行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※
※ ※
※ 可應用於環工程控之類神經模糊操作支援系統之研究(II) ※
※ ※
※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:■個別型計畫
□整合型計畫
計畫編號: NSC 90-2211-E-002-051
執行期間:
90 年 08 月 01 日至
91 年 07 月 31 日
計畫主持人:
駱 尚 廉 教授
共同主持人:
計畫參與人員:盧 瑞 山 博士
張嘉玲、張博銘
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立台灣大學 環境工程學研究所
中
華
民
國
91
年
10 月 31 日
行政院國家科學委員會專題研究計畫成果報告
可應用於環工程控之類神經模糊操作支援系統之研究
Development and Implementation of A Neural Fuzzy Operation Support System Available Applied in the Process Control of Environmental Engineering
執行期限:90 年 8 月 1 日至 91 年 7 月 31 日 計畫編號: 90-2211-E-002-051
主 持 人 : 駱尚廉 教授 國立台灣大學環境工程學研究所
計畫參與人員:盧瑞山 博士 國立台灣大學環境工程學研究所
張嘉玲、張博銘 國立台灣大學環境工程學研究所
一、中英文摘要 本研究提出一種新方法論—類神經模糊規則 轉換法—此法是依據實際系統操作所取得之數據 藉由類神經網路學習後,從網路之中擷取符合該系 統之操作控制法則。類神經網路於此方法論中是以 其具備高度學習能力而扮演專家的角色,學習過後 的網路有如一個專家而其知識是隱含於之鏈結權 重之中,透過轉換步驟可將該知識自網路中擷取出 來並實現成模糊規則,再由取出之規則建立模糊控 制器,並應用於廢水處理單元以進行處理效率之預 測。為了驗證我們所提出的操作支援模式,本計畫 在第二年裡設計了一個活性污泥與接觸氧化的串 聯系統的生物處理系統以供第三年驗證模式使用。 關鍵詞:模糊控制、模糊推論、類神經網路、類神 經模糊控制器。 Abstr actArtificial neural networks (ANN), which can learn the historical data of a plant, provide operational guidance for plant operators, and fuzzy systems (FS) establish a framework that sets operators' control experiences into fuzzy rules. In this research, an interpretation of ANN is provided so that ANN will no longer be seen as a black-box. This is shown by establishing the equality between a certain class of ANN and FS. In addition, an automated knowledge acquisition procedure is obtained, employing ANN as a learning machine and a mathematical model from which to extract fuzzy rules.
For testifying our model purpose, a two-phase biological treatment system of activated sludge/contact aeration process was established in this year.
Keywor ds: Fuzzy System, Neural Network 二、緣由與目的 目前環工上若干處理單元如活性污泥廢水處 理程序、廢棄物焚化處理設施等都是屬於複雜的操 控系統,整個系統中常存有未知及不確定性之問題 待克服,因此操作條件微小的改變容易造成差異甚 大之處理結果。要操作帶有不確定性之複雜系統並 達到較滿意的處理效率,得先從這不明確之系統中 擷取出系統操作中之行為特徵,是故研發一套能輔 助現場操作人員進行程序控制之整合式智慧型操 作支援系統(Integrted Intelligent Opertion Support System)實屬必要。 工程上由於類神經網路具有識別與學習非線 性動態系統之能力,已廣泛應用於系統鑑別(system identification)和非線性控制上。在環境工程領域 上,近來也多有應用實例。萬(1996)因應污水處理 廠傳統穩態設計及操作方式對於水質水量變化大 時效率不彰情形,應用類神經網路於識別動態系統 之能力於活性污泥程序的動態行為上,以建立污水 廠的預測模式,支援污水廠之操作策略。龔(1997) 利用類神經網路來進行系統識別並預測一已知動 態進流模廠所須之回流污泥控制量,與 F/M 控制法 比較,可達較佳 SS 去除效果。在自來水供水系統 的消毒餘氯控制上,Rodriquez(1997)研究加拿大 多倫多市自來水定期監測的水質資料以及水廠操 作記錄,建構類神經網路進行水中餘氯變化情況的 預測,並模擬操作員調整加氯量之經驗程序。 在類神經網路與模糊系統之相關性研究上, 多層前授式網路在數學上已被證明可精確近似任 何可量測之函數關係(Hornik, 1989),一般稱此有能 力作這樣映射(mapping)之網路為「通用近似器」 (universal approximator)。由於這樣的特性,類神經 網路可直接學習輸入與輸出變數間之映射關係,應 用於複雜系統行為之掌握。 如同類神經網路,模糊系統亦具有通用近似 器(universal approximator) 之性質,即模糊系統可 以任意精確度逼近任何連續實函數。Wang(1992) 證明採高斯隸屬函數,去模糊機構為重心法(center average defuzzifier)之模糊系統是通用近似器。此證 明結果非常重要,因其說明了這一類型的模糊系統 皆 具 有 通 用 近 似 器 的 性 質 。 針 對 其 他 類 型 , Kosko(1994)及 Jang(1993)證明模糊加成系統(fuzzy additive system)亦為通用近似器。之後,陸陸續續, 各式其他模糊系統如 Sugeno 模糊控制器的變形及 其他特定形式的模糊控制器(Castro,1996)也都經證 明是通用近似器,均能近似任何函數到任意精度。 本研究之目的係為探討結合類神經網路與模 糊邏輯控制所設計之類神經模糊操作支援系統
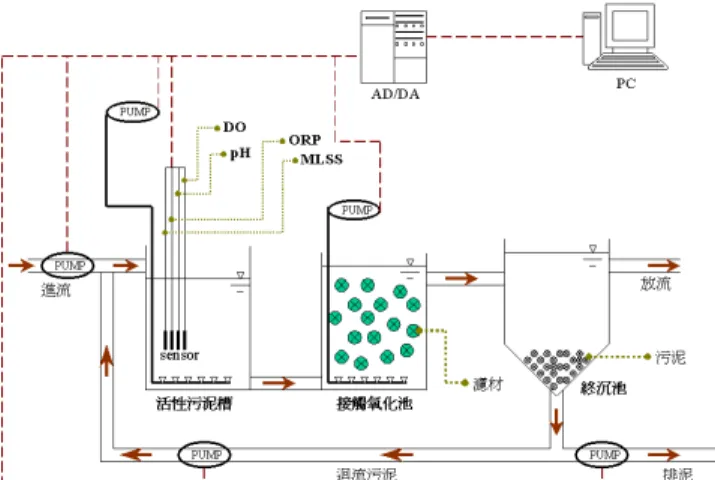
(neural fuzzy operation support system, NFOSS)之可 行性。希藉由類神經網路對數據之學習能力以扮演 專家的角色,對網路習得之隱含於數據中之非線性 輸出入關係,藉由模糊系統之轉譯步驟建立模糊數 學模式,以自網路中擷取出若干模糊規則(fuzzy rule),再由取出之模糊規則建立模糊邏輯控制系 統,而模糊操作規則之擷取即是研發可應用於程序 控制上之操作支援系統之核心技術。 本年度(第二年度)之研究工作為選定台灣大 學福華餐廳之廢水為研究對象,研發一座現地小型 生物式廢水處理系統,設計後隨即進行安裝與測 試,本年度之工作任務為替第三年之研究進行先導 準備工作,目的是將第一年所完成之類神經模糊操 作支援系統能於第三年度實際應用於一小規模之 生物廢水處理系統之現地操作。工作進度之分配情 況為本年度上半年先進行生物式廢水處理系統之 篩選研究,下半年則以最終篩選後之廢水處理系統 完成小型模場之設計、安裝測試與運轉。由於生物 式廢水處理系統需進行生物相之培養與調整,估計 這段期間約需耗費 6 個月時間,待系統穩定之後即 可進行第三年之操作支援系統與廢水處理系統之 整合研究。 三、結果與討論 1. 生物式廢水處理系統之篩選 由於本研究之廢水處理之研究對象擬訂為餐 廳食品廢水,具高油脂性廢水常使用的處理方式有 四種(Johns et al., 1995; Manjunath et al., 2000):1.厭 氧處理+活性污泥法;2.厭氧處理+接觸曝氣法;3. 活性污泥法+化學混凝沈降法;4.接觸曝氣氣+化學 混凝沈降法。若有用厭氧處理系統者,所需佔用的 空間大;而有用化學混凝沈降法者,所需藥品的耗 用量大且污泥產量多。 活性污泥法為最傳統的生物處理方法之一, 廣泛運用於各種廢水處理,其優點為基質混合均 勻、操作具有彈性、設備費用低等;但有污泥膨化、 污泥量多、操作不易等缺點。 接觸曝氣法是從活性污泥法改良而來,在活 性污泥曝氣池中,放置生物接觸濾材,使懸浮性的 生物相改變成固定生物膜式的生物相,其優點為生 物相多、污泥量少、污泥易沈降等;但有易阻塞、 無操作彈性、多增生物接觸濾材的費用等缺點。 (Nakajimaj et al., 2000) 本研究所使用之活性污泥/生物接觸曝氣法合 併系統,如圖 1 所示,具有複雜而完整的生物相, 可有效的提高微生物對有機物的去除率,其優點為 基質混合均勻、操作具有彈性、生物相多、污泥量 少、污泥易沈降、不易膨化、不易阻塞、出流水質 佳,為最經濟方便的污水廠功能加強方法。與活性 污泥法比較,多了生物濾材的費用、但比接觸曝氣 法用的生物濾材量少。 2. 模型設備設計及製作 本研究係利用台灣大學福華餐廳之具簡易廢 水處理功能的調節池廢水,進行活性污泥/生物接觸 曝氣法合併系統的模型實場實驗。 實場放置水槽依序為活性污泥槽 1 座、接觸 曝氣槽 1 座、沈澱池 1 座,其詳細尺寸及有效容積 如表 1 所示,流程圖如圖 2 所示,本模型廠所使用 的機械設備有:定量進水泵浦 1 台、定量迴流污泥 泵 1 台、定量曝氣機 4 台、生物接觸濾材 5 m3。本 模型廠所使用的監控設備有:DO meter 1 組、pH meter 1 組、ORP meter 1 組、MLSS meter 1 組。
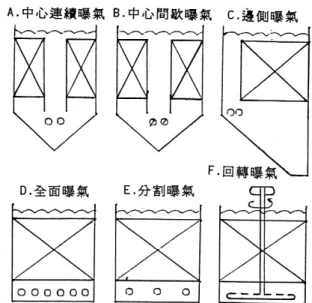
圖 1. 活性污泥/生物接觸曝氣法合併系統之流程圖 活性污泥/生物接觸曝氣法合併系統之各項反 應槽裝置之設計概念是由壓克力流層版,PVC 管所 構成,活性污泥曝氣槽、接觸氧化槽及沉澱槽之設 計圖如圖 2 至圖 3 所示。 (1) 活性污泥曝氣槽(圖 2):長 30 cm,寬 30 cm, 高 30 cm,厚度 5 mm,入流口 5 mm,出流口 5 mm。 (2) 接觸氧化槽(圖 2):長 30 cm,寬 30 cm,高 30 cm,厚度 5 mm,開口尺寸為 1 cm(與兩側距離為 9 cm),接觸濾材之安置情形為圖 4 中之(d)型。 (3) 沉澱槽(圖 3):長 30 cm,寬 30 cm,高 30 cm, 有 4 個出水口,開口尺寸為 5 mm(與兩側距離分別 為 1 cm),原設計為圓形槽體後更改為方形槽體。 表 1 系統設計參數 尺寸 有效容積 停留時間 活性污泥曝 氣槽 30×30×30 cm3 25×30×30 cm3 4 小時 接觸氧化曝 氣槽 30×30×30 cm3 25×30×30 cm3 4 小時 沉澱槽 30×30×30 cm3 12×30×30 cm3 2 小時
圖 2. (a)活性污泥曝氣槽與接觸曝氣槽俯視圖 (b) 側視圖(c) 正視圖 圖 3. (a)沉澱槽俯視圖(b)溢流堰側視圖(c) 沉澱槽 側視圖(d) 沉澱槽正視圖 3. 模型設備之現場安裝 製作完成之廢水處理系統模型,由研究人員 帶至台灣大學福華餐廳進行安裝。首先先將活性污 泥曝氣槽、接觸曝氣槽與沉澱槽先行串聯組裝。組 裝完成之後,利用 1 台定量進水泵浦將調勻池中之 屠宰廢水抽送至活性污泥曝氣槽並控制適當之進 水流量以維持水力停留時間為 4 小時。另以 1 台定 量迴流污泥泵則將沉澱槽中之沉澱污泥抽送至活 性污泥曝氣槽,迴流率定為 25%。活性污泥曝氣槽 與接觸曝氣槽內各以 2 台定量曝氣機持續曝氣。安 裝初期,接觸曝氣槽尚未填充接觸濾材。待此系統 持續運轉兩星期之後,再將接觸濾材填充至接觸曝 氣槽內。接觸濾材之形狀採球狀鏤空支架形狀之濾 材而填充方法則採用全面曝氣法如圖 4 中之(d)圖 所示,由於本濾材質輕易懸浮露出水面,因此需以 支架固定,如圖 5 所示。 圖 4. 各種生物接觸曝氣槽之濾材安置形式 圖 5. 接觸濾材之安裝 圖 6. 完工後之小型活性污泥/生物接觸曝氣法合併 系統
圖 7. 完工後之小型活性污泥/生物接觸曝氣法合併 系統之監控系統外貌 圖 8. 監控系統之內部情況包括一台筆記型電腦及 各種電子式監控裝置 圖 9. 接觸濾材附著生物膜之情形 4. 廢水處理系統功能評析 本系統日後於穩定狀態下,預定每個月定期 於調節池與放流池採樣,分析進流水與放流水之各 項水質指標,包括 pH 值、水溫、生化需氧量 (BOD)、化學需氧量(BOD)、懸浮固體物(SS)、 氨氮(NH3-N)、總磷(T-P)等,以探討合併系 統之處理效率。並改變實驗操作變因,得出活性污 泥/生物接觸曝起池合併系統對於處理台灣大學福 華餐廳廢水之最佳操作條件。 圖 10 乃是本計畫針對台大福華餐廳進行連續 24 小時水質採樣之分析結果。從圖 10 的結果可看 出本系統初始運轉的廢水處理功效。以 COD 為 例 , 進 入 活 性 污 泥 池 前 之 的 原 水 水 樣 約 有 400~1200ppm 的 COD,經約 8 小時的停留時間之 後,出流水水樣仍殘餘約 200~300ppm 的 COD。由 此看來本系統之微生物系統已具初步處理功效。圖 11 則是本系統經過十數天連續運轉後之水質監測 結果。從圖 11 的結果可看出本系統漸達穩定運轉 後處理效果有明顯提升。以連續 2 小時監測 COD 為 例 , 進 入 活 性 污 泥 池 前 之 的 原 水 水 樣 約 有 200~700ppm 的 COD,經約 8 小時的停留時間之 後,出流水之 COD 皆小於 100 ppm。 關於氮營養鹽的變化趨勢如圖 13 所示,從圖 12 中可觀察到放流水中的 NO3-之濃度非常低,約 低於 0.1ppm 以下,而活性污泥池與接觸氧化池中 的 NO3-濃度則呈現時而增加又下降的趨勢,所有的 變動範圍約在 4.5ppm 以下。從數據之變化亦可證 實系統內脫硝作用乃間歇性的發生,唯濃度的改變 並不是十分明顯。圖 13 則是顯示廢水處理系統中 各項物理性監測指標的變化情形,其中包括 DO、 pH、ORP 及 MLSS。在這四項指標中,本研究發現 氧化還原電位 ORP 最能顯現系統變化的趨勢。例 如對照圖 12 及圖 13 後,可發現在活性污泥槽中的 NO3-濃度升高時,相對應的氧化還原電位值也會較 高。 另外微生物相的觀察方面,在接觸氧化池中可 明顯看出生物模附著在塑膠濾材之上,且連濾材中 空的部分也累積相當厚實的生物膜(如圖 10 所 示)。未來關於活性污泥池與接觸氧化池的微生物 相的分析比較擬於第三年度之計畫中藉助其他相 關的生化分析來探討。 台大福華24hr水質監測 0 200 400 600 800 1000 1200 1400 1600 09:0010:0011:0012:0013:0014:00 15:0016:0017:0018:0019:0020:0021:0022:0023:0000:0001:0002:0003:00 04:0005:00 06:0007:0008:0009:00 Time(hr) COD(mg/L) 原水 活性污泥池 接觸氧化池 放流水 圖 10. 餐廳原水 COD 值及小型活性污泥/接觸氧化廢水 處理系統初始運轉之水質處理效果
台大福華污水二小時連續監測 0 100 200 300 400 500 600 700 10:00 10:15 10:30 10:45 11:00 11:15 11:30 11:45 12:00 Time(hr) COD(mg/l) 原水 活性污 泥池 接觸氧 化池 放流水 圖 11. 系統於穩定運轉後之各段水質處理效果 圖 12. 系統於較穩定狀態下各段硝酸鹽氮之監測結果 24hr監測--DO,pH,ORP 0 2 4 6 8 10 12 10:00 12:00 14:00 16:00 18:00 20:00 22:00 00:00 02:00 04:00 06:00 08:00 時間 0 20 40 60 80 100 120 140 160 pH DO ORP 圖 13. 廢水系統中各項監測指標的變化情形 5. 類神經模糊操作操作支援系統之設計 本研究所設計之類神經模糊操作支援系統應 用於生物式廢水處理模場之架構圖如圖 14 所示。 架構圖中的最底層為廢水處理模廠,往上第二層為 資料擷取層,主要透過可程式控制器(PLC)連結溶 氧(DO)、酸鹼值(pH)、氧化還原電位(ORP)及混合 懸浮式液體顆粒(MLSS)等四種感測電極以獲得系 統中的監測數據。第三層則為資料分析層,此層具 有系統狀態診斷辨識與回饋控制機制,系統中可受 控制的物理量為曝氣機的開關、酸鹼加藥機的開 關、回流污泥量等。資料分析層中所有的程式則是 以 Matlab 的程式語言開發類神經模糊診斷程式, 而系統控制程式則以 Lab-Link 圖控軟體開發系統 控制程式。架構圖中的第四層為資料儲存層,本研 究以筆記型電腦作為資料數據的儲存伺服系統。最 上 一 層 則 為 作 業 系 統 , 整 套 系 統 係 安 裝 於 Windows98 的環境中執行。監控系統的外觀如圖 7 所示,打開機箱面板之後可看到筆記型電腦安裝在 機箱之中進行連續性的監控與操作(如圖 8 所示)。 圖 14. 類神經網路模糊操作支援系統應用於廢 水模場之架構圖 圖 15. 操作支援系統之控制策略流程 6. 以 SOM 模式進行系統狀態之辨識 整個操作支援系統之控制策略流程,如圖 15 所示。當整個操作支援系統收集到足夠量的數據之 後,便以類神經網路中之自組織映射圖形網路 (Self-organizing Map, SOM)來分析與辨識整個廢水 處理系統處於何種狀態,然後依照 SOM 的判釋結 果為正常狀態抑或是異常狀態,對應地啟動不同的
程序。例如當廢水處理系統處於異常狀態時,則由 控制系統負責調節曝氣量、酸鹼值、回流污泥量與 停留時間等等之控制參數。若是處於正常狀態,則 代表系統處於常態運轉之中,系統無須做任何控制 上的更動。關於 SOM 相關學理部分可參考盧氏等 人之著作(盧瑞山、駱尚廉,2002)。 以 SOM 來判釋廢水處理系統的操作狀態,方 法上是將現場操作員所具有的專業知識,藉由大量 的歷史監測數據來訓練一個類神經網路模型,此過 程猶如專業知識的養成。經由特定的演算法與大量 的歷史數據所訓練出來的 SOM 網路,將具有辨識 分析的功能,換言之,我們可以想像受過訓練的 SOM 模式猶如一個具有專業知識的專家,由於 SOM 乃是一種軟體技術,不具生命現象,因此亦 有學者稱此類的模式為 Software sensor(Choi and Park, 2002)。 為驗證 SOM 網路是否適合作為類神經模糊操 作支援系統中之 software sensor,本研究將小型廢 水處理系統架設好後之連續 30 天之溶氧(DO)、酸 鹼值(pH)、氧化還原電位(ORP)及混合懸浮式液體 顆粒(MLSS)等四種監測數據,共計 7151 筆資料, 作為 SOM 的訓練資料之用。SOM 模式之相關設定 與操作皆參照盧氏發表於 Water Research 期刊之方 法(Lu and Lo, 2002)。訓練結果如圖 16 所示。由 SOM 的輸出圖形上可發現若干重要的訊息。首先 前 10 天之監測數據皆落於輸出圖形之上方的區域 (紅色的點),第 10 天到第 20 天的數據則落於圖形 上的右下角區域(綠色的點),而第 20 天到第 30 天 的數據則落於圖形上的左下角區域(綠色的點)。 針對這樣的結果,本研究的解釋是 30 天中的 前 10 天數據,基本上屬於系統初始運轉的監測數 據,活性污泥池與接觸氧化池中微生物相尚未建立 起來,所以這些數據具有特異性,但隨著廢水系統 運轉的時間愈來愈久之後,愈晚收集到的監測數據 則明顯地與初始運轉時的監測數據有明顯的差 異,不管是在 MLSS 或是 ORP。所以在 SOM 輸出 圖上發現監測數據開始向右及向下方移動。 圖形上綠色的點代表第 10 天到第 20 天的監測 數據,我們可發現綠色的點由右下角漸漸移動至圖 形上的正下方甚至是左下方區域,而且其變動的幅 度與紅色的點變動的幅度都很大,這可從系統運轉 初期至平穩狀態時,微生物相大量增加的方向來解 釋而且亦很合常理。 而圖形上藍色的點則代表第 20 天到第 30 天的 監測數據,我們可發現藍色的點主要集中在圖形上 的左方區域,甚至有些數據與綠色點有互相重疊情 況發生,這代表著廢水處理系統自 15 天以後漸漸 達到平穩的狀態,所以會有些藍色的點與綠色的點 相重疊現象。從圖形上亦可看出藍色點的變動幅度 不若綠色點與紅色點的幅度來的大,這意味著當系 統達到穩定之後,監測數據的變動幅度不大,頂多 只有零星的擾動發生。 綜合來看,圖 16 中可明顯觀察出紅綠之間的 遞移現象及藍綠之間的震盪現象。由於紅色點代表 系統初始運轉時期所收集到數據,而紅色點又集中 在圖形的上方區域,因此 SOM 輸出圖上的上方區 可視為初始運轉狀態識別區。同理圖上的右下區及 左下區則可分別視為系統活化區與系統穩態區。 依上節所述之觀察,本研究發現 SOM 具有良 好的系統狀態診斷與辨識的功能。因此依此成果, 日後應可嘗試將 SOM 作為廢水處理操作支援系統 中的決策分析模組的核心。並依此發展出每套系統 所對應之模糊操作規則。而此部分的研究工作將留 待第三年之研究進計畫繼續進行。 圖 16. 連續 30 天廢水處理系統之操作紀錄經 SOM 模式所診斷的結果。紅色點代表系統初始運 轉前十天的紀錄,綠色點代表第 10 天到第 20 天的監測數據,藍色的點則代表第 20 天 到第 30 天的監測數據。圖中可明顯觀察出 紅綠之間的遞移現象及藍綠之間的震盪現 象。 四、結論 依目前本研究廢水模廠架設之後的現場運作 情況看來,活性污泥/生物接觸曝氣池合併系統對於 餐廳所排放富含高量油脂廢水之處理具相當程度 之效果,且生物膜附著於塑膠濾材上呈現穩定的現 象。 本研究發現類神經網路模式中的 SOM 具有 良好的系統狀態診斷與辨識的功能。因此依此成 果,日後應可嘗試將 SOM 作為廢水處理操作支援 系統中的決策分析模組的核心。並依此發展出所研 究之系統所對應之模糊操作規則。而此部分的研究 工作將留待第三年之研究進計畫繼續進行。 五、計畫成果執行考評 研究計畫書中載明之第二年計畫中預期完成 之工作項目有
1. 中型電膠羽浮除系統模型設備之設計及製 作。本項進度已於第一年研究報告中呈現小 型電膠羽浮除系統模型之研究成果,但由於 第一年之研究結果顯示,類神經模糊操作支 援系統應較適用於複雜性較高之生物廢水處 理系統,因此本研究遂於第二年之研究進度 中將第三年欲研究之生物廢水處理系統提前 於第二年進行設計、製作與安裝以取代原先 之中型電膠羽浮除系統模型設備之設計及製 作之研究項目。 2. 完成活性污泥曝氣槽之設計與製作。 3. 完成接觸氧化曝氣槽之設計與製作。 4. 完成小型活性污泥/生物接觸曝氣法合併系統 之設計、製作與現地安裝。 5. 活性污泥/生物接觸曝氣法合併系統之運轉測 試。 6. 類神經網路分析功能之研究,本年度以 SOM 模式進行系統狀態之辨識,並完成若干成果。 六、參考文獻
Capodaglio, A. and Jones, H. (1992). “Real Time Control of wastewater treatmentoperations”. Water Science and Technology, 25, 89-101.
Chen, S., Billing, S. A. and Grant, P. M. (1990). “Non-linear system identification using neural networks”. Int. J. Control, 51(6), 1191-1214.
Choi, D.-J. and Park, H. (2002). “A hybrid artificial neural network as a software sensor for optimal control of a wastewater treatment process”. Water Research, 35(16), 3959-3967.
Enbutsu, I., K. Baba, H. Hara, K. Waseda and S. Nogita, “Integration of Multi-AI Paradigms for Intelligent Support Systems – Fuzzy Rule Extraction from a Neural Network,” Wat. Sci. Tech., 28(11-12), 333-340 (1993).
Gagnon, C., Grandjean, B. P. A. and Thibault, J. (1997). “Modelling of coagulant dosage in a water treatment plant”. Artificial Intelligence in Engineering, 11, 401-408.
Johns M. R., Harrison M. L., Hutchinson P. H. and Beswick P., (1995). ”Sources of nutrients in wastewater from integrated cattle slaughterhouse”, Wat. Sci. Tech., 32(12), pp. 53-58.
Larsen, P. M., “Industrial Applications of Fuzzy Logic Control,” Int. J. Man-Mach. Studies, 12(1), 3-10 (1980).
Linkenns, D. A. and M. Chen, “Expert Control Systems: II. Design Principles and Methods,” Eng. Appl. Artif. Intell., 8(5), 527-537 (1995).
Lu, R. -S., Lo, S. -L. (2002) “Diagnosing reservoir water quality using self-organizing maps and fuzzy
theory” Water Reseach, 36(9), 2265-2274.
Manjunath N. T., Mehrotra I., and Mathur R.P.,(2000). “Treatment of wastewater from slaughterhouse by DAF-UASB system”, Wat. Sci. Tech., 34(6), pp. 1930-1936.
Nakajima J., Fujimura Y., and Jnamori Y., (2000). ”Performance evaluation of on-site treatment facilities for wastewater from households, hotels and restaurants”, Wat. Sci. Tech., 39(8), pp. 85-92.
Spall, J. C. and Cristion, J. A. (1994). “A neural networks controller for system with unmodeled dynamics with application to wastewater treatment”. 1994 IEEE International Symposium on Intelligent Control, 273-278.
Sugeno, M. and M. Nishida, “Fuzzy Control of Model Car,” Fuzzy Sets and Systems, 16, 103-113 (1985). Tanscheit, R. and E. M. Scharf, “Experiments with the Use of a Rule-based Self-organizing Controller for Robotics Applications,” Fuzzy Sets and Systems, 26, 55-62 (1986).
Tay, J. H., Zhang, X., “Meural Fuzzy Modeling of Anaerobic Biological Wastewater Treatment Systems,” J. of Environmental Engineering, 125,12,1149-1159. (1999).
Tsaptsinos, D., Tang, R. and Leigh, J. R. (1995). “Neuroidentification of a biotechnological process: issues and application”. Neurocomputing, 9, 63-79. Wilcox, S. J. and Hawkes, D. L. (1995). “A neural network based on bicarbonate monitoring, to control anerobic digestion”. Water Research, 29(6), 1465-1470. 余瑞芳、陳萬原、廖述良、張鎮南,「類神經網路 於連續流 SBR 廢水處理系統即時控制之應用」, 第二十一屆廢水處理技術研討會論文集,457-464 (1996)。 陳威呈、張乃斌,「智慧型控制系統在生活廢水處 理程序之應用」,第二十二屆廢水處理技術研討會 論文集,654-660 (1997)。 盧瑞山、駱尚廉,「資料礦掘技術(Data mining 於 環境資料庫之應用與回顧」,第十五屆環境規劃與 管理研討會論文集,台北。 (2002)。 龔偉隆、張維欽、歐陽嶠暉,「類神經網路在動態 污水處理程序操作之應用」,第二十二屆廢水處理 技術研討會論文集, 647-653 (1997)。