理推導出再入射環 形共振腔的腔長與增益介質側移的關係式,並與實際做實驗所得的腔長 比較,關係式中包含了雷射光的輸出點數 N 與雷射光在腔內的迴圈數 M。其中 N 的物理意義為雷射光束在共振腔中來回行進時,打在輸入與 輸出耦合透鏡上的光點數目,而 M 的物理意義為雷射光束在共振腔中完 成一整圈的過程時,繞了幾個迴圈數。 m2. m1 1 2. 3. y z x 圖 3.1 再入射雙鏡式環形共振腔之立體圖。 19.
(32) 雷射光在共振腔中仍遵守反射定律,反射定律就是光在不同介質的 交界面上,其入射角與反射角相等,且反射光線、入射光線與法線皆位 於同一平面。如圖 3.1 所示,m1 與m2為共振腔的兩個球面鏡,光由第一 點經過第二點反射後到達第三點。利用反射定律的兩個規則,即入射角 等於反射角以及入射線、法線與反射線在同一平面,經由一連串的數學 運算,吾人可以推導出腔長的關係式如(3.1)式,其詳細的推導請參閱參 考文獻[12]。 d ⎫ ⎧ L = R ⎨2 − 2 cos 2 φ [sin −1 ( )]⎬ R ⎭ ⎩. (3.1). 上式中 φ = Mπ 2 N ,R為耦合鏡的曲率半徑,d為在耦合鏡上雷射的輸出 光點與光軸的距離,2φ 為在xy平面上,光由第一點到第二點所轉的角 度,N為雷射光在耦合鏡上的輸出點數,M為雷射光在腔內的迴圈數。 在此可由實際的實驗中驗證出對於特定雷射光在耦合鏡上的輸出 點數N與雷射光在腔內的迴圈數M跟腔長的關係。實驗中增益介質的側 移距離d0設定在 3mm左右,增益介質的側移距離d0定義為增益介質的中 心離光軸的垂直距離,也是光線距離光軸之最短距離,其中增益介質的 側移距離d0 與耦合鏡上雷射輸出光點和光軸的距離d是呈現cosφ 的關 係,即d0 =d cosφ ,如圖 3.2 所示。所以如果增益介質的側移距離愈大, 則雷射光點在耦合鏡上的輸出光點與光軸的距離也愈大。. 圖 3.2 N=2 , M=1 的端視圖。 20.
(33) 下面茲列出五種不同輸出點數的實驗結果,列出經由電腦模擬(3.1) 式所得的腔長與實際做實驗所得的腔長,此模擬腔長是針對增益介質的 側移距離d0為 3mm時的腔長,並將模擬的腔長與實驗腔長做比較,討論 (3.1)式腔長公式的準確性。. 表 3-1 模擬腔長與實驗腔長的比較表. 腔 N. 長. M. 模擬腔長. 實驗腔長. 有效腔長. (mm). (mm). (mm). N=9. M=5. 94.1. 93.7. N=7. M=3. 62.3. 62.7. N=5. M=2. 55.3. 55.7. N=3. M=1. 40.1. 41.7. N=2. M=1. 80.1. 78.7. 1692.2 868.1 554.2 240.6 320.4. 誤差值 0.4% 0.6% 0.7% 1.9% 1.7%. 誤差值計算公式如下:. 誤差值=. 模擬腔長 − 實驗腔長 模擬腔長. × 100 %. (3.2). 其中有效腔長為 2NlNM,lNM代表輸出點數為N,雷射光在腔內的迴圈數 為M的系統架構中,雷射在輸出耦合透鏡上的光點與下一個在輸入耦合 透鏡上的雷射光點之間的距離,lNM的公式如下,其詳細推導請參閱參考 文獻[12]。. l NM = 2 R sin(. Mπ Mπ d ) 1 − cos 2 ( ) cos 2 [sin −1 ( )] R 2N 2N. 21. (3.3).
(34) 由表 3-1 中可發現模擬腔長與實驗腔長的誤差值約在 1%左右。利 用基本的光學原理推導出的腔長公式,與實驗的腔長相當吻合。我們也 發現,其誤差值與有效腔長成反比,其有效腔長即為雷射光在共振腔中 行進一整圈之後,在共振腔中實際走的距離。. M/N =0.9. 2. M/N =0.7. L /R. 1.5 M/N =0.5 1. M/N =0.3. 0.5. M/N =0.1 0 0. 0.2. 0.4. 0.6. 0.8. 1. d /R. 圖 3.3 d/R 與 L/R 對於 M/N 從 0.1 到 0.9 的關係. 從圖 3.3 中可以發現,對於固定一個雷射光在耦合鏡上的輸出點數 N,及腔內的迴圈數 M 來說,則增益介質的側移距離越長,則腔長也越. 長,其中增益介質的側移距離與耦合鏡上雷射輸出光點和光軸的距離 d 成正比。另外我們還發現,M/N 的比率越大,則腔長也越長。. 表 3-2 是固定某一個雷射光在耦合鏡上的輸出點數N=5,將(N,M) =(5,1), (5,2), (5,3), (5,4)的俯視圖、端視圖及腔長都整理成的表,端視圖 22.
(35) 是從x y平面去看雷射的輸出情形,而俯視圖則是從y z平面去看雷射光在 共振腔的路徑。以下兩張圖表中的腔長是增益介質的側移距離d0 =3mm 時的腔長。由表 3-2,可以發現,對於固定一個輸出點數N=5,則腔內的 迴圈數M越大,則腔長也越長。表 3-3 則是針對某一個腔內的迴圈數 M=3,(N,M) =(4,3), (5,3), (7,3), (8,3)的俯視圖、端視圖及腔長,我們可以. 發現,對於固定一個腔內的迴圈數M=3,則輸出點數N越大,則腔長也 越短。. 23.
(36) N=5. M. 端視圖 (End View). 俯視圖 (Top View). 腔長 (mm). 1. 15.39. 2. 55.39. 3. 104.83. 4. 144.83. 表 3-2 N=5 , M=1、2、3、4. 24.
(37) M=3. N. 端視圖 (End View). 俯視圖 (Top View). 腔長 (mm). 4. 135.69. 5. 104.83. 7. 60.76. 8. 47.57. 表 3-3 M=3 , N=4、5、7、8. 25.
(38) 3.2 再入射環形共振腔的近似解. 通常吾人可以運用 2 × 2 ABCD矩陣來描述高斯光束在週期性的光學 系統中的光學行為。所謂週期性的光學系統是指一連串具有相同光學元 件的週期性系統 ,光線在兩個曲率半徑分別為R1 及R2 的球面鏡共振腔 中來回不斷反射行進的系統就是一個週期性的光學系統。再入射環形共 振腔中雷射光束的行進情形,吾人可使用近軸近似的方式來分析。近軸 近似指的是光線在傳輸的過程中與光軸夾的角度非常小,此角度約等於 其正弦值,即sinθ≈θ,一般約在 5°之內,此種光線稱為近軸光線,探 討此種原理的光學稱之為近軸光學。在此近似解中我們並沒有考慮到共 振腔的非正交性質,因此,鏡子的效應在x 及y 方向視為相同,同時也 沒有考慮到座標軸的旋轉問題。茲考慮如圖 3.4 所示由兩個曲率半徑分 別為 R1 及R2,腔長為 L 的共振腔。[59-61]. 圖 3.4 兩個曲率半徑分別為 R1 及R2,腔長為 L 的共振腔。. 26.
(39) 設光線由曲率半徑為 R1的左邊鏡子處出發,向右行進一段距離 L 到達曲率半徑為 R2的右邊鏡子, 經右邊鏡子反射之後向左行進一段距 離L 到達左邊鏡子,再經左邊鏡子反射之後回到原出發點。此時描述光 線在共振腔中行進一整圈的光線傳輸矩陣可表為 ⎡A B⎤ ⎡ 1 ⎢C D ⎥ = ⎢− 2 ⎦ ⎢⎣ ⎣ R1. 0 ⎤ ⎡1 L ⎤ ⎡ 1 1⎥⎥ ⎢0 1 ⎥ ⎢⎢− 2 ⎦⎣ R2 ⎦⎣. 0 ⎤ ⎡1 L ⎤ 1⎥⎥ ⎢0 1 ⎥ ⎦ ⎦⎣. 2 ⎡ ⎤ 1 − 2L 2L − 2L R2 R2 ⎢ ⎥ ⎢ ⎥ 4 2 L L = 1− 2 2 ⎢ ⎥ 4 4 L L R1 R2 − + R2 − R1 R1 R2 ⎥ R1 − 2 ⎢ R2 ⎣ ⎦. (3.4). 若光線在共振腔中來回行進了N 次個一整圈,則表示最初的光線矩陣之 位移 ri 與斜率 ri ' 以及表示最後的光線矩陣之位移 r f 與斜率 r f ' 之間 的關係可表為 N. ⎡ r f ⎤ ⎡ A B ⎤ ⎡ ri ⎤ ⎢r '⎥ = ⎢ ⎥ ⎢ '⎥ ⎣ f ⎦ ⎣C D ⎦ ⎣ri ⎦. (3.5). (3.5)式的 ABCD 矩陣乃由(3.4)式所得。(3.4)式的 ABCD 矩陣是由行列式 均為 1 的 2 × 2 矩陣相乘,因此,(3.4)式的 ABCD 矩陣之行列式亦為 1, 亦即 AD - BC = 1. (3.6). 茲定義角度 γ 為 cos γ =. 1 ( A + D) 2. 27. (3.7).
(40) 吾人可證明 N. ⎡A B⎤ 1 ⎡ A sin Nγ − sin( N − 1)γ ⎢C D ⎥ = sin γ ⎢ C sin Nγ ⎦ ⎣ ⎣. B sin Nγ ⎤ D sin Nγ − sin( N − 1)γ ⎥⎦. (3.8). 上式一般稱之為 Sylvester 定理。(3.8)式可由數學歸納法證明如下。首 先,N=1 顯然是成立的,其次,若對任意 N 值(3.8)式成立的話,那麼由 N +1. N. ⎡ A B ⎤⎡ A B ⎤ ⎡A B⎤ = ⎢C D ⎥ ⎢C D ⎥ ⎢C D ⎥ ⎦ ⎦⎣ ⎦ ⎣ ⎣ 2 1 ⎡( A + BC ) sin Nγ − A sin( N − 1)γ = ⎢ sin γ ⎣ C ( A + D) sin Nγ − C sin( N − 1)γ. B( A + D) sin Nγ − B sin( N − 1)γ ⎤ ⎥ ( BC + D 2 ) sin Nγ − D sin( N − 1)γ ⎦. ----------------------(3.9) 上式每一項均可化簡之,最後(3.9)式可化簡為 ⎡A B⎤ ⎢C D ⎥ ⎦ ⎣. N +1. =. 1 ⎡ A sin( N + 1)γ − sin Nγ C sin( N + 1)γ sin γ ⎢⎣. B sin( N + 1)γ ⎤ D sin( N + 1)γ − sin Nγ ⎥⎦. (3.10). (3.10)式乃(3.8)式中的 N 代之以 N+1 的情形,亦即若(3.10)式的 N 成 立,則 N+1 亦成立。因此,證明了 Sylvester 定理。由(3.5)式可得 ⎡ rf ⎤ 1 ⎡ A sin Nγ − sin( N − 1)γ ⎢r ' ⎥ = ⎢ C sin Nγ ⎣ f ⎦ sin γ ⎣. B sin Nγ. ⎤ ⎡ ri ⎤ ' D sin Nγ − sin( N − 1)γ ⎥⎦ ⎢⎣ri ⎥⎦. (3.11). 又由(3.4)式及(3.5)式可得. cos γ =. 1 2 L 2 L 2 L2 ( A + D) = 1 − − + 2 R1 R2 R1 R2. (3.12). 由(3.11)式可得光線在共振腔中來回行進了 N 次個一整圈之後的光線 28.
(41) 矩陣。由於 sin Nγ = (e iNγ − e −iNγ ) / 2i ,因此,若 γ 為複數(例如 γ = a + bi ,則 e iN ( a + bi ) − e − iN ( a + bi ) = e − bN e iaN − e bN e − iaN ),那麼當 N 很大時, e bN 將會很大,而. 使得 r f 發散,最後光線將會跑出腔外。因此,為了得到穩定的共振腔, γ 必需為實數,亦即 cos γ ≤ 1. (3.13). 由(3.12)式可知. −1 ≤ 1−. 2 L 2 L 2 L2 − + ≤1 R1 R2 R1 R2. (3.14). 於是 L L L2 0 ≤ 1− − + ≤1 R1 R2 R1 R2. 茲定義共振腔穩定因子 g1 , g 2 為 g1 = 1 −. (3.15). L L , g 2 = 1 − ,則 R1 R2. 0 ≤ g1 g 2 ≤ 1. (3.16). 對於環形共振腔的再入射條件,A. Yariv與R. Kompfner等人利用 近軸近似的方法來分析,其所求得環形共振腔的再入射條件並不包含. 非共平面環形共振腔,因為非共平面環形共振腔是非近軸且非正交的 結構。由文獻中也知道腔長與φyariv的關係如下:[14] L = 2 f (1 − cos φ yariv ). (3.17). 但是我們知道,實際上此為共焦點式的共振腔,光線在共振腔中是呈現 29.
(42) 三角形的路徑,[15]而且此共振腔的穩定度,在 x 方向及 y 方向上皆為不 穩定,如 (3.18) 式所示,其分析圖為圖 3.5。[12]. ⎧ ⎪ A + D ⎪⎪ =⎨ 2 ⎪ ⎪ ⎪⎩. ,in xz plane. 1. (3.18) ⎡ 2 cos(2θ) ⎤ 2⎢ − 3⎥ − 1 4 ⎣ cos θ ⎦ 2. ,in yz plane. 其中θ≣sin-1(d/R),d 為在耦合鏡上雷射的輸出光點與光軸的距離,R 是耦合鏡的曲率半徑,在 x 方向為 R/cosθ,而在 y 方向為 Rcosθ。 4. 22d. 穩定度. 3. y yz-plane. 2. x. z. 1 xz-plane. 0 0. 0.2. 0.4. d /R. 0.6. 圖 3.5 平面 8 字環形共振腔的穩定度分析圖。. 30. 0.8.
(43) 再入射環形共振腔是一種非正交且非近軸的共振腔,所以無法利用 近軸近似的方法分析雷射光在腔內的行為,而且利用近軸近似無法考慮 到增益介質的側移對腔長的影響。下面我們將利用 2 × 2 ABCD 矩陣的 方法來分析此種非正交且非近軸的環形共振腔,利用此種方法所得到的 結果只能算是一種近似的結果。在第四章中我們將用更嚴格的高斯光束 傳輸的方法討論它的精確結果,並比較近似解與精確解之間的關係。圖 3.6 是輸出點數為 3,雷射光在腔內的迴圈數為 1 即(N=3, M=1)的側視 圖,因為我們目的是想要瞭解增益介質上的雷射光束的大小,所以選擇 L/2 處為參考面。. m1. m2. L 圖 3.6 N=3, M=1 的空腔側視圖。. 定義M1矩陣為光線由L/2到鏡子m2 的光線傳輸矩陣: ⎡ ⎢1 M1 = ⎢ ⎢ ⎢0 ⎣⎢. l31 ⎤ 2⎥ ⎥ ⎥ 1⎥ ⎦⎥. (3.19). 其中l31代表輸出點數為 3,雷射光在腔內的迴圈數為 1 即(N=3, M=1)的 系統架構中,雷射在輸出耦合透鏡上的光點與下一個在輸入耦合透鏡上 的雷射光點之間的距離。M2矩陣為光線經由鏡子m2反射的光線傳輸矩 陣: 31.
(44) ⎡ ⎢ 1 M2 = ⎢ ⎢− 2 ⎢ ⎣R. ⎤ 0⎥ ⎥ ⎥ 1⎥ ⎦. (3.20). M3矩陣為光線經由鏡子m2至鏡子m1 的光線傳輸矩陣:. l31 ⎤ ⎥ ⎥ 1 ⎥⎦. ⎡1 M3 = ⎢ ⎢ ⎢⎣0. (3.21). 則任意光線在腔內往返一週的光線傳輸矩陣矩陣,Mrt為 M rt = M 1 M 2 ( M 3 M 2 ) 5 M 1. (3.22). 如果以輸出點數為 N,雷射光在腔內的迴圈數為 M,則任意光線在腔內 往返一週的光線傳輸矩陣矩陣,可以化為一般式子:. ⎡A B⎤ M rt = M 1 M 2 ( M 3 M 2 ) ( 2 N −1) M 1 = ⎢ ⎥ ⎣C D ⎦. (3.23). 其中 M 1 , M 2 , M 3 定義為. ⎡ ⎢1 M1 = ⎢ ⎢ ⎢0 ⎢⎣. ⎡ ⎢ 1 M2 = ⎢ ⎢− 2 ⎢ ⎣R. l NM ⎤ 2 ⎥ ⎥ ⎥ 1 ⎥ ⎥⎦. (3.24). ⎤ 0⎥ ⎥ ⎥ 1⎥ ⎦. (3.25). 32.
(45) ⎡1 M 3 = ⎢⎢ ⎢⎣0. l NM ⎤ ⎥ ⎥ 1 ⎥⎦. (3.26). 其中lNM代表輸出點數為N,雷射光在腔內的迴圈數為M的系統架構中, 雷射在輸出耦合透鏡上的光點與下一個在輸入耦合透鏡上的雷射光點 之間的距離,lNM 的公式為[12]. l NM = 2 R sin(. Mπ Mπ d ) 1 − cos 2 ( ) cos 2 [sin −1 ( )] 2N 2N R. (3.27). 1 ( A + D) ≤ 1 2. (3.28). 共振腔穩定條件為 −1 ≤. 在L/2 處參考面的曲率半徑R0和光腰ω0可由下式求出. 2B R0 = D−A. ,. ⎛ ⎛ A + D ⎞2 ⎞ ⎟ ω 0 = sqrt (λB / π )⎜1 − ⎜ ⎜ ⎝ 2 ⎟⎠ ⎟ ⎝ ⎠. 1/ 4. (3.29). 3.3 再入射雷射共振腔近似解的穩定性分析. 接下來要來探討的是經由近似解所得到的一些結果。首先來看在分 別固定某一個輸出點數 N,或固定某一個雷射光在腔內的迴圈數 M,其 雷射光在輸出耦合鏡上距離鏡軸的距離 d 除以曲率半徑 R 與穩定度的關 係。共振腔的穩定度,在物理上的意義是任意光線在共振腔內往返任意 多次後都不會橫向偏折出共振腔外。當(3.28)式的條件得到滿足時,腔 內雷射光線均可往返無限次數而不會橫向偏折腔外。. 33.
(46) 由圖 3.7 可知,以固定某一個輸出點數N=5 及固定雷射光距離鏡軸的距 離d除以曲率半徑R下,則穩定度的靈敏度隨雷射光在腔內的迴圈數M的 減少而增高,因為雷射光在輸出耦合鏡上距離鏡軸的距離d與增益介質 側移距離d0是呈現正比的關係,所以可得知固定在某一個輸出點數N=5 及固定增益介質側移距離d0下,則穩定度的靈敏度隨雷射光在腔內的迴 圈數M的減少而增高。 圖 3.8 為固定某一個雷射光在腔內的迴圈數M=1,針對雷射光輸出 點數的不同,觀察其d/R與穩定度的關係。由圖 3.8 可知,固定雷射光在 輸出耦合鏡上距離鏡軸的距離d除以曲率半徑R下,則穩定度的靈敏度隨 輸出點數N的增加而昇高,因為雷射光在輸出耦合鏡上距離鏡軸的距離d 與增益介質側移距離d0是呈現正比的關係,所以可得知在固定某一個雷 射光在腔內的迴圈數M=1 及固定增益介質側移距離d0下,則穩定度的靈 敏度隨輸出點數N的增加而昇高。圖 3.9 與圖 3.10 列出固定N=5 及固定 M=1 的光腰尺寸(spot size)與d/R的關係圖,由圖 3.10 中,我們發現在固 定M=1 且M/N<0.5 的情況下,則光腰尺寸隨著d的增加而增加,若M/N ≥ 0.5 則光腰尺寸隨著d的增加而減小。. 34.
(47) 1.0. M =4. 穩定度. 0.5. M =3. 0.0. M =2 M =1 -0.5. -1.0 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 3.7 固定輸出點數 N=5 其 d/R 與空腔穩定度的關係圖。. 1.0. N =2. 穩定度. 0.5. N =3 N =4. 0.0. N =5. -0.5. -1.0 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 3.8 固定雷射光在腔內迴圈數 M=1 其 d/R 與空腔穩定度的關係。. 35.
(48) 0.24 M =2. 0.23. M =3. Spot Size(mm). 0.22 0.21 0.20 0.19. M =1. 0.18 M =4. 0.17 0.16 0.15 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 3.9 固定輸出點數 N=5 其 d/R 與空腔的光腰尺寸的關係圖。. 0.24. N =2 M =1 0.23. N =3 M =1. Spot Size(mm). 0.22. N =3 M =2. 0.21 0.20. N =4 0.19 0.18. N =5 M =1. 0.17 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 3.10 固定輸出點數 M=1 其 d/R 與空腔的光腰尺寸關係圖。. 36.
(49) 其次考慮共振腔中加入增益介質時的情形。首先研究固定輸出點數 N=5,雷射光束隨著增益介質的側移距離的增加的穩定度關係。將增益 介質加入共振腔中,穩定度並不像空腔一樣,在d為任何值時皆小於 1。 由圖 3.11 可知,固定某一個輸出點數N=5,則雷射光在腔內的迴圈數M 愈大,環形共振腔要穩定,增益介質的側移d0也需愈大,這一點是與空 腔的穩定性質最不同的地方。其次考慮固定雷射光束在腔內的迴圈數 M=1,雷射光束隨著增益介質的側移距離的增加的穩定度關係。由圖 3.12 可知,固定雷射光在腔內的迴圈數M=1,則雷射光輸出點數N愈小,環 形共振腔要穩定,增益介質的側移d0需愈大,這一點也是與空腔的穩定 性質不同的地方。經由以上的介紹,吾人可以得到一個結論,無論是固 定雷射光的輸出點數N,或是固定雷射光在腔內的迴圈數M,若腔長越 長,環形共振腔若要達到穩定,則增益介質的側移距離d0也需越長,換 言之,若實驗上要做較長腔長的輸出點數,使用較大的耦合透鏡,此共 振腔穩定性較佳。圖中q 代表穩定度. 1 ( A + D) 。 2. 由圖 3.11 及圖 3.12 吾人可以發現,將增益介質加入共振腔中,穩 定度並不像空腔一樣,在 d 為任何值時皆小於 1,對於一個特定的 N,M 值,要使雷射共振腔達到穩定,則也存在一個特定的 d,也就是說,要 使環形的共振腔達到穩定,則增益介質的側移距離也不同。對於共振腔 中加入增益介質,會破壞共振腔的對稱性,為了減少因為加入增益介質 而造成的共振腔對稱性的破壞,所以再入射雙鏡式環形共振腔中所使用 的增益介質是 Nd:YAG,其 Nd3+離子的摻雜濃度為 3%,大小為 3 毫米× 3 毫米×1 毫米(mm3)。. 37.
(50) 0.0E+00 -1.5E-05. 2.0E-02. 4.0E-02. 6.0E-02. 8.0E-02. 1.0E-01. -1.0E-05. 0.0E+00 5.0E-06 1.0E-05. M=1. 2. 3. 4. 1.5E-05. d /R. 圖 3.11 固定輸出點數 N=5 其 d/R 與 1-q 的關係圖。. 0.0E+00 2.0E-02 4.0E-02 6.0E-02 8.0E-02 1.0E-01 -1.5E-05 -1.0E-05 -5.0E-06 1-q. 1-q. -5.0E-06. 0.0E+00 5.0E-06 1.0E-05 1.5E-05. N=5. 4. 3. 2. d /R. 圖 3.12 固定雷射光在腔內的迴圈數 M=1 其 d/R 與 1-q 的關係。 38.
(51) 第 四 章 立體 8 字形再入射環形共振腔的分析 當 N =2, M=1 時,在共振腔中的行進的雷射光束,其路徑在空間形 成一個立體的 8 字形。這種立體 8 字環形共振腔,其光線每經過一次鏡 子反射時,描述光線的座標系統正好對共振腔的光軸旋轉 90 度。其次, 由於考慮到球面像差,因而必須對鏡子的曲率半徑作修正,雖然此修正 量很小,但是它卻大大的影響共振腔的穩定性。在本章中我們藉著高斯 光束在共振腔中的行進一整圈且滿足 自我協調的條件 (self-consistent condition),推導出解析解,並得到一個穩定性分析的條件。另外亦可利 用格林(J. M. Greene)殘數方法來描述其穩定性質,這兩種描述穩定性的 方法是一致的。 4.1 非共平面雷射光束的轉動 (N,M)=(2,1) 的情形就是所謂的雙鏡式立體 8 字環形共振腔,其光 線在共振腔中的行進路線,如圖 4.1 所示。下面將證明 (N,M)=(2,1) 的 情形可用類似正交共振腔的做法來分析。設Z座標軸(Zcav) 是沿著共振腔 的光軸方向,X cav與 Y cav 分別與 Z cav 垂直,並維持右手座標系統,其 原點在兩輸入及輸出透鏡鏡心連線之中央。 雙鏡式立體 8 字環形共振 腔在輸入及輸出透鏡上,四個光點 1, 2, 3, 4 的位置,若以直角座標表示 之為 1( d ,0. − l ). ,. 2(0, d , l ). ,. 3( − d ,0,−l ). ,. 4(0,− d , l ). 雷射光束乃循著 1-2-3-4-1 行進,在腔內形成一個立體 8 字形。 其 39.
(52) 中 d 為四個光點至 z 軸的距離,d 0 為增益介質側移的距離,而 d 0 與 d 的關係為 d 0 = d / 2 。 l 為從 xz 平面上來看,點 1 及點 3 的連線與. 點 2 及點 4 的連線之間的距離。而兩個輸入及輸出透鏡的曲率中心 M1 及M2的位置之直角座標為 M1(0,0,-(R-L/2)), M2(0,0,(R-L/2))。 輸入及 輸出透鏡的曲率半徑 R 等於 M2 至點 1 及點 3 的距離或 M1至點 2 及 點 4 的距離。令向量 A、B、C分別代表連接點 2 至點 1 的向量,點 2 至點 3 的向量,以及點 2 至點 M1 的向量。則由兩向量的內積 A.C 以及C.B相等,可知A與C以及 C與 B 之間的夾角相等,且其夾角 Ω 為 cos Ω = R. R2 + d 2. 。因為向量A、B、C 共平面,由兩向量的外積 A×C. 與A×B互相平行, 可得 L = R − L / 2,由此可知 M1 與點 1 及點 3 共線, M2 與點 2 及點 4 共線。又點 1 與點 2、點 2 與點 3、點 3 與點 4、 點 4 與點 1 之間的距離均相等,若以 a 表示,則為 a = R 2 + d 2 。. 圖 4.1 立體 8 字環形共振腔的光線圖。 設光線由點 1 出發,則循著 12 路徑由輸入透鏡行進至輸出透鏡,稱 40.
(53) 之為 beam 1,它係落在由點 1、點 2 及點 3 所構成的 123 平面上。 當光線由點 2 行進至點 3 時,稱之為 beam 2,它係落在由點 2、點 3 及點 4 所構成的 234 平面上。同理,光線由點 3 行進至點 4 時,稱之 為 beam 3,它係落在由點 3、點 4 及點 1 所構成的 341 平面上。光線 由點 4 行進至點 1 時,稱之為 beam 4,它係落在由點 4、點 1 及點 2 所 構成的 412 平面上。共振腔中行進的雷射光束,每經過一次鏡子的反射 時,其光束的行進方向均會改變,且光束的入射面均會旋轉一個角度。 因此,在每經過一次鏡子的反射時,則必須改變描述光束的座標系統。 如圖 4.2 所示,有兩個方法可以用來描述座標系統的變換。圖 4.2(a)顯 示以光束的行進方向為旋轉軸的座標系統。此時,如果運用兩個連續的 入射面之法線向量的內積,吾人可以證明在每經過一次鏡子的反射時, 其入射面均會以光束的行進方向為軸旋轉一個角度 cos −1 (d. 2. R2. ) 。利用這. 個座標系統的變換關係,吾人可以用近軸近似的方法來分析光束在共振 腔中的行進情形。然而,在此情況下,由於座標系統旋轉的角度不是等 於 90 度,因此,光束參數在 x方向與 y方向是不能分開的。用這種方 法來處理,共振腔顯然是非正交的,[62-64] 因此,很難得到一個解析解。 如果選擇以共振腔的光軸為旋轉軸,如圖 4.2(b)所示,那麼就可以證明 在共振腔中雷射光束每經過一次鏡子的反射時,其入射面均會繞共振腔 的光軸旋轉一個 90 度。亦即,由 123 平面轉至 234 平面,或由 234 平 面轉至 341 平面,或由 341 平面轉至 412 平面,以及由 412 平面轉 至 123 平面,均需繞 Zcav 軸逆時針旋轉 90 度。下面我們將證明此一 41.
(54) 事實 。. beam axis. Zbeam. Beam 12. Beam 23. Beam 34. Beam 41. Beam 12. (a). cavity axis. Zcav. Beam 12. Beam 23. Beam 34. Beam 41. Beam 12. (b) 圖 4.2 在共振腔中行進一整圈的雷射光束行進情形的等值描述, (a)圖為近軸但非正交方式, (b)圖為非近軸但正交方式。 首先 , 由四個光點 1,2,3,4 的直角座標可知 123 平面的方程式為 2ly − dz − dl = 0 ,此平面的法線向量的方向分量為 (0,2l ,− d ) 。若以由點 1. 至點 2 的方向為 beam 1 的 z 方向,而 123 平面的法線方向為 beam 1 的 x 方向,並維持右手座標系統,則表示 beam1 的三個直角座標單位 42.
(55) 向量為 ∧. 1. x1 =. 4l 2 + d 2. ∧. (0,2l ,−d ). 1. y1 =. (4l + d )(4l + 2d ) 2. 2. ∧. z1 =. 2. 2. 1. (4.1). (−(4l 2 + d 2 ),− d 2 ,−2ld ). (4.2). (−d , d ,2l ). 4l + 2d 2 2. (4.3). beam 2 是由 beam 1 經過輸出透鏡反射而得的光線。Beam 2 現在是落 在 234 平面。而 234 平面的方程式為 2lx − dz + dl = 0,其法線向量的方 ∧. ∧. 向分量為 (2l ,0,− d ) 。若以 z1 表由點 3 至點 2 的單位向量,以 x1' 表 '. 234 平面法線方向的單位向量,並維持右手座標系統,則表示 beam 2 的三個直角座標單位向量為 ∧. 1. x1 = '. 4l 2 + d 2. ∧. (2l ,0,− d ). 1. y1 = '. (4l + d )(4l + 2d ) 2. 2. ∧. z1 =. 2. 1. '. 4l + 2d 2 2. ∧. 2. (4.4). (− d 2 , (4l 2 + d 2 ),−2ld ). (4.5). (d , d ,2l ) ∧. (4.6). ∧. 此三個單位向量亦可由 x1 、 y1 、 z1 繞 Zcav 軸逆時針旋轉 90 度而得。 亦即若以 Rz (90 0 ) 代表繞 Zcav 軸逆時針旋轉 90 度的轉動運算,則 ∧. ∧. ∧. x1 = Rz (90 0 ) x1 , y1 '. '. ∧. ∧. ∧. = Rz (90 0 ) y1 , z1' = Rz (90 0 ) z1. 其中繞 Zcav 軸旋轉一個角度 ϕ 0 的轉動矩陣為 43. (4.7).
(56) ⎡ cos ϕ 0 R z (ϕ 0 ) = ⎢⎢− sin ϕ 0 ⎢⎣ 0. sin ϕ 0 cos ϕ 0 0. 0⎤ 0⎥⎥. 1⎥⎦. (4.8). 現在由於beam 2 是 beam 1 的反射光線 ,其方向是由輸出透鏡朝向輸 入透鏡行進,與beam 1 相反。為了統一表示 beam 2 的方向也是朝 Z 軸 的正方向行進,並維持右手座標系統,我們必須把座標軸 Zcav 與Ycav 的 方向一起反轉。亦即新的座標 Zcav’= - Zcav 與Ycav’= - Ycav,此時表示 beam 2 的三個直角座標單位向量變為 ∧. 1. x2 =. 4l 2 + d 2. ∧. (2l ,0, d ). 1. y2 =. (4l + d )(4l + 2d ) 2. 2. 2. ∧. z2 =. 2. 1 4l + 2d 2 2. (− d 2 ,−(4l 2 + d 2 ),2ld ). (d ,−d ,−2l ). (4.9). (4.10). (4.11). 同理可證,由 234 平面轉至 341 平面是繞新的 Zcav’軸順時針旋轉 90 度而得。Beam 3 是由點 3 行進至點 4 ,它係落在 341 平面上。表示 beam 3 的三個直角座標單位向量為 ∧. 1. x2 = '. 4l + d 2 2. ∧. (0,2l , d ). 1. y2 = '. (4l + d )(4l + 2d ) 2. 2. ∧. z2 =. 2. 1. '. 4l 2 + 2d 2 ∧. ∧. 2. ((4l 2 + d 2 ),−d 2 ,2ld ). (d , d ,−2l ) ∧. (4.12). (4.13). (4.14). 此三個單位向量亦可由 x2 、 y 2 、 z 2 繞 Zcav’ 軸順時針旋轉 90 度而得。 44.
(57) 亦即若以 R z ' (−90 0 ) 代表繞 Zcav’ 軸順時針旋轉 90 度的轉動運算,則 ∧. ∧. ∧. x 2 = R z ' (−90 ) x 2 , y 2 '. 0. ∧. ∧. ∧. = R z ' (−90 ) y 2 , z 2 ' = R z ' (−90 0 ) x2. '. 0. (4.15). 若考慮 beam 3 的方向是朝 Z 軸的正方向行進,並維持右手座標系 統,則必須把座標軸 Zcav’ 與Ycav’ 的方向再轉回 Zcav 與Ycav來。此時表 示 beam 3 的三個直角座標單位向量變為 ∧. 1. x3 =. 4l + d 2 2. ∧. (0,−2l ,−d ). 1. y3 =. (4l + d )(4l + 2d ) 2. 2. ∧. 2. 2. 1. z3 =. 4l 2 + 2d 2. ((4l 2 + d 2 ), d 2 ,−2ld ). (d ,−d ,2l ). (4.16). (4.17). (4.18). 由beam 3 所在的 341 平面轉到beam 4 所在的 412 平面,與前述由 beam 1 轉到beam 2 相同,係由繞 Zcav 軸逆時針旋轉 90 度而得 。而 由beam 4 所在的 412 平面轉到beam 1 所在的 123 平面,與前述由 beam 2 轉到beam 3 相同,係由繞 Zcav’ 軸順時針旋轉 90 度而得 。表 示 beam 4 的三個直角座標單位向量為 ∧. x4 =. 1 4l 2 + d 2. ∧. y4 =. (−2l ,0, d ). 1 (4l + d )(4l + 2d ) 2. ∧. z4 =. 2. 2. 1 4l 2 + 2d 2. 2. (d 2 , (4l 2 + d 2 ),2ld ). (−d , d ,−2l ). (4.19). (4.20). (4.21). 它再繞 Zcav’軸順時針旋轉 90 度之後就又變成 beam 1 的三個單位向 45.
(58) 量。由於繞 Zcav’軸順時針旋轉 90 度等於繞 Zcav 軸逆時針旋轉 90 度,因此,整個立體 8 字形雷射光束在腔內經過完整的一整圈是由四次 繞 Zcav 軸逆時針旋轉 90 度的情形,由此證明了在這種情況下,此種 共振腔為正交共振腔。[39] 另外,對於 M 與 N 等於其它情況的各種再入 射的共振腔 ,雷射光束在環形共振腔內每經過一次球面鏡的反射,其 入射面均會繞Zcav 軸旋轉 (π − 2φ ) 度的證明,在附錄 A 中有詳細的推 導。. 表 4-1 立體 8 字環形共振腔四個入射面的座標. 46.
(59) Incident plane Plane 123. Plane equation. Coordinates. 2 l y-dz-d l = 0. x1 =. ∧. 1. (0,2l ,− d ). 4l 2 + d 2. ∧. y1 =. (4l. 1. ∧. z1 =. Plane 234. 2 l x-dz+d l = 0. ∧. x2 =. +d. 2. 2. 1 4l 2 + 2d 2 1 4l 2 + d 2. ∧. y2 = ∧. z2 =. Plane 341. 2 l y+dz+d l = 0. ∧. x3 = ∧. y3 =. (4l. +d. 2. ). (− (4l. 2. ). + d 2 ,− d 2 ,−2ld. (2l ,0, d ). )(4l. 2. + 2d. 2. ). ((−d ,−(4l 2. 2. ) ). + d 2 ,2ld. 1. (d ,− d ,−2l ) 4l + 2d 2 1 (0,−2l ,− d ) 4l 2 + d 2 1. (4l. 2. +d. 2. )(4l. 2. + 2d. 2. ). ((4l. 2. ). + d 2 , d 2 ,−2ld. 1. (d ,−d ,2l ) 4l 2 + 2d 2 ∧ 1 x4 = (−2l ,0, d ) 4l 2 + d 2 ∧ 1 y4 = d 2 , 4l 2 + d 2 ,2ld 2 2 2 2 4l + d 4l + 2d. (. )(. ∧. z4 =. 1 4l + 2d 2. 4.2 像散性以及球面像差. 47. ). (−d , d ,2l ). 2. ∧. 2 l x+dz-d l = 0. + 2d. 2. 1 2. z3 =. Plane 412. )(4l. 2. 2. ). (− d , d ,−2l ). ( (. ) ). ).
(60) 雖然對於再入射雙鏡式環形共振腔雷射系統,雷射光在共振腔內的 光學行為是考慮到近軸近似的。但是基本上我們還必須考慮到輸入及輸 出耦合透鏡上由於斜角入射所產生的像散性(astigmatism)。[65,66] 茲考慮 如圖 4.3 所示的入射光,其反射光收斂於 S 及 T 兩條相互垂直的直 線。在 正切平面 (tangential plane)上的反射光聚焦於 T,在 弧矢平面 (Sagittal plane)上的反射光聚焦於 S。由於像散性所造成的球面曲率半徑 的效應表示如下:[67-69] RT = R cos Ω. RS =. ,. (正切平面). R cos Ω. (4.22). (弧矢平面). 其中 RT 及 RS 為由於像散性在兩個互相垂直的平面上的曲率半徑。 其次,雖然吾人是考慮到高斯光束是近軸近似的,然而一條光線打 在鏡面上的位置其與光軸是有一定的距離的,它會導致球面像差的產 生,也因此而導致必須對曲率半徑做修正。雖然此一修正很小,但是隨 後將會發現它對解析解的分析有很大的影響。. 48.
(61) incident beam Ω optical axis. T. S. 圖 4.3 由凹面鏡所形成的斜角入射之影像。. 圖 4.4 入射線入射於球面鏡上 T 點 , 反射之後通過軸上 Q 點。 如圖 4.4 所示,茲考慮一束光線平行於光軸而入射在曲率半徑為 R. 49.
(62) 的球面鏡之 T 點處,其與光軸的距離為 d。經球面鏡的反射之後,反射 線與光軸相交於. Q 點處。應用幾何光學的反射定律可得. ∠STC = ∠CTQ = θ = sin −1 (d / R) 。利用簡單的代數運算可證得. QA =. 1 R R⎛ (2 − secθ ) = ⎜ 2 − ⎜ 2 2 1 − (d / R )2 ⎝. ⎞ ⎟. ⎟ ⎠. (4.23). 由於近軸光線的焦距為曲率半徑的一半,即 R/2,因此,非近軸光線的 有效曲率半徑可表為 ⎛ 1 Reff = R (2 − sec θ ) = R ⎜ 2 − 2 ⎜ 1 − (d / R ) ⎝. ⎞ ⎟. ⎟ ⎠. (4.24). 利用這個修正可得由於像散性所造成的球面曲率半徑的修正為 ⎧ RT = Reff cos Ω, ⎪ Reff ⎨ ⎪⎩ RS = cos Ω ,. in the tangential plane, in the Sagittal plane,. (4.25). 4.3 格林(J. M. Greene)殘數方法. 非共平面 環形共振腔無法用一般的 ABCD 矩陣來描述其動態行 為,然而它卻可藉由高斯光束在共振腔內的行進,碰到球面鏡時的相位. 移動(phase shift)以及每經過一次鏡子反射之後描述高斯光束行進的座 標系統有一個座標旋轉變換,吾人可以設計一個程式讓高斯光束在共振 腔內來回多次再入射行進一整圈,並滿足自我協調的條件(self-consistent condition) 來計算高斯光束在經過 n 次一整圈並達到穩定時的光束參 數-q (q parameter)。藉由光束參數-q 可以得到共振腔達到穩定時的光腰 50.
(63) 尺寸大小以及曲率半徑。為了要進一步了解共振腔的穩定性,吾人可以 針對高斯光束的 光腰尺寸 以及曲率半徑建立一個 2 維的 疊代映象 (2-dimensional iterative map)。[70-72]藉此疊代映象的雅哥比矩陣(Jacobian matrix)求出其殘數(residue),來描述其穩定性。[73-75]當共振腔達到穩定 時,即為共振腔在自我協調的條件下光束參數-q 的解。此解相當於在 2 維的疊代映象中光束經過第 n 次一整圈之後與經過第 n+1 次一整圈之 後的值相等的條件。下面將說明描述共振腔的穩定性的疊代映象的殘數 方法。 茲考慮共振腔內 s 維動態系統,其狀態向量表為 x = ( x1 , x2 ,..., x s ) ,經 過第 n 次一整圈之後的狀態向量表為 x n ,而第 n+1 次一整圈之後的狀 態向量 x n +1 可以經由 x n +1 = F (x n ) 來描述。在共振腔達到穩定時,則存在 一狀態向量 x 0 滿足 x 0 = F (x 0 ). (4.26). 此狀態向量 x 0 稱為固定點(fixed point)。經由線性化處理[74,75],在固定點 做一個微擾(perturbation) 吾人可以研究(4.26)式經過線性化之後的穩定 性。設 δx 0 為一個微擾量 δx n = x n − x 0 = F (x n −1 ) − F (x 0 ) = ∇F (x n −1 ) • (x n −1 − x 0 ) + higer order terms. (4.27). 在考慮穩定點的線性化之後可得 δx n = ( J x ) n • δx 0 0. 51. (4.28).
(64) 其中. J x0. ⎡ ∂f1 ⎢ ∂x ⎢ 1 = ⎢ ... ⎢ ∂f s ⎢ ∂x1 ⎣. ∂f1 ⎤ ∂x s ⎥ ⎥ ... ... ⎥ ∂f s ⎥ ... ∂x s ⎥ ⎦ x =x 0 .... (4.29). 上 式 稱 為 雅 哥 比 矩 陣 (Jacobian matrix) 。 解 此 矩 陣 的 特 徵 方 程 式 (eigenvalue equation) J μ= λ μ,可得 s 個獨立的特徵向量(eigenvector) μk , ( k = 1, 2, ..., s ) ,其特徵值(eigenvalue) 為 λ k 。 δx 0 可以表為此 s 個獨立. 的特徵向量μk 的線性組合 s. s. k =1. k =1. s. δx n = ( J x ) n ∑ c kμk = ∑ c k ( J x ) nμk = ∑ c k λ k n μk 0. 0. (4.30). k =1. 由上式可發現當 n → ∞, λk < 1 時,對所有的 k 值 δx n 是收斂的,亦即,此 系統是穩定的。因此,由特徵值的絕對值之大小可以用來判斷系統的穩 定。我們共振腔所處理的 2 維的疊代映象為 ω n +1 = f (ω n , Rn ). , ω n 為經過 n 次一整圈後的光腰尺寸. Rn +1 = g (ω n , Rn ). , Rn 為經過 n 次一整圈後的曲率半徑. 在穩定狀態時的雅哥比矩陣為. 52.
(65) ⎡ ∂f ⎢ J = ⎢ ∂ω ∂g ⎢ ⎣ ∂ω. ∂f ⎤ ∂R ⎥ ∂g ⎥ ⎥ ∂R ⎦ ω=ω0 ,R = R0. (4.31). 由於我們所考慮的共振腔是屬於無損耗共振腔系統,此系統的漢米耳頓 (Hamiltonian) 與 時 間 無 關 , 其 2 維 的 疊 代 映 象 是 屬 於 保 守 映 象 (conservative map),滿足其在 相位空間 (phase space)的 面積恆定 性質 (area-preserving)的要求,其雅哥比矩陣的行列式恆等於 1,亦即[76-78] J =1. (4.32). ∂f ∂f ∂ω ∂f ∂R = + ∂n ∂ω ∂n ∂R ∂n. (4.33). ∂g ∂g ∂ω ∂g ∂R = + ∂n ∂ω ∂n ∂R ∂n. (4.34). 今利用. 以及經由一個微小量的側移 l ∂f ∂f ∂ω ∂f ∂R = + ∂l ∂ω ∂l ∂R ∂l ∂g ∂g ∂ω ∂g ∂R = + ∂l ∂ω ∂l ∂R ∂l. (4.35) (4.36). 由 (4.33) 至 (4.36) 式 可 以 得 到 此 雅 哥 比 矩 陣 J 。 今 由 其 特 徵 方 程 式 J μ− λ μ= 0 的行列式為零. 53.
(66) ∂f −λ ∂ω ∂g ∂ω. ∂f ∂R = 0 ∂g −λ ∂R. (4.37). 以及 ∂f ∂g + ∂ω ∂R. Tr ( J ) =. (4.38). 可得 λ 2 − λTr(J) + 1 = 0. (4.39). 上式的根有兩種形式,其一為大小為 1 的共軛複數對 λ1, 2 = e ± iσ ,另一 為實數的 λ 與 1λ 。後者對應於不穩定的情形,因為其中有一根的值大於 1 。前者對應於穩定的情形,亦即 Tr ( J ) = 2 cos σ. Tr ( J ) < 2. ,. (4.40). 又殘數等值於 Tr ( J ) ,其定義為 Res =. 1 {2 − Tr ( J )} 4. (4.41). 由於 Tr ( J ) = 2 cos σ ,因此, σ. Res = sin 2 ( ) 2. (4.42). 穩定的情況為 0 < Res < 1 ,而不穩定的情況為 Res < 0 或 Res > 1 。我們 知道共振腔中雷射縱模與橫模彼此之間是會互相影響的。在腔長為 L 的 共振腔中,如果定義縱模的頻率間隔為 υ l υt =. υl cos −1 g 1 g 2 π. =. c 2L. ,則 g1 g 2 = 0 or 1 與 g1 g 2 = 1 對應於 υ t. 1 − 簡併態(degenerate 4. 2. υl. =. ,橫模的頻率間隔為 1 2. 與 υt υl. =. 1 ,稱為 1 2 − 與 4. configuration)。由格林的殘數理論可知道,特殊的. Res = 0 與 Res = 1 分別對應於 g1 g 2 = 0 or 1 與 g1 g 2 = 1 2 ,它們稱為低階共振. 54.
(67) (low order resonance),它們會造成共振腔的不穩定。[79,80] 現在首先來考慮兩個曲率半徑分別為 ρ1 及 ρ 2 ,腔長為 L 的線形球 面共振腔。當高斯光束在共振腔內來回行進時,光束參數-q 的變換可用 ABCD 矩陣來表示。假設高斯光束由左邊曲率半徑為 ρ1 的球面鏡出 發,當光束行進一整圈再回到原出發點時,其 ABCD 矩陣為 1 0⎤ 1 ⎡A B⎤ ⎡ 2 ⎡ ⎢ ⎥⎢ = ⎢C D ⎥ 1⎥ 0 − ⎣ ⎦ ⎢⎣ ρ1 ⎦⎣ ⎡ 2L 1− ⎢ ρ2 =⎢ 4 L 2 ⎢ − − ⎢ρ ρ ρ 1 2 1 ⎣. L⎤ ⎡ 1 ⎢ 2 1 ⎥⎦ ⎢− ρ 2 ⎣. 0⎤ 1 L ⎡ ⎤ ⎥⎢ 1⎥ 0 1 ⎥ ⎦ ⎦⎣. ⎤ ⎥ ρ2 ⎥ 2 L 4 L 4 L2 ⎥ − + 1− ρ 2 ρ1 ρ 1 ρ 2 ⎥⎦ 2L −. 2. ρ2. 2 L2. (4.43). 設第 n 圈的光束參數為 q n,第 n+1 圈的光束參數為 q n +1,由於 A, B, C, D 為實數,今由 q n +1 =. Aq n + B 可得 Cq n + D. ω n +1 = ω n ( A + B / Rn ) 2 + (λ /(πω n 2 )) 2 B 2 = f (ω n , Rn ) ( A + B / Rn ) 2 + (λ /(πω n ) 2 B 2 2. Rn +1 =. ( A + B / Rn )(C + D / Rn ) + (λ /(πω n ) 2 BD 2. Tr ( J ) = 4( A +. B. ρ1. )2 − 2 =. Res = 1 − ( A +. 其中 g1 = 1 −. L. ρ1. , g2 = 1−. L. ρ2. B. ρ1. 2L. ρ1. − (1 −. 2L. ρ1. = g (ω n , Rn ). )(1 −. ) 2 = 1 − ( 2 g 1 g 2 − 1) 2. 2L. ρ2. ). (4.44) (4.45). (4.46). (4.47). 。 經由(4.47)式所求出的殘數為根據 ABCD 55.
數據

![圖 2.2 三面鏡子組成的環形共振腔 圖 2.3 四面鏡子組成的環形共振腔 光在傳統由三面或四面鏡片所組成的環形共振腔內是以共平面的 8 字形或是三角形方式行進,相較一般線型共振腔,環形共振腔的光學元 件較多、體積較大、設計較複雜。直到立體 8 字形環形共振腔的發現, 打破了傳統雷射環形共振腔至少必須使用三片面鏡的設計。立體 8 字形 的共振腔是由二片面鏡及一個增益介質組成,如圖 2.4 所示。 [15]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8893302.256097/21.892.151.720.150.330/三面鏡子四面鏡子傳統由較一般線多體積較大設計較複雜及一個增益.webp)

+4

相關文件
– The The readLine readLine method is the same method used to read method is the same method used to read from the keyboard, but in this case it would read from a
bility of the mobile system is the same as the call blocking For example, for a hexagonal planar layout with reuse dis- probability in a cell, Because traffic in
Valor acrescentado bruto : Receitas do jogo e dos serviços relacionados menos compras de bens e serviços para venda, menos comissões pagas menos despesas de ofertas a clientes
The mean free path is very large compared to the substrate to source distance, so that the transport of the vapor stream is collisionless.
Promote project learning, mathematical modeling, and problem-based learning to strengthen the ability to integrate and apply knowledge and skills, and make. calculated
In this regard, GAMS welcomes the WSC's self-assessment work with a view to enhancing mutual understanding and cooperation, and invites the WSC’s further work on the
The question of whether every Cauchy sequence in a given inner product space must converge is very important, just as it is in a metric or normed space.. We give the following name
9. The IEEE standard only requires that the extended precision format contain more bits than the double precision format... ing very common, it is still possible that you may need
