行政院國家科學委員會專題研究計畫 期中進度報告
次世代高效率電動車驅動與控制系統研究(2/3)
期中進度報告(精簡版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 99-2218-E-009-003- 執 行 期 間 : 99 年 10 月 01 日至 100 年 09 月 30 日 執 行 單 位 : 國立交通大學機械工程學系(所) 計 畫 主 持 人 : 成維華 共 同 主 持 人 : 張翼、陳宗麟、鄭泗東、楊秉祥、陳坤明 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 100 年 09 月 23 日
國科會工程處 「民生系統之節能技術研發專案計畫」
次世代高效率電動車驅動與控制系統研究期中報告
計畫架構
總計畫: 次世代高效率電 動車驅動與控制 系統研究 子題一:LDMOS 與 GaN HEMT 功 率晶體研發 驅動功率模 組與控制晶 片 200V-600V 高功率 LDMOS 設計 與散熱特性分析 耐高壓 300W AlGaN/GaN 功率電 晶體製作 權重:100% 子計畫主持人: 張翼教授 陳坤明 博士 權重:(33%) 陳坤明 博士,權重:16 % 子題二:功率電晶體驅動與 DC-DC 轉換線路的節能電路 子題主持人:陳宗麟 副教授 權重:16 % 子題三:電動馬達驅動於電動自 行車應用的驗證與整合 子題主持人:鄭泗東 助理教授 權重:17 % 權重:(33%) 主持人:成維華教授 (33%) 嵌入式電動自 行車控制平台 權重:(34%) 張翼教授,權重:17 % 子題四:電動自行車之馬達、發 電機、運動控制模式 子題主持人:成維華 教授 權重:17 % 子題五:節能與動力控制技術對 使用者運動效能之研究 子題主持人:楊秉祥 助理教授 權重:17 %相關研究子題
項 目 名 稱 負責之主持人或共同主持人 服務機構/系所 職 稱 子計畫之屬性 總計畫 次世代高效率電能轉換晶片與應 用平台研究 成維華 國立交通大學 機械系 教授子題一 LDMOS 與 GaN HEMT 功率晶體 研發 張翼 陳坤明 國立交通大學 材料系/國家奈米元 件實驗室 教授 □ 機電整合節能方案。 □ 系統內關鍵零組件或功 率晶體之開發。 □ 智慧型節能技術。 □ 整合控制晶片與功率晶 體之設計平台。 □ 其他與節能技術相關 項目: 子題二 功率電晶體驅動與 DC-DC 轉換 線路的節能電路 陳宗麟 國立交通大學 機械系 副教授 □ 機電整合節能方案。 □ 系統內關鍵零組件或功 率晶體之開發。 □ 智慧型節能技術。 □ 整合控制晶片與功率晶 體之設計平台。 □ 其他與節能技術相關 項目: 子題三 電動馬達驅動於電動自行車應用 的驗證與整合 鄭泗東 國立交通大學 機械系 助理教授 □ 機電整合節能方案。 □ 系統內關鍵零組件或功 率晶體之開發。 □ 智慧型節能技術。 □ 整合控制晶片與功率晶 體之設計平台。 □ 其他與節能技術相關 項目: 子題四 電動自行車之馬達、發電機、運 動控制模式 成維華 國立交通大學 機械系 教授 □ 機電整合節能方案。 □ 系統內關鍵零組件或功 率晶體之開發。 □ 智慧型節能技術。 □ 整合控制晶片與功率晶 體之設計平台。 □ 其他與節能技術相關 項目: 子題五 節能與動力控制技術對使用者運 動效能之研究 楊秉祥 國立交通大學 機械系 助理教授 □ 機電整合節能方案。 □ 系統內關鍵零組件或功 率晶體之開發。 □ 智慧型節能技術。 □ 整合控制晶片與功率晶 體之設計平台。 □ 其他與節能技術相關 項目:
子題一:LDMOS 與 GaN HEMT 功率電晶體研發 主持人:張翼 教授、陳坤明 博士 研究人員:顏玄德 1. 研究目的 功率電晶體為各項電子產品中不可或 缺的關鍵零組件,若能有效提升功率電晶體 之效率與降低耗電量,對節能電子產品之開 發有極大之助益。在功率電晶體中,橫向擴 散 金 氧 半 場 效 電 晶 體 (Lateral Double-diffused MOS, LDMOS) [1]-[3]與氮 化鎵高電子遷移率電晶體(GaN HEMTs)皆 為極具發展價值的功率電晶體。 目前國內產業的 LDMOS 製程多以 3C 應用為主,因此元件的耐電壓及單位功率密 度相對較低。對固定之輸出阻抗,LDMOS 之輸出功率可正比於輸出電壓之平方。目前 聯 華 電 子 公 司 (UMC) 所 研 究 生 產 之 LDMOS 已可提供至 600V 之崩潰電壓,惟 其所能達成之功率仍不足(< 20W)。基於不 增加製程複雜度的原則下,本計畫以改進元 件佈局(layout)結構之方式,來降低導通電阻 (on resistance)與增加散熱效率,進而降低功 率損耗,並提高輸出功率。配合整體計畫電 動自行車之研發,第 2 年度以開發較低導通 電阻的 600V LDMOS 功率電晶體為目標, 並發展 600V LDMOS 的元件模型。 2. 研究方法 橫向擴散金氧半場效電晶體技術 首先設計不同的 LDMOS 元件佈局,來 降低導通電阻及功率損耗,並分析 LDMOS 的各項電子特性,接著發展 600V LDMOS 的元件模型,以供電路設計使用。 A. 600V LDMOS 元件設計 元件設計之準則,在於維持 600V 的崩 潰 電 壓 條 件 下 , 改 善 元 件 的 轉 導 (transconductance) 與 汲 極 電 阻 (drain resistance),使電流密度提升,為了易於分 析元件電性參數與佈局之關係,元件尺寸大 小之訂定,以維持輸出電流在 100 mA 左 右。一般功率電晶體的佈局結構大多採用多 指形(multi-finger)並聯的方法來降低閘極電 阻(gate resistance),以提升速度;另外,此 種 設 計 方 法 也能 增 加輸 出 功 率 和 散熱 效 率。然而尖端電場的擁擠效應使此種結構的 崩潰電壓較低,僅適用於 200 V 以下的電晶 體佈局設計。因此,本計畫的佈局結構設計 以圓環形(ring)與跑道形(race track)結構為 主[4][5],如圖 1 所示。另外,因應電路之 應用,low side 與 high side 元件結構也一併 納入(如圖 2)。除了元件之外,測試鍵(test key)的各項功能也是我們注意的重點,test key 主要賦予測量接觸電阻、閘極片電阻、 源/汲極片電阻、接面漏電、及閘極電容的 能力,以增加分析元件特性的能力,並協助 等效電路模型參數的萃取。 (a) (b)
圖 1 LDMOS 佈局結構:(a) ring、 (b) race track
(a)
(b)
圖 2 LDMOS 剖面圖:(a) low side 元件、 (b) high side 元件
B. 600V LDMOS 元件測試
流參數量測系統量測元件的直流特性,根據 量測結果,我們可以萃取各項基本電性參 數,如:轉導,臨界電壓(threshold voltage)、 導通電阻,崩潰電壓…等,以建立元件佈局 和製程參數與各項電性參數之關係,藉以評 估最佳的元件設計方法。 C. 600V LDMOS 元件模型建立 相較於一般的 MOSFET,LDMOS 模型 最大的問題乃在於漂移區(drift region)所引 起的 quasi-saturation effect,即汲極電流在高 閘極電壓時會被壓抑住,乃因漂移區的載子 (carrier)已達速度飽和。quasi-saturation effect 同樣會影響元件的電容特性,使閘極電容會 有一個超過閘極氧化層(gate oxide)電容的 峰值。因此,LDMOS 模型可以分成通道區 (channel)與漂移區,如圖 3 所示 ,通道區 部分採用 surface-potential-based model 方法 建立汲極電流與閘極電容等模型[6]。在漂移 區 部 分 則 推 導出 一 個電 壓 相 依 電 流源 公 式,以增加模型準確度。 600V LDMOS 元件模型將以第 1 年度 建立的 200V LDMOS 元件模型為基礎,重 新 修 正 漂 移 區的 電 流 公 式 , 使 模 擬出 的 quasi-saturation effect 與電容-電壓特性更符 合物理意義。在閘極氧化層下之漂移區電流 (drift current)部分沿用去年的模型。在場氧 化 層 (field oxide) 下 的 漂 移 區 部 分 , 則 將 JFET 電流公式改用 A. Tanaka [7]所提出的 方法,以提高模型準確度,其表示式如下: dr DDi dr ov dx L V n q x W I 其中 xov為電子由閘極氧化層下之漂移區注 入 場 氧 化 層 下之 漂 移區 時 的 起 始 等效 厚 度,其中考量了閘極場板(field plate)控制的 空乏層及 p-n 接面空乏層的影響,為偏壓的 函數。μdr 為漂移區內的等效電子遷移率 (mobility),包含了電子速度飽和效應。n 為 漂移區內的電子濃度,會隨電子遷移率的下 降 而 上 升 , 所 以 可 以 表 示 為
dr
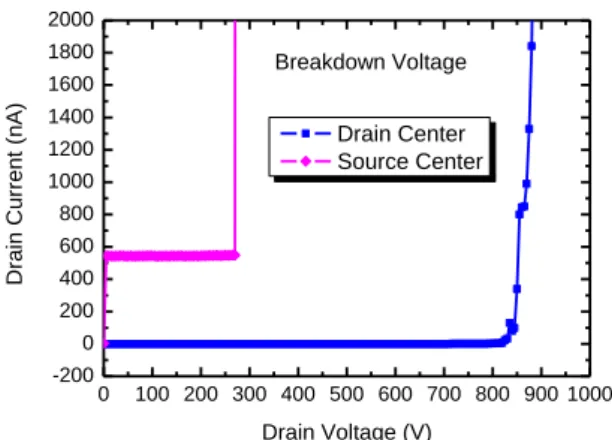
dr A N n 1 0 。Ndr, Ldr, VDDi分別為 場氧化層下之漂移區的摻雜濃度、長度及電 壓差。 圖 3 LDMOS 模型示意圖 3. 結果與討論 橫向擴散金氧半場效電晶體技術 圖 4 為圓環形 LDMOS 的量測特性,其 low side 與 high side 元件的崩潰電壓分別為 710 V 與 825 V,於閘極電壓 VGS=12 V 時所 萃取出的導通電阻(RON)分別為 1.09 與 0.92 Ω·cm2。此種結構為 UMC 所提供的標準佈 局設計。 (a) (b) 圖 4 圓環形 LDMOS 之(a)輸出特性與(b)崩 潰電壓 0 20 40 60 80 100 120 140 160 180 200 0 4 8 12 16 20 24 28 VGS=9-12 V V GS=8 V V GS=7 V VGS=6 V V GS=5 V V GS=4 V D rai n C ur rent ( m A) Drain Voltage (V) Low Side V GS=3 V 0 100 200 300 400 500 600 700 800 900 1000 -1 0 1 2 3 4 5 6 7 8 9 10 Low Side High Side D rai n C ur rent ( nA ) Drain Voltage (V) Breakdown Voltage0 1 2 3 4 5 6 7 8 9 10 11 12 0 5 10 15 20 25 VDS=1, 5, 20, 50, 100, 200 V Measured Data Model Data D rai n C ur rent ( A) Gate Voltage (V) W=700 m 0 20 40 60 80 100 120 140 160 180 200 0 5 10 15 20 25 30 Measured Data Model Data D ar in C ur rent ( m A) Drain Voltage (V) VGS=3-12 V 圖 5 不同佈局設計的跑道形 LDMOS 的崩 潰電壓 (a) (b)
圖 6 採用跑道形佈局的(a) low side 與(b) high side 元件之直流輸出特性 當電路應用需要較大電流時,必頇將數 個圓環形元件並連在一起;此時,連接汲極 端的高壓線將跨過漂移區及源極區,降低元 件性能。因此,本計畫採用跑道形結構來增 加元件通道寬度,並獲得較大的電流,此種 結構的面積亦比數個圓環形元件並連的佈 局面積要小。跑道形結構可將汲極置於中 央,源極置於外圈;另外,也可將源極置於 中央,汲極置於外圈。圖 5 比較此兩種佈局 方式的崩潰電壓,其中將源極置於中央的方 法,因有較嚴重的電場擁擠效應問題,其崩 潰電壓不到 300 V。因此,未來的電路應用 上,將採用汲極置於中央的佈局設計。 圖 6 為跑道形元件的輸出特性,在不影 響崩潰電壓的情形下,汲極電流已經達到 100 mA 以上,low side 與 high side 元件的 導通電阻分別為 0.94 與 0.75 Ω·cm2,比圓環 形元件降低許多,乃因跑道形佈局方式比圓 環形佈局能更有效地利用面積。 最後,我們由所量測到的元件特性萃取 出圖 3 的模型參數,圖 7 比較元件的直流量 測 與 模 型 模 擬結 果 ,可 知 我 們 所 建立 的 LDMOS 模型可以準確地模擬出元件的特 性,此模型的建立可以協助未來馬達驅動電 路的設計。 (a) (b) 圖 7 LDMOS 的直流量測與模型特性比較 0 100 200 300 400 500 600 700 800 900 1000 -200 0 200 400 600 800 1000 1200 1400 1600 1800 2000 Drain Center Source Center D rai n C ur rent ( nA ) Drain Voltage (V) Breakdown Voltage 0 20 40 60 80 100 0 20 40 60 80 100 120 140 160 Race Track VGS=9-12 V V GS=8 V V GS=7 V VGS=6 V VGS=5 V VGS=4 V D rai n C ur rent ( m A) Drain Voltage (V) Low Side VGS=3 V 0 20 40 60 80 100 0 20 40 60 80 100 120 140 160 Race Track VGS=9-12 V VGS=8 V V GS=7 V VGS=6 V VGS=5 V VGS=4 V D rai n C ur rent ( m A) Drain Voltage (V) High-Side VGS=3 V
4. 結論 本計畫已完成 600V LDMOS 的設計與 模型技術研發,我們利用跑道形佈局的設計 取代數個圓環形元件並聯的方式,來獲得 100 mA 以上的汲極電流。同時,跑道形元 件因有較佳的面積使用率,其導通電阻也低 於圓環形元件。跑道形佈局的 low side 與 high side 元件之崩潰電壓分別為 710 V 與 825 V,導通電阻則分別為 0.94 與 0.75 Ω·cm2 。另外,在模型方面,元件的通道區 與 漂 移 區 的 電流 與 電荷 公 式 推 導 皆已 完 成,並已完成模型參數萃取與模擬,模擬結 果相當符合量測結果,可以提供未來電路設 計使用。 5. 參考文獻
[1] A. W. Ludikhuize, “A versatile 250/300-V IC process for analog and switching applications”, IEEE Trans. Electron Devices, vol. 33, no. 12, pp. 2008-2015, 1986.
[2] T. R. Efland, C. Y. Tsai et al., “Lateral thinking about power devices”, IEDM Tech. Dig., 1998, p. 679-682.
[3] B. J. Baliga, “An overview of smart power technology,” IEEE Trans. Electron Devices, vol. 38, no. 7, pp. 1568-1575, 1991.
[4] Z. Hossain, M. Imam et al., “Double-RESURF 700V n-channel LDMOS with best-in-class on-resistance”, in Proc. Power Semiconductor Devices and ICs Symp., 2002, p. 137-140.
[5] H. H. Hu, K. M. Chen et al., “Characterization of RF lateral-diffused metal-oxide-semiconductor field-effect transistors with different layout structures”, Jpn. J. Appl. Phys., vol. 46, no. 4B, pp. 2032-2036, 2007.
[6] A. Aarts, N. D’Halleweyn et al., “A surface-potential-based high-voltage
compact LDMOS transistor model,” IEEE Trans. Electron Devices, vol. 52, no. 5, pp. 999-1007, 2005.
[7] A. Tanaka, Y. Oritsuki et al., “Quasi-2- dimensional compact resistor model for the drift region in high-voltage LDMOS devices,” IEEE Trans. Electron Devices, vol. 58, no. 7, pp. 2072-2080, 2011. 第二部分:GaN HEMT 功率晶體研發 1. 研究目的 耐高壓功率晶體為本計畫功率轉換器 中重要之晶體元件, AlGaN/GaN 氮化物晶 體結構擁有獨特的極化效應,因此具有高電 子濃度,可輸出高電流密度。此外,由於 GaN 為寬能隙半導體,因此氮化物晶體結構 具有高崩潰電壓。整體而言,氮化物晶體結 構具有極高之輸出功率。本年度目標分為兩 部份,第一部分為矽基板上高耐壓氮化鋁鎵 氮化鎵(AlGaN/GaN)異質接面磊晶結構成 長;第二部份為 AlGaN/GaN 功率電晶體製 作,利用元件佈局調變閘極-汲極距離(G-D spacing),探討崩潰電壓與電流之關係。此 外,在元件功率效能上,本年度高耐壓元件 功率規格已達 1kW。 2. 研究方法 Ⅰ. 氮化鎵矽基板上高耐壓 AlGaN/GaN 異 質接面磊晶結構成長: 在矽基板上成長緩衝層以利成長高品 質之氮化鎵磊晶。緩衝層結構包括高溫氮化 鋁,低溫氮化鋁,漸變的氮化鋁鎵。接著, 在緩衝層上成長氮化鎵與氮化鋁鎵結構,並 進一步提升耐壓與電流攜帶能力。 Ⅱ. AlGaN/GaN 功率電晶體製作: AlGaN/GaN 功率電晶體製程,其中包 括元件阻隔,歐姆接觸形成,閘極定義,元 件保護層以及空氣橋的搭蓋等步驟。本年度 工作項目,為改變元件佈局,調變閘極-汲 極距離,提升元件之崩潰電壓,並探討其電 流變化關係。圖一為 AlGaN/GaN 晶體結
AlxGa1-xN GaN S G D LGD 構, LGD 為閘極-汲極距離,調變參數為 LGD=20, 40, 60, 120 um。圖二為 LGD=20 與 120 um 之元件佈局示意圖。 圖一 AlGaN/GaN 晶體結構 (a) (b) 圖二 (a) LGD=20 um 與(b) LGD=120 um 之 晶體佈局圖 3. 結果與討論 (1) 最佳化氮化鋁鎵氮化鎵結構成長條件 利用緩衝層的調變,可在矽基板上成長 厚度達 1.2 um 無裂痕之氮化鎵結構,如三 所示。 圖三 1.2 um AlGaN/GaN 磊晶結構 GaN (002)及 GaN (102)的 X 光繞射分析 (XRD) 分 析 如 圖 四 所 示 , GaN (002) 的 FWHM of 為 572.4 arcsec,GaN (102) 的 FWHM 為 615.7 arcsec。缺陷密度約為 108 cm-2。 (a) (b)
圖四 (a) GaN (002)及(b) GaN (102)的 XRD 分析 (2) 研究閘極與汲極距離的調變對於崩潰電 壓與電流之影響 調變閘極與汲極距離,崩潰電壓的變化 關係如圖五所示。崩潰電壓隨著 S/D 距離增 加而增大,閘極與汲極距離為 120um 時, 崩潰電壓可達 845V。
0 200 400 600 800 1000 0.0 0.2 0.4 0.6 0.8 1.0 1.2 Vd (V) Id (m A /m m ) 120um 60um 40um 20um GaN HEMT Off State 圖五 崩潰電壓隨著閘極與汲極距離之變化 關係 崩潰電壓與電流隨著閘極與汲極距離 之變化關係如圖六所示,輸出電流隨著 S/D 距離增加而減少,在 S/D 距離為 120um 時, 電流密度仍可達 125mA/mm,預期元件尺寸 提升至 20mm 時,輸出電流可>1A。 圖六 崩潰電壓與電流隨著閘極與汲極距離 之變化關係。 (3) 氮化鎵功率元件 本 年 度 元 件 效 能 已 達 1kW(400V, 2.5A),已達到 60W 之年度目標。元件閘極 長度為 2um,寬度為 20mm,閘極-汲極距離 為 20um,下年度將會調整閘極-汲極及加上 電場板,進一步製作高崩潰電壓之大電流功 率晶體。 4. 結論 GaN HEMT 功率晶體本年度成果,已 可在矽基板上成長厚度達 1.2 um 無裂痕之 氮化鎵結構,調變閘極與汲極距離之變化關 係,可使崩潰電壓可達 845V。元件功率效 能方面,晶體功率已達 1kW,下年度將進一 步將晶體結構 (閘極-汲極與電場板 )最佳 化,開發更高功率之氮化鎵功率晶體。 5. 參考文獻
[1] U.K. Mishra , P. Parikh, Y.F. Wu,” AlGaN/GaN HEMTs: An overview of device operation and applications,” Proceedings of the IEEE, vol. 90, pp. 1-16, 2002.
[2] M. A. Khan, J. N. Kuznia, A. Bhattarai and D. T. Olson, “Metal Semiconductor Field Effect Transistor on single crystal GaN,” Appl. Phys. Lett, vol. 62, pp. 1786-1787, 1986.
[3] Lester F. Eastman and U.K. Mishra, “The toughest transistor yet [GaN transistors],” IEEE SPECTRUM, vol. 39, pp. 28-33, May 2002.
[4] [4] Fabio Sacconi, Aldo Di Carlo, P. Lugli, and Hadis Morkoç, “Spontaneous and Piezoelectric Polarization Effects on the Output Characteristics of AlGaN/GaN Heterojunction Modulation Doped FETs,” IEEE Transactions on electron devices, vol. 48, pp. 450-457, 2001.
[5] O. Ambacher, J. Smart, J. R. Shealy, N. G. Weimann, K. Chu, M. Murphy, W. J. Schaff, and L. F. Eastman,” Two-dimensional electron gases induced by spontaneous and piezoelectric polarization charges in N- and Ga-face AlGaN/GaN heterostructures,” Journal of Applied Physics, vol. 85, pp. 334-344, 1999.
[6] S. R. Lee, D. D. Koleske, K. C. Cross, J. A. Floro, and K. E. Waldrip Sandia, “In situ measurements of the critical 845V
thickness for strain relaxation in AlGaN/GaN heterostructures,” Appl. Phys. Lett, vol. 85, pp. 6164-6166, 2004. [7] Jane J. Xu, Stacia Keller, Gia Parish,
Sten Heikman, Umesh K. Mishra, and Robert A. York, “A 3–10-GHz GaN-Based Flip-Chip Integrated Broad-Band Power Amplifier,” IEEE Transactions on Microwave Theory and Techniques,vol. 48, pp. 3573-2578, 2000. [8] Y. F. Wu, D. Kapolnek, J. P. Ibbetson, P. Parikh, B. P Keller, and U. K. Mishra, “Very –high power density AlGaN-GaN HEMTs,” IEEE Trans. Electron Devices, vol. 48, pp. 586-590, 2001.
[9] S. T. Sheppard, K. Doverspike, W. L. Pribble, S. T. Allen, and J. W. Palmour, “High power microwave GaN-AlGaN HEMTs on silicon carbide,” IEEE Electron Device Letter, vol. 20, pp. 161-163, 1999. 子題二:功率電晶體驅動與 DC-DC 轉換線 路的節能電路 主持人:陳宗麟教授 1. 研究目的 近年來矽材料功率元件的發展已經到 達材料極限,新一代的寬能隙材料 (wide bandgap)如氮化鎵(GaN)或碳化矽(SiC)皆有 取而代之的趨勢,因為氮化鎵有低導通電阻 和高電子遷移率 (high-electron mobility)的 優勢,且其耐高壓高溫的特性,都極適合大 功率的開關應用上。尤其近年來功率元件發 展之趨勢在於「智慧型高效能整合性功率模 組之開發」,藉由將驅動電路、保護電路集 結在單一功率晶片模組上,使其達到高功 率、高穩定性的需求。 為了設計出符合高功率的功率晶片,本 研究是針對氮化鎵材質之功率電晶體設計 其閘極驅動電路,使其形成整合型驅動功率 晶片,且由於氮化鎵裝置是 AlGaN/GaN 高 電子遷移率電晶體,HEMT 具有優越切換特 質與高電場的操作能力,能夠使整體設計出 的功率晶片更節能。 2. 研究方法 本研究設計的閘極驅動電路圖如下,圖 一為下橋閘極驅動電路,圖二則為上橋閘極 驅動電路: 圖一、下橋閘極驅動電路 由上圖可以看出此驅動電路與一般閘 極驅動電路最大的差異就是增加了電容 C2 和二極體 D2,目的就是要提供負的閘-源極 電壓差給氮化鎵功率電晶體。當 M1 導通 (turn-on)、M2 關閉(turn-off)時,電壓源 VCC 會經由電晶體 M1、電容 C2 和二極體 D2 的 迴路對 C2 充電,所以 C2 就會有一個 VCC 的跨壓。此時下橋功率電晶體(Mbottom)的 Vgs 極 為 二 極 體 D2 的 正 向 電 壓 降 (forward voltage drop),如此便可使下橋功率電晶體 導通。 當 M1 關閉、M2 導通時,電容 C2 的正 極電壓約等於 0V,因為在上一個操作時 C2 已經有 VCC的跨壓,所以當電容的正極電壓 為 0V 時,負及電壓極為 –VCC,所以只要 設定電壓源 VCC 大於下橋功率電晶體的臨 界電壓(threshold voltage)即可將功率電晶體 關閉。
圖二、上橋閘極驅動電路 上橋閘極驅動電路與下橋閘極驅動電 路一樣,都是藉由電容 C2 提供負的閘-源極 電壓差來切換功率電晶體的開跟關。 但上橋功率電晶體(Mtop)的源極電壓並 非固定值,而會隨著功率電晶體的導通與否 有所變化,本研究使用自舉式電路(bootstrap circuit)來解決這個問題。此自舉式電路包含 二極體 D1 和電容 C1,一開始電壓源 VCC 會先經由 D1 對自舉式電容 C1 充電使其有 一個跨壓 VCC。當上橋功率電晶體導通時, 其源極電壓約等於 VDD,由於自舉式電容的 跨壓 為 VCC,所 以 C2 的正極 電壓即為 VDD+VCC,利用此種方式來穩定提供上橋功 率電晶體需要的電壓。 為了利用 0~5V 的驅動訊號來控制上橋 驅動電路,還需要在控制訊號的後面加上一 個電壓轉換器(voltage level shifter),將 0~5V 的 訊 號 轉 換 成 0~VDD 的 訊 號 (VDD 可 為 24V、100V 甚至更高)來控制上橋驅動電路 的開關切換。 因為空乏型電晶體在 Vgs等於 0V 時即 可導通的特性,會使 Vout 一開始就約等於 VDD,自舉式電容的正極電壓也會約等於 VDD,如此電壓源 VCC就無法藉由二極體 D1 對 C1 充電,自然整個上橋電路就無法正常 運作。 為了使整個上橋閘極驅動電路可以正 常運作,還需要加上一個啟動電路(start-up circuit)。如圖二所示,此啟動電路由一個 NMOS 和 一個 電壓 轉換 器 所組 成, 而 此 NMOS 的源極則接在負電壓源 VSS 上。於 一開始時,提供一個訊號使此 NMOS 導通, 使 上 橋 功 率 電 晶 體 的 閘 極 電 壓 約 等 於 VSS,此時便可將功率電晶體關閉,電壓源 VCC也可對自舉式電容 C2 充電,於是整個 驅動電路便可正常運作。 3. 結果與討論 此電路經由 SPICE 電路模擬軟體驗證的結 果如下圖: 圖三、下橋閘極驅動電路的波形 圖三所示的波形依序為下橋的控制訊 號、功率元件的閘-源極電壓差和輸出訊 號,由圖中看出可用 5V 的輸入訊號控制 24V 的輸出,且操作頻率為 100kHz。 圖四、上橋閘極驅動電路的控制訊號
圖五、上橋閘極驅動電路的波形 上橋閘極驅動電路的波形分別為圖四 和圖五,圖四是上橋的的控制訊號,圖五的 波形則依序是上橋功率元件的閘-源極電壓 差及輸出訊號,縱軸單位是伏特,橫軸單位 是秒。圖樣可利用 5 伏的控制訊號可控制 24 伏的輸出,且操作頻率可達 100kHz。 此閘極驅動電路的實驗結果如圖六和 圖七所示: 圖六、下橋閘極驅動電路的實驗波形 圖七、上橋閘極驅動電路的實驗波形 4. 結論 從實驗結果可以明顯看出,本研究所提 出的閘極驅動電路確實可以控制氮化鎵電 晶 體 的 開 關 切 換 , 且 其 操 作 頻 率 可 達 100kHz,操作電壓也可達到 24V。 5. 參考文獻
[1] Mihaila, F. Udrea, R. Azar and G. Brezeanu, “Analysis of Static and Dynamic Behavior of SiC and Si Devices Connected in Cascode Configuration ”, Semiconductor Conference, 2001. CAS 2001 Proceedings. International
[2] Bo Yang, Jason Zhang and Michael A. Briere, “Gate Driving Scheme for Depletion Mode Devices in Buck Converters”, United Patent, US7839131, Nov. 23,2010
[3] Chung-Lung Pai, “Circuit for Driving a Depletion-type JFET”, United Patent ,US7116153,Oct. 3,2006. 子題三:電動助力自行車之直流無刷馬達驅 動控制 共同主持人:鄭泗東助理教授 1. 研究目的 電動自行車能提供適用於工作與休閒 之短程(<10km)交通運輸。我國法規對於電 動車助力自行車的條文規範為,以人力主, 電 力 為 輔 之 電動 車 ,其 最 大 行 駛 車速 為 25(km/h),且車重在 40(kg)以下的兩輪車 輛,因此本文將依此規範進行電動助力自行 車的研究。電動助力自行車的輪轂馬達必頇 滿足大扭力、低轉速特性。本研究使用直流 無刷馬達作為輪轂馬達,其具備高扭力、高 效率、擁有壽命長、不產生火花[1],因此適 合用在需要高安全性的交通工具上,已在電 動車、油電混和車、電動機車上廣泛使用。 在控制直流無刷馬達上,由於為梯形波反電 動勢,一般採用驅動方式為 120 度導通配合 脈衝頻寬調變來控制,產生類似矩形之電流 波形[2]。在實際騎乘電動助力自行車時因路 況、環境及騎乘者等因素,造成系統不確定 參數變化相當大。因此本研究使用自適應倒
階控制來設計轉速控制器,使電動助力自行 車有良好的穩態響應,其目的在使電動助力 自行車的能有高穩定度,來達到行駛上的高 安全性,並設計電動助力驅動控制策略來達 成助力性能。 2. 研究方法 自適應倒階控制設計 由於電動助力自行車在轉速控制上需 要良好的穩定性,而本研究所使用電動助力 自行車的馬達為直流無刷馬達,其屬於嚴格 回授型系統,因此可使用倒階控制設計轉速 控制器[1~7],完成倒階控制設計需要經過兩 個步驟,如圖一所示,其中 step1 為經由 Lyapunov 函數所推導出穩定運動方程式與 自 適 應 作 結 合 的 方 法 , 而 step2 為 經 由 Lyapunov 函數所推導出穩定 q 軸電機方程 式的方法。BLDCM 方塊則代表直流無刷馬 達之完全解耦動態模型。在實際系統架構 上,直流無刷馬達需與車輪作結合,因此阻 尼係數會造成變動,而其變動將影響轉速響 應之穩態誤差。而負載轉矩因為無法直接量 測其值,希望藉由估測的方是求得。所以本 研究使用以自適應律估測阻尼係數與負載 轉矩。 選取 Vq為馬達控制命令: ' 2 2 2 q qref q m p V c e Li Ri (1) 其中 c2>0,c2 為可調參數。加入阻尼係數 與負載轉矩的估測值,因此設計iˆqref為:
1 1
' 4 ˆ ˆ ˆ 3 qref ref L m i c e J T B p (2) 為了消除阻尼係數與負載轉矩的估測 誤差使系統穩定,因此將自適應律設定為: 1 1 ˆ B B r e (3) 2 1 ˆ L L T T r e (4) 無電流回授自適應倒階控制,可視為自 適應倒階控制改良型。其目的在於減少電流 感測器,因此在實際應用上更為容易。設計 概念是使用iˆqref取代原本的iˆ 電流回授,並q使用 Lyapunov 函數證明其穩定性。 以iˆqref 取代原本的iˆ 電流回授,因此設計q Vˆq
為: ' ˆ ˆ ˆ 2 q qref qref m p V Li Ri (5) 將(1)~(5)式與直流無刷馬達的架構方塊圖 如圖一所示。圖中 setp1 與 step2 為自適應 倒階控制器, Adaptive law 為經由 Lyapunov 函數所推導出估測阻尼係數與負載轉矩的 方法。由於倒階控制可調參數為 c1 與 c2。 在倒階控制參數設計上,本研究已由模擬的 方式得知當 c1 與 c2 參數增益增大,將使轉 速響應的響應速度增快。 圖一. 直流無刷馬達之無電流回授自適應 倒階控制架構 電動助力驅動控制策略 電動助力自行車必頇在騎乘者騎乘同 時給與騎乘者助力效果,因此本研究採用力 矩感測器去偵測人是否對自行車中軸產生 力矩,以此為基礎設計車速命令: 1 3.5 2 5( . ) 12 5( . ) ( / ) 0 command command V V T N m V V T N m km h V V (6) 其中 Vcommand:電動助力自行車車速命令 (km/h) V:自行車車速(km/h) T:自行車中軸力矩 (N.m)
當腳 踏 力 對 於中 軸產 生 大於 5(N.m)的力 矩,此方法可使騎乘者在起步時,能快速達 到 3.5(km/h)之車速,之後隨著車速變快而遞 減車速輔助倍率。由於腳踏力對於中軸所產 生的力矩每個角度不同,因此設計當腳踏力 對於中軸產生小等於 5(N.m)的力矩,是以現 在車速作為馬達命令。此方法不會因力矩變 低而使得馬達命令降低造成車速停頓,而影 響實際騎乘之不適;若長時間持續不踩踏, 會因空氣阻力、坡度阻力、地面摩擦阻力使 車速降低。若目前車速大於車速命令時,則 不對直流無刷馬達進行供電。 由於電動助力驅動控制策略是設計車 速命令,因推導出車速命令與馬達轉速命的 關係式: ( / ) 3.6 command ref V rad s r (7) 其中 r:車輪半徑(m), ωref:馬達轉速命令 當中軸力矩 T>5(Nm)時,自行車車速 V 所對 應的電動助力自行車車速命令 Vcommand如表 1 所示。由表 1 可知道電動助力驅動控制策 略 在 助 力 後 的 最 高 自 行 車 車 速 命 令 為 16.5(km/h),但當車速達達 16(km/h)會達到的 V > Vcommand 情 況 , 因 此 車 速 命 令 Vcommand=0(km/h),可視為停止對直流無刷馬 達 供 電 。 此 方法 能 達到 馬 達 助 力 限速 在 16(km/h),其符合我國法規在高於 25(km/h) 就停止馬達補助的標準。在實際上騎乘仍可 以 人 力 的 方 式 使 自 行 車 車 速 提 升 超 過 16(km/h) ,但馬達將不提供助力效果。 表 1 車速命令對應表 自行車車速 (km/h) 自行車車速命 令(km/h) 0 3.5 5 11.83 10 16 11 16.3 12 16.5 13 16.5 14 16.3 15 16 ≥16 0 由於自行車在實際騎乘需要克服空氣 阻力、坡度阻力、地面摩擦阻力才能驅動, 所以需要使用阻力數學模型來建立騎乘系 統,因此引用文獻[8]中的阻力數學模型: 2 ( ) 2 D drag W C A F VV (8) hill T F m g S (9) friction T R F m g C (10) 其中 Fdrag:空氣阻力;Fhill:坡度阻力; Ffriction:地面摩擦阻力;CD :空氣阻力係數; ρ:空氣密度係數;A:迎風面積;V :車速; VW:風速;mT:自行車與人的重量;S:坡度; CR:摩擦係數;g:重力。 而騎乘者對於自行車所產生的人力數學模 型為: r c human TG E F r (11) 其中 Fhuman:人力;T:中軸力矩;Gr:齒 輪比;Ec:效能係數;r:車輪半徑。 本研究使用表 2 為騎乘參數進行模 擬。參數中ρ=1.1644( kg/m3 )為當溫度為攝 氏 30 度時的空氣密度。假設在室內騎乘, 因 此 為 無 風 速 的 狀 態 也 無 坡 度 , 所 以 Vw=0(m/s) 、 S=0(%) 。 mT=92(kg) 是 人 重 為 75(kg),而車重為 17(kg)的總和。CD、A、
CR 為參考文獻[9]中,於平滑柏油路面上所
騎乘的 Upright commuting bike 的參數。本 研究使用為 26 吋自行車輪胎,因此車輪半 徑經過換算可得為 r=0.3302(m)。由於飛輪 為 14 齒、大齒盤為 34 齒,因此將飛輪除以 大齒盤的齒輪比,可得 Gr=0.4117。由於大 齒盤與飛輪在能量轉換會有能量損耗,因此 假 設 其 轉 換 效 能 為 Ec=0.87 。 重 力 g=9.81(m/s2)。 表 2 騎乘參數 參數 數值 單位 CD 1.15 - ρ 1.1644 kg/m3 A 0.55 m2 Vw 0 m/s mT 92 km/h S 0 % CR 0.006 - r 0.3302 m Gr 0.4117 - Ec 0.87 - g 9.81 m/s2 人力騎乘系統架構 人力騎乘系統架構是以阻力數學模型 與人力數學模型為基礎建立如圖二所示。 Fhuman為人力,其需要腳踏力對中軸所產生 的力矩 T 作為輸入,Ffriction 為地面摩擦阻 力,其會因各種路面狀況差異而產生不同阻 力。Fhill為坡度阻力,其與坡度成正比,因 此會隨坡度增加而增加阻力。Fdrag為空氣阻 力,其與風速加車速的平方成正比,因此會 隨風速與車速增加而增加阻力。將 Fhuman減
去 Ffriction、Fhill、Fdrag可得 Ftotal,再將 Ftotal
除以自行車與人的重量 mT可得自行車得加 轉速 a(m/s2 )。將 a(m/s2)進行積分可得自行 車得轉速 V(m/s),再將 V(m/s)乘以 3.6 可得 自行車得轉速 V(km/h)。 圖二 人力騎乘系統架構 為了能使模擬具有較高的準確性。因此使用 了 實 際 上 的 中軸 力 矩作 為 人 力 的 輸入 命 令。本研究是以力矩感測器去量測中軸的力 矩如圖三所示。由圖中可以得知在自行車起 步 0 到 5 秒時,需要較大的力矩去驅動自行 車,所以電動助力策略是以此基礎加入了起 步命令 3.5(km/h)的設計。 圖三 實際騎乘中軸力矩 以 圖 三 實 際 騎 乘 中 軸 力 矩 為 輸 入 命 令,經由表 2 的騎乘參數代入人力騎乘系統 架 構 去 模 擬 自行 車 的車 速 響 應 如 圖四 所 示。在 0 到 2 秒時,為了克服各種阻力所以 車速響應持續為 0(km/h),而在 2 秒過後, 由於已經克服各種阻力,使得車速響應會隨 著圖三的中軸力矩產生變動。換言由於人所 產生的力越大,則自行車加速度也會越大, 而 自 行 車 加 速度 會 對自 行 車 車 速 照成 影 響。因此圖四的自行車車速會隨時間而提 升。
電動助力騎乘系統架構
電 動 騎 乘 系 統 架 構 是 以 阻 力 數 學 模 型、人力數學模型、直流無刷馬達、自適應 倒階控制器、電動助力驅動控制策略為基礎 建立如圖五所示。除了 Fhuman、Ffriction、 Fhill、 Fdrag 外,還要加入直流無刷馬達所產生的
力。Power Assistant Law 為電動助力驅動控 制策略、Adaptive Backstepping controller 為 自適應倒階控制器、BLDCM 為直流無刷馬 達。將車速 V(km/h)代入電動助力驅動控制 策略中使其求得的直流無刷馬達的轉速命 令ωref。並使用自適應倒階控制器,讓直流 無刷馬達追蹤轉速命令ωref。直流無刷達為 了達到轉速命令ωref,因此會產生電磁轉矩 Te,將電磁轉矩 Te除以車輪半徑 r 可得直流 無刷馬達所產生的助力,而負載轉矩 TL 為
經由 Ffriction、 Fhill、Fdrag之和減去 Fhuman,
再除以車輪半徑 r 即可求得。將 Fhuman與直
流 無 刷 馬 達 所產 生 的助 力 相 加 , 再減 去
Ffriction、Fhill、Fdrag可得 Ftotal,將 Ftotal除以
自行車與人的重量 mT可得自行車得加轉速 a(m/s2)。將 a(m/s2)進行積分可得自行車得轉 速 V(m/s),再將 V(m/s)乘以 3.6 可得自行車 得轉速 V(km/h)。 圖四 人力騎乘對於自行車之車速響應 以 圖 三 實 際 騎 乘 中 軸 力 矩 為 輸 入 命 令,經由表 2 的騎乘參數代入電動助力騎乘 系統架構去模擬自行車的車速響應如圖六 所示。在 0 到 2 秒時,為了克服各種阻力所 車速響應持續為 0(km/h),而在 2 到 5 秒時, 車速響應會因電動助力驅動控制策略使車 速提升到 16(km/h),比較圖四人力騎乘對於 自行車之車速響應與圖六電動助力騎乘對 於自行車之車速響應可以發現,騎乘者對中 軸施加相同的力矩下,使用電動助力驅動控 制策略可快速提升自行車車速,因此採用電 動助力驅動控制策略的自行車具有助力的 性能。 圖五 電動助力騎乘系統架構 圖六 電動助力騎乘對於自行車之車速響應 3. 結果與討論 電動助力自行車實驗架構 本使研究以 XC866 晶片作為電動助力 自行車驅動控制器,實驗架構如圖七所示。 本研究的輪轂馬達為 24(V)、220(W)直流無 刷達裝置於前輪用來作為電動助力自行車 驅動源,為前驅式的設計。使用非接觸式力 矩感測器將其裝置於自行車中軸,用來量測 腳踏力對中軸所產生的力矩。將 24(V)鋰鐵
電池放置於自行車的貨架上,其為電動助力 自行車的電源。最後將 XC866 控制器放置 於鋰鐵電池上固定,控制器包含了驅動直流 無刷馬達與可撰寫控制程式的功能。 圖七 電動助力自行車架構 由於無電流回授自適應倒階控制中可 調參數為 c1、r1、r2,因此分別調整這些參 數對於實際轉速響應之影響。量測轉速的方 法為,擷取霍爾感測器訊號。 由於本研究使用的直流無刷馬達磁極 為六,因此直流無刷馬轉動一圈將會產生六 次霍爾感測器方波訊號。以示波器量測此方 波訊號,在經由程式軟體作轉換,可以得到 直流無刷馬達的轉速。 人力騎乘與電動助力騎乘車速響應量測 以距離為 42(m)之室內路面,坡度為 零、風速為零的情況下,量測人力騎乘車速 與電動助力騎乘之車速。使用 GARMIN Edge 500 自行車車錶專用記錄器量測車 速,由於此車速感測器是車輪每轉一圈記錄 一次的方式來計算出車速,因此對於起步與 煞車時,所量測的車速會有較大的誤差。所 以本文只觀察在穩定車速(除了起步與煞車) 狀態下的車速響應。實際量測人力騎乘之車 速響應如圖八所示,而實際量測電動助力騎 乘之車速響應如圖九所示。由圖八可以得知 以 人 力 騎 乘 在 穩 定 車 速 狀 態 下 車 速 為 8(km/h),而由圖九可以得知以電動助力騎 乘在穩定車速狀態下車為 16(km/h)。比較人 力騎乘車速與電動助力騎乘車速,可以發現 電動助力騎乘車速高於人力騎乘車速,因此 電動助力騎乘具有助力效果。 圖八 實際量測人力騎乘之車速響應圖 圖九實際量測電動助力騎乘之車速響應圖 4. 結論 此研究已將自適應倒階控制實際應用 在電動助力自行車上,此控制方法在實際騎 乘上具有良好轉速命令追蹤與穩定性。在控 制器設計上本文以倒階控制為基礎進行改 良,首先以自適應方法估測未知的阻尼係數 與負載轉矩,使得系統不會因阻尼係數與負 載轉矩變化而增加穩態誤差;再加入無電流 回授設計,省去了電流感測器因此易於應用 在實際系統。而無電流回授自適應倒階控制 器在設計轉速響應上只需調整 c1、r1、r2 參數即可改變響應速度。而各參數對於轉速 響應之影響為:c1 增益越大則響應速度越 慢,r1 增益越大則響應速度越快,r2 增益越 大則響應速度越快。 對於電動助力自行車之助力性能設計 上,本研究以電動助力驅動控制策略來達到 此性能。其擁有必頇踩踏才能啟動馬達助力 效果、起步省力、助力比隨車速增加而減 少、增加騎乘舒適度之功能。而當車速到達 16(km/h)將不再提供馬達電力,因此符合我
國法規。 由於無電流回授自適應倒接控制只能 確保其擁有穩定性,因此仍有可能產穩態誤 差。因此未來若能建立一套數學模型,藉由 分析與歸納來得到控制參數與穩態誤差的 關係,將有助於增強命令追蹤的準確性。至 於電動助力驅動控制策略還可加入其它性 能,如剎車回充將可將傳統煞車皮煞車改以 發電機煞車,將機械能轉換為電能進行電力 回收;而加入坡度感測可使電動助力自行車 依不同坡度調整其輔助倍率,使電動助力自 行車在各種坡度都達到良好助力效果。 5. 參考文獻
[1] Kai Zheng、Tielong Shen and Yu Ya,” A Nonlinear Control Scheme for the Traction Problem in EVs with Unknown parameters,” Journal of Asian Electric Vehicles, Vol.4, pp. 837-842, 2006. [2] Du Qu Wei、Xiao Shu Luo、Bing Hong
Wang and Jin Qing Fang, “Robust adaptive dynamic surface control of chaos in permanent magnet synchronous motor,” Physics Letters A, Vol.363, pp. 71-77, 2007.
[3] J. Zhou and Y. Wang, “Adaptive backstepping speed controller design for a permanent magnet synchronous motor,” IEEE Proceedings-Electric Power Applications, Vol.149, pp. 165 - 172, 2002.
[4] Tian-Hua Liu、Hang-Ting Pu、Cheng-Kai Lin 、 Ching-Guo Chen ; , “Adaptive controller design for a PMSM knitting machine control system,” International Conference on Power Electronics and Drive Systems, pp. 84- 89, 2010.
[5] Ouassaid, M.;Cherkaoui, M.、Zidani, Y., “A nonlinear speed control for a PM
synchronous motor using an adaptive backstepping control approach,” IEEE International Conference on Industrial Technology, Vol.3, pp. 1287 - 1292, 2004.
[6] Shuanghe Yu、Zhenqiang Yang、Siyuan Wang、Kai Zheng, “Sensorless Adaptive Backstepping Speed Tracking Control of Uncertain Permanent Magnet Synchronous Motors,” International Symposium on Systems and Control in Aeronautics and Astronautics (ISSCAA), pp. 1131 - 1135, 2010.
[7] Hu Jianhui、Xu Yongxiang、Zou Jibin “Design and Implementation of Adaptive Backstepping Speed Control for Permanent Magnet Synchronous Motor,” World Congress on Intelligent Control and Automation, Vol.1, pp. 2011 - 2015, 2006.
[8] Muetze, A.; Tan, Y.C, “Performance evaluation of electric bicycles” IEEE Industry Applications Magazine , Vol.4, pp. 2865 - 2872, 2005.
[9] Kyle, C. (1988).” The mechanics and aerodynamics of cycling,” In E,” Medical and Scientific Aspects of Cycling,pp 235-251. 子題四: 電動自行車之馬達、發電機、運 動控制模式 主持人:成維華教授 1. 研究目的 現今市面上銷售的電動腳踏車主要可 分為三種趨勢,分別是-以速度為銷售訴 求、以輕量化材質為銷售訴求、以省錢方便 為銷售訴求,本研究主要是以 RS-232 為通 訊平台,進行各部分元件中的整合,達到符
合速度、輕量化材質、省錢方便的需求。 另外為了保護膝蓋,避免運動傷害,本研究 提 出 以 四 連 桿模 型 模擬 騎 乘 腳 踏 車的 動 作,並計算出在騎乘腳踏車時膝蓋的受力, 在膝蓋受力過大時加入馬達助力,達到能夠 結合環保、便利、健康於一的電動腳踏車。 2. 研究方法 本系統的整合如圖 1: 電動腳踏車由人機介面選擇定速或輔 助力矩模式傳遞控制訊號,訊號透過 RS-232 與 driver 通訊,driver 調控 PWM 的開關時 間來控制 BLDCM,這時候透過 encoder 回 饋回 driver 做更進一步的控制,如速度和位 置控制。 數 位 伺 服 驅 動 器 部 分 是 與 以 色 列 大 廠 ELMO Motion 合作,採用他們的 Whistle 系 列產品,它的特色是體積小、可驅動負載功 率大、熱損小、通訊多元及可程式化,此次 我們主要採用便宜易維修的 RS-232 為溝通 介面,以 Visual Studio 2008 為開發系統介面 搭配 NI 的 Measurement Studio 8.6,它的應 用如圖 2: 腳踏車的控制主要是透過人機介面,在 程式中透過 RS-232 回傳的值,解析可得現 在的速度、電流、控制器溫度、電池電量。 除了可任意加速的一般模式外,也設計了定 速模式的功能,藉著人機介面的互動,可將 伺服驅動器的 Torque 模式切換到 Speed 模 式,便可達到定速的功能。 在運動傷害防治方面,為了達到減緩膝 蓋衝擊、保護膝蓋的目標,將騎乘腳踏車的 輔助力矩輸入 定速功能 圖 4、定速功能實行示意 圖。 圖 3、定速功能控制流程方塊 圖。 圖 2、系統開發架構 圖。 PWM RS-232 E-bike driver BLDC encoder 圖 1、電動腳踏車系統整合 圖。
動作模擬成四連桿機構如第一圖,座椅固定 桿為第一桿,踏板曲柄為第二桿,小腿為第 三桿,大腿為第四桿,透過計算四連桿模型 連桿間的作用力 (圖 5)並參考文獻提出的 膝 蓋 骨 骼 模 型 ( e.g., ERICSON et al ; 1987)。 經由運動學、動力學的推導,可以得到 此四連桿模型的動態方程式: ) ( ) ( ) ( ) , ( ) ( m m M G c N I (式 1) 其中:
cartesian coordinate angles
)
(
I equivalent inertial term
) , (
N Coriolis and centripetal effect term
c
friction coefficient ) (
G gravity effect terms
)
(
m
M mechanism advantage matrix
)
(
m torque input matrix
並可以由此模型推導出膝蓋受力的方量方 程式(式 2、3),計算出在踩踏腳踏車時膝蓋 的受力週期 (圖 6)。 )) ( tan cos( 4 1 jy jx j ULeg F F F F (式 2) knee jy jx ULeg cp F F F F F cos(4tan1( )) (式 3) 計算出膝蓋受力後,在膝蓋受力過大時 加入定力矩的馬達助力,並比較方法實施前 後的股四頭肌 EMG 訊號,由於股四頭肌為 拉扯膝蓋的主要肌肉群,所以股四頭肌拉力 降低可以表示膝蓋受到的壓力減少。 為了量測在定速下加入馬達助力後的 EMG 訊號,在人機介面中先給定一定電流使馬達 輸出定力矩,並配合腳踩至 60 rpm,紀錄此 時的股四頭肌肌電訊號。 3. 結果與討論 經由比較到的股四頭肌 EMG 量測訊號 後,可以得到比較圖如圖 7 所示,其中深黑 線代表加入馬達助力前的股四頭肌出力週 期,淺黑線代表加入馬達助力後的股四頭肌 出力週期。股直肌與股外側肌的出力較為明 圖 6、模擬計算出的膝蓋受力週期, 縱軸為 N,橫軸為踏板曲柄角度,0 度定義為與固定桿重合之直線 X Y 4 3 1 L 2 2 L 3 L 4 L 1 2 L 圖 5、以四連桿機構模擬騎乘腳踏 車動作示意圖
顯,
股內側肌的出力幅度較小,符合文獻中 (e.g., Raymond et al., 2005)踩踏腳踏車時主 要出力的肌肉為股外側肌和股直肌的看法。 另外在定速實驗,如圖 8 所示為一開始 先加速,直至限速這時 Tablet PC 會因為 scaling match 的關係進行減速的動作,重複 來回幾個步驟便可看出限速在 50km/h,接 著切換速度模式,進行定速實驗,在實驗 中,不定時施予阻力,然後停止施予阻力, 因此可看到電流上上下下的圖形,最後按下 煞車,又跳回到力矩模式,最後速度收斂到 零。 4. 結論 從實驗結果可以看出,在本運動輔助方 法實施後,膝蓋受力明顯的降低,顯示本方 案確實有助於在騎乘腳踏車時減少膝蓋受 到的壓力。另外本計畫中所開發出來的電子 限速,能夠避免過度激烈操作馬達,同時也 能預防電力過度消耗而減短續航力,而定速 功能則可在休閒遊憩時使用。 本計畫中的腳踏車已包含了一般電動 騎乘模式、定速功能、限速功能,以及膝蓋 防護的功能,達成環保、便利、舒適合一的 多功能電動腳踏車。 5. 參考文獻
[1] Yasuhito Tanaka and Toshiyuki Murakami,” A Study on Straight-Line Tracking and Posture Control in Electric Bicycle”, IEEE TRANSACTIONSON INDUSTRIAL ELECTRONICS, VOL.56, NO.1, JANUARY 2009. [2] Masaki Yamakita and AtsuoUtano,”
Automatic Control of Bicycles with a Balancer”, 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Monterey, California, USA,24-28July,2005
[3] Gwo-Ruey Yu and Rey-Chue Hwang,” 圖 8、定速實驗中驅動器電流、輪
胎速度、電池電壓
伺服器溫度圖
Rectus femoris
Crank angle (deg)
Vastusmedialis
Crank angle (deg)
Vastuslateralis
Crank angle (deg)
圖 7、量測結果。此圖為踏板踩速 在 60 RPM 下的股四頭肌肌電訊號 量測結果
Optimal PID Speed Control of Brushless DC Motors Using LQR Approach”, 2004 IEEE International Conference on Systems, Man and Cybernetics
[4] R. R. Neptune, S. A. Kautzt and M. L. Hull, “The effect of pedaling rate on coordination in cycling”, Biomechanics, Vol. 30, No. 10, pp. 1051 -1058, 1997
[5] MATS O. ERICSON and RALPH NISELL, “Patellofemoral Joint Forces During Ergometric Cycling”, Physical Therapy, Volume 67, Number 9, September, 1987
[6] Raymond C.H. So, Joseph K. -F. Ng, Gabriel Y.F. Ng, ”Muscle recruitment pattern in cycling: a review”, Physical Therapy, Sport 6, pp. 89-96, 2005 [7] Christine C. Raasch, Felix E. Zajac,
Baoming Ma and William S. Levine, “Muscle Coordination of Maximum-Speed Pedaling”
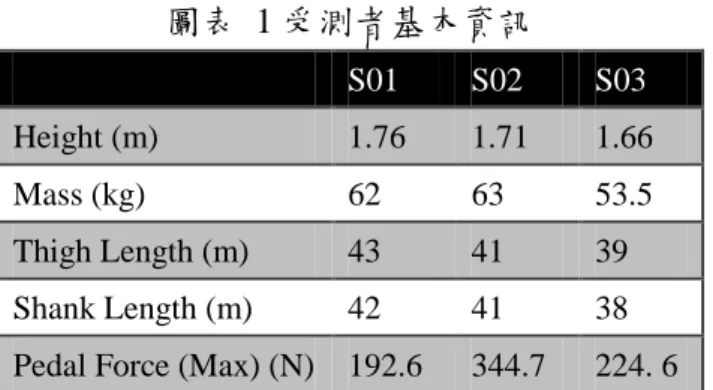
[8] R. R. Neptune and M. L. Hull, “Evaluation of Performance Criteria for Simulation of Submaximal Steady-State Cycling Using a Forward Dynamic Model”, Transactions of the ASME, Vol. 120, JUNE, 1998 子題五:節能與動力控制技術對使用者運動 效能之研究 主持人:楊秉祥 副教授 研究人員:林芷沂、劉伊晟、梁維元 1. 研究目的 隨著自行車騎乘者的增加,相關運動傷 害的發生率也隨之上升,本研究將著重於過 度之往復關節(Overuse injury)所造成的傷 害,往復關節之定義為騎乘時往復曲屈與伸 直肢段,以膝關節為最常發生運動傷害的關 節部位,此類自行車騎士關節疼痛之現象大 多 是 由 於 髕 骨與 股 骨之 間 受 到 過 度的 壓 力 , 故 以 髕 骨 股 骨 關 節 疼 痛 症 候 群 (Patellofemoral syndrome) 稱 之 , 亦 或 以”Cyclist’s knee”及 ”Bike’s knee”稱之。 據 文 獻 指 出 , 騎 乘 自 行 車 導 致”Cyclist’s knee”可能概分為兩者,其一為:由不適當 的生物力學參數所導致:股四頭肌的能力不 足、肌肉彈性差、兩腿的長度差異、膝關節 內翻或外翻失調以及不適當的自行車參數 尺寸;其二則是騎士騎乘方式所導致如:長 時間騎乘於上坡之路段,或是騎乘時之踩踏 率不適當。 因 此 本 研究 利 用自 行 車 動 態 量測 平 台,以實體自行車量測使用者於不同路況下 人體肌肉使用狀況,並建立自行車騎乘模式 之人因參數,作為控制系統模擬與開發之基 礎,期能開發一依使用者使用需求與實際行 車狀態,即時進行適切之動力輔助或節能控 制之自行車動力控制模組。將針對自行車進 行控制相關參數擬定與系統表現確認,主要 著眼為設計針對使用需求與運動安全考量 發展自行車所需之動力輔助控制參數。 2. 研究方法 實驗對象:自國立交通大學中募集三位 不同身型尺寸且無騎乘自行車障礙的成年 人(錯誤! 找不到參照來源。),所有受試者 皆 未 患 有 任 何肌 肉 骨骼 或 神 經 方 面的 疾 病,像是類風濕性關節炎、下肢關節韌帶或 是軟骨受傷,亦不具其他下肢疾病病史,同 時不具有平衡方面的問題。
圖表 1 受測者基本資訊 S01 S02 S03 Height (m) 1.76 1.71 1.66 Mass (kg) 62 63 53.5 Thigh Length (m) 43 41 39 Shank Length (m) 42 41 38
Pedal Force (Max) (N) 192.6 344.7 224. 6
室外量測平台:本研究利用可在室外量測功 率及肌電訊號的平台,大致架構如圖 1 所 示。採用巨大機械工業股份有限公司所生產 的 R1000 (R1000,巨大機械工業股份有限公 司,台中縣,中華民國)作為實驗用自行車; 採 用 絕 對 式 角 度 編 碼 器 (E6F-AB3C-C, OMRON 株式会社, 京都, 日本),利用皮帶 摩擦輪組使其與鏈輪同軸旋轉,故可得知每 個時間點所對應的曲柄角度。單軸測力規 (LC321-500, omegadyne, inc., USA) 設置於 踏板上,量測垂直於踏板的力量。 肌電訊號電極 攜帶型電腦 訊號擷取系統 磁簧開關 測力規 角度編碼器 自行車碼表 時速顯示器 圖 1 室外量測平台示意圖 表 面 肌 電 訊 號 量 測 系 統 (High Level Transducer Module, BIOPAC Systems, Inc., USA)利用肌電訊號電極擷取訊號,量測受 試者左側之單腳四條肌肉(圖 2):股外側 肌 (Vastus lateralis, VL) 、 股 直 肌 (Rectus femoris, RF) 、 外 側 腓 腸 肌 (Gastrocnemius lateralis, GL)以及脛骨前肌(Tibialis anterior, TA) 。
上述儀器利用訊號擷取介面 MP150 (MP150, BIOPAC Systems, Inc., USA) 整 合,並將資料擷取頻率設定為 1000Hz,儲 存於攜帶型電腦中。
圖 2 表面肌電訊號量測肌肉。左圖為前視 圖,由上而下依序為股直肌(Rectus femoris, RF)、股外側肌 (Vastus lateralis, VL)以及脛 骨前肌(Tibialis anterior, TA);右圖為後視 圖 , 外 側 腓 腸 肌 (Gastrocnemius lateralis, GL)。 實驗騎乘距離每次為 30 公尺,起始位 置距離實驗路線前 10 公尺以上,以確保在 實驗過程時已達到穩定狀態。實驗過程踩踏 率分為 80rpm、60 rpm 與 40rpm,順序將隨 機決定,各重複試驗三次後,更換實驗地 點,再重複進行實驗三次直至所有條件皆完 成資料擷取與儲存。實驗路線則根據交通大 學的地形及路面狀況來決定,選用的條件 有:柏油路面搭配平路及 4.53 度(約 8%)兩 種不同條件。 圖 3 實驗路線實照。圖中標號 1、2 分別為 4.53 度(約 8%)柏油上坡以及柏油平路。受 測者由黃線開始騎乘,紅線範圍為實驗資料 記錄的區域。 本研究採用 肌肉骨骼 模擬系統 AnyBody
Modeling System (AnyBody Technology A/S, Aalborg, Denmark)模擬自行車騎乘時之肌 肉活化與關節受力情形。導入與室外平台尺 寸相同的車架模型與進行人體模型姿勢的 調整,也修改人體模型的下肢肢段長度,分 別符合三位受測者(圖 3)。 在模擬軟體的主程式部分是由踩踏率與功 率輸出所驅動。因此,為了模擬實際室外之 騎乘,本研究將實驗所量測之踩踏率取代原 有定值,而功率輸出則是利用量測得之踩踏 力進一步比對調整。 圖 3 基準模型 3. 結果與討論 由先前研究得知:在不同坡度下,曲柄扭矩 與股外側肌之肌肉活化程度隨著坡度上升 而上升(P<0.01),因此,由室外實驗驗證: 踩踏率與車速(及齒比)固定的條件下,股外 側肌為騎乘時動力提供之主要肌肉。 圖 4 十位受測者在不同坡度下肌電訊號峰 值之平均值與標準差(縱軸為對柏油平路峰 值進行正規化之肌電訊號。*:p<0.05,**: p<0.01,paired t-tests) 由於人體存在個體間差異,使得單一或少數 騎乘者的研究成果無法直接做為一般性的 現 象 , 因 此 利 用 平 均 標 準 差 法 (mean deviation, MD)比較受測者個體間肌肉活化 情形的變異性。結果顯示股直肌與外側腓腸 肌及脛骨前肌,相較於股外側肌都有較高的 變異性,這結果表示在相同數量的受測者 下,股外側肌的研究結果較其他肌肉能代表 更大母體的狀況(圖 5)。 圖 5 肌肉變異性 因此,利用肌肉骨骼模擬系統模擬股外側肌 之活化情形,將實驗量測與模擬數據經過正 規化後有相同的趨勢(圖 6),故可進一步用 量化動力輔助使用者騎乘之負荷。 圖 6 肌肉活化情形,實線為模擬 藉由肌肉骨骼模擬軟體可模擬實驗無法量 測得肌肉受力情形,文獻指出,減少膝蓋的
側向位移可降低髕骨股骨關節症候群的風 險。因此觀察三位受測者個別模型模擬之膝 關節側向受力與實驗量測踩踏力的對應情 形,發現當踩踏力大於 220N 時,膝蓋會承 受往外側(正值)的力,易造成髕骨股骨關節 症 候 群 , 故 動力 輔 助應 該 在 踩 踏 力大 於 220N 時提供(圖 7)。 圖 7 由模擬之膝蓋側向受力對應實驗量測 的踩踏力 並可由肌肉骨骼模擬軟體進一步模擬動力 輔助之策略,目前由降低關節受力或降低股 外側肌活化兩方面進行探討(圖 8)。 圖 8 模擬不同動力輔助模式 4. 結論 藉由肌肉骨骼模擬軟體模擬膝關節側 向受力與實驗量測踩踏力的對應情形,發現 當踩踏力大於 220N 時,易造成髕骨股骨關 節症候群,故動力輔助應該在踩踏力大於 220N 時提供,並可模擬不同動力輔助下關 節受力與肌肉活化情形,故可將此生理訊號 提供於其他子題進行整合。 5. 參考文獻
[1] Akuthota, V., C. Plastaras, et al. (2005). "The Effect of Long-Distance Bicycling on Ulnar and Median Nerves." The American Journal of Sports Medicine
33(8): 1224.
[2] Akuthota, V., C. Plastaras, et al. (2005). "The effect of long-distance bicycling on ulnar and median nerves - An electrophysiologic evaluation of cyclist palsy." American Journal of Sports
Medicine 33(8): 1224-1230.
[3] Asplund, C. and P. St Pierre (2004). "Knee pain and bicycling." Phys. Sportsmed
32(4): 23¡V30.
[4] Cook, J., K. Khan, et al. (2000). "Overuse tendinosis, not tendinitis." Phys Sportsmed
28(6): 31-46.
[5] Cushman, R., J. Down, et al. (1990). "Bicycle-related injuries: a survey in a pediatric emergency department." CMAJ: Canadian Medical Association Journal
143(2): 108.
[6] Dannenberg, A., S. Needle, et al. (1996). "Predictors of injury among 1638 riders in a recreational long-distance bicycle tour: Cycle Across Maryland." The American Journal of Sports Medicine 24(6): 747. [7] Dennerlein, J. and J. Meeker (2002).
"Occupational injuries among Boston bicycle messengers." American Journal of Industrial Medicine 42(6): 519-525. [8] Dingwell, J., J. Joubert, et al. (2008).
"Changes in Muscle Ativity and Kinematics of Highly Trained Cyclists During Fatigue."
[9] Holmes, J., A. Pruitt, et al. (1994). "Lower extremity overuse in bicycling." Clinics in sports medicine 13(1): 187.
[10] Kennedy, J. (2009). "Neurologic Injuries in Cycling and Bike Riding (Reprinted from Neurologic Clinics, vol 26)." Physical Medicine and Rehabilitation Clinics of North America 20(1): 241-+. [11] Ryan, M. and R. Gregor (1992). "EMG
profiles of lower extremity muscles during cycling at constant workload and cadence." Journal of Electromyography and Kinesiology 2(2): 69-80.
[12] Wanich, T., C. Hodgkins, et al. (2007).
"Cycling injuries of the lower extremity." Journal of the American Academy of Orthopaedic Surgeons 15(12): 748. [13] Weiss, B. (1985). "Nontraumatic injuries
in amateur long distance bicyclists." The American Journal of Sports Medicine
13(3): 187.
[14] Wilber, C., G. Holland, et al. (1995). "An epidemiological analysis of overuse injuries among recreational cyclists." International journal of sports medicine
國科會補助計畫衍生研發成果推廣資料表
日期:2011/09/23國科會補助計畫
計畫名稱: 次世代高效率電動車驅動與控制系統研究(2/3) 計畫主持人: 成維華 計畫編號: 99-2218-E-009-003- 學門領域: 民生系統之節能技術研發(跨領域 專案計畫)無研發成果推廣資料
99 年度專題研究計畫研究成果彙整表
計畫主持人:成維華 計畫編號:99-2218-E-009-003-計畫名稱:次世代高效率電動車驅動與控制系統研究(2/3) 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 1 0 100% 研究報告/技術報告 0 0 100% 研討會論文 4 0 100% 篇 論文著作 專書 0 0 100% 申請中件數 8 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 17 17 100% 博士生 7 7 100% 博士後研究員 0 0 100% 國內 參與計畫人力 (本國籍) 專任助理 0 0 100% 人次 期刊論文 8 0 100% 研究報告/技術報告 0 0 100% 研討會論文 7 0 100% 篇 論文著作 專書 0 0 100% 章/本 申請中件數 8 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 0 0 100% 博士生 0 0 100% 博士後研究員 0 0 100% 國外 參與計畫人力 (外國籍) 專任助理 0 0 100% 人次其他成果