Design of Fuzzy Based Iterative Learning Controllers for Induction Motor Drives
Tsao-Tsung Ma
Member, IEEE
Dept. of EE, CEECS, National United University 1 Lien-Da, Miaoli City
MIAOLI6003, TAIWAN [email protected]
Ming-Han Lee
Dept. of EE, CEECS, National United University 1 Lien-Da, Miaoli City
MIAOLI6003, TAIWAN [email protected]
Abstract -- This paper investigates the feasibility and performance of applying fuzzy based iterative learning control algorithms in special control applications of induction motors.
Based on different motor operating conditions, two control schemes are studied, i.e., proportional plus various iterative learning control algorithms (P+ILC) and proportional-integral plus various iterative learning control algorithms (PI+ILC) with the aid of on-line parameters tuning using a fuzzy controller.
The performances of the proposed control schemes are compared with the conventional P- and PI-type controllers in terms of speed tracking errors and robustness when a periodic disturbance is encountered. In hardware implementations, several complex computational and signal processing tasks are accomplished using the TI DSP2812 chip. The simulation tasks and hardware implementation of controllers with various test examples are carried out via a personal computer, DSP and the VisSim software environment. Both simulation and experimental results are presented to show the performance of the proposed control scheme.
Index Terms-- iterative learning control, fuzzy algorithms, induction motors.
I. INTRODUCTION
The induction motors having a number of intrinsic advantages, e.g., rugged, reliable, low cost and simple hardware structure have been widely used in various industrial driving systems. From the mathematical point of view, the induction motor with the stator and rotor energy loops is a highly nonlinear and coupled system. In the past, it was not an easy task to achieve high-level servo control using AC induction motors; therefore, its applications were limited to simple driving operations. In recent years, the fast development in power semiconductors, DSP chips and high- performance microprocessors has made the possibility of using the induction motors in designing advanced driving and control applications. Basically, with the use of vector control technologies, the design of high-performance servo control system on AC induction motors can be achieved as easy as that on DC motors [1-4].
Although there are many studies regarding the design of servo control systems using AC induction motors reported in the open literature, new control means to improve the overall control performance are still call for investigations, especially when special or difficult operating conditions are met.
Periodic operating signals are frequently encountered in industrial applications such as rotational machinery and robot
controls. There are many industrial control applications, which require compensating periodic signals, e.g., either tracking periodic reference or rejecting periodic disturbances.
Good examples of periodic reference signal tracking include, for example, servo control systems [5-6], where high precision tracking performance for a periodic reference is required, control of robot manipulators, where tracking the desired periodic trajectory is required [7-8]. In normal application cases, the most widely used speed controller is the conventional PID controller due to its simplicity from both design and parameter tuning points of view. However, a conventional PID type controller can not provide a high performance in control especially when the control task is tracking a periodic signal with periodic disturbances. To solve the above mentioned problem, this paper presents the analysis and design of novel speed control schemes using the iterative learning control (ILC) and the fuzzy theory [9-14]
for the ac induction motor drives.
The original idea about ILC was proposed in 1978 [15-18].
The fundamental concept of ILC is to learn by the experiences of control actions so that the control systems can be self-adjusted. Because there are many restrictions in the application of ILC, it was not widely applied. As addressed previously in the abstract, in the aspect of developing new controllers, this paper investigates two control schemes for the AC induction motors: (1) proportion (P) controller combined with various ILC and (2) PI or PD controller combined with various ILC. In both control schemes a fuzzy controller is used to tune the ILC parameters on-line. In the hardware implementations, the DSP (TI2812) is used as the kernel of controlling induction motor so that the complexity of interface circuit can be reduced. A set of comprehensive simulation tasks and hardware verifications of controllers with various test examples are carried out via a personal computer, DSP and the VisSim software environment. Both simulation and experimental results are presented to show the performance of the proposed control scheme.
II. MODELLING AND CONTROLLER DESIGN A. The Dynamic Model of Induction Motors
The basic concept in the field oriented vector control (FOVC) of AC induction motors is to make use of two components, magnetic current and torque current, to achieve
PEDS2009
the desired control objectives. The main control idea of FOVC is to use the technique of coordinate conversion to convert the three-phase, time-varying AC variables in synchronous rotating coordinate to the equivalent two-phase d-q axes DC values. This follows that through the control of the value of slip the vector of rotor flux can be fixed on the d- axis. Then the torque of motor can be controlled by adjusting the magnitude of q-axis current. In this way, the AC induction motor can be controlled easily just like the control of the DC motor. The dynamic equation of AC induction motor can be written as bellow, in which the stator currents ( i and
dsi ) and the rotor flux (
qsλ
dr, λ
qr) are set as state parameters under the d-q axes:
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡ +
⎥⎥
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢⎢
⎢
⎣
⎡
⎥⎥
⎥⎥
⎥⎥
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢⎢
⎢⎢
⎢⎢
⎢
⎣
⎡
−
−
−
−
−
− − +
−
− + −
−
=
⎥⎥
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢⎢
⎢
⎣
⎡
0 0 1
) ( 0
0 1 ) ( )) 1 ( (
qs ds
s qs ds qs ds
r r r r
r m
r r r r
r m
r r s
r m r s
r m r s s
r s
r m r r s
r m r
r s s
qs ds qs ds
v v L i i
L R L
R L
L R L
R
L LLL
R L L L L T L R
L L L L L L
R L L
R L R
i i
σ λ λ ω
ω
ω ω σ σ
ω σ
σ ω σ
σ ω ω σ
σ σ σ
λ
ρλ
(1)
where,
ω : synchronous angular velocity
r s
m
L L
L
21 −
σ = : coefficient of the leakage flux
λ
dr, λ
qr: rotor flux under d-axis and q-axis R ,
rR : rotor resistance and stator resistance
sL ,
rL : rotor inductance and stator inductance
sL : mutual inductance between rotor and stator
mρ : differential operator ω
r: angular velocity of rotor
Assuming that under steady-state, i.e. the changes of λ
drand λ
qrare zero, the following equations can be derived from (1):
qr r dr
r r ds r
r m
L i R L
R
L λ ( ω ω ) λ
0 = − + − (2)
qr r r dr r qs
r r m
L i R
L R
L − ω − ω λ − λ
= ( )
0 (3)
By (2) and (3), the rotor flux under d-axis and q-axis can be calculated:
2 2 2 2
) (
) (
r r r
qs r m r r ds
r m
dr
L R
i L L R i
R L
+
−
−
= −
ω ω
ω
λ ω (4)
2 2 2 2
) (
) (
r r r
ds r m r r qs
r m
qr
L R
i L L R i
R L
+
−
−
= −
ω ω
ω
λ ω
(5)
Given the slip ω
slas:
dr r
qs m r ds qs r r r e
sl
L
i L R i i L R ω λ ω
ω = − = = (6)
The electromagnetic torque can be calculated from (5) and (6) as:
) 2 (
2 3
ds qr qs dr
e
P i i
T = λ − λ (7)
(7) can be further simplified into (8).
qs dr r m
e
i
L L
T P λ
2 2
= 3 (8) Based on the vector control theory, if both the slip velocity (6) and the rotor flux λ
drfixed on the d-axis can be kept as constant, the electromagnetic torque of the induction motor can be controlled by the magnitude of q-axis stator current component.
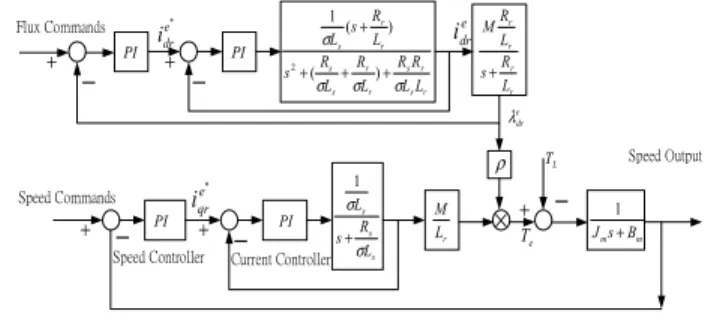
Fig. 1 is the general vector control structure of AC induction motor.
PI PI
PI
s s s
L s R
L σ σ + 1
r r r r
L s R
L MR
+
r s
r s r r s s
r r s
L L
R R L R L s R
L s R L
σ σ σ
σ + + +
+ ) (
) 1(
2
PI
Lr
M
m
ms B
J +
× +
−
1 TLTe e*
iqr
+
−
ρ Speed Commands
Speed Controller Current Controller
e
λdr
e
idr e*
idr
Speed Output Flux Commands
+ +
+
− −
−
Fig. 1. Vector control structure of an AC induction motor
B. Iterative Learning Control
z The Restrictions in Applying ILC
ILC produces the required current control input based on the previous control experience. The whole learning structure is constructed and performed on the continuously adjusting loops. The present adjustment is based on the error of previous control result. In practical applications, ILC has the following restrictions:
(1) : The system will be stopped at a limited time, T ,
> 0 T .
(2) : The dynamics of system should be in consistent in every repeated operation.
(3) : The initial state x
i( 0 ) of every repeated operation is equal to the expected ideal initial state, x , i.e.,
0)
00
( x
x
i= , i = 0 , 1 , 2 ,... . The i is the number of times of repeated learning operation.
(4): The system can be repeated and the ideal output, y
d(t ) , is only caused by the input, u
d(t ) . (5): The present learning output, e
i( t ) = y
d( t ) − y
i( t ) , can
be applied in the next times’ input u
i+1( t ) .
(6): The system must be able to get the ideal output at
] [ T
t ∈ 0 , .
According to the above restrictions, the ILC control law
PEDS2009
can be found as following:
)) ( ), ( ( )
1
( t f u t e t
u
i+=
i i,and lim
→∞e
i( t ) = 0
t
.
Before the structure of ILC is addressed, the output value of the main controller, u
kp(t ) , should be firstly assumed. In this control case, the u
kp(t ) is transferred to ILC and then the ILC can calculate its u
ik+1( t ) . Adding up u
k+i 1( t ) and u
kp(t ) the control signal, u
k(t ) , can be calculated. The mathematic model of P-type ILC can be expressed as follows:
) (t e
u
kp= β ⋅
k(9)
) ( )
( )
( t u
1t L u t
u
kpi k i
k
=
−+ ⋅ , k > 0 (10)
p k i k
k
t u u
u ( ) = + (11)
where, β is the main controller; L is the gain; k is the number of iterations, e
k( t ) = y
d( t ) − y
k( t ) . Here, if (12) is used to replace (10) the controller of PD-type ILC can be obtained. Similarly, the PI-type ILC can be readily constructed by modify the last term of (12).
) )
( ( ) ( )
(
ik1 p kp d kpi
k
u
dt L d t u L t u t
u =
−+ + (12)
Again, L ,
pL are gains and k is the number of iterative
doperations.
z T-S Fuzzy Systems
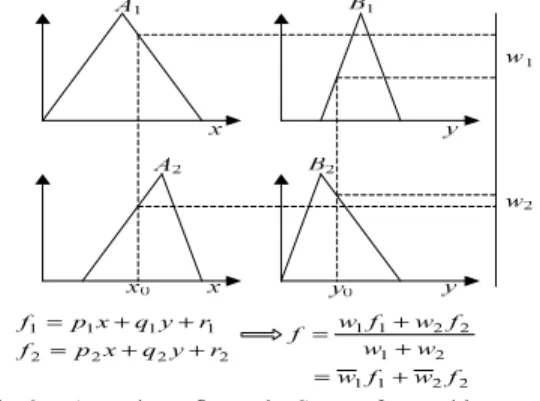
For a T-S fuzzy system with two inputs and a single output, the fuzzy rules are given by (13). To address the inference system of a T-S fuzzy model, Fig. 2 illustrates the result of fuzzy inference as given in (14).
1 1 1 1 1 1 1
2 2 2 2 2 2 2
: if is and is then : if is and is then
R x A y B z f p x q y r
R x A y B z f p x q y r
= = + +
= = + + (13)
1 1 2 2
1 1 2 2
1 2
w f w f
f w f w f
w w
= + = +
+ (14)
Where
1 11 2
w w
w w
= + and
2 21 2
w w
w w
= + , w can be the lower
ione or the product of A and
iB as expressed in (15).
i( ) ( )
( )
( ) ( )
min ,
i i i
i i i
w A x B y
w A x B y
=
= × (15)
i
i
r
f
z = = (16)
z T-S Fuzzy System Design on PSO
Fuzzy controllers belong to the field of intelligent control which are based on soft computing algorithms. The main advantage of using fuzzy controllers in various industrial applications is that the experts’ experiences and other heuristic methods can be applied to obtain a satisfactory performance without the detailed mathematical model of the controlled plant. In this study, the PSO is used to determine the consequent membership functions of the fuzzy controller,
while the corresponding antecedent membership functions are assigned to suit the controlled parameters of the systems. In this design case, the rules are to be designed by the PSO algorithm.
2 2 2 2
1 1 1 1
r y q x p f
r y q x p f
+ +
=
+ +
=
2 2 1 1
2 1
2 2 1 1
w f w f w w
f w f f w
+
= +
= +
Fig. 2. A two-input first-order Sugeno fuzzy with two rules
1) Design of antecedent membership functions
In this control case, the fuzzy controller has two inputs, e and de, and one output. The membership functions of both fuzzy inputs are illustrated in Fig. 3. The ranges of inputs are defined at [-0.3, 0.3]. Here, two types of membership functions, trapezoidal and triangular types are used. The input, e, has seven membership functions. The membership functions of far left and right are assigned with trapezoidal types, or alternatively with trapezoidal types. The input, de, is designed with five membership functions. All the membership functions for de are triangular types. The equations describing the trapezoidal and triangular types are respectively shown in (17) and (18).
Fig. 3. Inputs, e and de, of fuzzy system
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
≤
≤
− ≤
−
≤
− ≤
−
≤
=
x r ,
r x , u l r
x r
u x , l l u
l x
l x , f(x;l,u,r)
0 0
(17)
PEDS2009
⎪⎪
⎪⎪
⎩
⎪⎪
⎪⎪
⎨
⎧
≤
≤
− ≤
−
≤
≤
≤
− ≤
−
≤
=
x r ,
r x , ru ru r
x r
ru x lu
lu x , l l lu
l x
l x ,
ru,r) f(x;l,lu
0 , 1 0
,
(18)
2) Design of rules
To decide the rules without depending on expert’
experiences, all of the rules are given their own consequence membership functions as sh
own in Table I.3) Design of consequence membership functions
As can be seen in Table I, every rule has its own membership function. In this study, the PSO algorithm is used to search the membership functions. Equation (19) presents the parameters to be decided by PSO. For zero-order equations, MFi = ri where i =1, 2, 3…35.
[ r
1, r
2, r
3..., r
35]
p = (19) In some control cases, the consequence membership
functions have symmetry property. One can take advantage of this characteristic to reduce the number of parameters searched by PSO and to reduce the computation time. The arrangement is briefly expressed in (20).
TABEL I FUZZY RULES TABLE
Vqref e
mf1 mf2 mf3 mf4 mf5 mf6 mf7
de
N MF1 MF6 MF11 MF16 MF21 MF26 MF31 NS MF2 MF7 MF12 MF17 MF22 MF27 MF32 ZE MF3 MF8 MF13 MF18 MF23 MF28 MF33 PS MF4 MF9 MF14 MF19 MF24 MF29 MF34 P MF5 MF10 MF15 MF20 MF25 MF30 MF35
[
1 2 3 17]
18 36 i
..., , ,
0
= MF
3...17 2, 1,
= i , i - MF -
= MF
r r r r
p = (20)
z The Concept of Controller Design
Fig 3. shows the main control structure proposed in this paper which composes the P or PI controller and ILC.
Because the proposed control system is designed to counter act the periodic disturbances by continuously adjusting the ILC’s output, the fuzzy block is used to tune the gain of ILC on-line so that the convergent velocity can be speeded up.
The fuzzy can be used to tune the gain of ILC if the switch, SW, shown in Fig. 3 is closed.
III. S
IMULATION ANDE
XPERIMENTALR
ESULTSThe hardware implementation of the proposed control structure for the AC induction motor is shown in Fig. 4. In
simulation studies, the personal computer and VisSim software are used; while in the experimental tests, the JTAG interface is utilized to communicate the controlled induction parameters and control commands with the DSP.
Fig. 3 The structure of speed control which composes the ILC and fuzzy
A. Simulation Results
To verify the feasibility and correctness of the proposed controller, the fuzzy and the related ILC controllers are modeled in Visual C++ languages and induction motor is modeled in VisSim environment for simulative and experimental studies. In the cases of simulations, the P or PD controllers are attempted to work with ILC and the fuzzy function is used to tune the gain of ILC on-line.
Simulated case 1:
In this simulation case, four control structures, i.e., control structure 1 (conventional PI controller), control structure 2 (conventional P controller + P_ILC), control structure 3 (conventional P controller + PD_ILC) and control structure 4 (conventional P controller + P_ILC + fuzzy) are tested to compare their performances. The command and parameters of the controller are given as follows: periodic step-type speed command tracking n = 600 rpm , TL = 0.5 n-m, and kp = 15 . A periodic disturbance, TL = 0.2 n-m, is added to the motor at every half of the speed command cycle. Some typical simulated results of case 1 and 4 are respectively presented in Fig. 5 and 6. As one can see from the presented results, the case 4 with the gain of ILC on-line tuned by using fuzzy controller has much better anti-disturbance effects. The results are achieved within only 5 periods. It is also found that a higher convergent velocity can be obtained by the P type ILC.
Simulated case 2:
In this simulation case, two control structures, i.e., control structure 1 (conventional PI controller) and control structure 2 (conventional PI controller + PI_ILC+Fuzzy) are tested to compare their performances. The command and parameters of the controllers are given as follows: the speed tracking command is sine wave with n = 600 rpm , TL=0.5 n-m,
= 3
kp and ki = 0 . 001 . As can be seen from Fig. 7 and 8 with the proposed controller, the tracking error can be reduced to zero within only three cycles.
PEDS2009
Inverter SVPWM
DA
IM
λ*+
−
+
−
+
+
−
−
e
λdr
e*
idr Vdse
c b a
V V V
e
Vqs e*
iqr
*
ωm
ωm
e
idr
e
iqr
b a
I I
2812 DSP
controller PI
controller PI
current axis d
current axis q
C B A Q D, , ,
Angle
compute Magnetic
computer
C B A Q D, , ,
Fig. 4. the structure of AC induction motor’s speed control
B
AB
AFig. 5. (PI) Command of speed tracking (A) and actual output (B)
A
B A
B
Fig. 6. (P+P_ILC+fuzzy) Command of speed tracking (A); actual output (B)
A B
A
B
Fig. 7. (a) (PI) command of speed tracking (A); actual output (B)
Fig. 7. (b) (PI) error of speed tracking
Fig. 7. (c) (PI) iq current
A B
A
B
Fig. 8 (a) (P+P_ILC+fuzzy) command of speed tracking (A); actual output (B)
Fig. 8 (b) (P+P_ILC+fuzzy) Error of speed tracking
Fig. 8. (c) (P+P_ILC+fuzzy) iq current
z Experimental Results
To further confirm the feasibility and effectiveness of the proposed ILC schemes presented in the previous sections, the hardware implementations and tests of the controllers based on DSP are presented in this subsection. Experimental case 1 uses the same condition as that of simulation case 1. The related measured results concerning control structure 1 and 4 (presented in the simulation studies) are respectively presented in Fig. 9 and 10. The experimental study of case 2 uses the same conditions as that of the simulation case 2. Fig.
11 and 12 respectively present the measured control results.
In these figures, the ratio of measured parameters are 1V : 25V for the measured voltage : actual voltage and 1V : 0.5A for the measured voltage : actual current.
V
1 10 sec
A
B
V
1 10 sec
A
B
Fig. 9. (PI) Command of speed tracking (A); actual output (B)
V
1 10 sec
A B
V
1 10 sec
A B
Fig. 10. (P+P_ILC+fuzzy) Command of speed tracking (A); actual output (B)
sec V 10
1 A
B
sec V 10
1V 10 sec
1 A
B
Fig. 11. (a) (PI) Command of speed tracking (A) and actual output (B)
PEDS2009
sec V 10
2 .
0.2 V 10 sec
0
Fig. 11. (b) (PI) Error of speed tracking
sec 10 V
2
V 2 . 0
A
B 10 sec
V 2
V 2 . 0
sec 10 V
2
V 2 . 0
B A
Fig. 11. (c) (PI) Motor voltage(A) and current (B) waveform
V 1
sec 10
A
B
V 1
sec 10
A
B
Fig. 12 (a) (P+P_ILC+fuzzy) Command of speed tracking (A); actual output (B)
sec 10 V
2 . 0
sec 10 V
2 . 0
Fig. 12. (b) (P+P_ILC+fuzzy) Error of speed tracking
sec 10 V
2
V 2 . 0
A B
sec 10 V
2
V 2 . 0
sec 10 V
2
V 2 . 0
A B
Fig. 12. (c) (P+P_ILC+fuzzy)Motor voltage(A) and current (B) waveform
IV. C
ONCLUSIONIn this paper, a number of ILC control structures applied to the design of advanced induction motor drives, especially when the periodic disturbances are taking into account are investigated. The design methods and performance of the proposed control schemes have been verified with simulation and experimental tests. Of the feasible control structures, the integration of ILC and the conventional P-type or PI-type controller and on-line tuned by fuzzy control algorithms can efficiently suppressed the periodic disturbances and the lagging phenomenon in sine wave speed tracking.
R
EFERENCES[1] Jadot, F., Malrait, F., Moreno-Valenzuela, J. and Sepulchre, R, K.,
“Adaptive Regulation of Vector-Controlled Induction Motors,” IEEE Transactions on Control Systems Technology, vol. 17, no 3, pp. 646- 657, 2009.
[2] Sen, P. C., “Electric motor drives and control - past, present, and future,” IEEE Trans. Indus. Elec., vol. 37, no. 6, pp. 562-575, 1990.
[3] Khalil, H.K., Strangas, E.G.and Jurkovic, S., “Speed Observer and Reduced Nonlinear Model for Sensorless Control of Induction Motors ,” IEEE Transactions on Control Systems Technology, vol. 17, no 2, pp. 327-339, 2009.
[4] Yonghui Xia, Zijiang Yang, and Maoan Han, “Lag Synchronization of Unknown Chaotic Delayed Yang–Yang-Type Fuzzy Neural Networks With Noise Perturbation Based on Adaptive Control and Parameter Identification,” IEEE Trans. Neural Networks, vol. 20, no. 7, pp. 1165- 1180, July 2009
[5] Yang Yi, Lei Guo, Hong Wang, “Adaptive Statistic Tracking Control Based on Two-Step Neural Networks With Time Delays,” IEEE Trans.
Neural Networks, vol. 20, no. 3, pp. 420-429, March 2009.
[6] Sadegh, N and Guglielmo, K., “Design and implementation of adaptive and repetitive controllers for mechanical manipulators,” IEEE Transactions on Robotics and Automation, vol. 8, no. 3, pp. 395-400, 1992.
[7] Sugar, T. G., Jiping He, Koeneman, E. J., Koeneman, J. B., Herman, R., Huang, H., Schultz, R. S., Herring, D. E., Wanberg, J., Balasubramanian, S., Swenson, P., and Ward, J. A., “Design and Control of RUPERT: A Device for Robotic Upper Extremity Repetitive Therapy,” IEEE, Neural Systems and Rehabilitation Engineering, vol.
15, no. 3, pp. 336-346, Sept. 2007.
[8] Uchiyama, M., “Formations of High Speed Motion Pattem of Mechanical Arm by Trial,” IEEE Transactions of the Society of Instrumentation and Control Engineers, vol. 19, pp. 706-712, 1978.
[9] Arimoto, S., Kawamura, S. and Miyazaki, F., “Bettering operation of robots by learning,” Joumal of Robotic Systems, vol. 1, no. 2, pp. 123- 140, 1984.
[10] Rong Song, Kai-yu Tong, Xiaoling Hu, and Le Li, “Assistive Control System Using Continuous Myoelectric Signal in Robot-Aided Arm Training for Patients After Stroke,” IEEE, Neural Systems and Rehabilitation Engineering, vol. 16, no. 4, pp. 371-379, Aug. 2008.
[11] L. Cai, and W. Hunag, “Fourier base learning control and application to position table,” Robotics and Autonomous system, vol.32, pp. 89-100, 2000.
[12] Wei Zuo, Yang Zhu, and Lilong Cai, “Fourier-Neural-Network-Based Learning Control for a Class of Nonlinear Systems With Flexible Components,” IEEE, Neural Systems and Rehabilitation Engineering, vol. 20, no. 1, pp. 139-151, Jan. 2009.
[13] Liuzzo, S., Marino, R., and Tomei, P., “Adaptive Learning Control of Nonlinear Systems by Output Error Feedback,” IEEE, Automatic Control, vol. 52, no. 7, pp. 1232-1248, July 2007.
[14] S. Arimoto, T. Naniwa, and H. Suzuki, “Robustness of P-type learning control with a forgetting factor for robotic motions,” Proc. 29th IEEE Conf. Decision and control, vol. 5, pp.2640-2645, Dec. 5-7, 1990.
[15] Yongqiang Ye, and Wang, D., “Learning more frequency components using P-type ILC with negative learning gain,” IEEE, Industrial Electronics, vol. 53, no. 2, pp. 712-716, April 2006.
[16] Takagi T, Sugeno M., “Fuzzy identification of systems and its application to modeling and control,” IEEE Trans Syst. Man Cybern 15(1):116-32, 1985.
[17] Meng-Shiun Tsai, Ming-Tzong Lin, and Hong-Tzong Yau,
“Development of command-based iterative learning control algorithm with consideration of friction, disturbance, and noise effects,” IEEE, Control Systems Technology, vol. 14, no. 3, pp. 511-518, May 2006.
[18] Zhang, J. H., Wang, H., “Iterative learning-based minimum tracking error entropy controller for robotic manipulators with random communication time delays,” IET, Control Theory And Applications, vol. 2, no. 8, pp. 682-692, Aug. 2008.