DISCRETE-TIME SYSTEM REPRESENTATION
LECTURE 4
OUTLINE
• Obtain discrete-time models (State-space or transfer functions) from continuous-time models
• Continuous TF with sampler -> Discrete TF
• Continuous TF with ZOH -> Discrete TF
• Continuous TF with delay -> Discrete TF
• Continuous SS -> (ZOH augmented) Discrete SS
• Discrete TF -> Discrete SS
• Discrete SS -> Discrete TF
• Properties of discrete models (poles/zeros/eigenvalues…)
REVIEW OF MATHEMATICAL FACT
• Z-Transform is nothing but the Laplace Transform of sampled signals, i.e., the starred Laplace transform
• Convolution of two functions in time becomes
multiplication of two functions in the s- (or z-) domain.
(linked by Laplace or z-transform)
ANALYZING HYBRID SYSTEMS
ME561 Lecture 5- 3
Analyzing Hybrid Systems
• To analyze computer-controlled system, a unified approach is need to look at both continuous-time signals and sampled (discrete-time) signals
⇒ Laplace transform is still the tool of choice (with some added consideration for sampled signals)
C(z)
D/A u(kT) e(kT) A/D
T
G(s) + r
–
y u(t) e(t)
Critical elements to analyze: sampler, ZOH, delay
CONTINUOUS TF -> DISCRETE TF
• Commonly, some signals in a system are impulse sampled and
others are continuous. Continuous signals can be transformed into discrete ones by sampling
ME561 Lecture 5- 4
Continuous TF -> Discrete TF
• Commonly, some signals in a system are
impulse sampled and others are continuous.
Continuous signals can be transformed into discrete ones by sampling
dT
x(t) x*(t)
X(s) X*(s)
Recall the Laplace transform of the sampled signal (z-tranform) is:
[ ]
00
( ) *( ) *( ) *( ) s ( ) kTs
k
X z X s x t ∞ x τ e d− τ τ ∞ x kT e−
=
= = L =
∫
⋅ =∑
⋅X(kT)
CONTINUOUS-TIME SYSTEM WITH (INPUT) SAMPLER
ME561 Lecture 5- 5
Continuous-time System with (Input) Sampler
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
Y *( ) s = G *( ) s X ⋅ *( ) s
Fact: Y s ( ) = G s X ( ) ⋅ *( ) s Clear
( ) ( ) ( ) Y z = G z X z ⋅
Equivalently Fact:
Not readily clear (property of
Starred Laplace Transform to be proven)
ME561 Lecture 5- 5
Continuous-time System with (Input) Sampler
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
Y *( )s = G *( )s X⋅ *( )s
Fact:
Y s( ) = G s X( ) ⋅ *( )sClear
( ) ( ) ( ) Y z = G z X z⋅
Equivalently Fact:
Not readily clear
(property ofStarred Laplace Transform to be proven)
Fact:
ME561 Lecture 5- 6
Proof:
0
0 0
0 0
0
( ) ( ) *( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
t
t t
k k
k
y t g t x d
g t x kT d g t x kT d
g t kT x kT
τ τ τ
τ ∞ τ δ τ τ ∞ τ τ δ τ τ
= =
∞
=
= − ⋅
= − ⋅ − = − ⋅ −
= − ⋅
∫
∑ ∑
∫ ∫
∑
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
Y *( ) s = G *( ) s X ⋅ *( ) s
OrY z ( ) = G z X z ( ) ⋅ ( )
[ ]
0 0
( )
0 0 0
0 0
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) , where
( ) ( ) ( ) ( )
n
n k
n k m
k n k k m
m k
m k
Y z Z y t g nT kT x kT z
g nT kT x kT z g mT x kT z m n k
g mT z x kT z G z X z
∞ ∞
−
= =
∞ ∞ ∞ ∞
− − +
= = = =
∞ ∞
− −
= =
= = − ⋅
= − ⋅ ⋅ = ⋅ ⋅ = −
= ⋅ ⋅ ⋅ = ⋅
∑ ∑
∑∑ ∑∑
∑ ∑
j
k k = j
j
k k = j
ME561 Lecture 5- 6
Proof:
0
0 0
0 0
0
( ) ( ) *( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
t
t t
k k
k
y t g t x d
g t x kT d g t x kT d
g t kT x kT
τ τ τ
τ ∞ τ δ τ τ ∞ τ τ δ τ τ
= =
∞
=
= − ⋅
= − ⋅ − = − ⋅ −
= − ⋅
∫
∑ ∑
∫ ∫
∑
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
Y *( )s = G *( )s X⋅ *( )s Or Y z( ) = G z X z( ) ⋅ ( )
[ ]
0 0
( )
0 0 0
0 0
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) , where
( ) ( ) ( ) ( )
n
n k
n k m
k n k k m
m k
m k
Y z Z y t g nT kT x kT z
g nT kT x kT z g mT x kT z m n k
g mT z x kT z G z X z
∞ ∞
−
= =
∞ ∞ ∞ ∞
− − +
= = = =
∞ ∞
− −
= =
= = − ⋅
= − ⋅ ⋅ = ⋅ ⋅ = −
= ⋅ ⋅ ⋅ = ⋅
∑ ∑
∑∑ ∑∑
∑ ∑
j
k k = j
j
k k = j
PROPERTY OF STARRED LAPLACE TRANSFORM
ME561 Lecture 5- 7
Property of Starred Laplace Transform
Y *( )s = G s X( )⋅ *( ) *s = G s( ) *⋅X *( )s = G *( )s X⋅ *( )s
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
Y s( ) = G s X( ) ⋅ *( )s
x ( t )
X ( s ) G ( s )
y ( t )
Y ( s )
Y z( ) = Z Y s( ) = Z G s X s( ) ( ) = Z GX s( ) = GX z( ) ≠ G z X z( ) ( )
( ) ( ) ( )
Y z = G z X z ⋅
Unless constant or pure delay (Ex4.3 to be explained later)
Given
UNLESS CONSTANT
OR PURE DELAY
SUMMARY — CONTINUOUS-TIME SYSTEM WITH INPUT SAMPLER
ME561 Lecture 5- 8
Summary-- Continuous-time System with Input Sampler
• If the input to a continuous-time system G(s) is an impulse-sampled signal (i.e., G(s) is preceded by a sampler), then it makes sense to calculate the z-
transform of this transfer function, and the
corresponding pulse transfer function of G(s) is given by
[ ]
1[ ]
( ) ( ) ( )
G z Z G s
−G s
t kT= = Z L
=( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( )
ME561 Lecture 5- 9
Ex4.1 Calculating Pulse Transfer Function (Continuous-time system with sampler)
( )
G s x t*( ) x t( ) ( )
y t
*( ) y t
( )
*( ) X s X s
*( )
Y s Y s( ) G s
( ) = s a
+ 1
Method I: (Table lookup)
From the z-transform table (Table 3.1), we have
G z s a
z
z e aT e aT z ( ) =
L
+NM O
QP
= − − = − − −Z 1 1
1 1
Method II: (Direct Calculation)
The impulse response for G(s) is
ME561 Lecture 5- 10
Ex4.1 (cont.)
[ ]
( )
1( )
atg t = L
−G s = e
−Method II: (Direct Calculation)
The impulse response for G(s) is
Hence
[ ]
1[ ]
( ) ( ) ( )
G z Z G s
−G s
t kT= = Z L
=g kT( ) = e−akT , k = 0 1 2, , ,...
G z g kT e z e z
e z e z
akT k
k
aT k
k aT aT
( ) = ( ) = ⋅ = =
− =
−
− −
=
∞ −
=
∞
− − −
∑ ∑
Z
0 0
1 1
1 1
1
c h c h
1PULSE TRANSFER FUNCTION OF CASCADED SYSTEMS
ME561 Lecture 5- 11
Pulse Transfer Function of Cascaded Systems
dT x*(t) x(t)
X*(s) X(s) dT G(s)
u*(t) u(t) U*(s) U(s) dT H(s)
y*(t) y(t) Y*(s) Y(s)
dT
x*(t) x(t) X*(s) X(s) u(t) G(s)
H(s) U(s) dT
y*(t) y(t) Y*(s) Y(s)
(a)
(b)
Two similar configurations, systems in cascade with/without
a sampler in between
CASE (A)
ME561 Lecture 5- 12
Case (a)
dT x*(t) x(t)
X*(s) X(s) dT G(s)
u*(t) u(t) U*(s) U(s) dT H(s)
y*(t) y(t) Y*(s) Y(s)
U s( ) = G s X( )⋅ *( )s and Y s( ) = H s U( ) ⋅ *( )s
U *( )s = G *( )s X⋅ *( )s and Y *( )s = H *( )s U⋅ *( )s
Y *( )s = H *( )s G⋅ *( )s X⋅ *( )s
Y z ( ) = H z G z X z ( ) ⋅ ( ) ⋅ ( )
H z( ) = Z H s( ) G z( ) = Z G s( )
PSLT
CASE (B)
ME561 Lecture 5- 13
Case (b)
dT x*(t) x(t)
X*(s) X(s) u(t) G(s)
H(s) U(s) dT
y*(t) y(t) Y*(s) Y(s)
Y s( ) = H s G s X( ) ( )⋅ *( )s = HG s X( ) ⋅ *( )s
Y *( )s = H s G s( ) ( ) *⋅X *( )s = HG s( ) *⋅X *( )s
Y z
( ) =
HG z X z( ) ⋅ ( )
PSLT
( ) ( ) H z G z
≠
EX4.3 PULSE TRANSFER FUNCTION OF CASCADED SYSTEMS
ME561 Lecture 5- 14
Ex4.3 Pulse Transfer Function of Cascade Systems
dT x*(t) x(t)
X*(s) X(s) dT G(s)
u*(t) u(t) U*(s) U(s) dT H(s)
y*(t) y(t) Y*(s) Y(s)
G s s a H s
( ) = ( ) s b
+ =
+
1 1
and
[ ] [ ]
( )( )
2
( ) ( ) ( ) ( ) ( )
( )
1 1
bT aT bT aT
Y z H z G z Z H s Z G s X z
z z z
Z Z
s b s a z e− z e− z e− z e−
= = ⋅
= ⋅ = ⋅ =
+ + − − − −
Solution:
Case (a)
ME561 Lecture 5- 15
Ex4.3 (cont.)
dT x*(t) x(t)
X*(s) X(s) u(t) G(s)
H(s) U(s) dT
y*(t) y(t) Y*(s) Y(s)
G s s a H s
( ) = ( ) s b
+ =
+
1 1
and
Solution:
Y z
X z HG z HG s H s G s
s b s a a b s b s a a b
z z e
z
bT z e aT
( )
( ) ( ) ( ) ( ) ( )
( ) ( )
= = =
= + ⋅
L
+NM O
QP
= −L
+ − +NM O
L QP
NM O
QP
= −L
− − −NM O
QP
− −
Z Z
Z 1 1 Z 1 1 1 1
( )
( )( )
1
( )
bT aT
bT aT
z e e
a b z e z e
− −
− −
= −
− − −
( )( )
2
bT aT
z
z e− − z e− −
vs.
Case (b)
Case (a)
PULSE TRANSFER FUNCTION OF CLOSED-LOOP SYSTEMS
ME561 Lecture 5- 16
Pulse Transfer Function of Closed-Loop Systems
dT
e(t) E(s) e*(t)
E*(s) y(t) G(s)
Y(s)
H(s)
r(t) R(s)
+ –
E s R s H s Y s Y s G s E s
( ) ( ) ( ) ( ) ( ) ( ) *( )
= −
= ⋅
E s( ) = R s( ) − H s G s E( ) ( )⋅ *( )s
E *( )s = R *( )s − H s G s( ) ( ) *⋅E *( )s = R*( )s − HG *( )s E⋅ *( )s PSLT
E s
HG s R s
*( ) = *( ) *( )
+ 1 ⋅
1 Y s
G s
HG s R s
*( ) *( )
*( ) *( )
= + ⋅
1
Y z G z
HG z R z
( ) ( )
( ) ( )
= + ⋅
1
OTHER
CONFIGURATIONS
ME561 FALL 2001
H. Peng and George T.-C Chiu ©1994- 2001 SYSTEM REPRESENTATION – 8 – K. Ogata, Discrete-Time Control Systems, Prentice Hall, 2nd Ed., 1995.
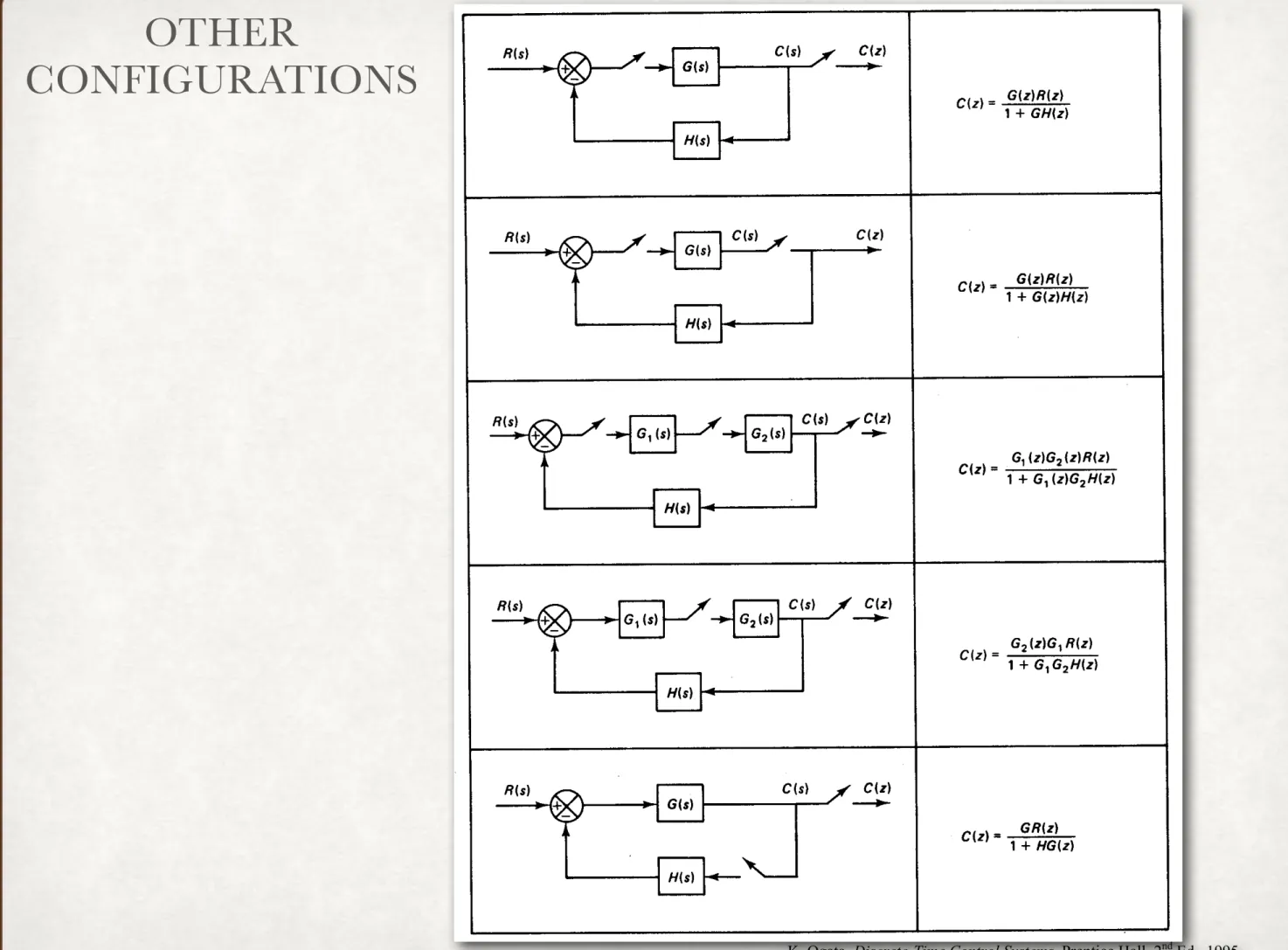
Table 4.1 Pulse Transfer Function of Five Typical Closed-Loop System Configurations From Figure 4.6, we see that
Y s( )= G s G( )⋅ C*( )s E⋅ *( )s or Y s*( )= G s G*( )⋅ C*( )s E⋅ *( )s Using the z-transform notation, we get
Y z( )= G z G z E z( )⋅ C( )⋅ ( )
where G z( )= Z G s( ) . Since E z( ) = R z( )−Y z( ), we have
OUTLINE
• Obtain discrete-time models (State-space or transfer functions) from continuous-time models
• Continuous TF with sampler -> Discrete TF
• Continuous TF with ZOH -> Discrete TF
• Continuous TF with delay -> Discrete TF
• Continuous SS -> (ZOH augmented) Discrete SS
• Discrete TF -> Discrete SS
• Discrete SS -> Discrete TF
• Properties of discrete models (poles/zeros/eigenvalues…)
CONTINUOUS-TIME PRECEDED BY ZOH
ME561 Lecture 5- 18
Continuous-time System Preceded by ZOH
[ ]
* ( ) P ( ) ZOH ( ) * * ( )
Y s = G s G⋅ s ⋅ U s G s e
ZOH s
Ts
( ) = 1− − Y z
U z( ) G s GP ZOH s G z ( ) = Z ( )⋅ ( ) = ( )
G z e
s G s G s
s e G s
s
G s
s z G s
s
Ts
P P Ts P P P
( ) ( ) ( ) ( ) ( ) ( )
=
L
−NM O
QP
=L
NM O
QP
−L
NM O
QP
=L
NM O
QP
− ⋅L
NM O
QP
− − −
Z 1 Z Z Z 1 Z
G z z G s
s
z z
G s s
P P
( ) ( ) ( ) ( )
= −
L
NM O
QP
= −L
NM O
−
QP
1 1 1
Z Z
Pure delay comes out directly
GP(s) y(t)
Y(s) GZOH(s) u(k) or u*(t)
U(z) or U*(s) u(t)
Plant U(s) ZOH y(k) or y*(t)
Y(z) or Y*(z) G(z) or G*(s)
REVIEW OF ZOH
ME561 Lecture 5- 19
Review of ZOH
f t ( ) = f kT ( ) for kT ≤ < t ( k + 1 ) T
Unit Impulse Response
X s x t t t T
s s e e s
R R
sT
sT
( ) = ( ) = ( ) − ( − )
= −
= −
−
−
L L 1 L 1
1 1 1
GZOH(jω)
x*(kT) X*(jω) xR(t)
XR (jω)
Time 0
1
Time 0
1
T
G s e
ZOH s
sT
( ) = 1− −
0 Time 1
T
“An integrator that is automatically reset to zero after one sampling period”
ME561 Lecture 5- 19
Review of ZOH
f t( ) = f kT( ) for kT ≤ <t (k +1)T
Unit Impulse Response
X s x t t t T
s s e e s
R R
sT
sT
( ) = ( ) = ( ) − ( − )
= −
= −
−
−
L L 1 L 1
1 1 1
GZOH(jω)
x*(kT) X*(jω) xR(t)
XR (jω)
Time 0
1 Time
0 1
T
G s e
ZOH s
sT
( ) = 1− −
0 Time 1
T
“An integrator that is automatically reset to zero after one sampling period”
ME561 Lecture 5- 20
Ex4.2
( ) G s
( ) x t
*( ) y t
( ) X s
*( )
Y s zoh
*( )
x t 1
( ) ( 1) G s = s s
+
Delays that are integer multiple of sample period can be taken out and replaced with the proper z-1 terms
[ ] [ ]
( )
21 1
1
( ) ( ) ( ) ( )
( 1) 1
( 1)
Ts
P ZOH
Ts
G z G s G s G s e
s e
s s
s s
−
− −
= = ⋅ ⋅
+
= ⋅
− +
Z Z = Z
Z
(
1)
21 1 (
z 1)
s s
= − ⋅
− Z +
( )
2( ) 1 1 1 1
1 G z z 1
s s
s
∴ = − − ⋅ − +
Z +
(
1)
( 1 2( 1 ) (1 )
1 ) 1 ( 1)( )
T T
T T
T
T e z e Te
z z
z
z e e
T z
z z z
z
− − −
−
−
−
− + + −
−
= − − + = −
−
− −
−
ME561 Lecture 5- 21
Ex4.4
( ) G s
( ) x t
*( ) y t
( ) X s
*( )
Y s zoh
*( ) x t
G s K
P( ) = s a
+
1 ( ) 1
( ) (1 ) (1 )
( )
G sP k
G z z z
s s s a
− −
= − ⋅ = − ⋅
Z Z +
(
1 z−1)
Ka 1s s 1 a z −z a1 K −1 1s s 1 a= − ⋅ − = ⋅ −
+ +
Z Z L
(
1)
1 11 at
t kT
e akT
z K z K
z a − z a e−
=
− −
= ⋅ Z − = ⋅ Z −
1 1
aT
z z e a z
z z
z K
−
= − −
−
−
(
1 aT)
aT
K e
a z e
−
= − −
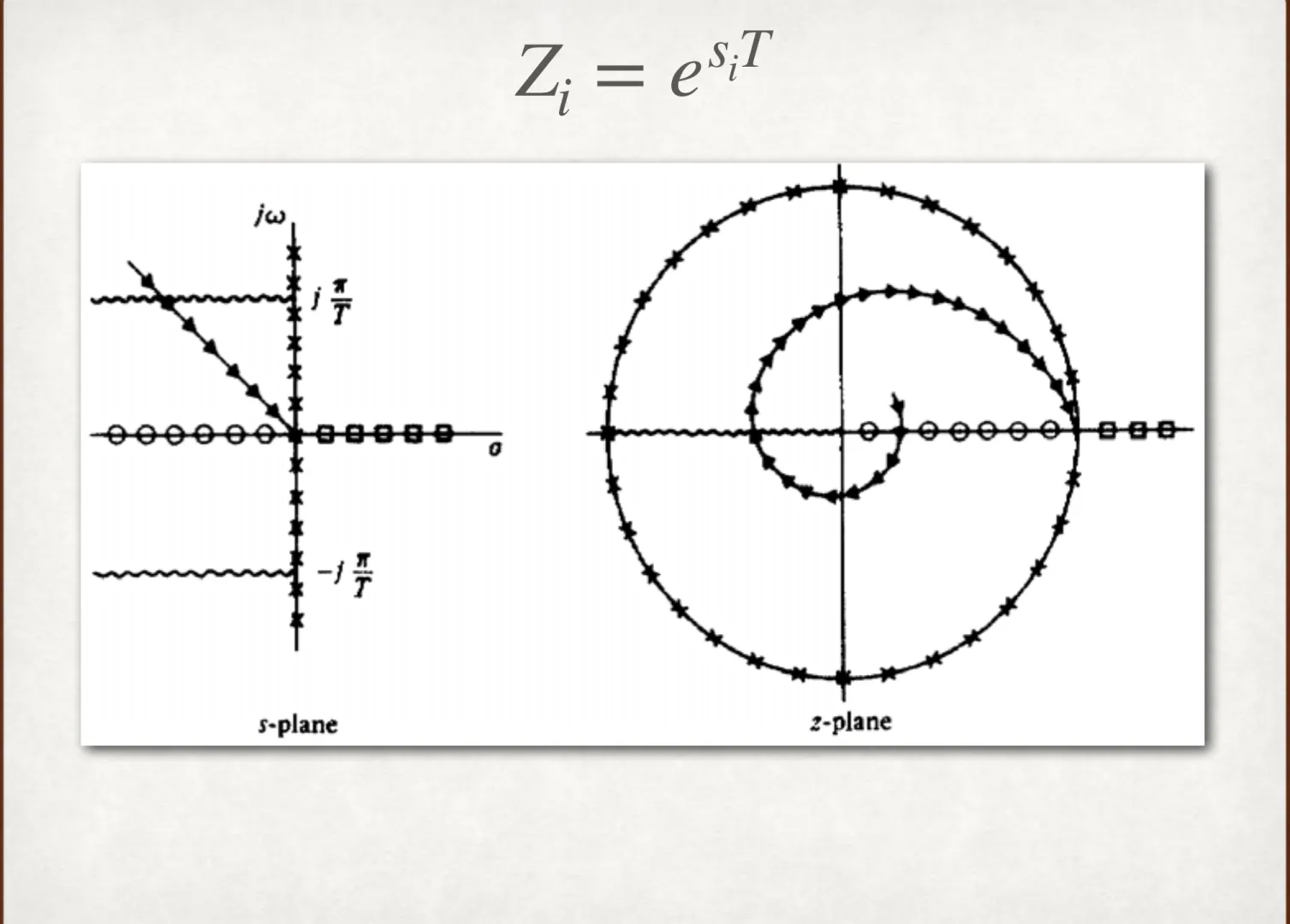
− C.T. pole: Note −a D.T. pole: e –aT ( recall z = esT )
AN IMAGINED APPLICATION
ME561 Lecture 5- 22
An Imagined Application
r(t) R(s) r(k)
R
*(s) C(z)
ZOH G(s)
U
*(s)
Y
*(s)
Y
*(s) u(k)
y(k)
y(k)
e(k) E
*(s)
What techniques do we need for the analysis of this Control problem?
What techniques do we need for the analysis of
this control problem?
TABLE FOR SYSTEMS PRECEDED BY ZOH
ME561 Lecture 5- 23
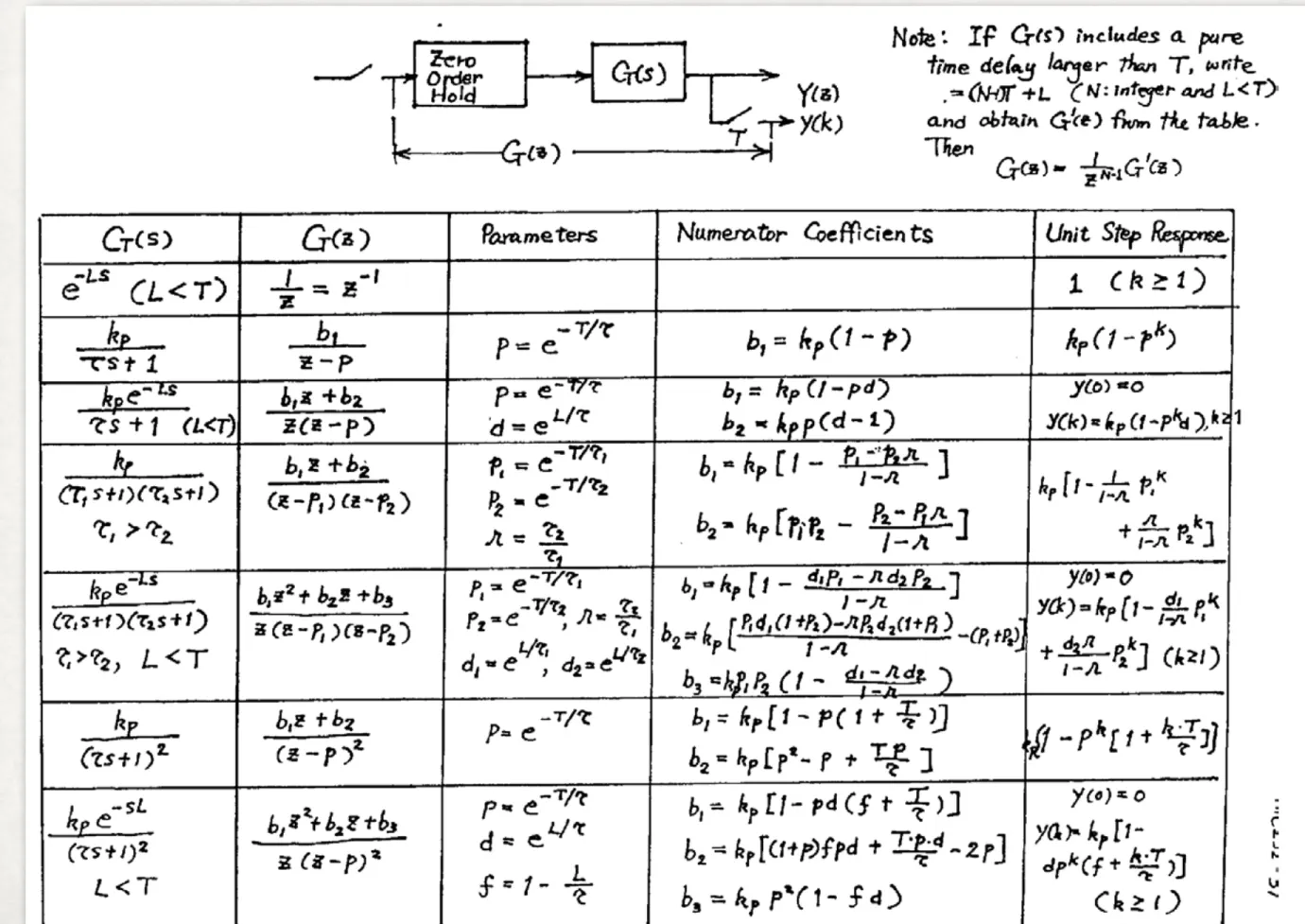
Table for Systems Preceded by ZOH
-- M. Tomizuka, ME232 Notes, UC Berkeley
ZOH EQUIVALENCE OF SYSTEM WITH TIME DELAY
ME561 Lecture 5- 24
ZOH Equivalence of System with Time Delay
G sP
( ) =
e−T sD⋅
G s( )
TD = nT + TL(
1)
1 1( ) 1 ( )
1 L L
T T
n
s s
k n
t T
e G s z e G s
z z
s z s
− −
− − −
+
=
⋅ − ⋅
= − Z = Z L
(
1)
( )(
1)
( )( ) 1 1 L
T s p P
n s T
G s e G s
G z z Z z Z e
s s
− − − − ⋅
= − = −
(
1)
1( ) 1 ( )
( ) 1 Ls Ls
p
n T
n
T G s z G s
G z z z e e
s z s
− −
− −
+
⇒ = − ⋅ ⋅Z ⋅ = − ⋅Z ⋅
EX4.5 ZOH EQUIVALENT WITH TIME DELAY
ME561 Lecture 5- 25
Ex4.5 ZOH Equivalent with Time Delay
G s e
P s
s
( )
= .
+
−0 5
1
Find the equivalent ZOH transfer function with a sampling time of 0.2 sec.
Since TD = 0.5 sec, we can select n = 2 and TL = 0.1
Solution:
0.1
0.1
2 1 3
1 1 1 1
( ) ( 1) 1
s
z e z s
G z e
z s s z s s
− −
+
− −
= = −
+ +
Z Z
Use the following facts:
1
1 1
1 T
Z z
s z
Z z
s z e−
= −
+ = −
G
p(s) = e
−0.5ss + 1
ME561 Lecture 5- 26
Ex4.5 (cont.)
0.1 1 1
1 Z e s
s z
− =
−
0.1
0.1 0.1 0.1 0.2 0.1
1 1 0.2
1
1 k
s t T k
k
k e
Z e Z e Z e Z e
s z e
− − + − + ∞ − + −
= −
∞
= = = = =
+ −
( )
0.1
3 0.2 3
1 1 0.0952 0.0861
( ) 1 0.8187
z e z
G z z z z e z z
−
−
− +
= − =
− − −
0.1 1 2
1
1 1
1 0 1
s k
k
Z e z z z
s z
− ∞ − − −
=
= ⋅ = + + + =
∑
−0.1
0.1 1 2
0
0.1 0.3
.2
1 0
1
s e
Z e z z
s e e z
e
− − − − − −
= + + + = −
+ −
OUTLINE
• Obtain discrete-time models (State-space or transfer functions) from continuous-time models
• Continuous TF with sampler -> Discrete TF
• Continuous TF with ZOH -> Discrete TF
• Continuous TF with delay -> Discrete TF
• Continuous SS -> (ZOH augmented) Discrete SS
• Discrete TF -> Discrete SS
• Discrete SS -> Discrete TF
• Properties of discrete models (poles/zeros/eigenvalues…)
STATE SPACE REPRESENTATION
ME561 Lecture 6- 3
x(t) or x(k) n ¥ 1 vector State Vector u(t) or u(k) r ¥ 1 vector Input Vector
y(t) or y(k) m ¥ 1 vector Output Vector F or A n ¥ n matrix System Matrix
G or B n ¥ r matrix Input Matrix C(t) or C(k) m ¥ n matrix Output Matrix
D(t) or D(k) m ¥ r matrix Direct Transmission Matrix
State Space Representation
( ) ( ) ( )
( ) ( ) ( )
t t t
t t t
= ⋅ + ⋅
= ⋅ + ⋅
x F x G u y C x D u
Continuous-Time
( 1) ( ) ( )
( ) ( ) ( )
k k k
k k k
+ = ⋅ + ⋅
= ⋅ + ⋅
x A x B u
y C x D u
Discrete-Time
STATE SPACE AND I/O
ME561 Lecture 6- 4
State Space and I/O
• Data needed to represent a LTI system:
( ) ( ) ( )
( ) ( ) ( )
t t t
t t t
= ⋅ + ⋅
= ⋅ + ⋅
x F x G u y C x D u
( 1) ( ) ( )
( ) ( ) ( )
k k k
k k k
+ = ⋅ + ⋅
= ⋅ + ⋅
x A x B u
y C x D u
Continuous-Time Discrete-Time
F G C D
x x
y u
F G
C D u y
x 1 s x
F G C D
A B C D
( )k x
( )k u
(k +1) x
( )k y
A B C D A B C D
( )k ( )k u
y
1 z x( )k (k +1)
x
Often referred to as system (A,B,C,D)
ZOH EQUIVALENT SYSTEM
ME561 Lecture 6- 5
ZOH Equivalent System
Given
the dynamics
and the selected sampling time T (for the sampling and ZOH),
can we figure out the equivalent discrete-time representation
x A x B u
y C x D u
( ) ( ) ( )
( ) ( ) ( )
k k k
k k k
+ = ⋅ + ⋅
= ⋅ + ⋅
1
i.e., what is the relationship between (F,G) and (A,B)?
C and D remain unchanged.
F G C D
F G
C D u y
x 1 s x
( ) ( ) ( )
( ) ( ) ( )
t t t
t t t
= ⋅ + ⋅
= ⋅ + ⋅
x F x G u y C x D u
A B
C D A B
C D u( )k ( )k
y
1 z x( )k (k +1)
x
ZOH u( )k
( )k
y F G
C D u
x 1 s x
y
ME561 Lecture 6- 5
ZOH Equivalent System
Given the dynamics
and the selected sampling time T (for the sampling and ZOH), can we figure out the equivalent discrete-time representation
x A x B u
y C x D u
( ) ( ) ( )
( ) ( ) ( )
k k k
k k k
+ = ⋅ + ⋅
= ⋅ + ⋅
1
i.e., what is the relationship between (F,G) and (A,B)?
C and D remain unchanged.
F G C D
F G
C D u y
x 1 s x
( ) ( ) ( )
( ) ( ) ( )
t t t
t t t
= ⋅ + ⋅
= ⋅ + ⋅
x F x G u y C x D u
A B
C D A B
C D u( )k ( )k
y
1 z x( )k (k +1)
x
ZOH u( )k
( )k
y F G
C D u
x 1 s x
y