行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※
※
※
※
多變數非線性不匹配干擾系統之調適
※
※
順滑模態控制器設計
※
※
※
※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:
þ
個別型計畫
□整合型計畫
計畫編號:NSC 89-2213-E-110-074
執行期間:
89 年 8 月 1 日至
90 年 7 月 31 日
計畫主持人:鄭志強 副教授
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立中山大學電機工程學系
中
華
民
國
90
年
8
月
27
日
行政院國家科學委員會專題研究計畫成果報告
多變數非線性不匹配干擾系統之調適順滑模態控制器設計
Design of Adaptive Sliding Mode Contr oller s for MIMO
Nonlinear Mismatched Per tur bed Systems
計畫編號:NSC 89-2213-E-110-074
執行期限:89 年 8 月 1 日至 90 年 7 月 31 日
主持人:鄭志強 國立中山大學電機工程學系
計畫參與人員:蕭佳明、吳培誠、賴榮志
國立中山大學電機工程學系
一、中文摘要 本計劃乃是針對某類多輸出多輸入非線性非 匹配受擾系統,在不知道模式不確定量、參數變化 及外界干擾之上界的情況之下,設計具有擾動估測 機制之調適順滑模態控制器,以解決強韌輸出追蹤 的問題。其中擾動估測機制與適應控制架構乃用於 估測未知擾動的上界,可變結構控制架構則用於增 強系統穩定度的強韌性。此控制器不僅可以經由調 整設計參數來達到所要之追蹤精準度,同時亦能夠 保持系統穩定的強韌性。 關鍵詞:模式不確定量,順滑模態控制器,擾動, 適應控制。 Abstr actThis project is concerned with the design of the adaptive sliding mode controllers for a class of MIMO nonlinear mismatched perturbed systems without the knowledge of the upper bounds of modeling uncertainties, parameter variations and disturbances. Both perturbation estimation scheme and adaptive control scheme are embedded in the proposed controller in order to estimate the upper-bound of perturbations. The robustness of overall system’s stability is realized by using variable structure control In addition, the desired output tracking accuracy can be achieved by adjusting the design parameters of the proposed controllers.
Keywor ds : modeling uncertainty, sliding mode
controller, perturbation, adaptive control。
二、緣由與目的
Sliding mode control (SMC) has been traditionally recognized as a high gain control technique with outstanding robustness features for both system stabilization and tracking [1]. This methodology offers the property of insensitivity to system parameter variations and external disturbances for systems with matched perturbation [2-7]. In order to preserve the advantage of robustness against perturbation, however, the traditional SMC pays the price of chattering phenomenon and the requirement
In the steady state, chattering phenomenon appears as a high-frequency oscillation about the equilibrium point and serves as a source of exciting the unmodeled high-frequency dynamics of system [1, 8].
One remedy for chattering phenomenon is to replace signum function with saturation function in the design of SMC [1,8,9]. However, this in general can only alleviate, not totally eliminate, chattering in practice, and the robust property of system is usually attenuated. On the other hand, high control gain is often employed in SMC for overcoming the upper bound of perturbation so that the sliding condition can be satisfied. However, if a boundary layer controller is used, it is often observed that, as the gain increases, the frequency of oscillation of dynamic trajectory increases. This is the chattering behavior when the switching feedback control action interacts with the neglected resonant frequencies of the physical plant [10]. Therefore, parasitics dynamics must be carefully modeled and considered in the design of controller in order to avoid chattering or instability inside the boundary layer. Since the knowledge of upper bounds of perturbations is not available or too expensive to access in many practical applications [5], the requirement of these information becomes another practical problem for the application of SMC technique. [6,7] have proposed a perturbation estimation scheme so that the knowledge of upper bounds of perturbations is not required. However, the knowledge of perturbation estimation error are still needed.
According to the spanned space of input's gain matrix, the perturbation of a system in general can be divided into “matched” and “mismatched” part [11]. It is well known that the traditional SMC technique provides very good invariance to matched perturbations [12]. If mismatched perturbations exist, however, the desired tracking precision using conventional SMC may in general not be always achieved. [13-15] proposed nonlinear controllers for stabilizing a certain class of mismatched perturbed systems so that the closed-loop system is at least ultimately bounded. [11] developed a control strategy to minimize the effects of the unmatched uncertainty on the dynamic performance prescribed by the switching surfaces. [16] designed a robust output
linearizable nonlinear systems, and found that the magnitude of the tracking error will bear dominant dependence on the magnitude of the mismatched uncertainties.
The objective of this report is to present a simple design method of robust tracking controllers for a class of MIMO nonlinear systems with mismatched perturbations. In order to reduce the chattering phenomenon effectively, both perturbation estimation process and an adaptive control mechanism are embedded in the controller, so that the proposed controller is designed without the requirement of the knowledge of upper-bounds of perturbations, and the proposed adaptive gain needs only to overcome the unknown upper-bound of perturbation estimation error. The resultant control scheme not only can achieve the desired tracking accuracy by adjusting the design parameters of controller, but also can offer the property of robustness of system's stability. Furthermore, the dynamic equations of the plant need not be in canonical or regular form.
三、結果與討論
Consider a class of perturbed MIMO nonlinear systems described by the following equations
, x h y u x d u x g x f x ) , ( ) ( ) , , ( ) , ( ) , ( ) ( t t t t t t = + + = & (1) where n R ∈
x is the state vector,.u∈Rp, q
R
∈
y
are the control and output vectors respectively. f , g ,
h are known vectors with appropriate dimensions,
and d(x,u,t)≡∆f(x,t)+∆g(x,t)u+w(x,t) is the unknown, lumped perturbation due to system's parameter variations, modeling inaccuracy and external disturbances. We first assume that the following assumptions are valid:
A1. The states of system are all measurable.
A2. For the output y of (1), there exists a uniform
vector relative degree
{
n1,n2,L,nq}
, andn n
q
i i≤
∑
=1 .A3. The internal dynamics of (1) are stable.
A4. The number of inputs is larger than or equal to
that of outputs, i.e., p≥q.
For the convenience and simplification of notation and derivation, we define a new state vector
[
T]
T t x x≡ , so (1) can be rewritten as , x h y u x d u x g x f x ) ( ) ( ) , ( ) ( ) ( ) ( = + + = t t & where . 0 ) , , ( ) , ( , 0 ) , ( ) ( , 1 ) , ( ) ( ≡ ≡ ≡ f x t g x g xt d x u d x u t x fFor each output yi, the jth derivative is
x x f d f ∂ & ∆ ∂ + = ∆ ∆ + = −1 , −1 , , ) ( , ij j i ij j i i j j i p h L L p p h L y ,
for j=1,2,L,ni−1 and ∆pi,0=0. If j=ni, then
. 1 , 1 , , 1 ) ( x x f d f g f & ∂ ∆ ∂ + = ∆ ∆ + + = − − − i i i i i i i n i i n n i n i i n i n n i p h L L p p h L L h L y
In order to ensure the existence of yi(j),j=1,2,L,ni, following assumption is added:
A5. The functions f , g , h and d are ni−1 times
continuously differentiable in x and piecewise continuous in t. The perturbations d( ux, ) and ∆pi,j are satisfied by
∑
∑
= = ≤ ∆ ≤ δ ϕ θ 0 , , 0 , ) , ( l l l i j i k k k x p m x u x d ,where ϕk and mi,l are unknown positive constants, and δ , θ are known positive integers.
The design procedure of the proposed controllers is as follows:
Step 1: Estimation of output tracking error dynamics
Define zi ≡
[
zi,1 L zi,2]
T and ) 1 ( , − ≡ j i j i e z . Theoutput tracking error dynamics are estimated by
) ˆ ( ) ( ˆ ˆi i i i aux pi,n,est i zi,1 zi,1 i + − ∆ + + =Az b u L z& , where . , 1 0 0 , 0 0 0 0 0 1 0 0 0 0 1 0 1 ) ( , 2 , 1 , u y u L b A f g f i n n id i n aux n i i i i i i h L L h L l l l i i i i − + − = = = = M M L M L M M M L L In order to estimate i n i p,
∆ , the auxiliary estimator is designed as ) ( i,1 i,1 i aux i i i i =Aæ +b u +L z −ζ æ& .
Let æi ≡zi−æi. It can be shown that
(
,)
,1 1 1 , , in i n i n n i i i i i s l s l p = + + + ζ ∆ − L .However, due to the complication of estimation of high order derivative and the possibility of enhancement of high frequency noise, we only estimate the zero and first order derivative of ζi,1. Therefore, i n i p, ∆ is estimated by 1 , , 1 , 1 , , , 1 i in i n i est n i i i i l s s l p ζ ε + + = ∆ − .
Step 2: Sliding surface design
The sliding surface is design as
∑
= +≡ ni
j ij ij i i i 2c, zˆ, c,1zˆ,1
σ ,
where ci,j >0 , j=1,2,L,ni−1 and ci,1=1 are real coefficients of the Hurwitz polynomial
1 , 2 1 , 1 , i n n i n n i s c s c c i i i i + + + − − − L .
Step 3: Controller design Let ø ≡
[
ψ1 L ψq]
T ,[
]
T q p p p≡ ∆ ∆ ∆ 1 L ,[
]
T p q T q n T n h L L h L L q × − − ≡ ( 1 1 1) ( 1 ) f g f g B L . Define í p Kó øuc ≡− − −∆ est− , where K ≡diag[ki] , 0
> i
k , and í≡
[
ν1 L νq]
Tis the adaptive control effort used to overcome the unknown upper-bound of perturbation estimation error, and is designed as, ) ( ˆ 0 ,
∑
= = θ β σ γ ν l l i i l i i t sat x(
ˆ)
, 0, 0. 1 ˆ , , , , , , = − + il > il > l i l i l i l i l i η γ σ α η α γ& xAssume that B is full-row rank, then the proposed controllers are designed as
c T T u BB B u 1 ) ( − = . Step 4: Estimation of ∆pi
We first define a nominal sliding function
(
)
(0) ) ( , , , , 0 nom i t t i inom iest i nom i t kσ p ν dτ σ σ ≡∫
− −∆ − + . Let ∆Ii(t)≡σi(t)−σi,nom(t), then) ( ) ( k I t dt d t pi i∆ i + = ∆ .
It is in general not desired to use a pure differentiator to estimate ∆pi. We again estimate ∆pi by utilizing a filter with transfer function s (1+εi,2s), which means that ) ( 1 ) ( 2 , , k I t s s t p i i i est i ∆ + + = ∆ ε ,
where εi,2 is a small positive constant.
Step 5: Tuning tracking accuracy
Assume that λi,j are the root of the characteristic
polynomial ,1 2 1 , 1 , i n n i n n i s c s c c i i i i + + + − − − L , and i n j ij ij i z c ˆ β~ 2 , , ≤
∑
= . One can obtain the upper-bound of tracking error as + ∏ ≤ − = i i i j i n j i k e i β β λ ~ 1 , 1 1 .There are three ways to improve the tracking precision. One is to reduce the value of βi, which can be done by reducing the value of εi,2. The second way is to
decrease the value of βi
~
, this can be done by reducing the value of εi,1, estimating more higher order derivative of ζi,1, or assigning the eigenvalues of Ao,i so that they are far away from the imaginary axis. In practice, however, εi,1 and εi,2 cannot be arbitrarily small in order to prevent noise enhancement. The third way is to increase the values of
j i,
λ ,j=1,2,L,ni−1. In general, the desired tracking
accuracy can be achieved in this way, but it may increase the magnitude of control input.
四、數值範例
Consider the following nonlinear system
− = + − − + − − − − + − − + = 3 2 2 1 5 2 2 5 2 5 2 5 2 3 4 3 5 2 5 2 3 4 3 3 2 2 1 0 2 0 0 0 1 1 2 2 2 4 ) ( 2 2 x x x x x x x x x x x x x x x x x x x x y d u x&
where d =
[
−0.1sint+sinx2 0.1cost −0.2x3sint]
T u x t 0.01 5 2 cos 2 .0 and yd =
[
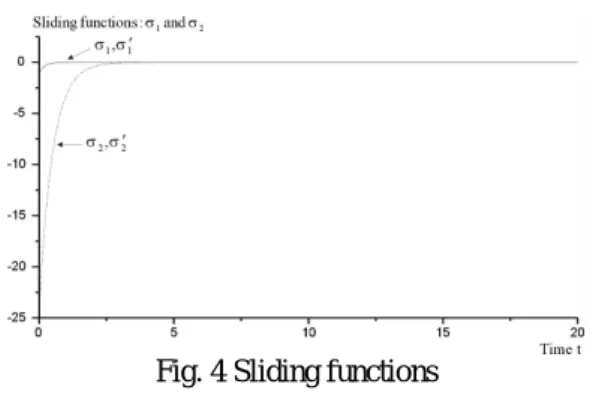
sint cost]
T . The simulation results are shown from Fig.1 to Fig. 4. It is also shown in the figures that the proposed controller is robust as disturbances being two-fold increase for10 ≥
t . From these results, one can see that there is almost no chattering phenomenon, and the controller can achieve very good tracking accuracy.
Fig.1 Tracking error e1 and e1′
Fig.2 Tracking error e2 and e2′
Fig. 4 Sliding functions
五、結論
A simple control scheme with perturbation estimation processes embedded is successfully proposed for a class of MIMO nonlinear mismatched perturbed systems for solving robust tracking problems. The advantages of the proposed control scheme are as follows: 1. The proposed controllers have the ability of self-adjustment to cope with the large variations of perturbation. 2. The tracking accuracy as well as robustness of system's stability can be maintained at the same time by the proposed control scheme even the perturbation becomes very large compared to its original value, or the perturbation changes abruptly. 3. The chattering phenomenon is further alleviated than those of traditional SMC in which only boundary layer controllers were used. 4. The state-space representation of plant need not be transformed into canonical or regular form beforehand for designing the controllers. 5. The knowledge of upper-bounds of perturbations as well as perturbation estimation errors is not required. 6. In general the desired tracking precision can be always achieved by adjusting the design parameters of controller.
六、計劃成果自評 本 研 究 內 容 與 原 計 劃 可 說 是 幾 乎 100%相 符。此控制器的優點如下: 1. 設計前不需要知道系統擾動的上界。 2. 可以有效減少顫動現象。 3. 可以經由調整設計參數來達到所要之追蹤 精準度,同時亦能夠保持系統穩定的強韌 性。 4. 系統的數學模型不需要轉換為典型式 因此,本計劃所提出的控制架構可適用於更多的系 統。 參考文獻
[1] J. Y. Hung, W. Gao and J. C. Hung, “Variable Structure Control: A Survey,” IEEE Trans. Ind. Electron., Vol. 40, No. 1, pp. 2-22, 1993.
[2] K. S. Yeung, C. C. Cheng and C. M. Kwan, “A unifying design of sliding mode and classical controllers,” IEEE Trans. Automat. Contr., Vol. 38, No. 9, pp. 1422--1427, 1993.
[3] G. C. Verghese and B. Fernandez R. and J. K. Hedrick, “Stable, robust tracking by sliding mode control,” Syst. Control Lett., Vol. 10, pp. 27-34, 1988.
[4] Y. C. Chen and P. L. Lin and S. Chang, “Design of output tracking via variable structure system: for plants with redundant inputs,” IEE Proc. D, Vol. 139, No. 4, pp. 421-428, 1992.
[5] S. H. Z&ak and S. Hui, “On variable structure output feedback controllers for uncertain dynamic systems,” IEEE Trans. Automat. Contr., Vol. 38, No. 10, pp. 1509--1512, 1993.
[6] H. Elmali and N. Olgac, “Sliding mode control with perturbation estimation (SMCPE): a new approach,” Int. J. Contr., Vol. 56, No. 4, pp. 923--941, 1992.
[7] H. Elmali and N. Olgac, “Satellite attitude control via sliding mode with perturbation estimation,”
IEE Proc.-Control Theory Appl., Vol. 143, No. 3, pp. 276-282, 1996.
[8] J. J. Slotine and S. S. Sastry, “Tracking control of nonlinear systems using sliding surfaces, with application to robot manipulators,”Int. J. Control, Vol. 38, No. 2, pp. 465-492, 1983.
[9] J. J. Slotine, “`Sliding controller design for nonlinear systems,” Int. J. Control, Vol. 40, No. 2, pp. 421-434, 1984.
[10] K. D. Young, V. I. Utkin and U&&.O&&zgu&&ner, “A control engineer's guide to sliding mode control,”
IEEE Trans. Contr. Sys. Tech., Vol. 7, No. 3, pp. 328-342, 1999.
[11] S. K. Spurgeon and R. Davies, “A nonlinear control strategy for robust sliding mode performance in the presence of unmatched uncertainty,” Int. J. Control, Vol. 57, No. 5, pp. 1107-1123, 1993.
[12] B. Drazenovic, “The invariance conditions in variable structure systems,” Automatica, Vol. 5, No. 3, pp. 287-295, 1969.
[13] S. Hui and S. H. Z&ak, “Robust control synthesis for uncertain/nonlinear dynamical systems,”
Automatica, Vol. 28, No. 2, pp. 289-298, 1992. [14] S. N. Singh and A. R. Coelho, “Nonlinear control
of mismatched uncertain linear systems and application to control of aircraft,” Journal of Dyna. Syst., Meas., and Contr., Vol. 106, pp. 203-210, September 1984.
[15] Sandeep, “Deterministic controllers for a class of mismatched systems,” Journal of Dyna. Syst., Meas., and Contr., Vol. 116, pp. 17-23, March 1994.
[16] T. L. Liao, L. C. Fu and C. F. Hsu, “Output tracking control of nonlinear systems with mismatched uncertainties,” Syst. and Contr. Letters, Vol. 18, pp. 38-47, 1992.