結合光達資料與大比例尺向量圖重建三維建物模型
陳良健
1郭志奕
2摘要
數碼城市日益重要。而在數碼城市中,建物為其必要單元。光達資料(LIDAR data)的引進,為自動化 建物重建之研究方向帶來可能性。大比例尺向量圖具有精確之二維屋緣線,而光達資料具有豐富之屋頂 面資訊。故本研究欲結合以上兩種資料之優勢,進行三維建物重建。本研究工作流程主要分為三部分:(1) 資料整合、(2)建物頂共面分析、及(3)建物模塑。在資料整合部分,內容為兩資料之前處理,光達資料需 去除地表起伏,而向量圖需建構封閉多邊型。在建物頂共面分析部分,以區塊成長法進行牆面和屋頂面 之偵測。最後在建物模塑部分,內容為求取建物三維結構線段,利用 SMS 法建立結構線位相關係並模塑 建物屋頂面高度。本研究並以台中大坑進行測試。光達資料點密度約 1.71(點/平方公尺),向量圖比例尺為 1:1000,重建完全正確率約 90%,模塑誤差為 0.17m。
關鍵字:光達資料、向量圖、三維建物重建、迪式三角網
1. 前言
1.1 研究動機與目的
數碼城市(Cyber city)隨著現今資訊的發達和都 市管理影響面的擴大,而日益重要。數碼城市將現 實城市中的資訊,包括建物、交通、人口等等,數 位化地存入電腦當中。若數碼城市資料庫建構完 成,管理者便可以有具體的資料來選擇工廠地址、
校址、區域環境規劃(Danahy,1999)、虛擬實境(Volz
& Klinec, 1999)等等決策,都可先對在電腦中數碼 城市進行分析。因數碼城市即是現實城市的縮小 版,所以分析的結果可以作為一可靠的依據參考,
亦能預防不當的決策,故數碼城市建置有其重要 性。
而在數碼城市中最重要的即是建物,近十年 來,在測量精度持續提高之情勢下,執行建物萃 取、重建精確三維建物模型,也成為一個重要研究
方向(Förstner et al.,1999)。重建三維建物模型,依人 工介入之多寡,可區分成自動化及半自動化建物重 建。自動化建物重建為最終的目標,但由於建物外 圍輪廓線和建物屋頂面結構判識困難,自動化建物 重建較不能提供可靠的成果。因此有許多的研究都 投入於半自動建物重建,例如:傳統做法的多張航 空照片,利用立體製圖儀,人工產生三維坐標(Wolf
& Dewitt , 1974)。尚有利用 CSG 模型(Tseng and Wang, 2003),半自動人工模型套合,將建物模型重 建。或是(Rau & Chen, 2003)提出的 SMS 演算法,
亦是先利用人工量測建物外緣線段,再以切割-合 併建立二維位相關係,重建三維建物模型。
而光達資料的引進,為自動化建物重建之研究 方向帶來可能性。空載光達掃描儀(airborne laser scanning) , 也 所 謂 的 光 達 (Lidar) 源 於 1970 年 代 (Jennifer & Jeff , 1999),其利用飛機或直昇機裝載雷 射掃描儀,藉著發射雷射波以及精準的量測回波所 經過的時間進而得知感測器與目標物之距離。所得
1國立中央大學太空及遙測研究中心與土木工程學系教授
2國立中央大學土木工程所空間資訊組碩士生
收到日期:民國 94 年 09 月 29 日 修改日期:民國 95 年 09 月 12 日 接受日期:民國 95 年 09 月 15 日
之資訊為一群離散的三維坐標點雲(point clouds)。
現今光達結合 GPS 及 INS 技術,使能獲得精確的 掃描坐標,密集之掃瞄頻率,對於地表之描述在精 確度與解析度上均有重大之突破(Wehr & Lohr, 1999)。其相對於航照圖及向量圖有較好的高程精 度(Maas, 2002)。
光達資料可提供豐富的屋頂面資訊,而向量圖 可提供精確的建物輪廓線。藉由此特性,本研究以 資料融合(data fusion)出發,結合光達資料與大比例 尺向量圖之優勢,以全自動化為目標,重建三維建 物模型。測試將以可靠度及精度為主要考慮。
1.2 研究構想與流程
建物模型最重要的兩部分,一部分為建物頂結
構,另一部分為建物外圍輪廓線。光達資料具豐富 屋頂面資訊,而大比例尺向量圖具精確建物輪廓 線。本研究以資料融合出發,結合這兩樣資料之優 勢,重建三維建物模型。而在建物類型上,一般常 見的有平頂屋、斜頂屋、山型屋以及具階梯線(step edge)之建物。本研究針對這些建物類型,提出一套 建物重建之方法。
在本研究執行之步驟上,主要包括三部分,分 別是資料整合,建物頂共面分析,以及建物模塑。
資料整合將兩資料進行前處理,而建物屋頂面共面 分析將建物中不同屋頂面結構偵測出來。最後建物 模塑部分內容為求取建物三維結構線,利用 SMS 法(Rau & Chen,2003)建立結構線位相關係並模塑建 物屋頂面高度。流程如圖 1。
圖 1 本研究流程圖 去 除 地 表 起 伏
D T M
大比例向量圖 空載光達資料
建 構 封 閉 多 邊 形
萃 取 建 物 光 達 點 雲
建 構 迪 氏 三 角 網
以 區 塊 成 長 法 進 行 牆 面 和 屋 頂 面 偵 測
求取屋脊線段 求 取 階 梯 線 段
屋 脊 線 段 修 正 階 梯 線 段 修 正
建 立 結 構 線 二 維 位 相 關 係
塑 建 物 屋 頂 面 高 度
三 維 建 物 模 型 評 估
資 料 整 合
建 物 頂 共 面 分 析
建 物 模 塑
2. 資料整合與建物頂共面 分析
本章節之目的,將光達資料與大比例尺向量圖 進行資料整合以及建物頂共面分析。在資料整合部 分,細分為資料前處理以及資料套合。在建物頂共 面分析部分,細分為萃取建物光達點雲、建構迪氏 三角網、以及以區塊成長法進行牆面和屋頂面偵 測。
扼要描述各部分之內容,前處理部分,光達原 始點雲,修正為無地表起伏之點雲,向量圖中建物 輪廓線,建構封閉多邊形。兩資料套合部分,不同 資料來源常會有參考坐標系統不一致之情形需考 慮。故本研究以兩資料套疊,以人工判識其套合檢 視其系統誤差是否於容許範圍之內。萃取建物光達 點雲部分,如何有效地萃取建物之點雲,剔除非建 物點雲,亦是需解決之問題。在建構迪氏三角網部 分,需滿足兩特性:最大最小角,以及任一三角形 之外接圓內不包含其他點。最後牆面和屋頂面偵測 部份,以區塊成長法,偵測不同牆面以及屋頂面。
以下就資料前處理、萃取建物光達點雲、牆面與屋 頂面偵測,詳細說明其內容。
2.1 資料前處理
在光達資料前處理部份,首先數值地形模型 (digital terrain model)以地面點(ground points)網格內 插產生,表面點(vegetation points) 再逐點與數值地 形模型相減。經此步驟,可獲得一群去除地表起伏 之光達點雲。在向量圖前處理部份,由於大比例尺 向量圖內之建物外圍輪廓線段間並不具備位相關 係(Topology),且相鄰兩線段之端點並不連續。故 須先利用 SMS 演算法(Chen & Rau, 2003),重建線 段間之位相關係。
2.2 萃取建物點雲
由於受到光達資料與向量圖套合偏移以及雜 訊的影響,如果單以建物輪廓線萃取光達點雲,可 能會萃取出非建物點雲,例如位於地面之點雲或是 高程不合理之雜訊點。因此本研究亦加入其它其他 資訊提高萃取之可靠度,例如加入向量圖提供的建 物約略高資訊。而在未具建物約略高之情形下,本 研究亦提出以群聚法萃取建物點雲之方法。
2.2.1 以群聚法萃取建物點雲
在沒有建物約略高之情況下,本研究亦企圖能 萃取正確的建物點雲。以圖 2 為說明,在精確建物 輪廓線中,有屬於兩不同高程屋頂層之點雲,亦有 屬於地面的的非建物點雲。
圖 2 不同屋頂層點雲示意圖 第 一 屋 頂 層
第二屋頂層
第 二 屋 頂 層
故本研究以群聚法萃取屬於不同屋頂層之建 物點雲,萃取流程如圖 3。由於在建物輪廓線周圍 可能有非建物點雲,如地面點或是樹木點。故本研 究先內縮建物之輪廓線,萃取較可靠的建物光達點 雲計算高程平均值和標準差。將所有位於精確建物 輪廓線中之光達點雲,分成信賴區間點雲和非信賴 區間點雲。信賴區間點雲即為第一屋頂層,而非信
賴區間點雲做個點數判斷,若點數大於門檻值,代 表該建物可能有第二屋頂層。以這些點雲計算高程 平均值和標準差,再區分信賴區間點雲和非信賴區 間點雲。依照此規則,直到非信賴區間中之點雲點 數已不足夠描述一屋頂面為止。依此方法,可自動 萃取建物光達點,而位於建物輪廓線內之非建物點 雲亦能剔除。
圖 3 群聚法萃取點雲流程圖
2.3 建物頂共面分析
此部份目的為建物頂共面分析,不同的建物頂 結構,應被自動化地偵測出來。建物頂結構包含兩 種:(1)屋頂面,及(2)兩屋頂面間有高程差之牆面,
如圖 4 箭頭所示,亦即階梯線之結構。建物頂牆面 之水平投影面積,通常較屋頂面小,易被偵測成屋 頂面雜訊。故在兩種建物頂共面分析順序上,先進 行牆面偵測再進行屋頂面偵測。
為了進行建物頂共面分析,將利用分割技術 (segmentation)。區塊成長法(region growing) ( R o t t e n s t e i n e r , 2 0 0 3 ) 以 及 直 接 切 割 法 ( d i r e c t
segmentation)(Benkő et al.2001)是最被廣泛使用的分 割技術。前者開始於一個種子元素(seed element),
搜尋其周圍元素並判斷其特性是否足夠接近,若是 則將其判斷為同一類。當某區塊成長完畢,新的種 子元素會被選定,並依照同樣之規則成長,直到所 有元素被判定類別為止。而後者是計算所有元素之 幾何特性,在幾何空間中群聚且有位相關係者定義 為同類。在建位相關係中,需額外給定參數。為了 提高建物頂共面分析自動化之程度,本研究所使用 的分割技術為區塊成長法。以下詳述建物頂分析之 內容。
計算高程平均值和標準差 光達點雲
非信賴區間之點雲
點數是否足夠 構成屋頂面
結 束 信賴區間之點雲
是
否
內縮建物輪廓線
圖 4 階梯線結構示意圖
2.3.1 以區塊成長法進行牆面 偵測
在偵測牆面的三角網時,本研究給予二約制:
(1)三角網之法向量夠接近垂直或高程差夠大,及(2) 必須群聚在一起且面積足夠描述一牆面。
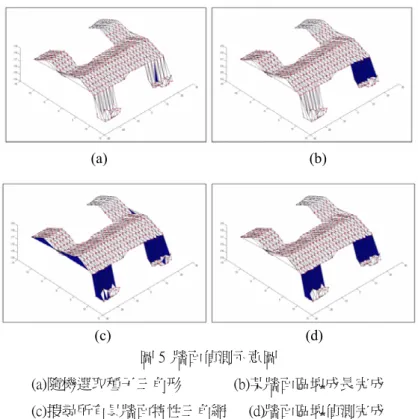
以區塊成長法進行牆面偵測詳細步驟如下,隨 機選取法向量夠接近垂直或高程差夠大之種子三 角網,如圖 5(a)。搜尋相鄰三角形,判斷其是否亦 具牆面特性。以此方法,進行牆面區塊成長,直到 相鄰三角形不具牆面特性。當牆面區塊成長停止 後,如圖 5(b),隨機選取新的牆面種子三角形,以 同樣的方法區塊成長。當所有具有牆面特性的三角 形都構成區塊後,如圖 5(c),判斷每一區塊其面積 是否足夠的可以描述牆面。若面積過小則判斷其為 雜訊,如圖 5(d)。
(a) (b)
(c) (d) 圖 5 牆面偵測示意圖
(a)隨機選取種子三角形 (b)某牆面區塊成長完成 (c)搜尋所有具牆面特性三角網 (d)牆面區塊偵測完成
2.3.2 以區塊成長法進行屋頂面 偵測
牆面偵測後,進行屋頂面偵測。亦是以區塊成 長法,隨機選取非牆面之種子三角形,如圖 6(a)。
搜尋其相鄰之三角形,判斷其法向量夾角是否足夠 接近,若是則將其三角形歸為同類,並修正種子區
塊之法向量,如圖 6(b)。以此方法,種子區塊不斷 的增長直到該區塊鄰近三角形之法向量夾角皆大 於門檻值。在未分類之三角形中,再選取新的種子 三角形,如圖 6(c)。並以同樣的方式區塊成長,當 所有三角形都分類到某區塊時,區塊成長即完成,
如圖 6(d)。
由於光達資料測量誤差以及雜訊影響,一些雜 訊和誤差點所構成的三角網會被歸類為一個區
塊,而非代表一屋頂面。故設定一個水平投影面積 的門檻值,當區塊投影面積小於門檻值時,將其視
為雜訊區塊,並將其與相鄰法向量夾角最小之區塊 合併。
(a) (b)
(c) (d) 圖 6 屋頂面偵測示意圖
(a)隨機選取種子三角形 (b)種子區塊成長 (c)選取新種子三角形 (d)區塊成長完成
由於在前步驟中,有可能有一些雜訊三角網區 塊被合併到一些較大的區塊。故在迴歸屋頂面面方 程式中,先剔除粗差點雲,再進行迴歸面方程式,
流程如圖 7。以每個屋頂面區塊中所有點雲計算一 面方程式和垂距殘差之標準差,若標準差大於門檻 值,則以二倍至三倍標準差剔除粗差。將剩餘點雲
計算標準差,判斷其標準差是否通過門檻。以此方 法重複計算,直到標準差小於門檻值,而剩餘點再 迴歸面方程式。由於光達資料高程誤差約 15 公 分,本研究給其容許誤差,故此步驟門檻值設定為 20 公分。
圖 7 迴歸面方程流程圖
區塊點雲
計算面方程式和垂距標準差
門檻 (σ=20cm)
迴歸面方程式 剔除粗差點雲
(>2~3*σ)
3. 建物模塑
在先前之步驟中,建物頂結構已偵測出來,且 具有位相關係。本研究建物模型是以多面體模型 (polyhedral model) 描述,此種建物模型是由若干個 多邊型所構成,而每個多邊型又是由三維線段所構 成。故本研究在建物頂共面分析後,欲計算建物頂 之三維線段。
此部份目的為建物模塑,分為兩部分:(1)求取 建物頂結構三維線段,及(2)建立結構線二維位相關 係並模塑屋頂面高度。在求取建物頂結構三維線段 部分,建物頂結構線段可區分為內部結構線,以及 外部結構線。內部結構線區分為屋脊線(ridge)及階 梯線,屋脊線為兩相鄰屋頂面相交而成,階梯線為 兩屋頂間有高程差而成。而外部結構線,則是建物 外圍輪廓線。以建物頂每一屋頂面為單位,求取所 屬的結構三維線段。求取的步驟為:先求取每一屋 頂面之內部結構三維線段,並修正其不合理端點。
之後引入外部結構線段,以 SMS 法建立結構線二 維位相關係,最後並模塑屋頂面高度。
以下詳述建物模塑之內容,主要分為:(1)求取 建物之結構三維線段,(2)建立結構線二維位相關係 並模塑屋頂面高度。在求取建物之結構三維線段部 分,若是山型屋則細分為:求取屋脊線段和修正,
求取階梯線段和修正。若是平頂屋,則不需求取屋
脊線段和修正。之後定介紹建立結構線二維位相關 係,及模塑屋頂面高度之內容。
3.1 求取屋脊三維線段
在此步驟,以建物的每一個屋頂面為單位,求 取屋脊線線段。所謂屋脊線,由兩相鄰屋頂面相交 而成。計算建物屋脊線之步驟如下:
1. 判斷相鄰屋頂面
2. 利用相鄰屋頂之面方程式,決定屋脊走向 3. 利用兩屋頂面共用光達點,定義屋脊線線段之
範圍
詳細過程如下,搜尋每一屋頂面之外圍三角 網,若兩屋頂面之外圍三角網有相鄰共用相同點 群,代表此兩屋頂面相鄰需計算屋脊線,由兩屋頂 面相交決定屋脊線走向。此時需要定義屋脊線之範 圍,使無限長的屋脊線定義成一條線段。定義線段 的方法以圖 8 說明 ,欲求屋頂面 A 及屋頂面 B 之 屋脊線。首先搜尋相鄰屋頂面之光達點,如圖 8 點 群所示。並產生一包絡立方體包含所有相鄰點群,
如圖矩形框線所示。
而先前所計算的屋脊線走向向量,在三維空間 中,會與此包絡立方體,相交於兩個三維坐標點。
以此兩坐標點描述屋脊線,即可將無限長之屋脊線 定義成一線段,如圖 9。
圖 8 包絡立方體示意圖
圖 9 定義屋脊線段示意圖
屋頂面 A 包絡立方體
屋頂面 B
3.2 修正屋脊三維線段
經由前步驟,可獲得初始屋脊線線段。由於測 量的誤差,屋脊線段會有以下不合理之情形,需要 給予修正,如圖 10 所示。
1. 屋脊線端點,未與建物輪廓線相交於同一點,
如圖 10(1)。
2. 屋 脊 線 端 點 未 相 交 於 建 物 輪 廓 線 的 端 點
(building corner),如圖 10(2)。
3. 屋脊線端點,和其他屋脊線端點足夠地接近,
但未相交如圖 10(3)。
4. 在共面分析時,屋頂面區塊(region)間,有時會 有不合理的相鄰情形,如圖 11。導致計算屋脊 線線段時,會有不合理之過短線段產生,如圖 10(4)。
圖 10 屋脊線段不合理示意圖圖 圖 11 屋頂面區塊不合理相鄰示意圖
故需判斷上述情形,並調整屋脊線端點。先將 不合理過短線段移除,剩餘的屋脊線線段往外延長 一段距離,判斷是否與建物輪廓線相交。若有相 交,將端點修正至相交的坐標點,又若此坐標點,
足夠接近建物輪廓線的端點,再將其銜接到此端 點。而未與建物輪廓線相交的端點,以三維空間的 球形環域(sphere buffer),檢查其與其他屋脊線端點 是否足夠接近。若有則將這些端點銜接匯集(snap) 至同一點。該點具一特性:到對應屋頂面之垂距距 離平方和為最小。
3.3 求取階梯線三維線段
在此步驟,目的為求取階梯線段。如先前所 述,階梯線為兩屋頂面間有牆面所構成。而在先前 牆面偵測步驟中,已得牆面三角網區塊,利用此區 塊求取階梯線。計算階梯三維線段,方法如下:
1. 迴歸牆面之面方程式 2. 決定階梯線之走向向量 3. 定義階梯線線段之範圍和高度
詳細計算過程如下:利用牆面三角網格區塊中
的點群,如圖 12 點雲所示,迴歸計算面方程式為 Z = aX + bY + c,如圖平面 A。因牆面為垂直平面,
故以 0 = aX + bY + c 描述此牆面,如圖平面 B。而 向量( - b , a )即可描述階梯線 X-Y 平面走向。而此 線段平面的範圍,可以由階梯線之走向,和一包含 所有牆面三角網區塊點雲的環域來定義,方法類似 於屋脊線段之求取。而階梯線段高度各由兩屋頂面 通過求得,即可獲得階梯線頂與底之結構線,如圖 13 所示。
3.4 修正階梯三維線段
經由前步驟,可獲得初始階梯三維線段。由於 測量的誤差,階梯線段會有以下不合理之情形,需 要給予修正。
1. 階梯線段端點,未與精確建物輪廓線相交於同 一點。
2. 階梯線段端點未相交於精確建物輪廓線的端 點。
3. 階梯線線段的端點,和若干屋脊線端點,足夠 地接近,但未相交於一點。
4. 階梯線線段的端點,和其他尚未調端的階梯線 線段端點,足夠地接近,但未相交於一點。
故需判斷上述情形,並調整階梯線之端點。步 驟如下:所有階梯線段往外延長一段距離,判斷是 否與精確建物輪廓線相交。若相交則將此端點修正
至該點,若此坐標點足夠接近建物輪廓線之端點,
則將此端點銜接至建物輪廓線端點。而未與建物輪 廓線相交的端點,以圓形環域 (buffer)判斷其與所 有屋脊線端點和階梯線端點,是否足夠接近,若是 則將這些端點修正至同一點。
圖 12 求取階梯線示意圖(1) 圖 13 求取階梯線示意圖(2)
(a) (b)
(c) (d)
圖 14 建立二維位相關係及模塑屋頂高度示意圖 (a)依序分割屋頂單元 (b) 分割屋頂單元完成 (c)移除不合理邊界及合併 (d) 屋頂面之高度模塑
0 = aX+bY+c 平面 A
平面 B
(- b, a)
平面 B
階梯線
3.5 建立結構線二維位相關係
先前之步驟中,已求取建物頂中之內部結構 線,包含屋脊線以及階梯線。此時引入建物外圍輪 廓線,利用 SMS 建立所有結構線之位相關係。首 先不考慮所有內部結構線之高度,將所有內部結構 線段依照長短排序,由最長之結構線開始處理。第 一條內部結構線將建物外圍輪廓線之多邊型分割 成兩個屋頂單元,如圖 14(a)。接著依序利用剩餘 之內部結構線分割房屋單元,產生許多房屋單元,
如圖 14(b)。之後判斷兩兩相鄰房屋單元是否需合 併,若兩房屋單元其共同邊界於原內部結構線中不 存在,則移除此邊界並合併此兩房屋單元。依照此 規則,即可建立結構線之二維位相關係,如圖 14(c)。之後利用於建物頂共面分析步驟中之屋頂面 之面方程式,將屋頂面之高度模塑,如圖 14(d)。
4. 測試成果與討論
本章節內容為測試成果與討論,分為四部份。
分別為(1)研究資料簡介、(2)研究流程中各門檻之
討論、(3)資料套合之成果與討論,以及(4)建物模 型模塑之成果與討論。
4.1 研究資料簡介
在研究資料部分,光達資料為農委會所提供,
為 2002 年 4 月間由 Optech 公司之 ALTM 系統所 測得。光達資料中原始離散點解析力大約為 1.712 點/m2,高程精度大約 15cm,平面精度大約 40cm,
測量時間為 2002 年 3 月。而大比例尺向量圖為中 華顧問工程司所提供,由航照測製,航照拍攝日期 為 2002 年 3 月,而向量圖測製時間為 2002 年 4 月,
比例尺為 1:1000,平面精度大約 20cm。兩資料相 關參數如表 1。
研 究 之 測 試 區 位 於 台 中 大 坑 , 面 積 約 508 (m)x600 (m),向量圖範圍如圖 15,其中含建物 115 棟。而該區域之光達資料如圖 16。雖本研究未使 用航照影像,但為充分描述實際地表情況,仍附圖 17。
表 1測試資料簡介
光達資料 Optech ALTM 向量圖 內政部
航高 1200~1500m 拍攝時間 2002 年 3 月
FOV 14 度 測製時間 2002 年 4 月
雷射波長 1.064 μm 比例尺 1:1000
掃描頻率 35 Hz 空間解析力 約 10cm
雷射脈衝率 33 KHz 平面精度 約 20cm
水平精度 約 40cm 坐標系統 TWD 97
高程精度 約 15cm
圖 15 測試區向量圖資料 圖 16 測試區光達資料 圖 17 測試區航照影像
4.2 資料整合之成果與討論
在資料整合之成果討論中,分為光達資料去除 地表起伏,和光達資料和向量圖資料套合兩部分。
4.2.1 去除地表起伏之成果
在去除地表部分,以光達資料的地面點(ground point),內插為網格化資料,解析度 1 公尺,再以 地表點(vegetation point),逐點減去地表起伏。未去
除地表起伏之光達點雲如圖 18,而去除地表後成 果如圖 19。由成果可知,屬地表之光達點雲,高 程修正為零,而建物點雲高程修正為樓層高。
4.2.2 資料套合之成果
由兩資料套疊,以人工檢視套合之情形,確定 兩資料其之間之系統誤差在容忍範圍之內,如圖 20 所示。由成果可知,光達資料與向量圖套合情 形良好。
圖 18 測試區未過濾地形之光達點雲 圖 19 測試區過濾地形之光達點雲
圖 20 測試區之套合情形
4.4 建物模型模塑之成果與討論
研 究 之 測 試 區 位 於 台 中 大 坑 , 面 積 約 508 (m)x600 (m),其中包含 115 棟建物。而在測試區中,
有棟建物加蓋情況非常嚴重,與向量圖已完全不 符,如圖 21。由於本研究不探討建物變遷問題,
故在測試中不對此建物進行重建。
(a) (b) 圖 21 本研究不探討建物圖
(a) 建物影像 (b) 建物向量圖資料
針對其他本研究探討的 114 棟建物進行測 試。在測區中之建物,區分為四類建物,即平頂屋、
簡易山型屋、複雜山型屋、以及非平面屋頂建物。
其中平頂屋為一個或多個水平屋頂之建物,而簡易 山型屋為單屋脊兩屋頂面,或是並列多個山型之建
物。複雜山型屋為多屋脊且需匯集(snap)修正之建 物,而非平面屋頂建物,為弧面屋頂之建物。在本 研究測區中,包含了 36 棟平頂屋,53 棟簡易山型 屋,19 棟複雜山型屋,以及 6 棟非平面屋頂建物。
各類典型建物如圖 22。
平頂屋:36 棟 簡易山型屋:53 棟
複雜山型屋:19 棟 非平面屋頂建物:6 棟
圖 22 典型建物圖
4.4.1 測區重建成果
在重建成果部分,正確率分為三種:正 確、部分正確、以及錯誤。正確為建物模型與
建物一致,部分正確為連棟屋模型有部分正確 有部分錯誤,而錯誤定義為建物模型完全錯 誤。而就每一類型建物其正確性整理如表 2。
而全區建物模型重建如圖 23。
圖 23 全區重建成果 表 2重建成果
重建成果 平頂屋 簡易
山型屋
複雜 山型屋
非平面
屋頂建物 正確率
正確 36 53 8 6 90%
部分正確 0 0 9 0 8%
錯誤 0 0 2 0 2%
而就每一類型建物,舉若干典型例子說明重建 成果。由於平頂屋以及簡易山型屋重建較為單純,
故舉一例說明。而複雜山型屋較為複雜,故多舉幾 例並詳細說明。而非平屋頂面建物亦舉一例說明。
在重建部分,雖未使用航空影像,但為充分描述實 際建物狀況,附航照供參考。
4.4.2 平頂屋和簡易山型屋測試
在研究測區中,某一建物群,含有 4 棟簡易山 型屋以及 1 棟平頂屋,平頂屋具階梯線,如圖 24(a) 框所示。重建成果如圖 24(b),皆重建正確。
(a) (b) 圖 24 平頂屋和簡易山型屋重建測試
(a)航空影像 (b)建物模型
4.4.3 複雜山型屋測試(1)
該建物屬於複雜山型屋,有多屋脊線匯集一點 之情形,如圖 25 (a)。在資料部分,該建物光達點 雲與向量圖建物輪廓線如圖 25 (b)和圖 25 (c)。以群
聚法萃取建物點雲成果如圖 25(d),偵測出 6 屋頂 面,如圖 25 (e)。求取結構線如圖 25 (f),結構線修 正如圖 25 (g)。結構線三維空間如圖 25 (h),及建物 模型如 25 (i)。該建物重建正確。
(a) (b) (c) (d)
(e) (f) (g) (h)
(i)
圖 25 複雜山型屋重建測試(1)
(a)航空影像 (b)建物輪廓線 (c)原始光達點雲 (d)群聚法萃取成果 (e)建物頂共面分析 (f)求取結構線 (g)修正結構線 (h)三維空間圖(i)建物模型
4.4.4 複雜山型屋測試(2)
該建物屬於複雜山型屋,並有多屋脊線端點匯 集一點之情形,建物如圖 26(a)。在資料部分,該 建物向量圖輪廓線與光達點雲如圖 26 (b)和圖 26 (c)。以群聚法萃取建物點雲成果如圖 26 (d),偵測 出八個屋頂面區塊如圖 26 (e)。相鄰屋頂面求取屋 脊線如圖 26 (f),以及結構線修正後如圖 26 (g)。建 物模型如 26 (h),該建物重建正確。
4.4.5 複雜山型屋測試(3)
該建物屬於複雜山型屋,有多個屋脊線結構以
及階梯線結構,如圖 27 (a)。輸入資料如圖 27 (b) 和 27 (c)。以群聚法剔除非建物點雲如圖 27 (d),偵 測出八個屋頂面以及兩牆面如圖 27 (e)。求取屋脊 線與階梯線如圖 27 (f) ,建物模型如圖 27 (g)。該 建物重建正確。
4.4.6 複雜山型屋測試(4)
該建物屬於複雜山型屋,有多屋脊線,如圖 28(a)。建物輪廓線和光達點雲如圖 28 (b)和圖 28 (c),以群聚法剔除屬於非建物點雲,如圖 28 (d)。
偵測 10 個屋頂面區塊如圖 28 (e),並求取屋脊線段 和修正,如圖 28 (f)和 28 (g)。建物模型如圖 28 (i)。
(a) (b) (c) (d)
(e) (f) (g) (h) 圖 26 複雜山型屋重建測試(2)
(a)建物影像 (b)建物外圍輪廓線 (c)原始光達點雲 (d)群聚法萃取成果 (e)建物頂共面分析 (f)求取結構線 (g)修正結構線 (h)建物模型
(a) (b) (c) (d)
(e) (f) (g) 圖 27 複雜山型屋重建測試(3)
(a)航空影像 (b)建物外圍輪廓線 (c)原始光達點雲 (d)群聚法萃取成果 (e)建物頂共面分析 (f)建物結構線 (g)建物模型
(a) (b) (c) (d)
(e) (f) (g) (h) 圖 28 複雜山型屋重建測試(4)
(a)航空影像 (b)建物外圍輪廓線 (c)原始光達點雲 (d)群聚法萃取成果 (e)建物頂共面分析 (f)求取結構線 (g)修正結構線 (h)建物模型
4.4.7 非平面屋頂建物
在非平屋頂面建物測試中,有連續兩棟的非平 面屋頂建物,其為圓弧頂建物,如圖 29(a)所示。
使用本方法,重建成果為多平面屋頂建物,如圖 29 (b)。因本研究所使用的是多面體模型,故該建 物暫定為重建正確。
(a) 建物影像 (b) 建物模型 圖 29 非平屋頂面建物重建測試
4.4.8 測試錯誤例(1)
在研究測區中,有棟複雜山型屋如圖 30(a)。
其建物點雲及三角網如圖 30 (b)。由圖可知,其點
數密度不足,約 0.4 點/m2,且分怖不均,導致屋
頂面偵測錯誤,只偵測兩個屋頂面。建物重建成果 如圖 30 (c),該建物重建錯誤。
(a) (b) (c) 圖 30 建物重建錯誤(1)
(a)建物影像 (b)建物點雲 (c)建物模型
4.4.9 測試錯誤例(2)
在測試區中,有棟複雜山型屋如圖 31(a)。其 周圍有樹覆蓋在建物屋頂面上,且樹高與建物高度
相近,無法正確萃取到建物點雲。亦因如此,無法 正確偵測牆面以及屋頂面,如圖 31 (b)圈所示,建 物重建錯誤。
(a) (b) 圖 31 建物重建錯誤(2)
(a)建物影像 (b)建物點雲
4.4.10 模塑誤差
在精度評估部分,本研究不探討光達取樣時之 誤差,而只探討模塑出來的模型跟光達點雲之間之 差異,故以模塑誤差(shaping error)進行精度評估。
計算方法為每屋頂面光達點雲先剔除粗差,剩餘點 雲再與產生的建物模型計算平均的垂距殘差量,當 作模塑誤差。
本研究針對正確和部份正確建物計算模塑誤 差 。 整 體 模 塑 誤 差 為 0.171m , 範 圍 約 0.004m~0.341m,與光達資料高程精度為 0.15m 相符 合。全區模塑誤差整理如圖 32。本研究針對重建 正確建物,套討點密度與建物模塑誤差之關係。於 測區中選取較具代表性之建物,逐步降低其點密 度,觀察其與模塑誤差關係,整理如圖 33。
0 5 10 15 20 25
0.00~0.05 0.05~0.10
0.10~0.15 0.15~0.20
0.20~0.25 0.25~0.30
0.30~0.35 模塑誤差(m)
建物個數
圖 32 模塑誤差
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
點 密 度 (點 / 平 方 公 尺 )
模塑誤差(公尺)
圖 33 點密度與模塑誤差關係圖
5. 結論與建議
本研究以資訊融合為概念,提出完整之程序,
結合光達資料以及大比例尺向量圖進行三維建物
模型重建。以研究結果之觀察,本法具有自動化之 潛力。
在萃取建物點雲部分,從測試結果可知,以群 聚法之觀念萃取建物,可有效地萃取不同層屋頂面 之建物點雲,並剔除非建物之點雲。
在建物重建成果部分,90%建物可重建正確,
8%建物可部分正確,錯誤之建物由於光達點數不 足,以及樹木影響而無法重建正確。故在未來中,
可提供使用者一點密度之指標,過低的點密度提示 該建物有錯誤之可能性。而在樹木影響中,萃取建 物點雲時加入反射值資料提高萃取可靠度。以建物 類別之觀察,在建物點數足夠的情況下,平頂屋和 簡易山型屋皆可重建正確。而在複雜山型屋以及非 平屋頂面建物中,約有一半之建物可重建正確。建 物重建正確率視建物頂情形和光達點雲密度及分 怖之影響。
在建物重建流程上,最關鍵之步驟為建物頂共 面分析,正確的牆面與屋頂面偵測,方有重建正確 之機會。而牆面與屋頂面偵測結果,受區塊成長法 參數之影響,包括牆面法向量、高程差、面積門檻、
屋頂面角度門檻、投影面積門檻。使用以三角網為 基礎(TIN based)之重建,雖可防止光達精度上之損 失,但亦受雜訊之影響。故在建物頂共面分析部 分,對區塊成長法參數較為敏感,在實際測試中,
有時角度門檻相差一度會產生不同之成果,導致共 面分析不正確。
在建物重建流程上,由成果可知,求取屋脊 線、階梯線、建物外部結構線方法是可行的,與真 實情況雷同。在修正結構線部分,利用三維點到對 應屋頂面垂距平方合最小之方法,計算匯集一點之 坐標點成果良好。在銜接到建物端點(building corner) 和多點匯集一點之判斷上,須一距離參數與半徑參 數定義,此參數在大多數建物重建中,以一般預設 即可。
在精度部分,模塑誤差約 0.171m,與光達資料 高程精度 0.15 m 相符合,可顯示此方法在模塑過 程中,精度無嚴重損失。
在建議部分,整個研究成果最關鍵的步驟為建
物頂共面分析,其對區塊成長法參數較敏感。若可 加入其他資訊,如三角網參數空間之群聚情形,光 達點雲某個剖面之分佈情形,作為區塊成長法參數 之參考,對於建物頂共面分析,具全自動化之潛 力。而建物重建錯誤偵測可使重建更加自動化,例 如利用模塑誤差,或是三維空間建物結構線之特性 來進行重建錯誤偵測。
在資料建議方面,若為結合影像與光達資料重 建,可從影像出發,以影像萃取建物外圍輪廓線,
或以光達網格資料萃取建物輪廓線。利用建物輪廓 線資訊,接續此研究方法,重建建物模型。
在光達點雲密度建議方面,由重建成果之觀 察,重建正確率受點密度之影響。若利用光達資料 進行建物重建時,提高點雲密度,則可提高重建正 確率,且建物上較小之物體,亦有重建之可能性。
致謝
本研究承蒙行政院國家科學委員會研究計劃 (編號:NSC93-2211-E-008-027)支持得以順利完成,
同時感謝行政院農委會提供台中地區之光達資 料,工研院能源與資源研究所提供屏東區域之光達 資料,以及內政部地政司提供向量圖。同時感謝太 空遙測中心的饒見有博士於方法上之幫助,使本研 究更加地自動化和完整。亦要感謝工研院能源與資 源研究所在實務面上提供許多寶貴之意見。
參考文獻
Benkő, P., Martin, R.R, & Várady, T., 2001, Algorithms for reverse engineering boundary representation models, Computer-Aid Design, Vol. 33, pp. 839–851.
Chen, L.C., Lai, Y.C., & Rau, J.Y., 2003, Fusion of LIDAR data and aerial images for building reconstruction, Proceedings of 24th Asia Conference on Remote Sensing, pp. 654-656.
Chen, L.C., & Rau, J.Y., 2003, Robust reconstruction
of building models from three-dimensional line segments, Photogrammetry Engineering &
Remote Sensing, Vol. 69, No .2, pp. 181-188.
Danahy, J., 1999, Visualization data needs in urban environmental planning and design, Proceedings of the Photogrammetric Week, pp. 351-365.
Förstner, W., 1999, 3D-city models: Automatic and semiautomatic acquisition methods, Proceedings of the Photogrammetric Week, pp.291- 304.
Halla, N., & Brenner, C., 1998, Interpretation of urban surface models using 2D building information, Computer Vision and Image Understanding, Vol. 72, No. 2, pp.204-214.
Jennifer, L., & Jeff, W., 1999, Scanning laser mapping of the coastal aone : the SHOALS system, ISPRS Journal of Photogrammetry &
Remote Sensing,Vol.54, pp.123-129.
Maas, H.G., 2002, Methods for measuring height and planimetry discrepancies in airborne laser scanner data, Photogrammetry Engineering &
Remote Sensing, Vol.68, No.9, pp.993-940.
Rau, J.Y., 2002, Geometrical building modeling and its application to the ortho- rectification for aerial image, Doctoral Dissertation, Department of Civil Engineering, National Central University, Taiwan.
Rottensteiner, F., & Briese, Ch., 2002, A new method for extraction in urban areas from high-resolution LIDAR data, IAPRS, Vol.
XXXIII, pp. 295-301.
Tseng, Y.H., & Wang, S., 2003, Semiautomated building extraction based on CSG model-image fitting, Photogrammetry Engineering & Remote Sensing, Vol. 69, No. 2, pp.171-180.
VolZ, S., & Klinec, D., 1999, Nexus: the development of a platform for location aware application, Proceedings of the third Turkish-German Joint Geodetic Days, Vol. 2, pp.
599-608.
Wehr, A., & Lohr, U., 1999, Airborne laser scanning – an introduction and overview, ISPRS Journal of Photogrammetry & Remote Sensing, Vol. 54, pp. 68-82.
Wolf, P.R., & Dewitt, B.A., 2000, Element of photogrammrtry with application in GIS, McGraw Hill press, 3rd edition.
Fusion of LIDAR Data and Large-Scale Vector Map for Building Reconstruction
Liang-Chien Chen
1Chih-Yi Kuo
2ABSTRACT
Cyber city is getting important. Building models, among others, could be the most important elements in a cyber city. Due to its maturity, LIDAR data has demonstrated profound potentials in fully automatic building reconstruction. LIDAR data contains plenty of height information, while vector maps preserve accurate building boundaries. From the viewpoint of data fusion, we strive to integrate two data to perform building modeling. The proposed scheme comprises three major steps: (1) preprocessing of LIDAR data and vector maps, (2) segmentation and detection of wall and roof faces, and (3) building modeling. In the preprocessing stage, the height variation of the above-ground objects is determined by subtracting the surface elevation from the terrain. The closed polygons for buildings are also obtained. In next stage, segmentation and detection of wall and roof faces is implemented by region growing. In the step of the building modeling, the construct edges of a building could be obtained. Then the 2D topology of building edges is obtained by SMS method. Finally, building models are reconstructed. The test data covers Tai-Chung city in Taiwan. The average density of LIDAR data is about 1.71 points per square meter. The vector maps are with a scale of 1:1,000. About 90% buildings are correctly reconstructed by the proposed method. The shaping error is about 0.17m.
Key Words: LIDAR, Vector Maps, Building Reconstruction, Triangulated Irregular Network
1 Professor, Center for Space and Remote Sensing Research, National Central University
2 Graduate Student, Center for Space and Remote Sensing Research, National Central University
Received Date: Sep. 29, 2005 Revised Date: Sep. 12, 2006 Accepted Date: Sep. 15, 2006