Pergamon
Computers Math. Applic. Vol. 29, No. 3, pp. 37-47, 1995 Copyright©1995 Elsevier Science Ltd Printed in Great Britain. All rights reserved 0898-1221/95 $9.50 + 0.00
0898-1221(94)00227-4
A N e w Heuristic Approach for Reliability
Optimization of Distributed C o m p u t i n g
S y s t e m s Subject to Capacity Constraints*
R U E Y - S H U N C H E N , * * D E N G - J Y I C H E N A N D Y . S . Y E H I n s t i t u t e of C o m p u t e r Science and Information Engineering
National Chiao Tung University, Hsinchu, Taiwan, R.O.C. (Received November 1993; accepted December 1993)
A b s t r a c t - - D i s t r i b u t e d Computing Systems (DCS) have become a major trend in computer sys- tem design today, because of their high speed and reliable performance. Reliability is an important performance parameter in DCS design. In the reliability analysis of a DCS, the term of K-Node Re- liability (KNR) is defined as the probability that all nodes in K (a subset of all processing elements) are connected.
In this paper, we propose a simple, easily programmed heuristic method for obtaining the optimal design of a DCS in terms of maximizing reliability subject to a capacity constraint. The first part of this paper presents a heuristic algorithm which selects an optimal set of K-nodes that maximizes the KNR in a DCS subject to the capacity constraint. The second part of the paper describes a new approach that uses a K-tree disjoint reduction method to speed up the KNR evaluation. Compared with existing algorithms on various DCS topologies, the proposed algorithm finds a suboptimal design much more efficiently in terms of both execution time and space than an exact and exhaustive method for a large DCS.
K e y w o r d s - - D i s t r i b u t e d computer system (DCS), K-node reliability (KNR), Capacity constraint, Heuristic, K-tree disjoint reduction.
1. I N T R O D U C T I O N
D i s t r i b u t e d C o m p u t i n g S y s t e m s ( D C S ) have b e c o m e i n c r e a s i n g l y p o p u l a r in r e c e n t y e a r s , for t h e a d v e n t o f V L S I t e c h n o l o g y a n d low-cost m i c r o p r o c e s s o r s h a s m a d e d i s t r i b u t e d c o m p u t i n g e c o n o m i c a l l y p r a c t i c a l in t o d a y ' s c o m p u t i n g e n v i r o n m e n t . T h e D C S p r o v i d e s p o t e n t i a l i n c r e a s e s in r e l i a b i l i t y , t h r o u g h p u t , f a u l t t o l e r a n c e , r e s o u r c e s h a r i n g , a n d e x t e n d i b i l i t y [1,2]. A c h i e v i n g i n c r e a s e s in t h e s e p e r f o r m a n c e c h a r a c t e r i s t i c s , however, r e q u i r e s careful d e s i g n t o i n c r e a s e t h e r e l i a b i l i t y o f a D C S . A D C S h a s b e e n d e f i n e d as a c o l l e c t i o n o f n o d e s a t w h i c h r e s i d e c o m p u t i n g r e s o u r c e s t h a t c o m m u n i c a t e w i t h e a c h o t h e r v i a a set of links [3]. L a r g e scale D C S s are c o m i n g i n t o use p r i m a r i l y b e c a u s e o f t h e e c o n o m y a c h i e v e d t h r o u g h r e s o u r c e s h a r i n g [4]. T h e m a i n o b j e c t i v e o f a D C S is t o p r o v i d e efficient c o m m u n i c a t i o n a m o n g v a r i o u s n o d e s in o r d e r t o i n c r e a s e t h e i r u t i l i t y a n d t o m a k e t h e i r s e r v i c e a v a i l a b l e t o m o r e users [5]. O n e o f t h e f u n d a m e n t a l c o n s i d e r a t i o n s in d e s i g n i n g s u c h s y s t e m s is t h a t of s y s t e m r e l i a b i l i t y , w h i c h s t r o n g l y d e p e n d s on t h e t o p o l o g i c a l l a y o u t o f t h e c o m m u n i c a t i o n links [6]. R e l i a b i l i t y is a v e r y g o o d m e a s u r e o f D C S p e r f o r m a n c e if all t h e n e e d e d n e t w o r k users a r e t o b e c o n n e c t e d w i t h e a c h o t h e r . S e v e r a l D C S r e l i a b i l i t y *This research was partially supported by the National Science Council of the Republic of China under contract NSC82-0301-E009-013.**Author to whom all correspondence should be addressed.
Typeset by ¢4A4S-TEX 37
38 R.-S. CHEN et al.
measures have been defined and associated evaluation methods have been developed. One of these distributed system reliability measure [6-8], K - N o d e Reliability (KNR), is adopted in this paper, K N R is defined to be the probability that all K (a subset of the processing elements) nodes in the DCS can be run successfully. A DCS may be modelled by a graph in which the nodes correspond to the file servers and the edges to the communication links.
Several heuristic methods [9-11] have been proposed for obtaining an optimal network topology t h a t gives the maximum overall reliability of a given computer communication network. All of the proposed methods find an approximate solution, because as the number of links increases, the number of possible layouts of the links grows faster t h a n exponentially. To date, the problem of maximizing the reliability of a DCS under a capacity constraint have been considered by [12]. In this paper, we present a heuristic algorithm for maximizing reliability by the node select problem to obtain an optimal design DCS. In the second part of the paper, we present a new method for computing K N R based on a K-tree disjoint reduction method. The m e t h o d is simple and easy to program. This algorithm may be useful when the system under consideration is very large and when any near optimal solution serves the purpose.
The organization of the rest of this paper is as follows. In Section 2, the problem statement, notation, and definitions t h a t will be used throughout this paper are given. Section 3 presents the mathematical formulation of the problem. The heuristic algorithm with the K-tree disjoint reduction method are proposed in Section 4. In Section 5, simulation and analyses of the heuristic algorithm with the K-tree disjoint reduction method is discussed. Section 6 concludes the paper.
2. P R O B L E M
S T A T E M E N T , N O T A T I O N A N D D E F I N I T I O N S
PROBLEM STATEMENT. The method suggested here can be characterized as follows: GIVEN.Network topology.
The reliability of each communication link. T h e capacity of each node installed. Each node is perfectly reliable.
Each link is either in the working (ON) state or failed (OFF) state. CONSTRAINT. The total capacity constraint on the DCS.
GOAL. Maximize reliability for optimal design of a DCS.
NOTATION AND DEFINITIONS. The notation and definitions used in the rest of the paper are summarized here.
G(N, L) an undirected DCS graph in which X8 the set of nodes N represents the Ci PEs and the links L represent the
communication links C8
N~ a node representing a processing Gx element i
L~ an edge representing a communica~ R(Gx)
tion link i
X~ a decision node, Xi = 1 if i is Gk
selected, else Xi = 0
X* denote the first vector following X R(Gk)
in the numerical ordering that has
the property that X < X* ei
Si the ith node select to add to the X ^ starting node set
X = {X1, X2, the set of decision nodes, Xi -- 0 or R ^ X3,...,Xn} 1, i = 1,2,...,n
the starting node of the DCS the capacity of the i th node the capacity constraint in a DCS denotes the graph G with X-node specified
the reliability of X-node solution of the DCS graph G
denotes the graph G with K-nodes specified, and K > 2
the reliability of K-nodes solution of the DCS graph G
the i th edge of DCS
denotes the vector which has current optimal solution R(Gx) denotes the current optimal reliability solution
DEFINITION 1. A K - t r e e is a tree of G covering ali nodes of K such that its pendant nodes are in K.
DEFINITION 2. K - N o d e R e l i a b i l i t y ( K N R ) is defined as the probability of successful commu-
nication, i.e., a11 K-nodes (a subset oY all the processing elements, K >_ 2) in a DCS are connected by working edges.
DEFINITION 3. A K - n o d e D C S r e l i a b i l i t y p r o b l e m is the problem of computing R(Gk). The
problem is a member of the class of number K-complete problems, which is a class of NP-hard problems not known to be in NP.
3. M A T H E M A T I C A L F O R M U L A T I O N O F T H E P R O B L E M
The problem considered in this paper may be stated as follows: Determine an optimal DCS that gives maximum reliability with the given capacity constraint. In other words, we are to find a set of K-nodes from the given set of N nodes which constitutes an optimal DCS in that KNR is maximized, and the total capacity satisfies the needed total capacity constraint. Consider the simple optimal DCS problem stated mathematically as follows:
Maximize R (Gk)
subject to: E CiXi >_ C8.
X i E K
To find an optimal solution, we do not consider an exhaustive method, since it is too time- consuming, instead, the exact algorithm to find an optimal solution by finding maximum reliabil- ity K-nodes and executing only a portion of all the combinations. The exact algorithm is given below.
STEP 1. Determine whether the count number has overflowed. If X > overflow X then stop; otherwise go to the next step.
STEP 2. Compare the capacity' ~=1~ C i ( X * - l ) i with capacity constraint Cs. i f ~ = l n Ci(X*-I)~
< Cs, then substitute X for X* and go to back to Step 1, else go to the next step.
STEP 3. Compare the capacity ~n__ 1 C~X~ with capacity constraint Cs. If ) - ~ 1 C~X~ < Cs,
then X = X + 1 and go to back to Step 1, else go to the next step.
STEP 4. Compare the vector partial ordering X with X ^. If X > X ^, then X is substituted for X* and go to back to Step 1, else go to the next step.
STEP 5. Compute reliability R(Gx) and compare with current optimal solution R ^. If
R(Gx) > R ^, then substitute R ^ for R(Gx) and X n for X, else substitute X for X* and go to back to Step 1.
STEP 6. Continue loop until X overflow. Then the last R(Gx^) reliability computed with the
SYREL [13] is obtained for our K-node reliability and X ^ is obtained for our optimal node vector.
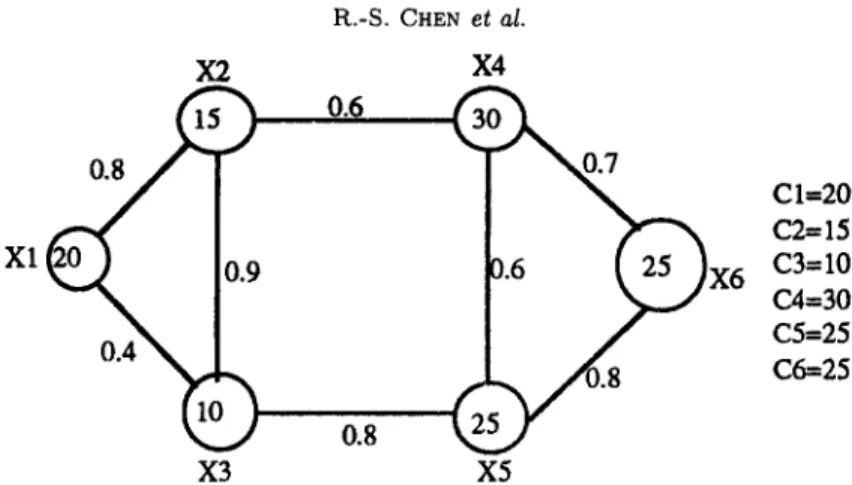
The exact method is illustrated below by a numerical example. Consider the six node DCS with eight links depicted in Figure 1. Here our problem is to determine an optimal DCS which includes some of the nodes X1, X2 . . . . , X6, whose total capacity exceeds the capacity constraint of 70 units. The optimization can be formulated as the following mathematical problem:
Maximize R (Gk)
to: ~ C~Xi >_ 70. subject
40 X2 0.8 Xl 0.9 X3 0.6 R.-S. CHEN et al. X4 ).6 0., X5
Figure 1. A six-node distributed computing system.
CI=20 C2--15 C3=I0 CA=30 C5=25 C6=25
Using a C computer program based on the proposed algorithm, an optimal DCS was obtained by an Intel-486 personal computer in 3 clock cycles of execution time. T h e optimal K - D C S topology with node vector (X1, X2, X3, )(5) was found in the DCS with maximum reliability of 0.7628 and total capacity of 70 units. T h e evaluation count was only 17, compared with a count of 64 for the exhaustive method. This is a rather modest reduction in computing, but a much greater execution time will be spent in problems with a larger DCS. Although an exact m e t h o d [12] provides an optimal solution, it cannot effectively reduce the problem space. Sometimes an application requires a fast way to compute reliability because of its resource considerations. In this situation, obtaining the optimal reliability may not be the best idea, instead, a fast m e t h o d providing near optimal reliability computation may be better. In real cases, most DCSs are large, and as the number of nodes increases, the execution time needed to obtain a solution grows exponentially. So to reduce the total execution time for optimal design of a DCS, we were motivated to develop a heuristic algorithm using the K - t r e e disjoint reduction m e t h o d to reduce the execution time needed to compute K N R when the DCS under consideration is very large.
4. T H E P R O P O S E D H E U R I S T I C A L G O R I T H M
A N D K - T R E E D I S J O I N T R E D U C T I O N
M E T H O D
Obviously, the problem for a large DCS, such as a metropolitan area network, requires a great deal of execution time. Our problem is to propose a good heuristic using the K - t r e e disjoint reduction m e t h o d so t h a t the DCS can provide the desired performance. Because of computational advantages, a heuristic method may be preferred to a exact m e t h o d when the DCS is large. A number of greedy algorithms for computer communication networks have already been proposed by Aggarwal et al. [9-11]. The main drawback of their approach is t h a t it requires the generation of spanning trees, many of which are never used subsequently, because of the cost constraint. A good deal of computer time is thus wasted.
In this section, we suggest a heuristic algorithm for large DCS problems t h a t largely avoids unnecessary generation of spanning trees. We regard the DCS as a weighted graph, in which the weight of each node represents its capacity, and generate K - n o d e disjoint terms using a K - t r e e disjoint reduction method to obtain KNR. The proposed heuristic algorithm is as follows.
H e u r i s t i c A l g o r i t h m
T h e algorithm consists of six steps:
STEP 0. Initialization, read system parameters.
STEP 1. Choose any one node as a starting node X s and compute the reliability of the starting node to other nodes R ( G k ) using SYREL [13].
STEP 2. Take the sum of the node capacity of both the starting node and the other nodes
~x~g C~Xi.
A New Heuristic Approach 41
STEP 3. Select the node X~ with the maximum
[R(Gk)* ~x, eg CiXi]
and add to the nextstarting node set.
STEP 4. Use the K-tree disjoint reduction method to reduce immediately disjoint terms and call SYREL [13] to compute the KNR of the next starting node set.
STEP 5. Repeat Step 1 to Step 4 until the total capacity of the starting node set exceeds the capacity constraint. Then output the last starting node set and the maximum reliability.
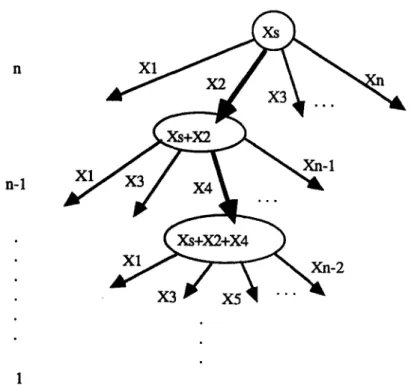
The operation of the heuristic algorithm is illustrated in Figure 2. We determine the optimal design of a DCS that maximizes KNR, iff the total capacity of the corresponding starting node set satisfies the given capacity constraint.
n
n-1
Figure 2. The operation of the heuristic algorithm.
T h e K - T r e e D i s j o i n t R e d u c t i o n M e t h o d
Several reliability measures have been studied by researchers in the context of DCSs, including source-to-multiple-terminal reliability (SMT) [3], the survivability index [14], computer network reliability [15], and multiterminal reliability [16]. SMT and computer network reliability are popular and useful measures for DCSs. The problem with the survivability index is that the computation time for this index is prohibitively large, even for relatively small networks [14]. The multiterminal reliability algorithm works well as long as there are not too many alternate paths between source and destination pairs. However, these reliability analyses are not directly applicable to the reliability analysis of DCSs without appropriate modification.
In this paper, to speed up the proposed heuristic algorithm, we present a new reliability evaluation method, which we call the K-tree disjoint reduction method, that employ different concept to efficiently compute the KNR. It is based on the K-tree disjoint reduction method, which reduces immediately disjoint terms and, hence, reduces the computation time.
Consider the simple DCS in Figure 3. There are four processing elements
(X1,X2,X3,X4)
connected by links el,e2,e3, e4, and e5. Let nodes X1 and X2 be the starting node set in42 R.-S. CnEN et
al.
X2
Xl ~ ~ % ~ X 4
e2 " % ~ e 5
X3
Figure 3. A simple distributed computing system. X2
K2-tree
Xl ~ 4e 2 " ~ e 5
T1 T2 T3
Figure 4. The K2-tree with K2 = {X1, X2} in simple DCS.
the DCS. We can identify some Ka-trees with K2 = {X1, X2} rooted on X1 from the DCS in Figure 4 as follows:
(1) x~ el X2 ... 7'1
(2) X 1 e2 X3 e3 X2 . . . T2 (3) X1 e2 Z 3 e5 X4 e4 X2 . . . T3 K2 = { Z l , X 2 }R (Gk2)
= Pr (T1 tO T2 tO T3)= disjoint terms
Ok2.
We get three K2-trees T1, T2, and T3 with K2 = {Xl, X2} in Figure 4, where
R(Gk2)
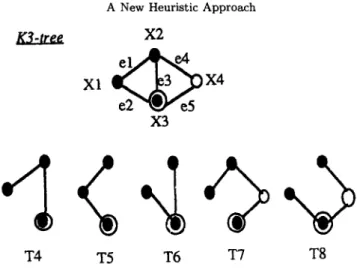
is theprobability of the K2-tree and DK2 is the total disjoint terms of the K2-tree. Consider Step 3 of the proposed heuristic algorithm. In Figure 5, we add node X3 to the starting-nodes set. The disjoint terms of the K3-tree axe Ta, Ts, T6, TT, and Ts. Therefore, the probability of the
K3-tree is
R(Gk2
U {X3} ) = Pr(T4 U T5 U T6 U T7 U Ts), equal to Pr{Dk2 f-I [U path (X3 ---* g2)]}.The disjoint terms of U path (Xa --+ K2) = e2 tO e3 U e4e5 are much less than the expansion of
(Ta tO T5 tO T6 tO T7 to Ts), since
Dk2
N [ U path (X3 -+ K2)] will generate less and shorter disjointterms, and (T4 U T5 U T8 U T7 tO Ts) generate on exponential increase in disjoint terms as the size of the K-trees increases. So the proposed algorithm can save much execution time when the DCS is large.
The expanded terms of (T4 tO T5 U T6 to T7 tO Ts) may contain some nodes in common, since they are not mutually exclusive in general. When the nodes are completely reliable, Dk2 fq [tO path (X3 --* K2)] can generate fewer and shorter disjoint terms to evaluate KNR. directly, because the
X2 XI ~ ~ ' 3 ~ X4 e2 ~"~Y e5 X3
4q+4
"1"4 T5 T6 T7 T8Figure 5. T h e Ka-trees with K3 = {X1,X2,X3} in simple DCS.
terms generated in the expansion of Dk2 n [U path ( X 3 --4 K2)] use the K-tree disjoint reduction method and the AND operator.
R (Gk2 U {X3}) = Pr (T4 U T5 U T6 U T7 U Ts)
. . . . Pr {Dk2 N [U path (X3 --* K2)]}, where U path ( X 3 -"+ K2) = e2 U e3 U e4e5.
Now we define several rules for finding U Path (Xi --* Kj) as follows:
D E F I N I T I O N .
p o = P : = P? =
p / 3 + l ~-~
all
thepaths from Xi to
{Xs}all
thepaths from Xi to {Xs, $1 }
all
the pathsfrom Xi to {Xs, $1, $2 }
{PJ I not include X(j+l) path } U {P^J I include
S(j+l ) path, but, delete
string behind
S(j+I)}N u m e r i c E x a m p l e o f K - T r e e D i s j o i n t R e d u c t i o n M e t h o d
We use the DCS shown in Figure 6 as an example to show how the U path (X3 --~ K2) works. STEP 1. Select node X1 as the starting-node, then generate from the other nodes all path sets pO, p O pO to the starting node as follows:
X2
Xs=X1
X1 e ~ " X4 / e 5
X3
Figure 6. A simple DCS with X8 = X1.
pO: /* All the paths from X2 to X1 */ (1) X2 el X 1
(2) X2 e3 X 3 e2 X1 (3) X2 e4 X4 e5 X3 e2 X1
44
R.-S.
CHENet al.
pO: /* All the paths from X3 to
X 1 */(1) X3e2Xl
(2) X3 e3 )(2 el Xl
(3) X3e5X4e4X2elX1
pO: /* All the paths from )(4 to X1 */
(1) X4e4X2elX1
(2) X4e5X3e2X1
(3) X4 e4 X2 e3 X3 e2 X1
(4) X4 e5 X3 e3 X2 el X1
STEP 2. Select node X2 to add to the starting-node set {X1, X2} as show in Figure 7.
X2
S1 =x2
X1 ~
~
X
4
e2 ~ O / e
5
X3
Figure 7. A simple DCS with the starting-node
set {X1, X2}.P31: /* All the paths from X3 to {X1,X2} are equal to tA path (X3 --* K2) is easily generate
from pO
,/
(1) X3e2Xl
(2)
X3e3X2
(3) X3e5X4e4X2
P~: /* All the paths from X4 to {X1, X2} are equal to U path (X4 ~ / ( 2 ) is easily generated
from pO , /
(1) X4e4X2
(2) X4 e5 X3 e2 X1
(3) X4e5X3e3X2
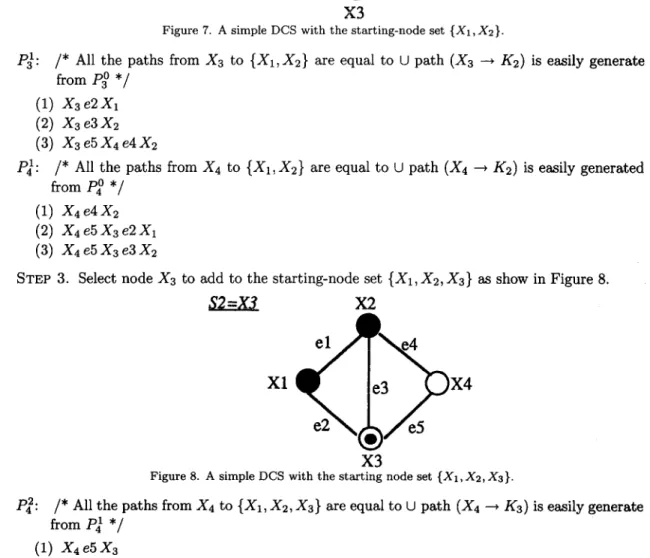
STEP 3. Select node X3 to add to the starting-node set {X1, X2, X3} as show in Figure 8.
S2=X3
X2
X1 ~
I
X
4
X3
Figure 8. A simple DCS with the starting node set {X1, X2, Xa}.
P42: /* All the paths from X4 to {XI, X2, X3} are equal to t_J path (X4 --~ K3) is easily generate
from P~ */
(1) X4eSX3
(2) x4 e4 x2
EXAMPLE. Consider again the six-node DCS with eight links depicted in Figure 1. Using a
C computer program based on the proposed heuristic algorithm, we obtain the result shown in
A New Heuristic Approach 45
Figure 9. The selecting node depending on maximum [R(Gk)*
~,x, ez,: C, Xi].
The algorithmtakes 1 clock cycle of execution time on an Intel-486 personal computer. Obviously, although it gets a suboptimal solution, the algorithm saves much execution time compares with the exact
method [12]. The K-DCS topology with node vector
(X1,Xa, Xs)
was found in the DCS withmaximum reliability of 0.7532 and total capacity of 75 under a capacity constraint of 70 units.
Xs=XI
X2= j: 3 . 1 / / I ~ ~
Figure 9. The result of the heuristic algorithm for the DCS in Figure 1.
5. S I M U L A T I O N A N D A N A L Y S I S
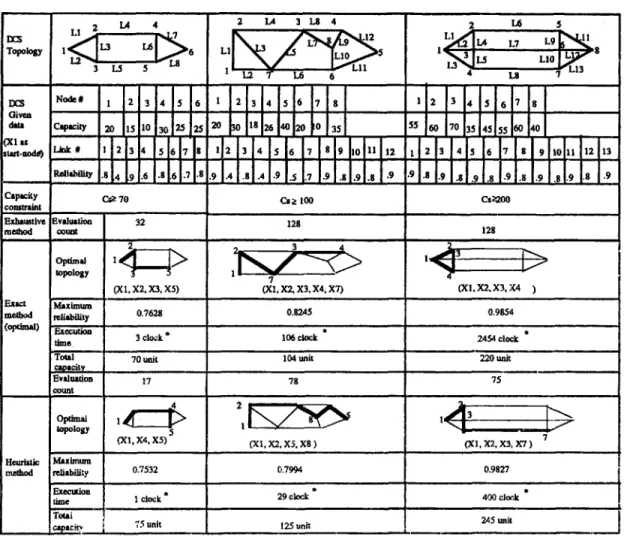
In order to evaluate the performance of our heuristic approach, we applied the proposed algo- rithm to a wide variety of DCS problems. The execution time results for the heuristic algorithm were compared with those for the exact method [12]. Reliabilities of the K-node DCS were evaluated by applying the K-tree disjoint reduction method and SYREL [13]. To verify the effi- ciency of our algorithm, simulation programs were implemented in C programming language on an Intel-486 P C / A T . A portion of the simulation results are depicted in Table 1.
From the simulation results, it is evident from the table t h a t the nature of the optimal design of a DCS depends on the DCS topology. Unlike computer network reliability problems, which are static-oriented, the K N R problems in the DCS are dynamic-oriented, since many factors (node capacity, DCS topology) can greatly affect the efficiency of the algorithm [17]. Thus it is very difficult to quantify the time complexity exactly. The proposed heuristic algorithm employs a new approach to the K-tree disjoint reduction method, which effectively speeds up the whole reliability evaluation. A comparison can be made based on the immediately disjoint term. From such a comparison, one can tell approximately how much space and execution time units axe required for a particular DCS. The heuristic method saves more execution time t h a n the exact method for a large DCS, and its complexity of only 0 ( 2 e * N 2) is better t h a n the O(2 e • 2 n) of the exact method, where e is the number of edges and n is the number of nodes.
It seems t h a t the proposed algorithm is straightforward and reasonable. The K-tree disjoint reduction method generates fewer disjoint terms t h a n traditional reliability index as such as source to multiterminal reliability [3] and multiterminal reliability [16]. For example, assume
t h a t po is generated, it implies t h a t p1, /~2,.. ., ~
pj+l
all can be easily generated from pO tokeep the whole system operational. But in the traditional reliability index, the expanded terms of the K-trees m a y contain some nodes in common, since they are not mutually exclusive in general. W h e n the nodes are completely reliable, Dk2 N [U path (X3 --* /(2)] can generate less and shorter disjoint terms to evaluate K N R directly, because the terms generated in the expansion of
Dk2 N [U
path (X3 --* /(2)] use the K-tree disjoint reduction method and the AND operator. Thus, the heuristic algorithm takes less computer time t h a n the optimal exact and exhaustive method on various DCS topologies which are listed in Table 1. From the results, we find t h a t our46 R.-S. CHEN e t al.
Table 1. Optimal designs for various DCS topologies.
L4 4 L2 ~'~LI 2 l ~ L 3 L6 7 6 3 1,5 5 2 IA 3 1,8 4 l 2 A2 I . ~ L 4 1 i ~L/ ~ L I I t J ~ . * L2 T L6 6 4 [.6 $ L9 L7 LIO I T L ~ 3 L/C.... !.8 7 L13 C~ 70 (35> 100 [ C $ ~ 0 0 128 ] 128 32 , f 5 (x Z, X2, X3, X5) 0.7628 3 clock * 70 unit 17 7 4- (XI, X2, X3, X4, X7) (XI, X2, X3, X4 ) 0.8245 [ 0.9854 106 clock 2454 clock 104 trait 220 unit 78 75
(XI, X4, XS) (XI, X.2, XS. X8 ) (XI, X2, X3, X7 ) 7
0.7532 I 0.7994 I 0.9827
1 clock * I 29 clock " [ 4 ~ ci~.k °
i 75 unit I 125 unit I 245 unit
algorithm performs more efficiently than the exact and exhaustive m e t h o d in all cases and can easily be transformed into a computer program. Thus, it is an optimal design for large DCSs.
6. C O N C L U S I O N
Distributed computing systems have become very popular for their high fanlt-tolerance, poten- tial for parallel processing, and reliable performance. One of the important issues in the design of a DCS is reliability. In this paper, we have presented a heuristic algorithm that uses the K - t r e e disjoint reduction method to determine the optimal K-nodes in a DCS so as to maximize the K N R under a capacity constraint. Traditional reliability indexes such as source-to-multiterminal reli- ability [3], survivability [14], multiterminal reliability [16], and so on, are not directly applicable for the analysis of distributed reliability in a DCS. Thus, a new approach for the optimal design K - n o d e s of the DCS must be developed.
T h e proposed heuristic algorithm is based on a systematic node selection approach t h a t deter- mines the optimal design of a DCS by maximizing the K N R under a capacity constraint. Because we apply straightforward heuristic rules, our algorithm generates fewer disjoint terms t h a n tra- ditional reliability indexes such as source to multiterminal reliability and requires less execution time and space t h a n the exact and exhaustive method [12]. We conclude t h a t our algorithm is an efficient tool for finding an optimal design for large DCSs.
A New Heuristic Approach
R E F E R E N C E S
47
1. V.K. Prasnna Kumar, S. Hariri and C.S. Raghavendra, Distributed program reliability analysis, IEEE
Trans. Software Eng. 12 (1), 42-50 (1986).
2. A. Kumar, S. Rai and D.P. Agrawal, Reliability evaluation algorithms for distributed systems, In Proc.
IEEE INFOCOM 88, pp. 851-860, (1988).
3. A. Satyanarayna and J.N. Hagstrom, New algorithm for reliability analysis of multiterminal networks, IEEE
Trans. Reliability 30, 325-333 (1981).
4. D.J. Chen and T.H. Huang, Reliability analysis of distributed systems based on a fast reliability algorithm,
IEEE Trans. on Parallel and Distributed Systems 3 (2) (1992).
5. L. Fratta and U.G. Montanari, Synthesis of available networks, IEEE Trans. Reliab. R-25, 81-87 (1976). 6. R.S. Wilkov, Design of computer networks based on a reliability measure, In Proceedings of the Symposium
on Computer Communication. Networks and TeletrajI~ics, pp. 371-384, (1986).
7. E.L. Lawler and M.D. Bell, A method for solving discrete optimization problems, Ops. Res. 14, 1098-1111 (1966).
8. J.A. Stankovic, A perspective on distributed computer systems, IEEE Trans. Comput. 33, 1102-1115 (1984). 9. K.K. Aggarwal, Y.C. Chopra and J.S. Bajwa, Topological layout of links for optimizing the S-T reliability
in a computer communication system, Microelectron. Reliab. 22, 341-345 (1982).
10. K.K. Aggarwal, Y.C. Chopra and J.S. Bajwa, Topological layout or links for optimizing the overall reliability in a computer communication system, Microelectron. Reliab. 22, 347-351 (1982).
11. Y.C. Chopra, B.S. Sohi and K.K. Aggarwal, Network topological for maximizing the terminal 1 reliability in a computer communication system, Microelectron. Reliab. 24 (5), 911-913 (1984).
12. R.-S. Chen, D.J. Chen and Y.S. Yeh, Reliability optimization of distributed computing systems subject to capacity constraint, Computers Math. Applic. (to appear).
13. S. Hariri and C.S. Raghavendra, SYREL: A symbolic reliability algorithm based on path and cutset methods, USC Tech. Rep., (1984).
14. R.E. Merwin and M. Mirherkerk, Derivation and use of survivability criterion for DDP systems, In Proc.
1980 Nat'l. Computer Conference, pp. 139-146, (1980).
15. K.K. Aggrawal and S. Rai, Reliability evaluation in computer-communication networks, IEEE Trans. Reli-
ability 30, 32-35 (1981).
16. A. Grnarov and M. Gerla, Multiterminal reliability analysis of distributed processing system, In Proc. 1981
Int'l. Conf. on Parallel Processing, pp. 79-86, (1986).
17. D.-J. Chen and M.S. Lin, New reliability evaluation algorithms for distributed computing system, Journal

![Figure 9. The selecting node depending on maximum [R(Gk)* ~,x, ez,: C, Xi]. The algorithm](https://thumb-ap.123doks.com/thumbv2/9libinfo/7689819.143163/9.810.246.555.239.506/figure-selecting-node-depending-maximum-gk-xi-algorithm.webp)