行政院國家科學委員會專題研究計畫 成果報告
智慧校園監控系統 研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 95-2221-E-011-218-
執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 郭景明
計畫參與人員: 碩士班研究生-兼任助理:盧育誠、曾昱筌、田揚臣、楊鐘 德、蘇紹銓
報 告 附 件 : 出席國際會議研究心得報告及發表論文
處 理 方 式 : 本計畫可公開查詢
中 華 民 國 96 年 11 月 12 日
行政院國家科學委員會補助專題研究計畫 V 成 果 報 告
□期中進度報告 智慧校園監控系統
計畫類別:V 個別型計畫 □ 整合型計畫 計畫編號:NSC 95-2221-E-011-218-
執行期間:2006 年 8 月 1 日至 2007 年 7 月 31 日
計畫主持人:郭景明 共同主持人:
計畫參與人員: 盧育誠、曾昱筌、田揚臣、楊鐘德
成果報告類型(依經費核定清單規定繳交):V 精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
V 出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立台灣科技大學
中 華 民 國 96 年 11 月 12 日
附件一
可供推廣之研發成果資料表
V 可申請專利 V 可技術移轉 日期:96 年 11 月 12 日
國科會補助計畫
計畫名稱:智慧校園監控系統
計畫主持人:郭景明 計畫編號:NSC 95-2221-E-011-218-
學門領域:影像處理 技術/創作名稱 智慧校園監控系統 發明人/創作人 郭景明
技術說明
中文:本研究利用遞迴式自我學習程序及混成式二值化技術達成車 牌定位及字元切割之高成功率,技術裏結合色階調諧法,外觀比判 斷及霍夫轉換,以解決影像中之對比問題、拍攝之旋轉問題及車牌 髒污問題,經過實驗證明,本技術之成功率可超越國際上許多現有 的技術。
關鍵詞: 車牌辨識系統、車牌定位、字元切割、字元辨識
英文:License Plate Localization (LPL) and Character Segmentation (CS) play key roles in License Plate Recognition System (LPRS). In this study, we dedicate ourselves in these two issues. In LPL, the histogram equalization is employed to solve the low contrast and dynamic range problem; the texture properties, e.g., aspect ratio, and color similarity are used to locate the License Plate (LP); the Hough transform is adopted to correct the rotation problem. In CS, the hybrid-binarization technique is proposed to effectively segment the characters in the dirt LP. The feedback self-learning procedure is also employed to adjust the parameters in the system. As documented in the experiments, good localization and segmentation results are achieved with the proposed algorithms.
Key Words: license plate recognition system, plate localization, character segmentation, character recognition.
可利用之產業 及 可開發之產品
停車場暨大門監控管理系統,警方查緝贓車系統,道路管控系統,
電子行車收費系統
技術特點
1. 利用遞迴式自我學習程可達到準確之車牌定位效果。
2. 利用混成式二值化可達到抵抗影像低對比及髒污之問題。
3. 結果霍夫轉換技術可解決攝像時旋轉之問題。
附件二
推廣及運用的價值
對於學術研究方面,車牌辨識是多媒體處理的重要的研究主 題,本計畫藉由 “智慧校園監控系統"整合研究內容,配合國 家數位服務科技的重點發展領域,各子計畫交互協助建立一個 可 以 提 供 學 校 師 生 高 品 質 生 活 環 境 的 智 慧 校 園 (Smart Campus)。計畫強調「智慧安全的校園環境」與「自在學習的校 園環境」的建立,並特別重視肢障師生的智慧化校園生活服務。
智慧校園是智慧社區(Smart Community)的縮影,但環境比智慧 社區單純,因此更適合探討相關的科技服務項目與技術,讓此 計畫不僅可提升技術層次、亦可同時對學術理論做出貢獻。
在其他應用方面,本計畫各階段研究主題所可衍生的應用簡列 如下:
車牌辨識:電子行車收費系統、路上車流資訊控管、提供警察 查緝贓車的資訊、改善交通、減少交通擁擠、縮短 行車時間、降低肇事率等。
※ 1.每項研發成果請填寫一式二份,一份隨成果報告送繳本會,一份送 貴單位 研發成果推廣單位(如技術移轉中心)。
※ 2.本項研發成果若尚未申請專利,請勿揭露可申請專利之主要內容。
※ 3.本表若不敷使用,請自行影印使用。
中文摘要
本研究利用遞迴式自我學習程序及混成式二值 化技術達成車牌定位及字元切割之高成功率,
技術裏結合色階調諧法,外觀比判斷及霍夫轉 換,以解決影像中之對比問題、拍攝之旋轉問 題及車牌髒污問題,經過實驗證明,本技術之 成功率可超越國際上許多現有的技術。
關鍵詞: 車牌辨識系統、車牌定位、字元切割、
字元辨識
Abstract-License Plate Localization (LPL) and Character Segmentation (CS) play key roles in License Plate Recognition System (LPRS). In this study, we dedicate ourselves in these two issues. In LPL, the histogram equalization is employed to solve the low contrast and dynamic range problem; the texture properties, e.g., aspect ratio, and color similarity are used to locate the License Plate (LP); the Hough transform is adopted to correct the rotation problem. In CS, the hybrid-binarization technique is proposed to effectively segment the characters in the dirt LP. The feedback self-learning procedure is also employed to adjust the parameters in the system. As documented in the experiments, good localization and segmentation results are achieved with the proposed algorithms.
Index terms: license plate recognition system, plate localization, character segmentation, character recognition.
1. INTRODUCTION
License plate recognition system is the product of modern life, which can be separated into three parts: (i) detecting the location of the LP, namely LPL, (ii) segmenting the characters inside the LP, namely CS, and (iii) recognizing the meaning of the characters, namely Character Recognition (CR).
Many state-of-the-art methods have been addressed in the progress of the LPRS. Some methods have also been marketed. However, most schemes are restricted by some practical restrictions, such as recognition time, lighting condition, unstable environment, image resolution, and etc.
To develop a robust system to adapt the various issues is challenge.
Regarding the LPL, in general, the literatures can be separated into two parts: (i) based on the textures of the LP and (ii) based on the colors of the LP. The methods are discussed below.
The methods based on the textures mainly exploited the aspect ratio [2], [9], [12], the contrast variations [10], the uniform distribution of the characters [4], the ratio between background area and character area [6], [8]. Among these, the approaches in [2] and [12] are applied to the LPRS in Saudi Arabia. The main idea is to process the image with the grayscale image, and employs the Sobel edge detection, projection, and seed-filling algorithm [7] to remove the regions unrelated to the LP. The result is then
filtered by aspect ratio and object connections. However, the method is not capable of dealing with the complex environment and rotation. Nonetheless, the rotation problem can be eased by considering the rotation extent [9]. Hsieh et al., [4] employed the Wavelet transform to decompose the image into HH, HL, LH, and LL four bands. The searching range of the LP is restricted according to the image property in LH band in order to improve the processing speed. The projection method, edge density, and aspect ratio are then exploited to locate the LP. This approach is proven to be
effective in withstanding the variation of the lighting, contrast, rotation, and is also capable of locating multiple plates. Wu et al., [8] adopted the morphological and projection to localize the LP. The method exploited the ratio between background area and character area and used the opening operation to blur the image. The processed image is compared to the original image. The discrepancy part is then processed with the projection method in order to locate the LP. The advantage of this method is the high efficiency, while the disadvantage is easily undergone the interference of the lighting effect.
The methods based on the colors are discussed as follows. Zhang and Xiangjian [6] adopted mean shift to blur the image, and then localized the LP via applying Mahalanobis distance linear classifier to classify the candidate regions according to the rectangularity, aspect ratio, and edge density. Syed and Sarfraz [1] adopted the Vector angle measure [3] to retrieve the color edge, and then enhanced the edge. The object connection is applied to the classified regions separated by the edges and further locates the LP. Chang et al., [5] converted the RGB color space to HSI model and then performed the blurring processing to reduce the interference of the noise. The clustered edge property of the LP is exploited to cooperate with the HSI color spaces to locate the LP. The advantage of this method is capable of withstanding the interference of the environment.
Yang et al., [11] simultaneously adopted textures and colors to locate the LP, where the color collocation of the plate’s background, characters, and the plate’s structure are exploited. The plate’s region is then binarized, segmented and recognized. The advantage is the high efficiency and good localization result. The disadvantage is vulnerable in dealing with low contrast or poor color.
In this study, a LPL method and a CS method are presented to overcome the issues raised in the literatures, which include complex environment, rotation, lighting, and low contrast. Briefly, the histogram equalization [13] is employed to solve the lighting and contrast problem. The texture property, aspect ratio, and color similarity are used to address the complex environment issue. The Hough transform is adopted to correct the rotation problem.
Moreover, the feedback self-learning strategy is also employed to adaptively adjust the parameters. Finally, the proposed hybrid-binarization is applied to solve the dirt problem in CS.
The rest of the study is organized as follows. Section 2 introduces the license plate localization. The character segmentation is presented in Section 3. Section 4 describes a series of experiments that were performed to test the performance of the algorithm. Conclusions are drawn in Section 5.
2. LICENSE PLATE LOCALIZATION (LPL) The main difficulty of the LPL is the environment. For example, the outdoor parking spaces have at least one more problem than indoor parking spaces for the influence by the sunlight. Hence, the performance of most recognition systems varies a lot according to the energy of the sunlight.
For this, in this study, the histogram equalization is adopted to reduce the sunlight or low contrast problems. The other solution is the well-known contrast stretching, which is also capable of improving low dynamic range image. However, it performs poor in back-lighted conditions, which can be totally solved with the histogram equalization.
The typical LP in Taiwan has two English letters and four Arabic numerals. The configurations of different cars
are somewhat different; some cars with English letters in the front, whereas some are in the back as shown in Fig. 1.
Nonetheless, the colors are united as black and white. Hence, the number of the characters and the color are employed in this study to identify LP. In some cases, the radiators or bumpers have similar textures as plates. For this, the high gradient property between black characters and white background, and aspect ratio are employed to remove the irrelative objects. Sometimes, the relative positions between camera and car cause rotation in LP. In this regard, the Hough transform is employed to reduce the rotation effect.
The overall architecture of the LPL is depicted as in Fig. 2, and the details are presented as follows.
2.1. Preprocessing
The preprocessing is mainly used to enhance the processing speed, improve the contrast of the image, and reduce the noise caused by equipments or environments. It is composed by the following three steps.
2.1.1. Searching range reduction
In general, the interested object is placed in the center of a picture when a shot is made. Hence, in this study, the region of interest is fixed at the center 4/9 area as illustrated in Fig.
3.
2.1.2. Histogram equalization enhancement
Many studies adopted conventional contrast stretching to enhance the low contrast images as below.
( ) 255
min max
min ×
−
= −
g g
g g g
f i i , (1) where gi is the input pixel value, and gmax and gmin correspond to the maximum and minimum pixel values, respectively.
However, this method performs poor when an image has low dynamic range. Conversely, the histogram equalization achieves good result for low contrast and dynamic range image. An example for performance comparison is given in Fig. 4, where it is clear that the one processed with the histogram equalization has better contrast than contrast stretching. Notably, the histogram equalization does not require to be applied all the time as indicated in Fig.
2. It is only enabled when there is no candidate object matches to the plate’s property, e.g., texture or aspect ratio.
The processed speed can be improved with this feedback self-learning strategy.
2.1.3. Median filtering
Some images may undergo noise interference. To solve the problem, many filters are possible candidates, e.g., uniform filter, Gaussian filter, median filter, and etc. In this study, the median filter is adopted to remove the noise, since it preserves the most fidelity of an image. The method is described by Eq. 2.
} ) , ( ), , ( { )
,
(x y median f x k y l k l PDR
g = − − ∈ , (2)
where f(⋅) and g(⋅) denote the original image and the corresponding processed result. The variable PDR represents covered region by median filter, e.g., 3x3 or 5x5. In this study, the filter of size 3x3 is employed. The reason behind this is given in Section 2.2.2, where an experiment is given.
Nonetheless, the median filtering still blurs the image a bit.
Hence, this preprocessing is exploited only when there is no candidate object matches to the plate’s property as discussed in Section 2.1.2.
2.2. Localization
In this sub-section, the color information and textures of LP are employed to further locate the exact position.
2.2.1. 3-map retrieving
The LPs in Taiwan are all with the same color distribution, i.e., black characters and white background. In this study, the Saturation map (S-map), Intensity map (I-map), and Edge map (E-map) are employed for CS. Among these, S and I maps are obtained by converting RGB color model to HSI model as
( 3 )[min( , , )]
1 RG B
B G S R
+
− +
= , (3)
( )
3 B G
I= R+ + . (4) The E-map is obtained by applying Sobel edge detection on I-map as described below. The Sobel edge detection is performed with a 3x3 mask, which covers a region as denoted below.
( )
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
H G F
E y x f D
C B A
, , (5) where f( yx, ) stands for the center pixel value and variables A~H represent the peripheral pixels values in this mask. The corresponding reconstructed value is defined as
2
2 _
_ ) ,
(x y H gradient V gradient
E = + , ( 6 )
where H_gradient=C+2E+H-A-2D-F denotes gradient along horizontal orientation and V_gradient=A+2B+C-F-2G-H denotes gradient along vertical orientation. The Sobel operation is known to be insensitive to noises.
2.2.2. Non-LP regions removing
In general, LP has the strongest gradient in E-map. The high-gradient-averaging (HGA) method is applied to remove the non-LP regions by
, ) (
) (
255 0 255
0
∑
∑ ×
=
=
=
i i
i i i
th
E f
E E f E
(7)
, . 0
,
⎩⎨
⎧
≤
= >
th i
th i i
i E E
E E
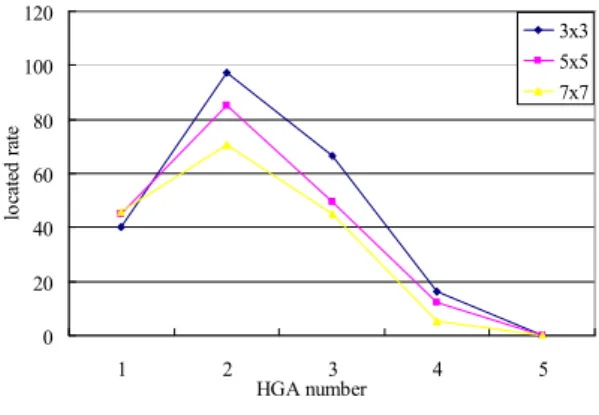
E E (8) The first HGA removes the regions with lower gradients than the average gradient of the E-map. The second HGA further removes the regions with lower gradients than the average gradient of the regions with higher gradients than the average gradient of the original E-map, and so forth. Figure 5 shows the located rates with different number of HGA and median filter size (other parameters are fixed). It is clear that the one with second HGA and median filter of size 3x3 achieves the best result.
The remaining areas in E-map are further filtered according to the texture of the LP as described below.
Each character in LP has 35 possibilities (0~9, A~Z, where the letter O and the number 0 are considered the same). If the LP is scanned with a horizontal line, the number of black to white (or white to black) is at least 6 and at most 14 as shown in Fig. 6. Based on this observation, a horizontal line in E-map is reserved with 6~14 black to white switched numbers. In the same way, a vertical line in E-map is reserved with 1~3 black to white switching numbers. The remaining areas in E-map are then connected with the following method.
Suppose that the distances between each characters of LP are lower than a predefined parameter CD, where the parameter CD is defined as,
20 / ) (widthoftherangereducedimage
CD= . ( 9 )
Two white pixels in the same horizontal line of the E-map with distance lower than CD are connected. Hence, many objects can be obtained with this method. These regions are then filtered according to the aspect ratio and area of the LP as described below.
The aspect ratio of LP is generally around 2.8~4.8. On the other hand, according to our experiments, the extracted LP of size lower than 22x50=1100 pixels is difficult to be recognized. Hence, we reserved the objects meet the aspect ratio and with area higher than 1100 pixels. These reserved objects are named candidate objects.
Each horizontal line of a candidate object is checked if the black to white switched number is between 6~14. The object with highest percentage (more than 80% horizontal lines) with this feature is determined as the LP. Otherwise, the original image is processed with median filter or histogram and the method described in this sub-section is applied again. This method, called feedback self-learning, is an important feature in the proposed algorithm. In this stage, the LP is roughly detected via textures of characters.
3. CHARACTER SEGMENTATION (CS)
In this procedure, the LP is assumed to be located by the methods described above. The CS is followed step by step as introduced below to separate each character in the LP for final recognition.
The procedure of CS can be divided into the following steps: (i) correcting the rotation, (ii) locating the positions of the characters, (iii) separating the characters and background with the proposed hybrid-binarization. The details are given as follows.
3.1. Rotation correction
The performance of CS is mainly influenced by the two factors, rotation and dirt. The rotation problem can be solved with the Hough transform as introduced below, and the dirt problem is solved with the hybrid-binarization as introduced in Section 3.2.
The S and I-maps described above are employed to determine the full region of the LP. First, the located region is expanded by (height of LP)/2 in vertical orientation, and (width of LP)/10 in horizontal orientation in order to ascertain including the edge of LP. Since only black and white two colors are in the LP, the corresponding S-map is with the lowest value compared to other regions. Conversely, the LP in I-map is dominated by white color due to the fact that the background generally has larger area than characters.
The background part can be retrieved from the overlap part around the peak value (±25) of the histogram of S and I-maps. The Sobel operation is then applied again to the background to address the contour of the LP. The pixels in the skeleton of the contour are processed with the Hough transform. Herein, the skeleton is in x-y spatial domain, which has the information of features and positions. The Hough transform result, which associates to a-b domain, is a good observed position for determining the slope of an object. The transformation is conducted with Eq. 10 as below
b ax
y= + , (10) and hence
y xa
b=− + , (11) where the variable a denotes the slope and b denotes the interception. Each point in x-y domain represents a straight line in a-b domain. Since the upper and lower boundaries of the LP are the two longest lines in x-y domain, the two most
overlapped points in a-b domain represent the two longest LP boundaries. The corresponding angles of the two most overlapped points may discrepant slightly to each other.
Hence, more accurate rotation angle of the LP can be determined by the average of the two most overlapped points by the lines in a-b domain. An example is illustrated in Fig. 7, where the center part of 7(a) is the region retrieved by S and I-maps. Figure 7(b) shows the skeleton of background part. The two red circles in Fig. 7(c) indicate the two most overlapped points in a-b domain. The two red lines in Fig. 7(d) are obtained by the two points in a-b domain, and the average slope of the two red lines is used to correct the rotation problem. The corrected result is shown in Fig.
7(e). The corrected LP is then normalized to 60x150 for further binarization processing.
3.2. Hybrid-binarization technique
The dirt generally causes the fail in binarization, object connection, or in determining the size of an object.
Sometimes the dirt has similar properties as the characters in LP. The global binarization (threshold with the average value) performs poor in these cases as shown in Fig. 10(f).
For this, the hybrid-binarization method is proposed as introduced below, and the architecture of the hybrid-binarization method is depicted in Fig. 8.
The average value of the LP is calculated and defined as
IL IW
gi gi f GM i
×
×
=∑
= 255
0 1
)
( . (12)
The histogram peak on the left hand side of GM1 is noted as GLmax, and the peak on the right hand side of GM1 is noted as GHmax. The first valley on the right hand side of
max
GL is noted as GLmin, and the first valley on the left hand side of GHmax is noted as GHmin. The average value of
min
GL and GHmin is noted as GM2, which is the new threshold. An example is demonstrated in Fig. 9. The binarized result processed with GM2 is shown in Fig. 10(g).
The reason behind using GM2 as the new threshold is to solve the problems of dark background or light characters.
However, the dirt may appear in some local regions. Hence, we further refine the method described above to address the local dirt problem as introduced below.
The obtained result processed with the method described above is divided into non-overlapped blocks of size 10x10, which is proven to be with the best segmented rate as shown in Fig. 11. The average of a block is noted as
3
GM . The average of the pixels with values lower than GM3 is noted as Lavg, and the average of the pixels with values higher than GM3 is noted as Havg. The new threshold is defined as
( )
/24 avg avg
M H L
G = + . (13) Then we check if GM3=GM4, if yes, then GM4 is the new threshold for binarizing the block; otherwise, the above procedure described in this paragraph is repeated. The binarized result is shown in Fig. 10(h). The local dirt is removed as desired. However, the block-wise method is too sensitive, which leads to scattered result. Hence, the following hybrid-binarization method is proposed to solve the problem.
The LP has been normalized to 60x150 after rotation correction procedure. The LP processed with the proposed method described above is further scanned from top to
bottom with a horizontal line of length 22 pixels, where the number 22 represents (width of LP)/7. If no white pixel is within the horizontal line, the corresponding pixels in the LP processed with the global threshold, as shown in Fig. 10(f), are reset to black (background). By doing this, each character can be separated from the top and bottom noises.
The same procedure is applied to segment each character.
The LP is scanned from left to right with a vertical line of length 20 pixels, where the number 20 represents (height of LP)/3. If no white pixel is within the vertical line, the corresponding pixels in the LP processed with global threshold are reset to black (background).
The segmented results are shown in Fig. 10(i).
However, some cases, as shown in Fig. 10(c), with serious dirt cannot be segmented with the proposed method.
Nonetheless, the chance of occurring these cases is relatively low compares to the normal cases, since they will be exhorted by polices.
4. EXPERIMENTAL RESULTS
In this study, the CPU with Intel Pentium 4 3.2GHz and 512 MB memory are employed for the performance test. The test images include 332 different images of size 867x623. The distances between camera and cars are between two to five meters. The indoor and outdoor environments are both included, and the images were captured in the morning, afternoon, and night as compiling in Fig. 12.
In general, the located rate and segmented rate performs the best in the morning, while the worst at night as shown in Table I. The overall located rate and segmented rate are 97.1% and 96.4%, respectively.
The performance comparisons with various methods are shown in Table II. The proposed method is only inferior to the method [9]. Nonetheless, the method in [9] fails when the edge of LP is blur or unclear. Moreover, it also fails when two vertical edges beyond the LP occur at the same time.
Finally, the complexity of the proposed system is organized in Table III in terms of the addition (subtraction) and multiplication (division) operations. Some variables are defined as below:
IW: The height of the original image.
IL: The width of the original image.
SW: Reduced height (2×IW/3) as indicated in Fig. 3.
SL: Reduced width (2×IL/3) as indicated in Fig. 3.
AW: Height in a-b domain.
AL: Width in a-b domain.
PW: Normalized height of the LP.
PL: Normalized width of the LP.
CW: Height of a character.
CL: Width of a character.
Num. of Obj. : Object number after object connection.
Taking HSI model conversion procedure as an example:
According to Eq. 3, two additions, one subtraction, one multiplication, and one division are involved to achieve one pixel in the S-map. In Eq. 4, two additions and one division are involved to achieve one pixel in the I-map. Since the image is reduced in its size after the search range reducing procedure, the overall operations include SW × SL × 5 additions (subtractions) and SW × SL × 3 multiplications (divisions) to obtain S-map and I-map. The operation numbers of other procedures can be derived likewise.
Moreover, the average execution time of LPL and CS using the test images described above are listed in Table III as well.
5. CONCLUSIONS
The proliferate applications using image processing or pattern recognition in LPRS, e.g., automatic charging system in parking spaces, vehicles management, and monitoring in traffic, have driven this research topic more and more popular.
The LPL and CS are the two main issues addressed in this study, since they play key roles in LPRS. In this study, the histogram equalization is employed to solve the low contrast and dynamic range problems. The textures, aspect ratio, and color information are adopted to locate the LP.
Moreover, the feedback self-learning strategy is applied to enhance the localized rate. In CS, the Hough transform is applied to correct the rotation problem. The proposed hybrid-binarization method is then employed to reduce the annoying problem caused by dirt. As documented in experiments, the proposed methods achieve good located and segmented rates.
Since the feedback self-learning scheme is adopted in this system. The complexity is relatively high. Hence, the complexity reduction and character recognition are left for future study.
6. REFERENCES
[1] Y. A. Syed and M. Sarfraz, ”Color edge enhancement based fuzzy segmentation of license plates,” IEEE Proceedings of the Ninth International Conference on Information Visualisation (IV’05), 2005.
[2] M. Sarfraz, M. J. Ahmed, and S. A. Ghazi, ”Saudi Arabian license plate recognition system,” IEEE Proceedings of the 2003 International Conference on Geometric Modeling and Graphics (GMAG’03), 2003.
[3] S. Wesolkowski and E. Jernigan, “Color edge detection using jointly euclidean and vector angle,” Vision Interface, pp. 19-21, May, 1999.
[4] C. T. Hsieh, Y. S. Juan, K. M. Hung, ” Multiple license plate detection for complex background,” IEEE Proceedings of the 19th International Conference on Advanced Information Networking and Applications (AINA’05), 2005.
[5] S. L. Chang, L. S. Chen, Y. C. Chung, and S. W. Chen, ” Automatic license plate recognition,” IEEE Trans. Intelligent Transportation Systems, vol. 5, no. 1, 2004.
[6] W. Jia, H. Zhang, and Xiangjian He, ”Mean shift for accurate number plate detection,” IEEE Proceedings of the Third International Conference on Information Technology and applications (ICITA’05), 2005.
[7] A.R., Smith, Tint Fill, Computer Graphics, vol. 13, no. 2, pp. 276-283, 1979.
[8] C. Wu, L. C. On, C. H. Weng, T. S. Kuan, and K. Ng, ” A macao license plate recognition system,” IEEE Proceedings of the Fourth International Conference on Machine Learning and Cybernetics, Guangzhou, 4506-4510, 2005.
[9] M., Yu, and Y.D. Kim, ”An approach to Korean license plate recognition based on vertical edge matching”, IEEE Inremotional Conference on Systems, Man, and‘ Cybernerics, vol. 4, 2000. pp.
2975-2980,
[10] T. H. Wang, F. C. Ni, K. T. Li, Y. P. Chen, ”Robust license plate recognition based on dynamic projection warping”, Proceedings of the 2004 IEEE International Conference on Networkmp. Sensing & Control, pp. 284-288, 2004.
[11] Y. Q. Yang, J. Bai, R. L. Tian, and N. Liu, ” A vehicle license plate recognition system based on fixed color collocation,” IEEE Proceedings of the Fourth International Conference on Machine Learning and Cybernetics, Guangzhou, pp.5394-5397, 2005.
[12] M J. Ahmed, M Sarfaz, A. Zidouri, and K G. AI-Khatib, ”License plate recognition system,” IEEE ICECS, pp. 898-901, 2003.
[13] W. K. Pratt, Digital image processing, Willey, 1991.
(a) (b) Fig. 1. The character configurations of the LP in Taiwan.
Fig. 2. Architecture of plate localization.
Fig. 3. Search range reduction.
(a)
0 2000 4000 6000 8000 10000 12000
1 51 101 151 201 251
(b)
(c)
0 2000 4000 6000 8000 10000
1 51 101 151 201 251
(d)
(e)
0 1000 2000 3000 4000
1 51 101 151 201 251
(f)
Fig. 4. Performance comparisons between contrast stretching and histogram equalization. (a) Original image. (b) Histogram of (a). (c) Contrast stretching result of (a). (d) Histogram of (c). (e) Histogram equalization result of (a). (f) Histogram of (e).
0 20 40 60 80 100 120
1 2 3 4 5
HGA number
located rate
3x3 5x5 7x7
Fig. 5. Located rate vs. HGA number and median filter size.
(a) (b) Fig. 6. Example of characters crossed by a horizontal line. (a) 6 black to white switched number. (b) 14 black to white switched number.
(a) (b)
(c) (d)
(e)
Fig. 7. Rotation correction with Hough transform. (a) Image matched SI map (b) Skeleton of Sobel edge. (c) x-y to a-b. (d) a-b to x-y. (e) corrected result.
Color image
Search range reducing
Color histogram
HSI model conversion
Non-plate region filtering
Determination of candidate regions Median filter
Output plate image Edge detection
Features match?
Preprocessing
Localization 3-map retrieving
Poor contrast?
Yes
No
Yes No
No candidate
Fig. 8. Architecture of the hybrid-binarization method.
GM2
GHmin
GHmax
GLmin
GLmax
GM1
Fig. 9. Smooth processed graylevel histogram.
(a) (b) (c) (d)
(e)
(f)
(g)
(h)
(i)
Fig. 10. Hybrid-binarization method. (a) Normal LP. (b) Dirt similar to white background. (c) Serious dirt. (d) Located plates. (e) Histogram after low pass filtering. ◆: old threshold, ▲: new threshold. (f) Binarized results with the old threshold. (g) Binarized results with the new threshold. (h) Binarized results with 10x10 block. (i) Binarized results with hybrid-binarization method.
75 80 85 90 95 100
5 6 7 8 9 10 11 12 13 14 15
Block size
Segmented rate
Fig. 11. Block size optimization.
Fig. 12. Percentages of photo taking time.
TABLE I. LOCATED AND SEGMENTED RATES.
AM PM night Rates
(%)
Overall rates (%) LPL
(sample #) 97.96
(182) 96.59
(108) 94.48
(42) 97.1 97.1
(LPL) CS
(sample #)
98.25 (171)
95 (100)
92.11
(38) 96.4 93.6
(LPL+CS) TABLE II. COMPARISONS OF VARIOUS METHODS [Reference] Advantages (+), special applications (+), and Shortcomings (-)
[2] + High efficiency
- Vulnerable to complex environment and rotation.
[4] + Good to withstand the variation of the lighting, contrast, rotation, and is also capable of locating multiple plates.
- High complexity [8] + High efficiency
- Vulnerable to complex environment and lighting [9] + High efficiency and good tolerance to rotation
- Vulnerable to complex environment [11] + Good localization result
- Vulnerable to low contrast or poor color [12] + High efficiency
- Vulnerable to complex environment and rotation.
Proposed + Good tolerance to complex environment, rotation, lighting, and low contrast
- High complexity
TABLE III. COMPLEXITY ANALYSES OF LPL AND CS.
License Plate Localization
Procedures
Search range reducing
(−)
+ 0
(÷)
× 0
Color histogram +(−) SW×SL×6+255
(÷)
× SW×SL+255×3
Median filter +(−) 0
(÷)
× 0
HSI model conversion
(−)
+ SW×SL×5
(÷)
× SW×SL×3
Edge detection +(−) SW×SL×13
(÷)
× SW×SL×4+2
Non-plane region filtering
(−)
+ SW×(SL-PL) ×3+(SW-PW) ×SL×3+
Num. of Obj.×SW×SL
(÷)
× 0
Hough transform
(−)
+ PW×PL×21+2×PW×PL×AW×AL+
AW×AL×2+SW×SL×20
(÷)
× PW×PL×4+2×PW×PL×AW×AL+
4+SW×SL×36 Average execution
time 0.532 seconds
(a) Initial threshold
2
GM
Average binarization
Combine Setting initial
threshold
=0 gi
Searching new threshold
4
GM
License plate
2 M
i G
g <
4 M
i G
g <
Output
In 10*10 Block
No
No Yes
Yes
Character Segmentation
Procedures
Normal binarization
(−)
+ 0
(÷)
× 0
Find the boundaries
(−)
+ PW×PL×4+PL×2
(÷)
× 0
Hybrid-binarizatio n
(−)
+ PW×PL×3+4+PW×PL×10×10×3
(÷)
× PW×PL×3+2
Object connection conversion
(−)
+ PW×PL×4+Num. of Obj.×PW×PL
(÷)
× 0
Non-character filtering
(−)
+ Num. of Obj.×2
(÷)
× 0
Character segmentation
(−)
+ Num. of Obj.×8+PW
(÷)
× Num. of Obj.×8 Average execution
time 0.062 seconds
(b)
計畫成果自評部份:
本「智慧校園之發展」之計畫原本為一整合型計畫,旨在配合國家數位服務科技的重點 發展領域,建立一個可以提供學校師生高品質生活環境的智慧校園(Smart Campus)。計 畫強調「智慧安全的校園環境」與「自在學習的校園環境」的建立,並特別重視肢障師 生的智慧化校園生活服務。但由於國科會預算問題,六個子計畫僅通過本子計畫,而本 計畫原本著重在透過車牌辨識的發展達成支援其他子計畫在停車場空車位偵側、以及建 立車位與車輛(主)關係等技術。雖然其餘子計畫未能過關,但本子計畫仍達成計畫所 規範之進度,包含如下:
利用遞迴式自我學習程序及混成式二值化技術達成車牌定位及字元切割之高成功率,技 術裏結合色階調諧法,外觀比判斷及霍夫轉換,以解決影像中之對比問題、拍攝之旋轉 問題及車牌髒污問題,經過實驗證明,本技術之成功率可超越國際上許多現有的技術。
本技術已獲得國際 SCI 期刊 IEEE Transactions on Vehicular Technology 接受 (Impact factor: 0.86, Ranking: 86/208),預訂於 2008 年 3 月可被刊出。
出席國際學術會議心得報告
計畫編號 NSC 95-2221-E-011-218
計畫名稱 智慧校園監控系統 出國人員姓名
服務機關及職稱
郭景明
國立台灣科技大學電機系助理教授
會議時間地點 2006 年 10 月 8~11 日,地點:美國亞特蘭大 會議名稱 IEEE International Conference of Image Processing
發表論文題目
1. J. M. Guo, “A complete printer model in error-diffused halftoning,” IEEE International Conference on Image Processing, GA, U.S.A. Oct. 2006.
2. J. M. Guo and J. H. Chen, “High Efficiency Digital Halftoning with Two-Element Error Kernel,” IEEE International Conference on Image Processing, GA, U.S.A. Oct. 2006.
一、參加會議經過
IEEE ICIP 研討會為國際上影像處理方面最大的交流技術平台,本次參加研究討除了 參與本身發表論文的場次外,也參加了許多其他個人有興趣的主題,除了吸收最新發展 技術外,也結識許多國際上知名的學者,對於未來的國際合作奠立了基礎,並且也藉由 參與本研討會讓國際上的學者瞭解台灣在這方面的技術發展,也間接提升少許的國際知 名度。
二、與會心得
本次參與IEEE ICIP 研討會發現會議在本主題上多了許多 sessions, 裏面不乏有些人 所帶領的團隊在這個領域已有多年的經驗,而且也有相當不錯的成果,本人也與這些學 者有技術上的交流,但關鍵的技術問題,仍有待回國後慢慢消化。大體而言,這次的研 討會參與相當重要,不僅瞭解國際上的學者在這個議題上的態度與發展,也得到了不少 新的啟發。
本次個人所發表之論文摘要分別如下:
1. J. M. Guo, “A complete printer model in error-diffused halftoning,” IEEE International Conference on Image Processing, GA, U.S.A. Oct. 2006.
Generally speaking, the researches in model-based halftoning can be divided into error-diffusion based and iteration based methods. In this study, we propose a modified printer model to eliminate the damage from dot gain effect in printed halftone images. The proposed printer model cooperates with error diffusion and totally solves the dot gain problem in just one processing pass for all kinds of printed dot radii. Moreover, the modified printed image inherently needs fewer printed dots than the image obtained by traditional halftone method. With this modified printer model, it also offers an additional benefit
of saving the cartridge expenditure. As documented in the experimental results, the average cartridge saving is around 38.58% with nature images.
2. J. M. Guo and J. H. Chen, “High Efficiency Digital Halftoning with Two-Element Error Kernel,”
IEEE International Conference on Image Processing, GA, U.S.A. Oct. 2006.
A high efficiency and good quality error-diffused halftoning is proposed in this paper. An objective halftone image quality evaluation method based on human visual system obtained by Least-Mean-Square is also introduced. The error diffusion algorithm, first introduced by Floyd and Steinberg in 1975, is currently the most popular method of digital halftoning.
However, some annoying shortcomings, such as patches of regular textures, worm effect, and computational complexity still need to be improved. Ostromoukhov proposed a three-element error diffusion solving the problems described above, and achieved excellent performance. In this paper, we further reduced the complexity with the proposed two-element error diffusion by cooperating with the proposed LMS-trained quality evaluation. As demonstrated in experiments, the proposed technique further reduced the complexity by 33% compared to Ostromoukhov’s method, and it is still comparable in image quality.