國
立
交
通
大
學
應用數學學系
碩 士 論 文
橢圓介面方程的數值研究
Numerical Study of Elliptic Interface Problems
研 究 生:胡偉帆
指導教授:賴明治 教授
橢圓介面方程的數值研究
Numerical Study of Elliptic Interface Problems
研 究 生:胡偉帆 Student:Wei-Fan Hu
指導教授:賴明治 Advisor:
Ming-Chih Lai
國 立 交 通 大 學
應 用 數 學 系
碩 士 論 文
A Thesis
Submitted to Department of Department of Applied Mathematics College of Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Applied Mathematics July 2008
橢圓介面方程的數值研究
學生:胡偉帆 指導教授:賴明治
國立交通大學應用數學系(研究所)碩士班
摘要
本文利用新的任意高階精度內嵌介面方法計算橢圓界面方程,並且應用
至有介面的熱方程問題,我們推導出四階精度公式和測試數值結果。本方法
的優點是容易應用於其他問題並且使數值精確度有顯著的改善。
Numerical Study of Elliptic Interface Problems
Student: Wei-Fan Hu Advisor: Ming-Chih Lai
Department (Institute) of Applied Mathematics
National Chiao Tung University
Abstract
In this thesis, we introduce an arbitrary high-order immersed interface method for
solving elliptic equations and apply it to solve heat equation with interface. We
have derived fourth-order scheme and tested in examples. The advantage of
method in this thesis is easy to apply to other problems, such as two-phase flow
and leads to a significant improvement in accuracy.
誌 謝
本篇論文的完成,首先要感謝我的指導老師-賴明治教授。在老師指點下,讓我逐
漸熟悉了數值偏微分方程以及科學計算的方法。使我在數值方法與科學計算這片領中,
找到我的興趣已經研究做出的成就感。老師不只引導我學習應有的態度,並且也教導我
們做人的道理,相信在往後的人生的道路上將會受用無窮。除了指導老師外,科學計算
研究室的其他學長們也給我不少助力。感謝曾昱豪學長與曾孝捷學長,在我剛進入這片
領域時給我引導,教導我許多研究上的知識。感謝陳冠羽學長,總是耐心地回答我各式
各樣的疑難雜症,讓我在課業上以及生活上有極大的幫助。
在口試論文期間,承蒙黃聰明教授、王偉仲教授與吳金典助理教授費心審閱並提供
許多寶貴意見,使得本論文更加完備,學生永銘記在心。
除了研究外,我也要感謝其他同屆的同學們,除了課業上的討論外,閒暇之餘能與
他們閒話家常,一起運動,交換各種心得,讓我的研究生生活充滿樂趣。
最後,我要感謝我的家人,沒有他們的鼓勵與支持,我無法順利地完成學業。願與
他們,以及所有在我周圍關心我的人,一同分享此篇論文完成之喜悅與榮耀。
目 錄
2 )中文提要
………
i
英文提要
………
ii
誌謝
………
iii
目錄
………
iv
一、
Introduction………
1
二、
Basic Definition ………
2
2.1
Cartesian Grid………
2
2.2
Jump Conditions ………
3
2.2.1 One dimension ………
3
2.2.2 Two dimensions………
3
2.3
Level Set Function………
4
三、
One-Dimensional Elliptic Interface Problems ………
4
3.1
Difference Formulas for
2at Irregular Points ……
d u/ dx5
3.1.1 Difference Formulas with Four-point Stencil
(n= =m 2…
6
3.1.2 Irregular Point Located at Right Side of Interface ………
8
3.2
Difference Formulas with a General
n+mGrid Stencil…
10
3.3
Numerical Results………
12
四、
Two-Dimensional Elliptic Interface Problems………
14
4.1
Poisson Equation with Interface ………
15
4.2
Elliptic Equation with Interface ………
16
4.3
Numerical Results………
17
4.3.1 Poisson Equation ………
17
4.3.2 Elliptic Equation ………
20
4.3.3 Application of Heat Equation ………
22
五、
Conclusion………
24
1
Introduction
In this thesis, we propose a numerical method for solving elliptic equation with interface in the following
∇ · (β∇u) − κ(x)u(x) = f (x).
The equation is defined in a simple region with a uniform Cartesian grid and the coefficient β and κ can be discontinuous across interface. From this equation, we can derive two jump conditions:
[u] and [βun].
We will use these two natural jump conditions as known in our method. In solving problems with interface, since the derivative terms may have jump discontinuities, we cannot use finite difference directly. One intuitional way is that use one-sided difference formula at grid points near the interface, but it will lead the linear system insolvable because of the singularity of the matrix. The Immersed Interface Method (IIM) has been developed as a sharp interface method which can accurately capture discontinuities in the solution.
The first IIM paper was developed by Leveque and Li[3]. The original IIM uses three points to discrete the derivative term in equation to maintain the compact structure of matrix. In this thesis we use four points to reduce the complex work in original IIM. Mayo used the similar idea earlier in [9] on the fast solution of the Poisson and biharmonic equations. There are also lots of treatments for the immersed interface problems[2, 4, 5, 6, 7, 8].
The term “immersed interface” has been used since the method is mo-tivated by Peskin’s “immersed boundary method” (IBM). The equation is discretized by a standard finite difference method in a fixed Cartesian grid and the singular delta function is substituted by an approximated smooth function spanning a few grid cells. But this method is of first-order accuracy. First of all, We give some basic definition and useful tools in Sec. 2 and secondly we introduce the singularity into a finite difference scheme in Sec. 3. Finally, we test some examples to show our work in Sec. 4.
2
Basic Definition
2.1
Cartesian Grid
We usually assume that the domain Ω is a rectangle for interface problems. For example, Ω = [a, b] in one-dimensional case, Ω = [a, b] × [c, d] in two-dimensional case, and Ω = [a, b] × [c, d] × [r, s] in three-two-dimensional case. The Cartesian grid can be represented by
xi = a + ihx, for i = 0, 1, · · · , M , where hx = b − a M ; yj = c + jhy, for j = 0, 1, · · · , N , where hy = d − c N ; zk = r + khz, for k = 0, 1, · · · , L, where hz = s − r L .
For simplicity, we often set hx = hy = hz = h.
We use the notation Γ to denote the interface which divides the domain
Ω into two parts , Ω− and Ω+(Fig. 1).
Ω− Ω+ Γ X Y −1 −0.5 0 0.5 1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
2.2
Jump Conditions
2.2.1 One Dimension
Given a piecewise smooth function u(x) that can have the finite jump across interface. We give a notation defined as following:
u±(α) = lim
ε→0+u(α ± ε). (1) The jump condition at x = α in x-direction is defined by
[u(α)]x = u+(α) − u−(α). (2)
For simplicity, we often omit that u±(α) = u± and use the notation [u] to
define the jump condition across interface. The subscript of [ ]x may be little
strange but it will be useful in extension to two dimensions.
2.2.2 Two Dimensions
Given a point X = (X, Y ) on the interface Γ. The limiting values of u(X)
and un(X) are defined as
u±(X) = lim ε→0+u(X ± εn), (3) u±n(X) = ∂u ∂n ± (X) = ∇u±(X) · n, (4)
where n = (n1, n2) is the outward unit normal vector. Then the jump
con-ditions on interface are defined as
[u] = u+− u− and [u
n] = u+n − u−n. (5)
We should be able to figure out “+” and “−” sides without confusion. It’s
also useful to define [ ]x, the jump in x-direction and [ ]y, the jump in
y-direction as
[u]x = u(X+, Y ) − u(X−, Y ) and [u]y = u(X, Y+) − u(X, Y−). (6)
From (5) and (6), we can easily obtain
[u]x = sgn(n1)[u] and [u]y = sgn(n2)[u]. (7)
2.3
Level Set Function
In this approach, an interface is represented by the zero level set of function
φ. The following is the definition of φ on whole domain: φ(x) < 0 if x ∈ Ω−
φ(x) = 0 if x ∈ Γ φ(x) > 0 if x ∈ Ω+
We call φ is a signed distance function if φ(x) is the distance from x to the interface. We will use re-initialization process[10] to modified level set function into signed distance function so that use φ to define the outward unit normal vector n by
n = ∇φ
|∇φ|, (8)
and the curvature κ by
κ = ∇ · n = ∇ · µ ∇φ |∇φ| ¶ . (9) If X is on the interface but is not a grid point, we can still compute them by the interpolation method using specific points from the four corners of the rectangle that contains X.
3
One-Dimensional Elliptic Interface
Prob-lems
In this section, we discuss with one-dimensional elliptic equation. Extending to two-dimensional elliptic equations is using dimension by dimension. The key idea of IIM is to avoid grid generation by correcting finite difference in the neighborhood of the interface. We only show the work about discrete form of (d2u/dx2)
j. The discrete form of (du/dx)j can be easily obtained by
the same way.
Assume the interface is located at x = α(Fig. 2). Let
σ = α − xj
h . (10)
Figure 2: Uniform grid with interface located at x = α
The two jump conditions involving u and ux can be obtained from the
original elliptic equation. A general jump conditions across the interface can be written as [γu]x = γ+u+− γ−u−= A (11) and · βdu dx ¸ x = β+du dx + − β−du dx − = B. (12)
As mention in Sec. 2.2, the superscripts “+” and “−” represent the variables at the right and left side of the interface, respectively.
There are two kinds of grid points. One is called a regular point if the finite difference formula at this point only involves grid points on the same side of the interface. Otherwise, it is an irregular point. If the gird point i is a regular point, we use standard finite difference directly. For example:
µ d2u dx2 ¶ j = uj−1− 2uj + uj+1 h2 + O(h 2) (13) or µ d2u dx2 ¶ j
= −uj−2+ 16uj−1− 30uj + 16uj+1− uj+2
12h2 + O(h
4). (14)
These two difference formulas can be easily obtained by the Taylor expansion.
3.1
Difference Formula for d
2u/dx
2at Irregular Points
Finite difference approximations for d2u/dx2 at the irregular point j are
considered by using a stencil of n points on the left side of interface and m points on the right(Fig. 2).
3.1.1 Difference Formulas with Four-point Stencil (n = m = 2) In this section, we discuss the case n = m = 2. Let
µ d2u dx2 ¶ j ≈ d−1uj−1+ d0uj+ d1uj+1+ d2uj+2+ dAA + hdBB h2 . (15)
Thus, we have to determine dks and the correction term on the right hand
side of Eq. (15). By using the Taylor expansion at x = α−, we have
u(x) = u(α−) + u 0(α−) 1! (x − α −) + u00(α−) 2! (x − α −)2+ · · · . (16)
Let x = xj−1 in Eq. (16), then we have
uj−1 = u(α−) + u0(α−) 1! (xj−1− α −) + u00(α−) 2! (xj−1− α −)2+ · · · . (17)
Take ε → 0, Eq. (17) becomes
uj−1 = u−− µ du dx ¶− (1 + σ)h + 1 2! µ du dx ¶− (1 + σ)2h2+ · · · . (18) Similarly, uj = u−− µ du dx ¶− σh + 1 2! µ du dx ¶− σ2h2 + · · · , (19) uj+1= u++ µ du dx ¶+ (1 − σ)h + 1 2! µ du dx ¶+ (1 − σ)2h2+ · · · , (20) uj+2= u++ µ du dx ¶+ (2 − σ)h + 1 2! µ du dx ¶+ (2 − σ)2h2+ · · · . (21)
Substituting Eqs. (11) and (12) into Eq. (20) and (21), we have
uj+1 = A γ+ + (1 − σ)hB β+ + cγu −+ c β(1 − σ)h µ du dx ¶− + 1 2!(1 − σ) 2h2 µ d2u dx2 ¶+ + · · · , (22) uj+2 = A γ+ + (2 − σ)hB β+ + cγu −+ c β(2 − σ)h µ du dx ¶− + 1 2!(2 − σ) 2h2 µ d2u dx2 ¶+ + · · · , (23) where cγ = γ− γ+ and cβ = β− β+.
Substituting Eqs. (18), (19), (22), and (23) into Eq. (15) leads to µ d2u dx2 ¶ j = 1 h2 Ã a1u−+ a2 µ du dx ¶− h + a3 µ d2u dx2 ¶− h2+ a 4 µ d2u dx2 ¶+ h2 + a5A + a6Bh + O(h3) ! . (24) Since µ d2u dx2 ¶ j = µ d2u dx2 ¶− + O(h), (25)
we take ai = 0 for i = 1, 2, 4, 5, 6 and a3 = 1. From Eqs. (24) and (25), we
can conclude that the (d2u/dx2) at irregular points is O(h). To determine
dks, it is necessary to solve the linear system equation as follows
1 1 cγ cγ 0 0 −(1 + σ) −σ (1 − σ)cβ (2 − σ)cβ 0 0 (1 + σ)2 σ2 0 0 0 0 0 0 (1 − σ)2 (2 − σ)2 0 0 0 0 1 1 γ+ 0 0 0 (1 − σ) (2 − σ) 0 β+ d1 d0 d1 d2 dA dB = 0 0 2 0 0 0 . Therefore, we get d−1 = 1 D{cγ(3σ − 2σ 2) − c β(−2 + 3σ − σ2)}, d0 = 1 D{cγ(−3 − σ + 2σ 2) − c β(2 − 3σ + σ2)}, d1 = 1 D{4 − 4σ + σ 2}, (26) d2 = 1 D{−1 + 2σ − σ 2}, dA = 1 γ+D{−3 + 2σ}, dB = − 1 β+D{2 − 3σ + σ 2}, where 1 2 3 2 3
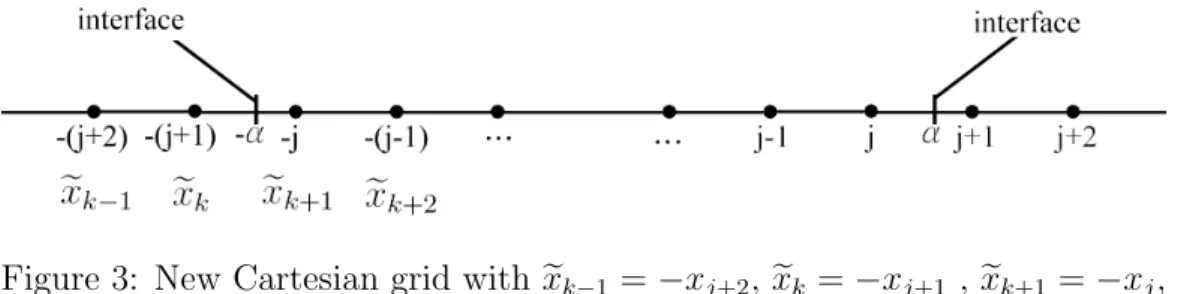
Figure 3: New Cartesian grid with exk−1 = −xj+2, exk = −xj+1 , exk+1 = −xj,
and exk+2 = −xj−1.
Clearly, dks are functions of σ and jump parameters: γ+, β+, cγ, and cβ.
Finally, we’ve determined all dks. Eq. (15), together with Eq. (26), is an
explicit difference formula for O(h) approximation to (d2u/dx2)
j. Moreover,
it shows that the current formula at irregular points does not have singularity, even for the special cases of Γ coinciding with σ = 0 or σ = 1.
We can obtain (du/dx)j by the same way. The general formulas for first
and second derivatives terms are µ du dx ¶ j = (d−1− 2)uj−1+ (d0+ 2)uj+ d1uj+1+ d2uj+2+ dAA + hdBB 2h + O(h), (27) µ d2u dx2 ¶ j = d−1uj−1+ d0uj + d1uj+1+ d2uj+2+ dAA + hdBB h2 + O(h), (28)
where dks are the same in Eq. (26).
3.1.2 Irregular Point Located at Right Side of Interface
The finite difference formulas at grid point j + 1 can be obtained from Eqs. (27) and (28). Instead of using the method in previous section, we use the coordinate transformation (Fig. 3).
Let v(x) = u(−x), e γ(x) = γ(−x), e β(x) = β(−x), (29) [eγv]x = eA, [ eβv0] x = eB,
then the two jump conditions are [eγv]x = lim ε→0+eγ(−α + ε)v(−α + ε) − eγ(−α − ε)v(−α − ε) = lim ε→0+γ(α − ε)u(α − ε) − γ(α + ε)u(α + ε) = γ−u−− γ+u+ = −[γu] = −A and [ eβv0] x= lim ε→0+ e β(−α + ε)v0(−α + ε) − eβ(−α − ε)v0(−α − ε) = lim ε→0+−β(α − ε)u 0(α − ε) + β(α + ε)u0(α + ε) = −β−u0− + β+u0+ = −[βu0] = B.
Consider the derivative of function v defined on the Cartesian grid exk. By
the same thought in Sec. 3.1.1, we can easily obtain µ
d2v
dx2
¶
(exk) =
d−1v(exk−1) + d0v(exk) + d1v(exk+1) + d2v(exk+2) + dAA + hde BBe
h2 + O(h).
(30)
Note that the dks are functions of σ0, where σ0 = 1 − σ and σ is the same as
Eq. (10). Similarly, all dks are functions of parameters: eγ+ and eβ+, where
e
γ+ = γ− and eβ+ = β−. By Eq. (29), we have v00(x) = u00(−x), and then Eq.
(30) becomes µ d2u dx2 ¶ j+1 = d2uj−1+ d1uj+ d0uj+1+ d−1uj+2− dAA + hdBB h2 + O(h). (31) Similarly, we have µ du dx ¶ j+1 = −d2uj−1+ d1uj + (d0+ 2)uj+1+ (d−1− 2)uj+2− dAA + hdBB 2h + O(h). (32)
3.2
Difference Formulas with a General n + m Grid
Stencil
In this section, we want to obtain arbitrary high order difference formula scheme. The difference formulas at irregular point j for n + m points are considered. In order to get uniform order, we often take n = m. The method we used is matched polynomial interpolation. We only provide the discrete
form of d2u/dx2 here.
The polynomial on the left side of Γ, interpolating through n grid points can be written as
P−(x) =
−n+1X
k=0
lk(x)ui+k+ anR(x), (33)
where an is an undetermined coefficient to be decided, and
R(x) =
−n+1Y
k=0
(x − xi+k). (34)
lk(x) is the Lagrange polynomial, i.e.
lk(x) = −n+1Y l=0,l6=k (x − xi+l) . −n+1Y l=0,l6=k (xi+k− xi+l). (35)
Similarly, the polynomial on the right side of Γ, interpolating through m grid points can be written as
P+(x) =
m
X
k=1
rk(x)ui+k+ bmQ(x), (36)
where bm is an undetermined coefficient to be decided, and
Q(x) =
m
Y
k=1
(x − xi+k). (37)
rk(x) is the Lagrange polynomial, i.e.
rk(x) = m Y l=1,l6=k (x − xi+l) . Ym l=1,l6=k (xi+k− xi+l). (38)
Our thought is that use the relation µ d2u dx2 ¶ j ≈ µ d2P−(x) dx2 ¶ x=xj .
Thus, we only have to determine the unknown an. Once we find an, we can
obtain the difference formula (d2u/dx2)
j, and then we get (d2u/dx2)j+1 by
the method in Sec. 3.1.2.
Substituting Eqs. (33) and (36) into Eq. (11) leads to
γ+ ( m X k=1 rk(α)ui+k+ bmQ(α) ) − γ− ( −n+1X k=0 lk(α)ui+k+ anR(α) ) = A. Rearrange the equation above we get
c11an+ c12bm = β1, (39) where c11= −γ−R(α), c12= γ+Q(α), (40) β1 = A − γ+ m X k=1 rk(α)ui+k+ γ− −n+1X k=0 lk(α)ui+k.
Again, Substituting Eqs. (33) and (36) into Eq. (12) leads to
β+ ( m X k=1 r0k(α)ui+k+ bmQ0(α) ) − β− (−n+1 X k=0 l0k(α)ui+k+ anR0(α) ) = B. Rearrange the equation above we get
c21an+ c22bm = β2, (41) where c21 = −β−R0(α), c22 = β+Q0(α), (42) β2 = B − β+ m X k=1 r0 k(α)ui+k+ β− −n+1X k=0 l0 k(α)ui+k.
Solving Eqs. (39) and (41), we have
an= m
X
where µk= ½ 1 J{γ−β+Q0(α)lk(α) − γ+β−Q(α)l0k(α)} for k = −n + 1, · · · , 0 γ+β+ J {−Q0(α)rk(α) + Q(α)r0k(α)} for k = 1, · · · , m, ξ− A = 1 J{β +Q0(α)}, (44) ξ− B = − 1 J{γ +Q(α)}, J = γ+β−R0(α)Q(α) − γ−β+Q0(α)R(α).
In fact, if we take n = m = 2, we will have the same result as present in the previous section.
3.3
Numerical Results
We use four versions of current IIM tested in this thesis. In method C and D, grid points j − 1 and j + 2 are irregular points, but we can treat only j and
j + 1 as irregular points and use fourth-order one-sided difference formula for j − 1 and j + 2.
Methods Order at regular Order at irregular Expected global order
grid points grid points
Method A O(h2) O(h) O(h2)
Method B O(h2) O(h2) O(h2)
Method C O(h4) O(h) O(h2)
Method D O(h4) O(h2) O(h3)
Table 1: Four immersed interface method
Example 3.1 In this example, we use the IIM to solve the following prob-lem:
d2u
dx2 + κu = βδ(x − α) , x ∈ (−0.5, 0.5), (45)
where κ is discontinuous across the interface located at x = α:
κ(x) =
½
(α1)2 if − 0.5 < x ≤ α,
The boundary condition is
u(−0.5) = u(0.5) = 0. (47) An alternative way to state Eq. (45) requires that u(x) satisfies the equation
d2u
dx2 + κu = 0 , x ∈ (−0.5, α) ∪ (α, 0.5), (48)
excluding the interface located at x = α, together with boundary conditions (47) and two natural jump conditions:
[u]x = 0, (49) · du dx ¸ x = β. (50)
The exact solution is
uex(x) = β cos(α2α) cos(α1x)
α1cos(α2α) sin(α1α) − α2sin(α2α) cos(α1α) if − 0.5 < x ≤ α,
β cos(α1α) cos(α2x)
α1cos(α2α) sin(α1α) − α2sin(α2α) cos(α1α) if α < x < 0.5.
(51)
Take α = 4/15, β = −40π, α1 = 7π, and α2 = 5π. The jump parameters
are: γ+= β+= c γ = cβ = 1, A = 0, and B = β. −0.5 0 0.5 −8 −6 −4 −2 0 2 4 X Y (a) (b) u ex u −0.5 0 0.5 −3 −2 −1 0 1 2x 10 −5
Figure 4: (a)Comparison of the exact solution uexand the numerical solution
Table 2 shows the maximum-norm errors of four methods, the correspond-ing ratios and orders. Note that in order to compare the grid refinement results with the same conditions, all results are compared between grids N and N/4 because they have the same σ. So the ratio and order are defined as following: Ratio = kEN/4k∞ kENk∞ , Order = log4 µ kEN/4k∞ kENk∞ ¶ . N σ Method A Method B
kEnk∞ Ratio Order kEnk∞ Ratio Order
20 1/3 9.795371 9.884993 40 2/3 9.537e-1 9.369e-1 80 1/3 2.135e-1 45.875 2.76 2.135e-1 46.79 2.77 160 2/3 5.277e-2 18.073 2.09 5.189e-2 18.05 2.08 320 1/3 1.297e-2 16.466 2.02 1.288e-2 16.39 2.01 640 2/3 3.275e-3 16.112 2.00 3.222e-3 16.10 2.00 N σ Method C Method D
kEnk∞ Ratio Order kEnk∞ Ratio Order
40 2/3 3.673e-1 3.762e-1
80 1/3 1.269e-2 8.797e-3
160 2/3 2.709e-3 135.5 3.54 1.016e-3 369.9 4.27
320 1/3 2.198e-4 57.72 2.92 2.521e-5 348.9 4.22
640 2/3 1.255e-4 21.57 2.21 1.112e-5 91.44 3.26
Table 2: Comparison of numerical errors
4
Two-Dimensional Elliptic Interface
Prob-lems
We use a dimension by dimension approach to solve the two-dimensional problems. To compute two-dimensional problems, the grid points are classi-fied into four categories in x-direction:
1. Regular point;
2. Irregular point located on left side of interface; 3. Irregular point located on right side of interface; 4. Irregular point near two interface.
The definition in y-direction is similar to x-direction.
For regular point away from the interface, the derivatives with respect to
x and y are approximated by standard central difference:
µ d2u dx2 ¶ i,j =
ui−1,j − 2ui,j+ ui+1,j
h2 + O(h2)
−ui−2,j + 16ui−1,j − 30ui,j + 16ui+1,j− ui+2,j
12h2 + O(h4) (52) µ d2u dy2 ¶ i,j =
ui,j−1− 2ui,j+ ui,j+1
h2 + O(h2)
−ui,j−2+ 16ui,j−1− 30ui,j + 16ui,j+1− ui,j+2
12h2 + O(h4)
(53)
Remember that in 1D problems, we need two jump conditions: [γu]x and
[βux]x. But we can’t get these two necessary jump conditions from original
equation directly, so we still have to make some effort to get these two jump conditions.
4.1
Poisson Equation with Interface
There are two natural jump conditions we can get from original poisson equation: [u] = w(s), (54) · ∂u ∂n ¸ = v(s), (55)
where s is a parameter of the interface. From Eq. (54), we obtain ·
∂u ∂s
¸
Assume that n = (n1, n2) is the unit normal vector on Γ. Thus s = (−n2, n1)
is the unit tangential vector on Γ. Hence, Eqs. (55) and (56) lead to:
[−n2ux+ n1uy] = w0(s), (57)
[n1ux+ n2uy] = v(s). (58)
By the definition, we have
−n2[ux] + n1[uy] = w0(s), (59)
n1[ux] + n2[uy] = v(s). (60)
Rearrange Eqs. (59) and (60) we have:
[ux] = n1v(s) − n2w0(s), (61)
[uy] = n2v(s) + n1w0(s). (62)
Since v(s) and w0(s) are known, we only have to calculate two unknowns, n
1
and n2, by level set method.
Note that all jump conditions for partial derivative of u are NOT in x or
y-direction. So we have to use Eq. (7) to derive jump conditions for partial
derivative in x or y-directions.
4.2
Elliptic Equation with Interface
The natural jump conditions for elliptic equation are
[u] = w(s), (63) · β∂u ∂n ¸ = v(s). (64)
Again, form Eq. (63) we have ·
β∂u ∂s
¸
= w0(s). (65)
By the same thought in Sec. 4.1, we have £ (βn2 1 + n22)ux ¤ = n1v(s) − n2w0(s) − [(β − 1)n1n2uy], (66) £ (n2 1+ βn22)uy ¤ = n1w0(s) − n2v(s) − [(β − 1)n1n2ux]. (67)
For finite difference approximation of x derivatives at an irregular point, the jump condition (66) is used. So we have to decide the y derivative term
on the right hand side of Eq.(66). We evaluate [uy] by one-sided difference
at an order of accuracy which is consistent with the order of the overall calculations.
4.3
Numerical Results
4.3.1 Poisson Equation
Example 4.1 We use the example, which was used by Leveque and Li[3] to test IIM in this thesis.
uxx+ uyy =
Z
Γ
2δ(x − X(s))(y − Y (s))ds − 1 < x, y < 1, (68)
where the interface Γ is a circle defined by x2+y2 = 1/4. We can easily obtain
unit normal vector n = (2x, 2y) where (x, y) ∈ Γ. The Dirichlet boundary condition is specified by using the exact solution:
uex(x, y) =
(
1 if px2+ y2 ≤ 1/2,
1 + log(2px2+ y2) if px2+ y2 > 1/2. (69)
The jump conditions at all points on Γ are
[u] = 0, (70) · ∂u ∂n ¸ = 2. (71) By Sec. 4.1, we have [ux] = 4x, (72) [uy] = 4y, (73)
where (x, y) is on the interface Γ. We also test delta function method in this example. Assume f has a delta function singularity along the interface Γ by discrete delta function. For example:
f (x, y) =
Z
Γ
C(s)δ(x − X(s))δ(y − Y (s))ds, (74) where (X(s), Y (s)) is the arc-length parameterization of Γ. We use the dis-crete delta function
dh(x) = ( 1 4h ¡ 1 + cos¡πx 2h ¢¢ if |x| < 2h, 0 if |x| ≥ 2h, (75)
to calculate fi,j, and the form of which is
fi,j = m
X
k=1
C(sk)dh(xi− Xk)dh(yj− Yj)∆sk. (76)
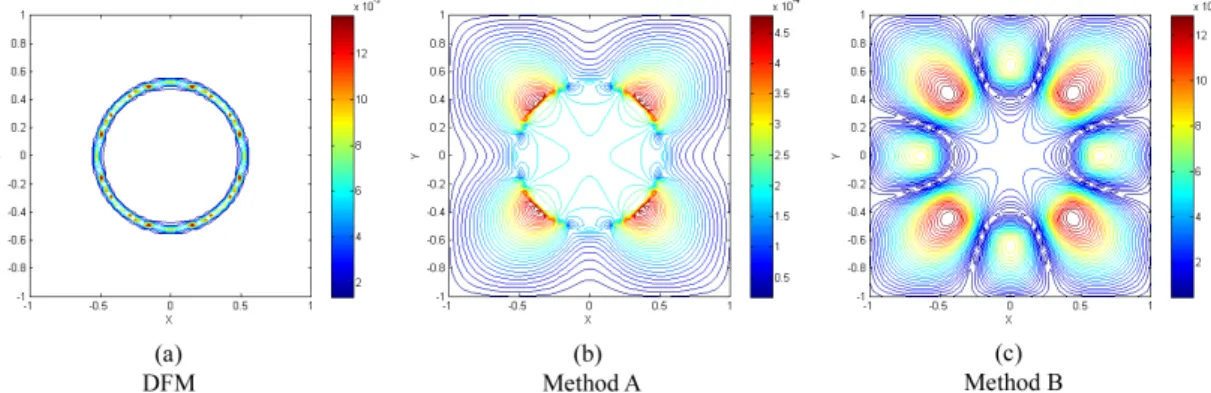
Fig. 5 shows that the main error in the computations are originated from the interface. This demonstrates the importance of using higher-order method
Figure 5: Contour of numerical error
Methods DFM Method A Method B
kEnk∞ Order kEnk∞ Order kEnk∞ Order
30 × 30 0.031 2.204e-3 6.867e-4
60 × 60 0.015 0.99 2.873e-4 2.94 1.072e-4 2.68
120 × 120 0.008 0.96 5.312e-5 2.43 3.286e-5 1.70
240 × 240 0.004 0.93 1.225e-5 2.16 8.134e-6 2.01
Table 3: Comparison of numerical errors
Example 4.2 In this example, we consider the discontinuous Poisson prob-lem with the elliptic interface:
Γ : x
2
a2 +
y2
b2 = 1,
and we use the notations
4u± = f± in Ω±,
[u] = w(s) on Γ, (77)
[un] = v(s) on Γ,
u = u0 on ∂Ω.
We derive the jump conditions [u] and [βun] from the exact solution. Four
different examples as shown in Table 4 are tested. Unlike in Example 4.1, the solution in this example is discontinuous.
Remember that in order to calculate the jump conditions (61) and (62),
we need the unit normal vector n = (n1, n2). In this example, we use
Case 1 Case 2 Case 3 Case 4
u− 1 x2− y2 excos(y) sin(x) cos(y)
u+ 1 + log(2
p
x2+ y2) 0 0 0
f− 0 0 0 −2 sin(x) cos(y)
f+ 0 0 0 0
Table 4: Four test cases for Eq. (77).
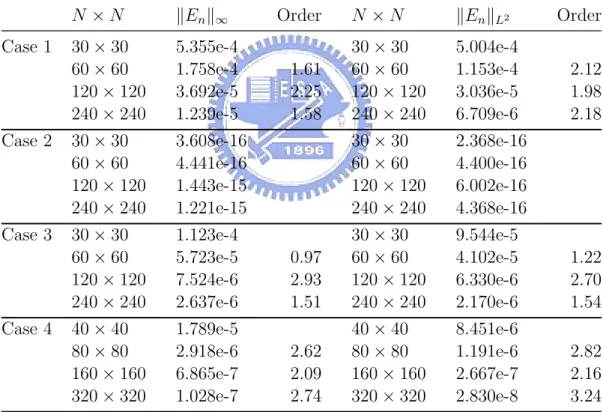
In Case 2, since the exact solution is a polynomial, the maximum errors are machine errors. Note that for Case 4, we use the different grids since the Cartesian grid cannot fetch the interface behavior if we use the same grid for other cases.
N × N kEnk∞ Order N × N kEnkL2 Order
Case 1 30 × 30 5.355e-4 30 × 30 5.004e-4
60 × 60 1.758e-4 1.61 60 × 60 1.153e-4 2.12
120 × 120 3.692e-5 2.25 120 × 120 3.036e-5 1.98
240 × 240 1.239e-5 1.58 240 × 240 6.709e-6 2.18
Case 2 30 × 30 3.608e-16 30 × 30 2.368e-16
60 × 60 4.441e-16 60 × 60 4.400e-16
120 × 120 1.443e-15 120 × 120 6.002e-16
240 × 240 1.221e-15 240 × 240 4.368e-16
Case 3 30 × 30 1.123e-4 30 × 30 9.544e-5
60 × 60 5.723e-5 0.97 60 × 60 4.102e-5 1.22
120 × 120 7.524e-6 2.93 120 × 120 6.330e-6 2.70
240 × 240 2.637e-6 1.51 240 × 240 2.170e-6 1.54
Case 4 40 × 40 1.789e-5 40 × 40 8.451e-6
80 × 80 2.918e-6 2.62 80 × 80 1.191e-6 2.82
160 × 160 6.865e-7 2.09 160 × 160 2.667e-7 2.16
320 × 320 1.028e-7 2.74 320 × 320 2.830e-8 3.24
Table 5: Comparison of numerical errors by method A with result for a = 0.6, b = 0.4.
4.3.2 Elliptic Equation
Example 4.3 We use the example, which was used by Leveque and Li[3] to test IIM in this thesis. An elliptic equation with a delta function source term and with a discontinuous coefficient β as follows:
∇ · (β∇u) = f (x, y) + C Z Γ δ(x − X(s))δ(y − Y (s))ds, (78) where f (x, y) = 8(x2+ y2) + 4, and β = ( x2+ y2+ 1 if px2+ y2 ≤ 1/2, b if px2+ y2 > 1/2,
and the interface Γ : x2+ y2 = 1/4. The exact solution is
uex = x2+ y2 if px2+ y2 ≤ 1/2, 1 − 1 8b − 1b 4 + (x2+y2)2 2 + x2+ y2 b + C log(2px2+ y2) b if p x2+ y2 > 1/2.
For the current case, the jump conditions on Γ are
[u] = 0, (79) · β∂u ∂n ¸ = C. (80)
Here we derive the necessary two jump conditions for partial derivative by the method in Sec. 4.2.
C = 0.1 40 × 40 80 × 80 160 × 160 320 × 320
b kEnk∞ kEnk∞ Order kEnk∞ Order kEnk∞ Order
10.0 8.15e-5 2.53e-5 1.69 5.76e-6 2.14 1.38e-6 2.06
5.0 1.58e-4 4.97e-5 1.67 1.12e-5 2.15 2.71e-6 2.06
1.0 6.99e-4 2.31e-4 1.59 5.04e-5 2.20 1.24e-5 2.02
0.01 0.05985 0.02128 1.49 0.00431 2.30 0.00112 1.94
0.005 0.11961 0.04255 1.49 0.00861 2.30 0.00225 1.94
Table 6: Comparison of numerical errors
According to the exact solution, as b decreases, the maximum magnitude of |u(x, y)| increases. Therefore, the computational errors will increase when the value of b decreases.
Example 4.4 In this example, we consider the discontinuous elliptic equa-tion with elliptic interface:
Γ : x2
a2 +
y2
b2 = 1
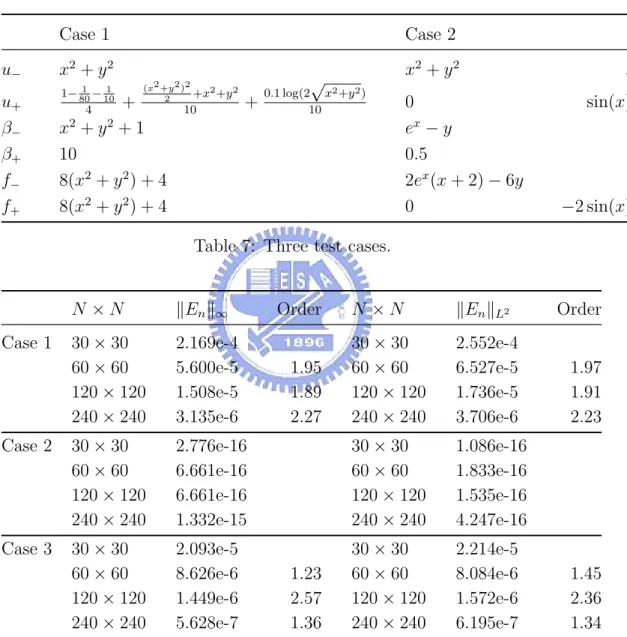
Case 1 Case 2 Case 3
u− x2+ y2 x2+ y2 x2− y2 u+ 1− 1 80− 1 10 4 + (x2+y2)2 2 +x2+y2 10 + 0.1 log(2√x2+y2) 10 0 sin(x) cos(y) β− x2+ y2+ 1 ex− y 1 β+ 10 0.5 2 f− 8(x2+ y2) + 4 2ex(x + 2) − 6y 0 f+ 8(x2+ y2) + 4 0 −2 sin(x) cos(y)
Table 7: Three test cases.
N × N kEnk∞ Order N × N kEnkL2 Order
Case 1 30 × 30 2.169e-4 30 × 30 2.552e-4
60 × 60 5.600e-5 1.95 60 × 60 6.527e-5 1.97
120 × 120 1.508e-5 1.89 120 × 120 1.736e-5 1.91
240 × 240 3.135e-6 2.27 240 × 240 3.706e-6 2.23
Case 2 30 × 30 2.776e-16 30 × 30 1.086e-16
60 × 60 6.661e-16 60 × 60 1.833e-16
120 × 120 6.661e-16 120 × 120 1.535e-16
240 × 240 1.332e-15 240 × 240 4.247e-16
Case 3 30 × 30 2.093e-5 30 × 30 2.214e-5
60 × 60 8.626e-6 1.23 60 × 60 8.084e-6 1.45
120 × 120 1.449e-6 2.57 120 × 120 1.572e-6 2.36
240 × 240 5.628e-7 1.36 240 × 240 6.195e-7 1.34
Table 8: Comparison of numerical errors by method A with result for a = 0.8, b = 0.2.
4.3.3 Application of Heat Equation
Example 4.5 We use the example used by Shen and Li[6], the heat equa-tion with an interface as follows
ut = ∇ · (β∇u), Ω = [−1, 1] × [−1, 1], t ∈ [0, ∞] (81) where β(x, y) = ( β− if (x, y) ∈ Ω−, β+ if (x, y) ∈ Ω+. (82)
We give the initial condition
u(x, y, 1) = exp µ −x 2+ y2 4β ¶
and the Dirichlet boundary condition when (x, y) ∈ ∂Ω and two natural jump
conditions [u] and [βun] by the exact solution:
u(x, y, t) = 1 t exp µ −x2+ y2 4βt ¶ . (83) We use the Crank-Nicolson method in this example. The steps of our algo-rithm can be outlined as follows:
Step 1. Reinitialize φ to be an exact signed distance function by solving the
equation, φt = sgn(φ0)(1 − |∇φ|) to steady state.
Step 2. Compute outward normal vector n by Eq. (8). We compute this value
at grid points neighboring the interface, then we interpolate its value on the interface whenever it is needed. Eq. (8) is numerically solved using center difference approximations to the partial derivatives of φ.
Step 3. Use φ to determine a flag matrix F . For example, let F (i, j) = 0 if (xi, yj) is regular point;
F (i, j) = 1 if (xi, yj) is irregular point.
Then we can use F to determine what kind the grid points are. Also,
we compute the distance form irregular (xi, yj) to the interface in either
Step 4. Use the Crank-Nicolson method as following: un+1 i,j − uni,j 4t = 1 2(βi,j4u n+1
i,j + βi,j4uni,j).
Rearrange the equation above, we have
4t(βi,j4un+1i,j ) − 2un+1i,j = −4t(βi,j4uni,j) − 2uni,j (84)
Use F to distinguish grid points. For regular point, we use five-point
Laplacian to discretize 4un+1i,j on the left hand side of Eq. (84). For
irregular point, we discretize 4un+1
i,j term by IIM in this thesis. This
scheme is always numerically stable and convergent but usually more numerically intensive as it requires solving a linear system AU = b of numerical equations on each time step.
Step 5. Since our interface is fixed, the matrix A is fixed. We repeat Step 4 to
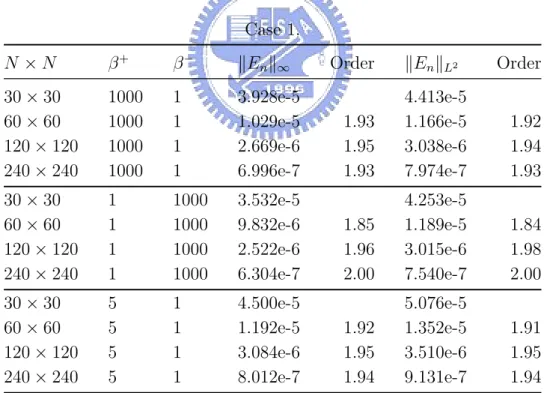
get the solution u at next time step. Case 1. N × N β+ β− kE nk∞ Order kEnkL2 Order 30 × 30 1000 1 3.928e-5 4.413e-5 60 × 60 1000 1 1.029e-5 1.93 1.166e-5 1.92 120 × 120 1000 1 2.669e-6 1.95 3.038e-6 1.94 240 × 240 1000 1 6.996e-7 1.93 7.974e-7 1.93 30 × 30 1 1000 3.532e-5 4.253e-5 60 × 60 1 1000 9.832e-6 1.85 1.189e-5 1.84 120 × 120 1 1000 2.522e-6 1.96 3.015e-6 1.98 240 × 240 1 1000 6.304e-7 2.00 7.540e-7 2.00 30 × 30 5 1 4.500e-5 5.076e-5 60 × 60 5 1 1.192e-5 1.92 1.352e-5 1.91 120 × 120 5 1 3.084e-6 1.95 3.510e-6 1.95 240 × 240 5 1 8.012e-7 1.94 9.131e-7 1.94
Case 2. N × N β+ β− kE nk∞ Order kEnkL2 Order 30 × 30 1000 1 5.220e-5 4.855e-5 60 × 60 1000 1 1.352e-5 1.95 1.287e-5 1.92 120 × 120 1000 1 3.478e-6 1.96 3.336e-6 1.95 240 × 240 1000 1 8.674e-7 2.00 8.280e-7 2.01 30 × 30 1 1000 5.023e-5 5.092e-5 60 × 60 1 1000 1.363e-5 1.88 1.363e-5 1.90 120 × 120 1 1000 3.492e-6 1.88 3.439e-6 1.99 240 × 240 1 1000 8.963e-7 1.96 8.834e-7 1.96 30 × 30 5 1 5.884e-5 5.544e-5 60 × 60 5 1 1.537e-5 1.94 1.475e-5 1.91 120 × 120 5 1 3.947e-6 1.96 3.806e-6 1.95 240 × 240 5 1 9.903e-7 1.99 9.528e-7 2.00
Table 10: Numerical results with Γ : ¡ x
0.8
¢2
+¡0.2y ¢2 = 1, ∆t = h, T = 2.
5
Conclusion
The advantage of the IIM in this thesis is that the finite difference formulas at irregular points are expressed in an explicit form, so they can be applied to difference problems without modifications. But there are still hard work
when we use the natural jump condition [βun], so our method will fail if the
problem with concave interface.
Our future work is to calculate [un] by the relation
[un] =
[βun] − [β]u−n
β+ .
Thus, we have to solve the unknown term u−
n. Li[4] offered the method by a
similar method introduced in original IIM.
There are two challenges. First one is modify our IIM by the method introduced above. Second one is use the modified IIM to solve the Stefan problems[11, 12, 13].
Acknowledgments The method and most notations we used in this thesis are referred by Zhong[1]. Especially we thank Tsai for providing the code of re-initialization process.
References
[1] X. Zhong. (2007). A new high-order immersed interface method for solv-ing elliptic equations with imbedded interface of discontinuity, Journal of Computational Physis. 225, 1066-1099.
[2] Z. Li, K. Ito. (2006). The Immersed Interface Method : Numerical So-lutions of PDEs Involving Interfaces and Irregular Domains, SIAM. [3] R.J. LeVeque. (1994). Z. Li, The immersed interface method for elliptic
equations with discontinuous coefficients and singular sources, SIAM J. Numer. Anal. 31, 1001-1025.
[4] Z. Li. (1998). A Fast Iterative Algorithm for Elliptic Interface Problems, Journal on Numerical Analysis. 35, 230-254.
[5] Z. Li. (1997). Immersed interface methods for moving interface problems, Numerical Algorithms. 14, 269-293.
[6] Y. Shen, Z. Li, A numerical method for solving heat equations involving interfaces, Electron. J. Diff. Eqns., Conf. 03 (1999) 100-108.
[7] Y.C. Zhou, S. Zhao, M. Feig, G.W. Wei. (2006). High order matched interface and boundary method for elliptic equations with discontinuous coefficients and singular sources, J. Comput. Phys. 213, 1-30.
[8] A. Wiegmann, Kenneth P. Bube. (2000). The Explicit-Jump Immersed Interface Method: Finite Difference Methods for PDES with Piecewise Smooth Solutions, SIAM , Journal on Numerical Analysis, 37, 827-862. [9] A. Mayo. (1984). The fast solution of Poissons and biharmonic equations
on irregular regions, SIAM J. Numer. Anal. 21, 285-299.
[10] S. Osher, R. Fedkiw. (2003). Level Set Methods and Dynamic Implicit Surfaces, Springer.
[11] S. Chen, B. Merriman, S. Osher and P. Smereka. (1997). A simple level set method for solving Stefan problems, Journal of Computational Ph-ysis. 135, 8-29.
[12] Z. Li. (1997). Immersed interface methods for moving interface problems, Numerical Algorithms. 14, 269-293.
[13] Z. Li, B. Soni. (1999). Fast and accurate numerical approaches for stefan problems and crystal growth, Numerical Heat Transfer, Part B, 35,