Research Express@NCKU - Articles Digest
Research Express@NCKU Volume 5 Issue 4 - August 1, 2008 [ http://research.ncku.edu.tw/re/articles/e/20080801/6.html ]
Sequential forecast of incident duration using
artificial neural network models
Chien-Hung Wei
1*, Ying Lee
21Department of Transportation & Communication Management, College of Management, National
Cheng Kung University
2Department of Hospitality Management, College of Management, Ming Dao University
*Email: [email protected]
Accident Analysis and Prevention, (2007): 39(5), 944-954
1
. IntroductionIncident is one of the main reasons causing traffic congestion. In 1988, the total amount of extra travel time and fuel consumption caused by congestion alone has been valued at an estimated $35 billion for 50 large U.S. urban areas. Freeway traffic in Taiwan is often congested due to the increasing number of vehicles and in particular due to incidents. The
uncertainty of travel time increases when the traffic condition is unknown. With advanced techniques, traffic data can be collected much more easily and adequately characterized. This study aims to develop a data fusion construct for the data collected, thereby providing useful information such as travel time information for travellers.
2. Literature review
In this study, data fusion is concerned with the problem of combining traffic data from multiple sensors in order to make inferences about traffic condition on a roadway of interest. Relevant techniques are needed to extract information from an individual database as well as to merge the data collected from different databases. The multi-source dataset is often composed of different statistical units or levels since it is normally gathered from different administrative sources.
In developing our data fusion model, the artificial neural network (ANN) has been chosen as the key technique. As one of the most prominent approaches widely used for solving complex problems, ANNs have recently been gaining popularity for transportation studies.
Incident duration is often a major component of providing real-time traffic information. Usually, the incident duration varies with the traffic conditions. In most studies, however, the forecasted incident duration is not periodically updated according to the traffic conditions at the time point of forecast. 3. Research methodology
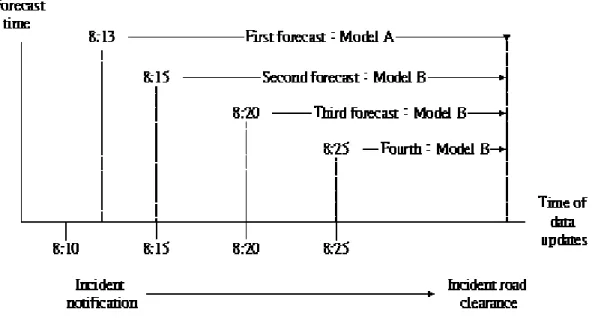
Many studies have discussed travel time forecast issues, although few of them have considered the influence of incidents in their models. This research uses Artificial Neural Networks as well as data fusion technique to build a multi-period forecast model for predicting incident duration. Two types of ANN incident duration models –Model A and Model B– are derived in this study. Figure 1 illustrates the time points to use these two models to conduct forecasts of incident duration. When an incident is noted for the first time, Model A provides a preliminary forecast by using the traffic data which represent the traffic situation right before the incident. After the incident, Model B takes over from Model A to 1 of 4
Research Express@NCKU - Articles Digest
perform forecasts with updated data. Model A and Model B together provide a sequential update for incident duration forecast.
Figure 1. Sequential forecast of incident duration
These two forecast models reflect the functional relationship between real-time traffic data as the input variables and incident duration as the output variable. Input variables include incident characteristics, traffic data, time relationship, space relationship, and geometry characteristics. Real-time traffic data are collected from loop vehicle detectors (VD) and incident advisory databases. When inputting
variables into the ANN model, the weights from input layer to hidden layer are calculated. Through the transfer function in the hidden layer, the input data are rescaled as inputs to the output layer. Since a discrepancy might occur between the estimated output and the actual incident duration, the weights are adjusted repeatedly by a suitable training method until the resulting error is stabilized and negligible. The incident duration function inside the ANN model is formed after this training procedure is completed. With these two models, the estimated duration can be provided by plugging in relevant traffic data as soon as an incident is noted.
4. Research results
The experimental site of this study, from Da-ya interchange to Lu-jhu interchange, is at the southern part of the No.1 national freeway in Taiwan. A dataset consisting of 24 incidents is constructed. For about 46% of the incidents, the duration is less than 30 minutes, 27% are between 31 minutes and 60 minutes, and 27% are more than 61 minutes. The 24 incidents are divided into two parts, with 18 incidents for ANN model training and 6 incidents for model testing. The 6 incidents for model testing are sampled randomly according to the relative frequency of duration.
Model A and Model B together provide a sequential forecast for incident duration. In contrast to
sequential forecasting, non-sequential forecasting provides the forecasted duration at each time point by subtracting the elapsed time from the forecasted duration of Model A. The definition of elapsed time is the time from incident notification to the time point of forecast.
4.1 Model evaluation by six experiments
Using the same sampling process, this study conducts six experiments. Correlation coefficient (ρ) of actual and predicted durations for both cases of non-sequential update and sequential update are reported in Table 1. These correlation coefficients, all greater than 0.72, indicate that the predicted 2 of 4
Research Express@NCKU - Articles Digest
incident durations are fairly close to the actual ones. Based on Table 1, performance of sequential update forecast is better than non-sequential update forecast in five out of six experiments.
Table 1. Correlation coefficient for both actual and forecasted durations
4.2 Model evaluation by time point of forecast
Model performance is further assessed in this section by individual time point of forecast. For investigating the accuracy of models, three criteria: mean absolute error (MAE), mean absolute percentage error (MAPE) and root mean square error (RMSE) are employed.
The performance of six experiments in average at the same time point of forecast is reported in Table 2. Under the same time point of forecast, the means of MAE value of sequential update forecast are 58~169 seconds lower than those of non-sequential update forecast. The means of MAPE value of sequential update forecast are about 10% lower than those of non-sequential update forecast. In terms of the means of RMSE value, the performance of sequential update forecast is improved by more than 78 seconds comparing to non-sequential update forecast.
These numeric results by MAE, MAPE and RMSE more equitably assess the respective results from sequential update and non-sequential update for incident duration prediction. With respect to Tables 1 and 2, the sequential forecast composed of Model A and Model B together provides better predictions. Table 2. Comparison of model evaluation
Mean is mean of the values in six experiments; SD is standard deviation of the values in six experiments 5. Conclusions
This study, based on data fusion construct, presents two incident duration models for multi-period forecast using Artificial Neural Networks. In terms of the model effect, the incident characteristics, VD data, time relationship, spatial relationship, and geometry characteristics are desirable inputs of the 3 of 4
Research Express@NCKU - Articles Digest
incident duration forecasting model. According to such criteria as correlation coefficient, MAE, MAPE and RMSE, the proposed sequential update models show good and stable performance. This reveals that the developed model fits the actual incident duration well during the incident, and that Artificial Neural Networks effectively smoothen data noise of various sources.
Non-sequential forecasting which uses only Model A to provide forecasted duration is simple and convenient. However, the updated prediction does not consider the real time traffic conditions. Sequential forecasting is more costly for modeling and data collection, while it can provide more accurate prediction for incident duration. Thus, trade-offs exist in practical applications between these two approaches.
With these two models, the estimated duration can be obtained by plugging in relevant traffic data as soon as an incident is noted. The travelers and traffic management units can generally realize the impact by the forecasted incident duration. From the assessment of model effects, this study shows that the proposed models are feasible in the Intelligent Transportation Systems (ITS) context.