Volume 25, No.3, 2020, pp. 129-148 DOI:10.6574/JPRS.202009_25(3).0001
1 國立屏東科技大學森林系 碩士 收到日期:民國 109 年 03 月 04 日
2 國立屏東科技大學森林系 副教授 修改日期:民國 109 年 04 月 10 日
3 國立屏東科技大學森林系 名譽教授 接受日期:民國 109 年 06 月 20 日
4 國立屏東科技大學森林系 助理教授
* 通訊作者, 電話: 08-7703202 轉 7147, E-mail: [email protected]
地面雷射掃瞄系統於小樣區之立木測計
蕭子淳
1陳建璋
2陳朝圳
3魏浚紘
4*摘要
地面雷射掃瞄儀 (Terrestrial Laser Scanning, TLS) 具非破壞性量測之特性,其點雲可透過視覺化及自 動化方式獲取準確林木性態值。本研究以地面雷射掃瞄儀取得立木點雲資料,探討不同立木胸徑與樹高 之測計方法,並討論不同架站模式及不同掃瞄解析度對樣區點雲生成之影響。結果顯示,光達測得之胸徑 及樹高在人工判釋測計法及半自動化偵測法上均與實測值無顯著差異。另掃瞄解析度為 1/4 (43.70 MPts) 及 1/2 (174.80 MPts) 時,所測計之胸徑、樹高與實測值無顯著差異,而解析度 1/2 (174.80 MPts) 時精度 未上升,故以掃瞄解析度 1/4 (43.70 MPts) 即可取得準確立木胸徑;且掃瞄站數多寡與胸徑、樹高萃取準 確度呈正相關,故架站數應以四站以上為佳。
關鍵詞:地面雷射掃瞄系統、森林調查、自動化測計、點雲資料
1. 前言
傳統森林測計須藉由伐倒標準樣木,以樹幹 解析及區分求積法,取得準確地林木材積及林木 生長量 (楊榮啟及林文亮,2003),如此破壞性計 算除了可能造成提前收穫外,亦影響林地狀況,
又傳統非破壞性調查常因儀器本身量測精度,故 無法量測林木短時間內生長量,且無法準確顯示 林木生長效益,且臺灣森林資源調查相隔時間長,
在大面積地面調查上,需考慮空間性、區域性問 題,易受時間因子導致測量誤差 (劉知妤及王兆 桓,2008)。
隨著科技進步,森林測計結合地理資訊系統 (Geographic Information System, GIS)、遙感探測 技術 (Remote Sensing, RS) 及全球衛星定位系統 (Global Positioning System, GPS) 等技術,廣泛應 用於森林資源調查及土地利用規劃上 (楊榮啟及 林文亮,2003),其中光達 (Light Detection and Ranging, LiDAR) 又稱雷射掃瞄系統為新興之森 林調查技術,屬主動式偵測系統,為非破壞性量
測技術、具多重穿透 (彭炳勳等,2008、Astrup et al., 2014、魏浚紘及陳朝圳,2016)、高準確度及 可重複檢核之特性,其點雲資料 (Point clouds data) 具三維空間資訊,可建立三維立體數值模 型,以瞭解水平與垂直結構上的空間分布,並以 三維模擬方式,獲取準確林木性態值 (Polo et al., 2009、Moorthy et al., 2010),已被認為是可大面 積量化及監測森林最佳技術之一。
雷射掃瞄系統具有高解析度之特性,在現地 測量中,高解析度通常用於記錄距掃瞄位置遠的 物體,如樹頂或距離掃瞄儀遠之立木,故導致靠 近掃瞄儀的物體單位面積點雲數量過多,因此,
地面雷射掃瞄系統之掃瞄需根據森林樣區的大 小、形狀、結構及調查目的的不同進行掃瞄設計 (Liang et al., 2016)。
本研究目的為:
(1) 探討不同點雲資料處理方法對林木性態值測 計之準確度。
(2) 探討地面雷射掃瞄系統不同掃瞄解析度對林 木性態值測計之影響。
(3) 針對掃瞄過程易產生之遮蔽及架站方式進行 討論,以期增進地面雷射掃瞄系統於森林測 計上之準確度。
(4) 探討地面雷射掃瞄系統於森林資源調查上應 用之可行性。
2. 前人研究
2.1 地面雷射掃瞄系統之掃瞄 原理
地 面 雷 射 掃 瞄 系 統 (Terrestrial Laser Scanning, TLS) 是以雷射掃瞄系統配合即時動態 測量之全球衛星定位系統 (Real-Time Kinematic Global Position System, RTK GPS),以固定於地上 某一點之方式進行掃瞄,其雷射測距掃瞄模式為 全景掃瞄模式,是利用單一稜鏡平面旋轉或轉速 快之垂直反射旋轉鏡及較慢的之水平旋轉儀進 行全方位 360°之掃瞄 (Reshetyuk, 2009、Telling et al., 2017)。
雷射掃瞄原理可分為飛行時間法 (Time of Flight) 及相位差法 (Phase Shift),飛行時間法原 理為將雷射脈衝發射至目標物表面,再反射回儀 器之時間差,以得儀器與目標物間相對距離及目 標物表面三維點雲資料(Xu et al., 2017),主要用 於遠距離的測量調查上,其精度高,但易受天氣 狀況之影響。
相位差法之掃瞄原理為透過雷射光照射及 光束幅度識別高頻範圍,計算此範圍之相位差 Δψ,藉此求出與目標物間之距離,因是採用相 位方式,測距的精度較高,然距離越遠,較易受 雜訊影響 (林建忠,1999)。
2.2 地面雷射掃瞄系統之特性
地面雷射掃瞄系統於掃瞄時,係利用相位差 法得出各點雲之相對坐標資訊,並以點之方式記 錄反射強度值 (Intensity, I) 及橫、縱坐標與高程 (Wei et al., 2014、Fabbri et al., 2017),因數量龐大 且分布密集而稱之點雲 (管立豪,2007),可藉由 套疊彩色資訊 (R, G, B) 以接近真實外觀之方式
呈現 (賴志凱,2004)。
固定式地面雷射掃瞄技術,具高精度、高效 率、高自動化、低風險、掃瞄光束小、單位面積 掃瞄密度高及以非破壞性方式在短時間內獲取 大量地表三維資訊之特性 (Polo et al., 2009、
Moorthy et al., 2010、Stovall et al., 2017、Zai et al., 2017) ,且其可視化之點雲數據可有效的進行地 標物之測計,建立具地理坐標系統之三維立體的 林地模型。
2.3 地面雷射掃瞄系統之應用 限制
地面光達在掃瞄時,其限制有遮蔽及架站之 模式差異。常遇之遮蔽現象有掃瞄物體受到自身 之遮蔽,無法得到後方點雲資料之自我遮蔽 (Self-Occlusions)、後方物體,受前方障礙物阻擋,
使 雷 射 掃 瞄 不 到 該 物 體 而 產 生 之 外 界 遮 蔽 (Ambient Occlusions) 與雷射掃瞄時視角的限制,
如俯仰角的限制,造成樹頂點雲資料不足,造成 樹高無法準確獲得之視角遮蔽 (View Occlusions) 三種 (Al-Khedera et al., 2009、Wei et al., 2011)。
遮蔽之改善,可透過多角度掃瞄來增加不同面相 之點雲數 (Al-Khedera et al., 2009),例如 Wei et al. (2011) 研究指出可藉由增加掃瞄站點及點雲 數量,以減少遮蔽問題並獲取完整之點雲資料。
2.4 地面雷射掃瞄系統在森林 地面樣區調查之應用
地面雷射掃瞄系統可提供 0.05-10 cm 高精 度之單株立木表面特徵的三維空間資料,其由雷 射系統提供點雲資料,使林木之各項性態值,可 藉由可視化之三維坐標之雷射影像加以測計 (Omasa et al., 2002、Stovall et al., 2017、Liang et al., 2018)。
Kankare et al. (2013) 利用地面雷射掃瞄研究 量測樹高與生物量,在樹高方面,表示地面雷射 掃瞄量測之樹高與現場實測之樹高具高度相關 性,其 R2值為 0.95,由此可知此技術於樹高研究 上可取代傳統破壞性量測,以非破壞性方式取得
準確樹高參數,可有效降低人為估測樹高之誤差。
Hosoi & Omasa (2006) 利用地面雷射掃瞄技 術進行殼斗科單株立木落葉前後之影像,進行落 葉量與葉面積指數探討,顯示可提供 8 mm 解析 度影像,可準確測計林木之落葉量及葉面積指數,
以監測樹冠結構變化。Cifuentes et al. (2014) 同 樣利用地面雷射掃瞄技術進行冠層測計研究,結 果顯示,點雲資料經過雜點之過濾,可建立樹冠 3D 模型。由上述研究可知,地面雷射掃瞄可獲取 大量冠層之點雲資料,可準確的進行樹冠之量化 測計,藉由重複量測可模擬樹冠層隨時間變化之 變異量,並可藉由推估模式,估測葉面積指數及 葉部生物量 (Hosoi et al., 2013)。
Saarinen et al. (2017) 利用點雲資料,探討單 株立木之樹幹體積測計之可行性,研究結果指出,
立木以不同角度進行多站掃瞄,其點雲資料較單 站掃瞄所得的點雲資料,會有較佳的測計準確度,
其主要原因在於多站掃瞄,可獲取立木不同角度 之點雲資料,可減少林木的自我遮蔽效應,提高 立木胸徑測計的準確性;Pueschel et al. (2013) 研 究也同樣指出多站掃瞄比單站掃瞄所得之胸徑 較佳,所得出之樹幹橫截面更為穩定且趨近於真 實樹幹形狀。
由上述之研究可知,地面雷射掃瞄技術於單 木層級內,可有效獲取高精確度之樹高、胸徑及 樹冠等林木常見性態值,又由於其可視化及可重
複檢測之優點,可有效降低人為量測時所產生之 誤差,並以三維建模之方式建立資料庫。透過上 述前人研究可知,目前在林間掃瞄需找到最合適 的掃瞄方式,並透過自動化分析減少人為之間的 誤差,並藉由點雲保留現場資料,未來多時期比 對若有問題,方可透過點雲資料確認原因。
3. 研究材料與方法
3.1 研究區域概況
本研究以屏東縣萬巒鄉臺糖造林地為研究 區域。
3.1.1 地理位置及氣候環境
屏東縣臺糖造林地位於屏東縣萬巒鄉,為政 府愛臺 12 建設─綠色造林計畫時期進行造林,
於 2008 年始進行造林,造林樹種主要為大葉桃 花心木(Swietenia macropnylla King)、臺灣欒樹 (Koelreuteria formosana Hayata) 及 苦 楝 (Melia azedarach Linn.)等生長迅速之樹種。本研究之研 究區域與生態氣候圖,如圖 1 所示。
其土壤以沖積土及黏土構成,坡度小於 5 度。
由中央氣象局設置臨近研究區域之來義氣象站 所提供之氣候資料分析,年平均溫度為 24.5℃,
年降雨量 2,563 mm 以上,降雨集中夏季 6-9 月,
10 月至翌年 4 月降雨量少,故本研究區域乾濕季 分明,其生態氣侯圖 (圖 1)。
(A) 研究區域 (B) 林後四林平地園區生態氣候圖
圖 1 研究區位置與生態氣候圖
氣象資料來源:中央氣象局 (https://www.cwb.gov.tw/V8/C/) 來義氣象站
3.1.2 研究樹種
本研究以大葉桃花心木為主,大葉桃花心木 為楝科 (Meliaceae) 桃花心木屬 (Swietenia),主 要產於墨西哥、中南美洲及哥倫比亞等地,因生 長迅速、樹幹通直之特性,於中南部低海拔地區 成為主要造林樹種 (劉宣誠等,1981、馮豐隆等,
2010),本研究為探討地面雷射掃瞄技術於立木及 林分層級之測計應用,以臺糖造林地之大葉桃花 心木造林地進行試驗,其栽種株距為縱向栽植株 距 2 m、橫向栽植株距為 3 m。
3.2 研究設備與材料
3.2.1 林分地面樣區之實測值調查
樣區實測值之取得係藉由胸徑尺、皮尺及測 高桿等,進行每木調查,以取得胸徑及樹高等林 木性態值之實測值,並於樣區進行地面光達影像 掃瞄,掃瞄時須注意天氣變化,不可於起霧狀態 下進行掃瞄避免影響資料品質。
3.2.2 地面雷射掃瞄儀
本研究使用型號為 Focus3D X 330 (FARO Technologies, 美國) 之地面雷射掃瞄儀進行樣 區掃瞄。Focus3D X 330 地面雷射掃瞄儀,係以地 面架設方式進行樣區掃瞄,屬於中遠距離三維掃 瞄系統,掃瞄距離最遠可達 330 m,水平掃瞄範 圍可達 360°、垂直掃瞄範圍可達 300°,以取得立 木之 X、Y、Z 三維坐標,並藉由套疊照片進行點 雲染色以取得真實之 R、G、B 色彩樣貌,利於內 業之樹種判斷及點雲處理。
3.3 地面樣區實測資料之測計
3.3.1 樣區設置
本研究於臺糖平地造林區選定 8 個大葉桃花 心木人工林樣區,以 20 m × 25 m 之 0.05 ha 樣 區為基準,樣區內樣本數至少 30 株以上,利用 紅繩進行邊界標定。
3.3.2 樣木測計
實測值測計採用永久樣區調查法,將樣區分 為兩象限,以 S 型走法進行每木調查,測計單株
立木胸徑、樹高及其立木位置圖等林木性態值資 訊。胸徑利用胸徑尺進行量測,其測計方式係參 照美國農業部林務署之標準,以地面垂直向上約 樹幹 1.3 m 處為標準進行量測,並記錄至小數點 第 一 位 , 若 有 附 生 植 物 應 去 除 後 再 行 量 測 (United States Department of Agriculture Forest Service, 2007),樹高採用測高桿進行每木測量,
即為樹頂至地表高度,並透過敘述性統計進行性 態值分析。
3.4 以地面雷射掃瞄系統進行 地面樣區調查
3.4.1 地面雷射掃瞄系統之 掃瞄參 數設置
本研究於樣區掃瞄設置時,參考 Pueschel (2013) 同型號地面雷射掃瞄系統之掃瞄參數對 林木測計影響研究,其認為掃瞄解析度會影響樹 幹之測計範圍,並在研究中以 1/4 (43.70 MPts) 掃 瞄解析度所得之樹幹點雲資料較佳;另外本研究 亦參考 Liang et al. (2018)發表之地面雷射掃瞄技 術在森林調查之國際基準研究,其將掃瞄站數設 置為五站,此站數為多掃瞄方法中的典範設置。
地面雷射掃瞄系統於掃瞄時,最常見之參數 設定為解析度及掃瞄品質,其中掃瞄解析度意指 單位面積掃瞄之點雲數量,解析度之高低與單位 面積掃瞄點雲數量有正相關;而品質意指掃瞄時 雷射光束之強度,及光束可到達之距離,當品質 越高,可掃瞄距離越遠。故本研究將樣區掃瞄參 數設定為 1/4 (43.70 MPts) 解析度、品質 4 並將 掃瞄站點設置為五站進行多站掃瞄。
3.4.2 地面雷射掃瞄系統之掃瞄解 析度設置
本研究採用 1/2 (174.80 MPts)、1/4 (43.70 MPts) 及 1/8 (10.90 MPts) 三種解析度,並固定 品質為第四級之掃瞄參數進行掃瞄。當掃瞄解析 度為 1/2 (174.80 MPts) 時其單站掃瞄時間最長、
單位面積掃瞄之點雲數量最多;而當掃瞄解析度
為 1/8 (10.90 MPts) 時其掃瞄時間及單位面積掃 瞄之點雲數量最少。
3.4.3 地面雷射掃瞄系統 之架站設 置
本研究於樣區內架設 1 站至 5 站地面雷測掃 瞄系統掃瞄站點,其架站位置為樣區內四角及樣 區中心點,藉以取得不同面向之點雲資料,其不 同架站數之掃瞄規格及架站方式如圖 2 所示。
3.5 地面雷射掃瞄系統點雲資 料之處理
3.5.1 點雲前處理
將掃瞄點雲進行多站、多視角拼接,藉由自 動化偵測或人工判釋共軛球,以共軛球作為點雲 拼接基準,將各站之點雲資料接合,並以內建相 機照片,利用相對位置套疊,進行可視化處理,
後續再透過人工方式配合現場資料進行點雲資 料前處理,剔除不正確點資料,由於地面雷射掃 瞄系統所拍攝之影像為二維資料,故需藉由共線 式 (式(1)、式(2)) 將其轉換成三維坐標 (趙鍵哲 及彭念豪,2005),即將點雲坐標 (X, Y ,Z) 作為 方位參數,將其對應於照片上,以達成點雲可視 化之目的。
= + × = + z × ... (1)
X = p + z × a Y = q + z × b
Z = z
... (2)
其中,X0、Y0、Z0與 XL、YL、ZL為空間直 線上兩點,dX、dY、dZ 為方向向量,a、b、p、
q 為三維直線參數,t、z 為三維直線變數。
3.5.2 人工方式進行林木性態值測 計
將樣區內立木以人工判釋方式,將其獨立成 單株立木,進行林木性態值測計,如樹高及胸徑。
其測量原理,由已知三維空間坐標與該點至地面 點之距離與角度,計算距離如式(3),再以架站的 已知點 (X1, Y1, Z1) 配合式(3),求出未知點坐標 (X2,Y2, Z2) (Boehler & Marbs, 2002)。
D = (X − X ) + (Y − Y ) + (Z − Z ) ... (3)
其中,D 為距離;X1、Y1、Z1與 X2、Y2、Z2
為空間直線上兩點
3.5.3 以自動與半自動方式進行林 木性態值測計
將樣區點雲資料匯入 Lidar360 (GreenValley International) 自動化軟體內,進行林木性態值之 自動化測計。在胸徑測計上,由於樹幹周長多以 圓之形式呈現,故在直徑上多採用空間聚集之圓 擬合法,進行直徑擬合測計,於離地面 1.2 至 1.4 m 間切取樹幹橫切面之點雲資料,利用最佳圓擬 合法 (Optimal Circle, OC) 進行胸徑測計,即利 用最小二乘法計算近似樹幹圓之位置及直徑;在 樹高測計方面,先將樹木依圓擬合法進行立木分 株,再以地面為基準點向上垂直偵測其最高點之 點雲,即為該樹木之樹高,林木性態值之自動化 測計。
(A) 單站掃瞄 (B) 雙站掃瞄 (C) 三站掃瞄 (D) 四站掃瞄 (E) 五站掃瞄 圖 2 地面雷射掃瞄系統之架站配置示意圖
半自動化偵測法是以自動偵測為基礎,再加 人工判釋及量測,當自動化偵測之胸徑、樹高或 立木位置有誤時,利用人工判釋,挑選出偵測錯 誤之立木,在胸徑測計部分,以人工選定胸徑圓 盤點雲,並重新進行測計,以得正確之胸徑資料;
在樹高測計部分,以人工判釋樹體及樹冠,並以 人為方式進行樹高量測,以得正確之樹高資料。
而本研究透過四種方式,進行後續林木性態 值分析,人工判釋測計法是利用人為方式對地面 雷射掃瞄系統之點雲資料,進行樹高及胸徑量測;
自動化偵測法為利用 Lidar360 軟體,進行全自動 測計樹高及胸徑;去除界外值之自動化偵測法為 將不合理的點雲資料值剔除後,所測計之樹高及 胸徑;半自動化偵測法係將自動化處理後結合人 工判釋測計法,進行樹高及胸徑之測計。
3.6 以地面雷射掃瞄系統進行 林木性態值測計之準確性 分析
地面雷達掃描系統之點雲資料,以人工判釋 測計方式、自動化測計及半自動化測計方式,進 行林木性態值測計,並利用地面樣區之樣木實測 值,進行準確度評估,以迴歸分析及單因子變異 數分析,探討林木性態值之實測值與地面雷射掃 瞄系統點雲資料所測計之林木性態值相關性,及 點雲資料之三種不同林木性態值之測計方式的 差異性。測計結果之準確度係以均方根誤差(Root Mean Square Error, RMSE)進行評估,如式(4)。
RMSE = ∑ (y − y ) ... (4)
其中,n 為樣本數;yi為第 i 個觀測值;y 為 第 i 個實測值
3.7 不同掃瞄解析度對林木性 態值測計之影響
自 8 個樣區內隨機選取 3 個樣區進行不同解 析度之重複試驗,比較解析度 1/2 (174.80 MPts)、
1/4 (43.70 MPts) 及 1/8 (10.90 MPts) 所得出的樣 區點雲數量為何,並利用一般線性迴歸分析法及 單因子變異數分析比較三種解析度試驗所測計 之胸徑及樹高與實測值之差異性。
3.8 比較不同掃瞄站數對林木 性態值測計之影響
自 8 個樣區內隨機選取 3 個樣區進行不同掃 瞄架站數之重複試驗,因考慮到遮蔽現象及點雲 均勻度之影響,故其不同架站數之站數選擇方式。
比較其所產生之樣區總點雲密度為何,觀測 不同架站數生成點雲影像是否完整,並以自動化 測計方式取得胸徑及樹高,利用敘述性統計觀測 此不同掃瞄架站模式資料之平均值及標準差,並 分析結果探討此五種試驗與實測資料的差異性,
並比較不同架站數對胸徑及樹高測計之影響。
4. 結果與討論
4.1 調查樣區之實測值分析
本研究選定 8 個大葉桃花心木人工林樣區總 計調查 366 株立木,各樣區之林分性態值資料 (表 1)。
表 1 研究樣區林分性態值之統計
樣區編號 株數 (n) 樣區大小 (ha) 平均胸徑 (cm) 平均樹高 (m)
1 64 0.05 18.57±8.13 11.25±3.15
2 44 0.05 15.68±8.46 10.05±3.62
3 53 0.05 16.13±10.07 10.78±3.26
4 39 0.05 15.11±7.63 9.19±2.34
5 35 0.05 15.89±9.94 10.15±3.06
6 50 0.05 15.30±10.11 7.86±2.83
7 32 0.05 16.90±9.23 8.76±2.64
8 49 0.05 17.48±9.53 9.50±2.78
註:總樣本數為 366 株與平均值± 標準差
本研究所選取之樣區胸徑由 0 至 10 cm 共計 143 株占 39.07%;10 至 20 cm 共計 66 株占 18.03%;
20 至 30 cm 共計 136 株占 37.16%;30 cm 以上共 計 21 株占 5.74%,本研究選取之樣木以胸徑 10 cm 以下為最多,胸徑大於 30 cm 者最少,林分 特徵資料之平均胸徑為 17.09±8.87 cm,平均樹高 為 10.92±3.33 m。
4.2 不同點雲資料處理方法對 林木性態值測計之準確度
4.2.1 四種點雲處理方式與實測林 木性態值之變異數分析
本研究利用四種點雲處理方式進行點雲資 料測計,分別為人工判釋測計法、自動化偵測法、
去除界外值之自動化偵測法以及半自動化偵測 法。由於去除界外值之自動化偵測法為將不合理 的點雲資料值剔除後,所測計之樹高及胸徑,不 合理的點雲資料以胸徑而言,為因鄰近點雲之影 響而導致胸徑高估者,以樹高而言,為被壓木因 上方其他樹木樹冠之影響導致其樹高高估者,故 將上述值剔除後,樣本數為 317 株。本研究將上 述四種點雲處理所得之結果,以表 2 進行比較,
並利用相關分析與單因子變異數分析,探討四種 點雲處理方法與實測胸徑及樹高之關係(表 3)。
由表 2 可知,以雷射掃瞄之地面樣區點雲資 料,以人工判釋測計法、去除界外值之自動化偵 測法及半自動化偵測法,進行胸徑測計與實測資 料具有高相關性,其 r 值均大於 0.9,而自動化偵 測法則具有低相關性(r= 0.21),由單因子變異數 分析(表 3)結果可知,胸徑測計值在人工判釋測 計法、去除界外值之自動化偵測法及半自動化偵 測法與實測值間無顯著差異,而自動化偵測法之 測計值與實測值及其他三種測計方法具顯著性 差異,且其胸徑測計具有最大的誤差值,造成此 誤差之主要原因為自動化偵測法對於胸高位置 樹幹橫切面之點雲資料容易受到鄰近非目標木 之點雲資料影響,進而造成胸徑測計的誤判。
另外由均方根誤差分析結果可知,不同點雲
處理方法中以人工判釋測計胸徑之均方根誤差 最小,為 0.53 cm,此結果與 Pueschel (2013) 及 Pueschel et al. (2013 )之研究結果相符,前者利用 解析度 1/4 (43.70 MPts) 之點雲資料之胸徑測計 值與實測值相比較,其 RMSE 在 0.6 至 0.8 cm 之 間,而後者利用多站掃瞄方式測計胸徑,其 RMSE 介於 0.6 至 1.21 cm 之間,顯示與實測值無顯著 性差異;另外魏浚紘(2014) 以重複掃瞄之點雲資 料進行胸徑測計,其 RMSE 低於 1.6 cm,而本研 究之人工判釋測計及半自動化偵測法得之胸徑 RMSE 均小於 1.6 cm,其中人工判釋測計胸徑之 RMSE 僅為 0.53 cm,由此可知利用地面雷射點 雲資料,進行胸徑測計具有其可行性及高準確度。
樹高測計部分,由表 2 可知,人工判釋測計 法及半自動化偵測法與實測樹高有較高相關性,
r 值均大於 0.95,而自動化偵測法及去除界外值 之自動化偵測法與實測值相關性較低,r 值小於 0.8,且由均方根誤差及單因子變異數分析結果可 知,實測樹高值與點雲資料之人工判釋測計法所 測計之樹高 (RMSE 為 1.13 m) 與半自動化測計 之樹高 (RMSE 為 1.23 m) 無顯著性差異,而自 動化測計法 (RMSE 為 3.00 m) 與去除界外值之 自動化偵測法 (RMSE 為 2.74 m) 無顯著差異,
但與實測值具顯著性差異,此結果與 Fleck et al.
(2011) 及 Huang et al. (2011) 利用多站掃瞄測計 之立木樹高,其 RMSE 分為 2.4 及 0.8 m,而本 研究之人工判釋測計法及半自動化偵測法測計 樹高之 RMSE 介於 0.8-2.4 m 間,由此可知點雲 資料人工判釋測計法及半自動化偵測法,進行樹 高具有其可行性及準確度。本研究為討論地面雷 射高估樹高之原因,以樹高實測值與四種不同點 雲處理方法之樹高測計值,進行相減後之誤差絕 對值進行比較其結果,如表 4。
由表 4 可知,點雲資料之人工判釋測計法其 樹高誤差值在 1.2 m 以下比例為 76.50%,而誤差 在 2 m 以上的占 6.01%;自動化偵測法之樹高測 計其誤差值在 1.2 m 以下比例為 43.72%,而誤差 在 2 m 以上的占 36.61%;去除界外值之自動化 偵測法其樹高誤差值在 1.2 m 以下比例為 45.43%,
而誤差在 2 m 以上的占 35.02%;半自動化偵測 法之樹高測計誤差值在 1.2 m 以下比例為 70.22%,
而誤差在 2 m 以上的占 11.20%。
點雲資料測計樹高時產生誤差大於 2 m 以上 之原因,可分為邊界木、被壓木、樹冠遮蔽及分
叉木等。邊界木指位於樣區邊界之樹木;被壓木 指非優勢樹,多為下層木;樹冠遮蔽指上層優勢 木樹冠被下層林木樹冠所遮擋,導致樹冠遮蔽發 生;分叉木指樹幹於 1.3 m 處以下分叉為二或多 個主幹者。
表 2 不同點雲處理方法之迴歸分析與誤差總表
林木性態值 點雲處理方法 有效樣本數(n) 平均值±標準差 相關係數(r) 均方根誤差 (RMSE)
胸徑(cm)
人工判釋測計法 366 16.43±9.09 0.99 0.53 自動化偵測法 366 36.82±68.73 0.21 70.29 去除界外值之自動化偵測法 317 16.33±8.84 0.96 2.57
半自動化偵測法 366 15.96±8.84 0.99 1.19
樹高(m)
人工判釋測計法 366 10.39±3.19 0.95 1.13 自動化偵測法 366 11.85±3.04 0.75 3.00 去除界外值之自動化偵測法 317 11.74±3.16 0.80 2.74 半自動化偵測法 366 10.53±3.26 0.95 1.23
表 3 點雲資料以不同處理方法測計胸徑及樹高之差異顯著性測驗
胸徑 實測值 人工判釋測計法 自動化偵測法 去除界外值之自動
化偵測法 半自動化偵測法
最小值(cm) 3.80 3.73 3.20 3.20 3.20
最大值(cm) 38.40 38.61 502.50 39.60 38.60 平均值(cm) 16.51±9.16a 16.43±9.09a 36.82±68.73b 16.33±8.84a 15.96±8.84a
樹高 實測值 人工判釋測計法 自動化偵測法 去除界外值之自動
化偵測法 半自動化偵測法
最小值(m) 3.20 4.13 4.15 4.15 4.15
最大值(m) 17.00 16.53 17.93 17.93 16.58
平均值(m) 9.80±3.17a 10.93±3.19ab 11.85±3.04c 11.74±3.16c 10.53±3.26b 註:英文字母不同者表示其間具有 p<0.05 之顯著差異,平均值±標準差。
表 4 樹高實測與不同點雲處理方法樹高測計值之誤差率
點雲資料處理方法 人工判釋測計法 自動化偵測法 去除界外值之自動化偵測法 半自動化偵測法
誤差值 株數 % 株數 % 株數 % 株數 %
0.0~0.4 m 94 25.68 43 11.75 38 11.99 78 21.31 0.41~0.8 m 97 26.50 58 15.85 54 17.03 100 27.32 0.81~1.2 m 89 24.32 59 16.12 52 16.40 79 21.58 1.21~1.6 m 44 12.02 38 10.38 33 10.41 43 11.75 1.61~2 m 20 5.46 34 9.29 29 9.15 25 6.83
>2.01 m 22 6.01 134 36.61 111 35.02 41 11.20 總數 366 100.0 366 100.0 317 100.0 366 100.0
表 5 以點雲資料進行樹高量測之誤差來源
點雲處理方式 人工判釋測計法 自動化偵測法 去除界外值之自動化偵測法 半自動化偵測法
導致誤差因素 株數 % 株數 % 株數 % 株數 %
邊界木 8 2.19 59 16.12 65 20.50 17 4.64 被壓木 6 1.64 51 13.93 50 15.77 7 1.91 樹冠遮蔽 7 1.91 24 6.56 27 8.52 14 3.82
分叉木 0 0.00 6 1.64 6 1.89 2 0.55
樹高誤差<2 m 345 94.26 226 61.75 169 53.31 326 89.07 合計 366 100.0 366 100.0 317 100.0 366 100.0
由表 5 可知邊界木造成樹高量測誤差所占比 例最多,四種點雲處理方法皆以邊界木誤差總株 數最多,分別占總體之 2.19%、16.12%、20.50%
及 4.64%,推測造成此誤差主要原因為儀器架站 位置於樣區內,樣區邊界樹木較難取得完整樹冠 點雲,導致樹高誤判而產生誤差;被壓木造成樹 高量測誤差在四種點雲處理方法中,分別占總體 之 1.64%、13.93%、15.77%及 1.91%,其中以自 動化偵測法及去除界外值之自動化偵測法所占 比例較高,推測原因為自動化偵測樹高之原理主 要是以地面為基準垂直向上偵測其最高點作為 樹高,易將被壓木樹冠與其上層優勢木之樹冠點 雲誤判,導致被壓木樹高產生高估現象;樹冠遮 蔽造成之樹高量測誤差在四種點雲處理方法下,
分別占總體之 1.91%、6.56%、8.52%及 3.82%,
推測低估原因為樹冠相互之間遮蔽致使雷射掃 瞄光束無法穿透冠層獲取完整之樹冠點雲資料,
而造成樹高低估;而分叉木造成之樹高量測誤差 在四種點雲處理方法下分別占總體之 0.00%、
1.64%、1.89%及 0.55%,在人工判釋測計法為 0 株之原因為人工測計均是由人為主動判斷,故在 樹高量測上並未受到分叉木樹冠影響,而在其他 三種點雲處理法則容易因分叉樹冠相距太近而 導致樹高誤判之狀況。
一般而言點以雷射點雲資料進行樹高測計 時,其產生誤差之主要原因為地面雷射掃瞄系統
在掃瞄時,因樹冠間互相遮蔽,故較難取得完整 之樹頂點雲,此結果與 Liang et al. (2016)、Cabo et al. (2018) 及 Wang et al.(2019) 研究結果相符,
其研究均發現地面雷射掃瞄系統之點雲於樹高 測計方面易產生高估情形,由於樹冠密集且相互 遮蔽,而產生樹高高估或是因樹梢點雲誤判導致 低估狀況發生,其中 Wang et al. (2019) 之研究更 表明樹高較低的樹木較易掃到完整點雲,故其樹 高量測與實測值無顯著性差異,但若樹高超過 15 m 以上則易出現誤差,且 Liang et al. (2016) 之研 究中亦認為當樹高較高且樹冠較展開之立木,若 與掃瞄儀器相距較近則難以取得完整樹梢點雲。
為了更瞭解不同點雲處理方法對立木胸徑 及樹高測計之影響,本研究針對四種點雲處理方 法進行探討。
4.2.2 雷射掃瞄之點雲資料以人工 判釋測計法進行林分性態值 測計與實測值之準確度評估
以樣區點雲資料進行人工判釋測計法所測 得之林分平均胸徑為 16.43±9.09 cm,平均樹高為 10.39±3.19 m。本研究為探討樣區點雲資料以人 工判釋測計法進行樣區胸徑、樹高與實測值之適 合度,以迴歸進行分析,並利用均方根誤差分析,
探討點雲資料對於林分胸徑與樹高測計之準確 性(圖 3)。
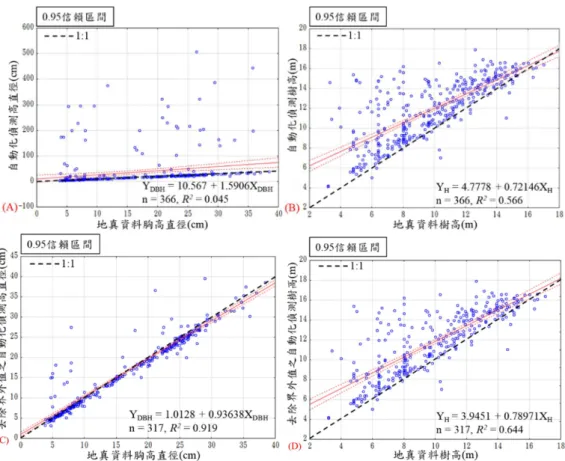
圖 3 樣區點雲資料以人工判釋測計法之測計值與實測值之迴歸分析 (A)胸徑、(B)樹高
由圖 3A 可知,利用點雲資料以人工判釋測 計法進行林分胸徑測計值與實測值之迴歸分析,
其判別係數 R2為 0.997 (p<0.05),RMSE = 0.53 cm,顯示利用點雲資料以人工判釋測計法進行林 分胸徑測計,具有高度準確性。
而在樹高測計方面,利用點雲資料以人工判 釋測計法進行林分樹高測計值與實測值之迴歸 分析(圖 3B),其判別係數 R2值為 0.911 (p<0.05),
RMSE = 1.13 m,顯示利用點雲資料以人工判釋 測計法進行林分樹高測計,具有高度準確性。本 研究結果與魏浚紘(2014)研究大葉桃花心木之胸 徑及樹高之結果相符,其胸徑 R2值為 0.96、RMSE 為 0.60 cm,樹高之 R2值為 0.69、RMSE 為 1.06 m,由此可證明,利用地面雷射掃瞄系統進行人 工測計林分之胸徑及樹高具有高度準確性。
4.2.3 雷射掃瞄之點雲資料以自動 化測計法進行林分性態值測 計之準確度評估
本研究為簡化點雲資料於林分性態值測計 之內業操作,並減少人為量測所產生之誤差,以 Lidar360 自動化點雲分析軟體進行林分性態值之 測計 (圖 4A 與 B)。
利用自動化測計法測得之胸徑與實測值進 行迴歸分析 (圖 4A 與 B),其判別係數 R2為 0.05 (p>0.05),顯示自動化測計所測得之胸徑與實測 值明顯偏離 1:1 直線,RMSE 為 70.29 cm,顯示 利用自動化測計胸徑與實測值具有顯著差異性,
而造成此差異的原因主要是由於自動化測計時,
當立木距離太近時,軟體無法辨別目標木與鄰近 木,會將兩株立木之點雲歸類為同一株立木,造 成量測誤差,而當立木具有分岔時或接近 1.3 m 處具有低矮立木之枝葉點雲亦會被歸類成目標 樹之點雲,產生高估單木胸徑之情形,而樹高部 分亦有相同現象 (判別係數 R2為 0.57,RMSE 為 3.00 m),而樹高之影響,主要原因在於自動化偵 測軟體之樹高測計原理係藉由點雲產製數值高 程模型 (Digital Elevation Model, DEM),以地面
為基準垂直向上偵測點雲的最高點視為樹高,故 導致被壓木之樹高及鄰近木之樹高易產生混淆,
導致高估現象,故依此結果發現若單以自動化偵 測法進行測計時,無法取得準確的量測胸徑與樹 高,此結果與 Liang et al. (2016) 之研究結果相符,
其認為點雲在自動化處理上具有其困難性,特別 是樹種判釋及樹高量測方面,仍然缺乏自動且準 確之量測方法。
為瞭解自動化測計法對於非目標木之週遭 點雲及具有分岔之立木如何影響林木性態值之 量測,本研究利用軟體之門檻值設定功能,將量 測之界外值去除後,再進行上述自動化偵測,結 果顯示,樣區之樣木數由實測之 366 株減少為 317 株,樣區平均胸徑為 16.33±8.84 cm,平均樹 高為 11.74±3.16 m。
透過已除界外值後之樣木以自動化測計法 所測得胸徑與實測值,進行分析,其判別係數為 0.919 (p<0.05),由此結果可知,去除界外值可以 將因立木分岔或量測位置具有樹葉之點雲雜點 加以去除,並提高點雲資料在胸徑測計準確度;
而去除界外值後自動化測計所測得之樹高與實 測樹高之判別係數(R2) 為 0.64 (p<0.05),RMSE 為 2.74 m,但由圖 4C 與 D 可知以點雲測計樹高 有明顯偏高之現象。
4.2.4 雷射掃瞄之點雲資料以半自 動化法進行林分性態值量測 之準確度評估
因自動化偵測胸徑及樹高易受到分岔樹木 及樹葉雜點等鄰近目標物點雲之影響,故為避免 因雜點或誤判而導致之高估或低估情況產生,本 研究利用人工判釋將非目標木之點雲雜訊去除 後再進行自動化之點雲資料量測,並評估量測結 果之準確度(圖 5)。由圖 5 可知,點雲資料以半自 動化測計法所得之樣區平均胸徑為 15.96±8.84 cm,平均樹高為 10.53±3.26 m。
圖 4 樣區點雲資料以自動化偵測法之測計值與實測值之迴歸分析 (A)胸徑、(B)樹高;雷射掃瞄之點雲資 料已去除界外值之自動化偵測法進行樣區林分樣木性態值測計值與實測值之迴歸(C)胸徑、(D)樹高
圖 5 點雲資料以半自動化偵測法量測之林木性態值與實測值之迴歸 (A)胸徑、(B)樹高
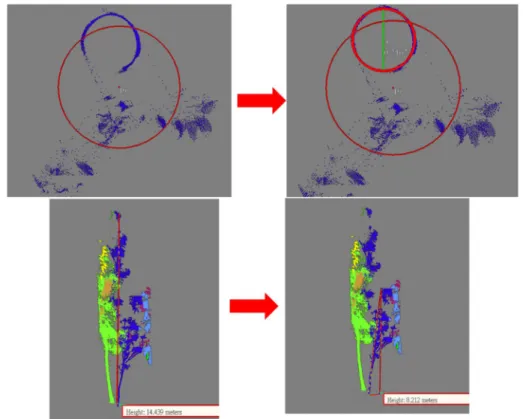
點雲資料利用半自動化測計法測得之胸徑 與實測值,可知以點雲資料量測胸徑其判別係數 R2為 0.987 (p<0.05),RMSE 為 1.19 cm ,顯示半 自動化測計點雲資料所測得之胸徑與實測值無 顯著差異,且具有高準確性的量測效能,並避免 了分岔樹木及樹葉之點雲雜點對胸徑量測之影 響,由圖 6 可知,利用人工判釋發現胸徑測計錯 誤後,再針對單株胸徑進行量測,即可有效取得 準確的胸徑資料。而點雲資料之半自動化測計法
測得之樹高與實測值,其判別係數 R2為 0.89 ( p<0.05),RMSE 為 1.23 m,顯示點雲資料以半 自動化測計法所得之樹高與實測值無顯著差異 性,以人工進行點雲資料辨識,可區分被壓木、
次優勢木及優勢木,並可加以分類各自進行樹高 量測,可有效減少因上方樹葉而產生之樹高之高 估情形,提升樹高量測之準確性,故可知利用半 自動化測計是可有效取得準確性高之林木性態 值。
圖 6 點雲雜訊人工去除後以自動化量測胸徑與樹高
4.3 以地面雷射掃瞄系統進行 森林樣區調查之試驗設計
由上述試驗證明當地面雷射掃瞄系統參數 設定為解析度 1/4 (43.70 MPts) 及架站數為五站 時,利用人工判釋測計法及半自動化測計法可有 效取得準確度高之立木胸徑與樹高,故以地面雷 射掃瞄系統進行樣區調查是可取代傳統調查。而 後續本研究針對不同架站數及不同掃瞄時間對 點雲資料測計之影響進行深入探討,可藉此降低 外業掃瞄之時間成本。
本研究自 8 個樣區內隨機選擇 3 個樣區進行 不同架站數及不同掃瞄解析度對林木性態值測 計之影響,故此試驗之林分特徵實測值,其平均 胸徑為 15.96±8.84 cm,平均樹高為 10.53±3.26 m。
4.3.1 比較不同掃瞄點雲密度對林 木胸徑及樹高測計之影響
本研究比較 1/2 (174.80 MPts)、1/4 (43.70 MPts) 及 1/8 (10.90 MPts) 三種解析度以半自動 化測計之方式探討其對林木胸徑及樹高測計之 影響,由於 1/2 (174.80 MPts) 解析度之點雲數量
過多,礙於硬體設備無法負荷龐大之點雲數量,
故本研究將研究樣區裁切,以利於半自動化點雲 處理及資料分析。
原先試驗樣區之立木株數為 111 株,經裁切 後相同樣區範圍內之立木株數為 36 株,故此試 驗將以樣本數 36 株進行胸徑及樹高之測計,並 與實測值進行迴歸分析、均方根誤差分析及單因 子變異數分析。
林木胸徑測計結果可知 (表 6),當掃瞄密度 為 1/8 (10.90 MPts) 時,其胸徑之 R2值為 0.59,
RMSE 為 7.46 cm;當掃瞄密度為 1/4 (43.70 MPts) 時,其胸徑之 R2值為 0.99,RMSE 為 0.94 cm;
當掃瞄密度為 1/2 (174.80 MPts) 時,其胸徑之 R2 值為 0.99,RMSE 為 0.95 cm。
表 6 比較不同掃瞄解析度測計胸徑及樹高之準 確度
有效樣本數 解析度 R2值 RMSE 胸徑(cm)
36 1/2 0.99 0.95 36 1/4 0.99 0.94 36 1/8 0.59 7.46 樹高(m)
36 1/2 0.94 1.28 36 1/4 0.94 1.28 36 1/8 0.68 2.46
(A) 胸高量測 (B) 樹高量測 圖 7 不同掃瞄解析度對胸徑量測及樹高量測之迴歸分析圖
由結果可知 (圖 7),三種掃瞄解析度在胸徑 測計上與實測值無顯著差異(p>0.05),此結果與 Pueschel (2013) 之研究相符,其解析度 1/4 (43.70 MPts) 時之 RMSE 為 1.4 cm,解析度為 1/8 (10.90 MPts) 時之 RMSE 為 1.7 cm,其認為解析度 1/8 (10.90 MPts) 或解析度 1/4 (43.70 MPts) 時,均對 胸徑估測不具顯著差異,表示當點雲數量足夠時,
足以描述林木胸徑狀態,但掃瞄解析度為 1/8 (10.90 MPts) 時,於胸徑測量上有高估現象,主 因為單位面積點雲數量較少,故其樹幹點雲較少,
導致分岔樹及目標物附近雜點被歸為同類,而造 成誤差產生,且掃瞄精度會隨掃瞄站點之距離增 加而下降,從而降低其胸徑之準確度;而當掃瞄 解析度為 1/4 (43.70 MPts) 及 1/2 (174.80 MPts) 時,其所測計之胸徑與實測值無顯著差異,而解 析度為 1/2 (174.80 MPts) 時其所測計之胸徑精度 並未上升,故由此可知掃瞄解析度為 1/4 (43.70 MPts) 時即可取得準確之立木胸徑,雖三種解析 度於統計上無顯著差異,但根據上述結果可知,
當點雲數量足夠時,可獲得較為接近地真之資料。
於樹高測計結果可知,當掃瞄密度為 1/8 (10.90 MPts) 時,其樹高之 R2值為 0.68,RMSE 為 2.46 m;當掃瞄密度為 1/4 (43.70 MPts) 時,
其樹高之 R2值為 0.97 ,RMSE 為 1.28 m;當掃 瞄密度為 1/2 (174.80 MPts) 時,其樹高之 R2值 為 0.94,RMSE 為 1.28 m。
樹高部分亦透過相同方式分析,三種掃瞄解 析度在樹高上與實測值無顯著差異 (p>0.05),但 在掃瞄解析度 1/8 (10.90 MPts) 之 RMSE 較高,
主因為其單位面積點雲數量較少,故其較難以準 確取得樹頂之點雲,容易獲取錯誤樹頂資料,從 而導致樹高估測誤差,致使樹高之準確度下降;
而 當 掃 瞄 解 析 度 為 1/4 (43.70 MPts) 及 1/2 (174.80 MPts) 時,其所測計之樹高與實測值無顯 著差異,而解析度為 1/2 (174.80 MPts) 時其所測 計之樹高精度有些微上升,故若單以樹高測計而 言,以解析度 1/2 (174.80 MPts) 為佳,但若考慮 胸徑與樹高測計之準確度,則以掃瞄解析度為 1/4 (43.70 MPts) 時所產生之點雲資料較佳。
由上述結果可知,地面雷射掃瞄系統於樣區 調查參數設置上,應以解析度 1/4 (43.70 MPts) 為 佳,其於胸徑及樹高測計上均與實測值具顯著相 關,而解析度 1/2 (174.80 MPts) 在胸徑及樹高測 計之準確度與解析度 1/4 (43.70 MPts) 無顯著差 異,但解析度 1/2 (174.80 MPts) 之點雲資料過大,
且限於硬體設備及內業處理時間過長,故建議仍 以解析度 1/4 (43.70 MPts) 為掃瞄參數。
4.3.2 比較不同架站數對林木胸徑 及樹高測計之影響
本研究將不同架站數之點雲數量進行量化,
由表 7 可知架站數越多其樣區內總點雲數越高,
且其樣區資訊越完整。
表 7 不同架站數之點雲數量比較表
站數 平均值(MEAN) 最小值(MIN) 最大值(MAX) 標準差(SD) 1 站 23,896,019 19,671,282 26,653,606 3,715,186 2 站 48,743,798 45,405,048 51,649,537 3,144,684 3 站 74,532,801 65,864,493 79,227,006 7,515,604 4 站 97,483,515 83,248,269 104,702,113 12,328,498 5 站 121,367,228 102,919,727 131,116,676 15,984,652
將不同架站數所產生之點雲資料利用半自 動化方式,進行胸徑測計,由結果可知,經由半 自動化測計胸徑圓盤點雲,在單站及雙站掃瞄時,
有效偵測之立木株數百分比分別為 90.09%及 97.30%,發現由於單站掃瞄之站點為中心站點,
而雙站掃瞄為對角站點,故觀測樣區點雲時發現 距掃瞄站較遠之樣木易受到外界遮蔽導致其胸 徑圓盤點雲不足,致使無法有效量測胸徑,Lovell et al.(2011)、Astrup et al.(2014) 及 Liu et al.(2017) 前人之研究均表明,單站掃瞄時,由於雷射光束 自單一方向進行掃瞄,故樣區立木有 40%因遮蔽 問題而導致點雲不足,無法測計有效之胸徑圓盤,
且於單株立木上僅能獲取部分樹幹資訊。而三站 以上之多站掃瞄,由於站數較多故可取得全面之 樣區點雲資料,有效偵測之樣本數與實際立木株 數相符,自此結果可知,若要取得準確之立木資 訊,掃瞄站數應以三站以上為佳,此研究結果與 Liang et al. (2018) 之研究結果相符,其在簡單林 分條件下之單掃瞄有效量測之立木約具有 92.2%
之準確性,而在多站掃瞄下有效量測之立木則有 高於 93.6%之準確性。本研究將無法偵測之立木 資訊去除後,樣本數共計 97 株,以相同立木株 數與所對應實測值進行迴歸及均方根誤差分析。
於胸徑測計之部分 (圖 8A 與 B),當掃瞄站 數僅有一站時,其 R2值為 0.11,RMSE 為 26.16 cm,顯示單站掃瞄時具有較大之誤差,因僅單站 掃瞄時,易因林木遮蔽問題導致立木胸徑圓盤多 呈現半圓或 1/3 圓,且距掃瞄站較遠的立木則無 法取得有效之圓盤點雲資料,故無法進行量測;
而當掃瞄站數增加,其 R2值逐漸提高,當掃瞄站 數增加至五站時,其 R2值為 0.99,RMSE 為 0.99 cm,顯示無顯著差異,因多站掃瞄可獲取立木不
同面向之點雲資料,可有效降低遮蔽之影響,其 胸徑圓盤多為完整之圓形,僅靠近樣區邊界之立 木少數為半圓,可取得準確之胸徑,故掃瞄站數 之多寡與胸徑萃取之準確度呈正相關,此結果與 Liang et al. (2018) 之研究結果相符,其發現單站 掃瞄亦產生遮蔽效應,故利用多站掃瞄可取得較 完整之樹幹點雲資料,並明顯提高胸徑估測之準 確度,其 RMSE 小於 2 cm。
根據上述資料可知,不論是單站掃瞄或是多 站掃瞄,多數林木資料與實測值均接近,但以單 站掃瞄之 RMSE 結果 (RMSE = 26.16 cm) 較差,
觀測點雲資料發現可能是因為單站掃瞄所獲得 之點雲圓盤雖多為 1/2 (174.80 MPts) 或 1/3 圓,
但仍可進行胸徑之量測,其所測得之胸徑之平均 仍在可接受範圍內,故顯示與實測值無顯著差異。
於樹高測計之部分,當僅為單站掃瞄時,其 R2值為 0.38,RMSE 為 2.94 m,顯示單站掃瞄測 計之樹高與實測值樹高具較大之誤差值,因單站 掃瞄時,由於遮蔽之問題,距掃瞄站越遠之立木 其點雲均不完整,故在樹高測計方面容易產生低 估,或是藉由合併其他樹之點雲而導致高估;當 掃瞄站數增加時,其 R2值亦增加,當掃瞄站數達 四站時,其 R2值增加為 0.90,RMSE 為 1.36 m,
顯示無顯著差異,表示多站掃瞄時,所能獲取之 立木點雲越完整,故在樹高測計方面較接近於實 測值,故掃瞄站數之多寡與數高萃取之準確度呈 正相關,此結果與 Liang et al. (2018) 在簡單林相 進行單站掃瞄時樹高估測之 RMSE 為 2.4 至 4.5 m 相符,發現當林相單純且以多站掃瞄時,其 RMSE 為 2.5 m,且其認為由於地面視角之限制 致使立木樹梢較難被掃瞄紀錄,如圖 8C 與 D 所 示。
(A) 胸徑測計之迴歸圖 (B) 胸徑測計之 R2變化圖
(C) 樹高測計之迴歸圖 (D) 樹高測計之 R2變化圖 圖 8 不同架站模式之胸徑測計及樹高測計之迴歸與 R2變化圖
根據上述資料可知,不論是單站掃瞄或是多 站掃瞄,四站或五站之多站掃瞄包含樣區多個面 向之點雲資料,故樹冠點雲較完整,其 RMSE 均 小於 1.5 m,在樹高測計方面接近於實測值。
由上述結果可知,當掃瞄站數由 1 站至 5 站 增加時,對於估測胸徑及樹高所產生之 R2值有上 升之現象(由 0.378 至 0.924),掃瞄四站達到 R2=0.900,故以地面雷射掃瞄系統在樣區調查上 要獲取完整且高準確性之胸徑及樹高,並減少掃 瞄時間與處理時間,需以多站掃瞄進行,且架站 設計須最低以四站為佳。
5. 結論
目前已有許多研究表示利用地面雷射掃瞄 系統可有效獲取大量的地表及立木三維空間資 訊,並可以非破壞性之方式取得單木層級及林分 層級之性態值,本研究利用地面雷射掃瞄系統所
獲取之掃瞄解析度為 10,240 × 4,267 Pt 之點雲資 料,進行拼接、染色及自動化測計,以產出具三 維坐標資訊之點雲資料。利用地面雷射掃瞄系統 測得之胸徑及樹高與實測值,進行直線迴歸分析、
均方根誤差分析及單因子變異數分析,證明當地 面雷射掃瞄系統參數設定為解析度 1/4 (43.70 MPts)、品質第四級以及架站數為五站時,利用人 工測計或半自動化測計可有效取得準確度高之 立木胸徑與樹高,其 R2值分別為 0.9 及 0.85 以 上,故以地面雷射掃瞄系統進行樣區調查是可取 代傳統調查,且在點雲資料測計上,半自動化偵 測法可有效取代人工判釋測計法,以降低點雲資 料處理時之人為誤差影響。
另外本研究亦針對地面雷射掃瞄系統不同 架站數及不同掃瞄解析度對胸徑及樹高測計準 確度之比較,研究結果表示,當單站掃瞄時,易 因林木遮蔽及立木與掃瞄站點之距離,無法取得
有效之圓盤點雲資料導致胸徑高估,而樹高測計 易因遮蔽導致樹冠點雲不完整致使其高估或低 估狀況發生;而在不同解析度設置之研究結果顯 示,地面雷射掃瞄系統於樣區調查參數設置上,
綜合總點雲數量及硬體設備與內業處理時間等 因素,應以解析度 1/4 (43.70 MPts) 進行樣區調 查為佳,其於胸徑及樹高測計上均與實測值具顯 著相關,其 R2值均為 0.9 以上;而多站掃瞄可獲 取立木不同方向之點雲資料,可有效降低遮蔽效 應之影響,故其胸徑及樹高之測計與實測值無顯 著差異,其 R2值分別為 0.9 以上。
故地面雷射掃瞄系統在樣區調查上要獲取 完整且高準確性之胸徑及樹高,需以多站掃瞄進 行,且架站設計須以四站以上且掃瞄解析度應以 1/4 (43.70 MPts) 為佳。
參考文獻
中央氣象局,2018。https://www.cwb.gov.tw/V8/C/,
引用 2018/12/01。[Central Weather Bureau, 2018. Available at:
https://www.cwb.gov.tw/V8/C/, Accessed December 01, 2018. (in Chinese)]
林建忠,1999。雷射測距技術與研究現況,光連:
光電產業與技術情報,19:30-33。[Lin, J.Z., 1999. Laser ranging technology and research status, Optolink, 19:30-33. (in Chinese)]
彭炳勳、謝依達、陳朝圳,2008。空載光達雷射 穿透率指數與柳杉林葉面積指數之關係探 討,臺灣林業科學,23(Supplement):S63-73。
[Peng, B.S., Hsieh, Y.T., and Chen, C.T., 2008.
Relationship between the airborne laser penetration index and leaf area index by LiDAR data analysis of a Sugi plantation, Taiwan Journal of Forest Science, 23(Supplement):
S63-73. (in Chinese)]
馮豐隆、張愷玲、張鈞媛,2010。大葉桃花心木 的生物、生態與利用,生物科學,52(2):15- 24。[Feng, F.L., Chang, K.L., and Chang, J.Y., 2010. Biology, ecology and usage of big-leaf
mahogany, Chinese Bioscience, 52(2): 15-24.
(in Chinese)]
楊榮啟、林文亮,2003。森林測計學,國立編譯 館,臺灣。[Li, C.S., and Lin, W.L., 2003. Forest Mensurement, National Compilation Museum, Taiwan. (in Chinese)]
管立豪,2007。光達技術在林業經營管理應用,
臺灣林業,33 (6): 25-29。[Guan, L.H., 2007.
Application of Guangda technology in forestry management, Taiwan Forestry Journal, 33(6):
25-29. (in Chinese)]
趙鍵哲、彭念豪,2005。以光達資料之控制直線 求解單張像片外方位參數之模式探討與可 行性評估,航測及遙測學刊,10(1): 89-102。
[Jaw, J.J., and Perng, N.H., 2005. LIDAR- based control lines for single photo orientation, Journal of Photogrammetry and Remote Sensing, 10(1): 89-102. (in Chinese)]
劉知妤、王兆桓,2008。以林齡-蓄積量模式估 算柳杉及檜木人工林的碳吸存量,宜蘭大學 生物資源學刊,4(1): 35-45。[Liu, C.Y., and Wang, C.H., 2008. Carbon Sequestration Estimates for cryptomeria and cypress plantations by age-based stock model, Ilan University Journal of Bioresources, 4(1): 35-45.
(in Chinese)]
劉宣誠、林銘輝、曲俊麒,1981。臺灣大葉桃花 心木造林木枝生長與木材性質之研究,臺灣 省林業試務所試驗報告第 351 號。[Liu, S.C., Lin, M.H., and Chu, C.C., 1981. Growth and wood properties of planted honduras mahogany (Swietenia macrophylla King) in Taiwan, Taiwan Forestry Research Institute Bulletin No.351.(in Chinese)]
賴志凱,2004。地面雷射掃瞄儀的精度分析與檢 定,國立成功大學測量及空間資訊學系碩士 論文。[Lai, C.K., 2004. Accuracy analysis and calibrationof ground-based laser scanners, Master Thesis, National Cheng Kung
University, Taiwan, ROC. (in Chinese)]
魏浚紘,2014。應用光達技術於人工林之經營與 監測,國立屏東科技大學生物資源研究所博 士 論 文 。 [Wei, C.H., 2014. Application of LiDAR system for monitoring and management of artificial forest, PhD Thesis, National Pingtung University of Science and Technology, Taiwan, ROC. (in Chinese)]
魏浚紘、陳朝圳,2016。光達技術應用於人工林 之經營與監測,航測及遙測學刊,20(4): 231- 250 。 [Wei, C.H., and Chen, C.T., 2016.
Application of LiDAR system for monitoring and management of artificial forest, Journal of Photogrammetry and Remote Sensing, 20(4):
231-250. (in Chinese)]
Al-Khedera, S., Al-Shawabkeh, Y., and Haala, N., 2009. Developing a documentation system for desert palaces in Jordan using 3D laser scanning and digital photogrammetry, Journal of Archaeological Science, 36(2): 537-546.
Astrup, R., Ducey, M.J., Granhus, A., Ritter, T., and von Lüpke, N., 2014. Approaches for estimating stand-level volume using terrestrial laser scanning in a single-scan mode, Canadian Journal of Forest Research, 44(6): 666-676.
Boehler, W., and Marbs, A., 2002. 3D scanning instruments, Proceedings of the CIPA WG 6 International Workshop, Corfu, Greece, pp.9- 12.
Cabo, C., Ordóñez, C., López-Sánchez, C.A., and Armesto, J., 2018. Automatic dendrometry:
Tree detection, tree height and diameter estimation using terrestrial laser scanning, International Journal of Applied Earth Observation and Geoinformation, 69: 164-174.
Cifuentes, R., Van der Zande, D., Farifteh, J., Salas, C., and Coppin, P., 2014. Effects of voxel size and sampling setup on the estimation of forest canopy gap fraction from terrestrial laser
scanning data, Agricultural and Forest Meteorology, 194(15): 230-240.
Fabbri, S., Giambastiani, B.M.S., Sistilli, F., Scarelli, F., and Gabbianelli, G., 2017.
Geomorphological analysis and classification of foredune ridges based on Terrestrial Laser Scanning (TLS) technology, Geomorphology, 295(15): 436-451.
Fleck, S., Mölder, I., Jacob, M., Gebauer, T., Jungkunst, H.F., and Leuschner, C., 2011.
Comparison of conventional eight-point crown projections with LIDAR-based virtual crown projections in a temperate old-growth forest, Annals of Forest Science, 68(7): 1173-1185.
Hosoi, F. Nakai, Y., and Omasa, K., 2013. 3-D voxel-based solid modeling of a broad-leaved tree for accurate volume estimation using portable scanning lidar, ISPRS Journal of Photogrammetry and Remote Sensing, 82: 41- 48.
Hosoi, F., and Omasa, K., 2006. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar, IEEE Transactions on Geoscience and Remote Sensing, 44(12): 3610- 3618.
Huang, H.B., Li, Z., Gong, P., Cheng, X.A., Clinton, N., Cao, C.X., Ni, W.J., and Wang, L., 2011.
Automated methods for measuring DBH and tree heights with a commercial scanning lidar, Photogrammetric Engineering and Remote Sensing, 77(3): 219-227.
Kankare, V., Holopainen, M., Vastaranta, M., Puttonen, E., Yu, X.W., Hyyppä, J., Vaaja, M., Hyyppä, H., and Alho, P., 2013. Individual tree biomass estimation using terrestrial laser scanning, ISPRS Journal of Photogrammetry and Remote Sensing, 75: 64-75.
Liang X.L., Hyyppä, J., Kaartinen, H., Lehtomäki,
M., Pyörälä, J., Pfeifer, N., Holopainen, M., Brolly, G., Pirotti, F., Hackenberg, J., Huang, H.B., Jo, H.W., Katoh, M., Liu, L.X., Mokroš, M., Morel, J., Olofsson, K., Poveda-Lopez, J., Trochta, J., Wang, D., Wang, J.H., Xi, Z.X., Yang, B.S., Zheng, G., Kankare, V., Luoma, V., Yu, X.W., Chen, L., Vastaranta, M., Saarinen, N., and Wang, Y.S., 2018. International benchmarking of terrestrial laser scanning approaches for forest inventories, ISPRS Journal of Photogrammetry and Remote Sensing, 144: 137-179.
Liang, X.L., Kankare, V., Hyyppä, J., Wang, Y.S., Kukko, A., Haggrén, H., Yu, X.W., Kaartinen, H., Jaakkola, A., Guan, F.Y., Holopainen, M., and Vastaranta, M., 2016. Terrestrial laser scanning in forest inventories, ISPRS Journal of Photogrammetry and Remote Sensing, 115:
63-77.
Liu, J.B., Liang, X.L., Hyyppä, J., Yu, X.W., Lehtomäki, M., Pyörälä, J., Zhu, L.L., Wang, Y.S., and Chen, R.Z., 2017. Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references, International Journal of Applied Earth Observation and Geoinformation, 56: 13- 23.
Lovell, J.L., Jupp, D.L.B., Newnham, G.J., and Culvenor, D.S., 2011. Measuring tree stem diameters using intensity profiles from ground- based scanning lidar from a fixed viewpoint, ISPRS Journal of Photogrammetry and Remote Sensing, 66(1): 46-55.
Moorthy, I., Miller, J.R., Berni, J.A.J., Zarco-Tejada, P., Hu, B.X., and Chen, J., 2010. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data, Agricultural and Forest Meteorology, 151(2): 204-214.
Omasa, K., Urano, Y., Oguma, H., and Fujinuma, Y., 2002. Mapping of tree position of Larix leptolepis woods and estimation of diameter at breast height (DBH) and biomass of the trees using range data measured by a portable scanning lidar, Journal of The Remote Sensing Society of Japan, 22(5): 550-557. (in Japanese) Polo, J.R.R. , Sanz, R., Llorens, J., Arnó, J., Escolà, A., Ribes-Dasi, M., Masip, J., Camp, F., Gràcia, F., Solanelles, F., Pallejà, T., Val, L., Planas, S., Gil, E., and Palacín, J., 2009. A tractor- mounted scanning LIDAR for the non- destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements, Biosystems Engineering, 102(2): 128-134.
Pueschel, P., 2013. The influence of scanner parameters on the extraction of tree metrics from FARO Photon 120 terrestrial laser scans, ISPRS Journal of Photogrammetry and Remote Sensing, 78: 58-68.
Pueschel, P., Newnham, G., Rock, G., Udelhoven, T., Werner, W., and Hill, J., 2013. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans, ISPRS Journal of Photogrammetry and Remote Sensing, 77: 44-56.
Reshetyuk, Y., 2009. Self-calibration and direct georeferencing in terrestrial laser scanning, PhD Thesis, Royal Institute of Technology, Stockholm, Sweden.
Saarinen, N., Kankare, V., Vastaranta, M., Luoma, V., Pyörälä, J., Tanhuanpää, T., Liang, X.L., Kaartinen, H., Kukko, A., Jaakkola, A., Yu, X.W., Holopainen, M., and Hyyppä, J., 2017.
Feasibility of Terrestrial laser scanning for collecting stem volume information from single
trees, ISPRS Journal of Photogrammetry and Remote Sensing, 123: 140-158.
Stovall, A.E.L., Vorster, A.G., Anderson, R.S., Evangelista, P.H., and Shugart, H.H., 2017.
Non-destructive aboveground biomass estimation of coniferous trees using terrestrial LiDAR, Remote Sensing of Environment, 200:
31-42.
Telling, J., Lyda, A., Hartzell, P., and Glennie, C., 2017. Review of Earth science research using terrestrial laser scanning, Earth-Science Reviews, 169: 35-68.
United States Department of Agriculture Forest Service, 2007. Forest Inventory and Analysis National Core Field Guide Volume I: Field Data Collection Procedures For Phase 2 Plots Version 4.0 for West Texas and West Oklahoma, Available at:
http://www.srs.fs.usda.gov/fia/data_acquisitio n/field_guide/Final/SRS_West_Ver_4_2007.p df, Accessed May 20, 2017.
Wang Y.S., Lehtomäki, M., Liang, X.L., Pyörälä, J., Kukko, A., Jaakkola, A., Liu, J.B., Feng, Z.Y., Chen, R.Z., and Hyyppä, J., 2019. Is field- measured tree height as reliable as believed – A
comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest, ISPRS Journal of Photogrammetry and Remote Sensing, 147: 132-145.
Wei, C.H., Chen, C.T., Chen, J.C., and Wu , S.T., 2014. Using Ground-based LiDAR data to measure standing trees in a red cypress plantation, Taiwan Journal of Forest Science, 29(3): 169-178.
Wei, C.H., Wu, S.T., Chen, J.C., and Chen, C.T., 2011. Application of 3D laser scanning data in structural forest management decision, The 32nd Asian Conference on Remote Sensing (ACRS2011), Taipei, Taiwan.
Xu, X.Y., Yang, H., and Neumann, I., 2017.
Deformation monitoring of typical composite structures based on terrestrial laser scanning technology, Composite Structures, 202: 77-81.
Zai, D.W., Li, J., Guo, Y.L., Cheng, M., Huang, P.D., Cao, X.F., and Wang, C., 2017. Pairwise registration of TLS point clouds using covariance descriptors and a non-cooperative game, ISPRS Journal of Photogrammetry and Remote Sensing, 134: 15-29.
1 Master, Department of Forestry, National Pingtung University of Science and Technology Received Date: Mar. 04, 2020
2 Associate Professor, Department of Forestry, National Pingtung University of Science Revised Date: Apr. 10, 2020
and Technology Accepted Date: Jun. 20, 2020
3 Emeritus Professor, Department of Forestry, National Pingtung University of Science and Technology
4 Assistant Professor, Department of Forestry, National Pingtung University of Science and Technology
* Corresponding Author, Tel: 886-8-7703202 ext.7147, E-mail: [email protected]
Terrestrial Laser Scanning Systems for Measuring Tree Based on Small Plot Data
Tzu-Chun Shiao
1Jan-Chang Chen
2Chaur-Tzuhn Chen
3Chun-Hung Wei
4*Abstract
The Terrestrial Laser Scanning (TLS) has the characteristics of non-destructive measurement, and its point cloud information acquired from TLS allows obtaining accurate forest attributes through visualization and automated extraction. The purposes of this study include using TLS to obtain point cloud information and discuss different methods to extract Diameter at breast height (DBH) and height (H) within small plot, and we also discuss the impact of point cloud generation in different resolution and station number settings. The results showed that the DBH and H measured by TLS were not significantly different from the measured values in the manual extraction and semi-automatic extraction detection methods. In addition, when the scanning resolution is 1/4(43.70 MPts) and 1/2(174.80 MPts), there is no significant difference between the measured DBH, H and the measured value, and the accuracy does not increase when the resolution is 1/2(174.80 MPts). Therefore, we can obtain the accurate DBH at the scanning resolution of 1/4(43.70 MPts); and the number of scanning stations is positively correlated with the DBH and H extraction accuracy. Therefore, the number of stations should be more than four stations.