I-Shou University Institutional Repository:Item 987654321/11235
57
0
0
全文
(2) 無線感測網路自我選擇路由改善之研究 An Improvement of Self-Selective Routing Protocol in Wireless Sensor Networks. 研究生:柯仲鴻 指導教授:陳啓彰 博士. Student:Jung-Hung Ko Advisor:Dr. Chi-Chang Chen. 義守大學 資訊工程研究所 碩士論文. A Thesis Submitted to Department of Information Engineering I-Shou University in Partial Fulfillment of the Requirements for the Master degree in Information Engineering July 2008 Kaohsiung, Taiwan, Republic of China. 中 華 民 國 九 十 九 年 七月.
(3)
(4) 無線感測網路自我選擇路由改善之研究 An Improvement of Self-Selective Routing Protocol in Wireless Sensor Networks. 研究生:柯仲鴻. 指導教授 :陳啓彰 博士. 義守大學資訊工程究所. 摘要 本文主要探討的是針對無線感測網路路由協定-自我選擇路由協定 (Self-Selective Routing)[1]的改善。在自我選擇路由協定中,任兩點要彼此 傳輸時,無須由來源點選定及記錄路徑作為傳輸,只需在兩點之間的感測 節點建立跳躍數(hops)。來源點要傳送訊息給目的端時,利用所建立的跳躍 數,發出廣播訊息由附近節點有離目標最近的來負責傳送,此代傳點為任 意選擇,由最快回覆確認訊息(acknowledgement)感測節點來作代傳的動 作,之後重覆同樣的步驟直到封包到達目的端。 在自我選擇路由協定中,感測節點可以節省記憶體空間儲存路由表 (routing table)且無需對路由表的維護,在選擇代傳節點時具有容錯能力 (Fault-tolerance),能及時替換至可用的節點來接替封包的傳送,以及無需座 I.
(5) 標定位的資訊。 本文針對SSR協定在初期尋找目標點所使用的泛播方法加以改善。我們 觀察到在SSR協定下,感測節點均勻的佈署在感測區域中,任二點傳送訊息 實際所使用的路徑接近於此二點直線附近,對於其它最偏遠區域的節點毫 無使用到。所以我們要在初期階段局限泛播範圍,而我們的方去就是對網 路的所有節點建立區塊(zone),利用區塊去局限泛播的傳送範圍,排除不必 要區塊的節點接受及傳送訊息,以達到節省能量的目的。 關鍵字:自我選擇路由,泛播機置,無線感測網路,路由協定. II.
(6) An Improvement of Self-Selective Routing Protocol in Wireless Sensor Networks Student:Jung-Hung Ko. Advisor:Dr.Chi-Chang Chen. Department of Information Engineering I-Shou University. Abstract In the thesis we discuss the routing protocol in wireless sensor networks and improve the self-selective routing protocol(SSR). In self- selective routing protocol, if any two nodes would like to send packets to each other, the source node does not need to select and store routes for sending data. What source node needs to do is to build hop counts for the nodes between the source node and the destination node. When the source node wants to send messages to the destination node, it can broadcast messages, and the node which has the smallest hop count from the destination node would relay the messages. Then, repeat the same steps until packets are sent to the destination node. SSR’s benefits lie in its low overhead (SSR does not require explicit route maintenance or node location information) and fault-tolerance, since packets are received over all links of the sender and therefore have a high probability of reaching the best available neighbor in each transmission. The purpose of this thesis is to improve the flooding method in the SSR’s initial phase. We found out that when sensor nodes are deployed in the sensing area uniformly, the actual path that whose any two nodes used to send messages is close to the straight line between source node and destination node. For other nodes which are far away from source node and destination node would not be used. So, we want all nodes to build zones to confine flooding scope in SSR’s initial phase, and we can exclude those unnecessary nodes to receive and send messages for saving power. Keywords: Self-Selective Routing, Flooding Mechanism, Wireless Sensor Network, Routing Protocol. III.
(7) 目錄 摘要.....................................................................................................I Abstract...........................................................................................III 目錄..................................................................................................IV 圖目錄............................................................................................. VI 表目錄.......................................................................................... VIII 第一章 緒論..................................................................................... 1 第一節 無線感測網路的簡介…………………….….……...……….. 1 第二節 無線感測器硬體的架構………………….….……...……….. 2 第三節 無線感測網路的特性……………………….……....……….. 4 第四節 感測器網路應用潛力…………………….….………...…..… 4 第五節 論文架構…………………………………….….……...…..… 6. 第二章 相關研究 ........................................................................... 7 第一節 無線感測網路通訊………………………..….……...………. 7 第二節 泛播機置及研究動機…………..…….….……...………. 13 第三節 研究背景……..………………………….….……...……… 14 第四節 初始化路徑問題……………...……………..……....…… 19. 第三章 泛播機置改善 ................................................................. 21 第一節 建立跳躍數………………………………………....………. 21 IV.
(8) 第二節 區塊建立…………………………………….………………. 22 第三節 限制泛播傳送範圍………………………………………..…. 23. 第四章 實驗結果與分析............................................................... 27 第一節 SENSE 簡介…………………………………………………… 27 第二節 模擬分析………………………………….……………..…… 31 第三節 特殊情況下的改善模擬……………………………...……… 38. 第五章 結論................................................................................... 44 參考文獻......................................................................................... 45. V.
(9) 圖目錄 圖 1.1 感測器.................................................................................................... 2 圖 1.2 感測器硬體構造及功能......................................................................... 3 圖 2.1 SSR 使用成本指標傳送....................................................................... 15 圖 2.2 SSR 演算法........................................................................................... 17 圖 2.3 (a)SSR 目標請求封包(b)SSR 目標回覆封包...................................... 17 圖 2.4 (a)在節點A與B的正常通訊情形下(b)由於節點C與D之間的通訊擁 擠,節點A與B之間的封包傳送會自動迴避擁擠路徑……..………...... 19 圖 3.1 佈置感測節點及 x,y 匯集點,匯集點位於左上及右上角 ….….... 22 圖 3.2 (a)建立與 x 匯集點的跳躍數(b)建立與 y 匯集點的跳躍數(c)綜合二種 跳躍數分成的區塊,同顏色屬同一區塊(d)標示 x 區塊及 y 區塊的範 圍 ..........................................................................................................…. 23 公式(1) ........................................................................................................... 24 圖 3.3 區塊(4,9)和區塊(9,6)內泛播範圍 ............................................. 24 公式(2) ........................................................................................................ 25 圖 3.4(a) 使用原本規則的限制範圍(b)修改規則後的限制範圍 …......... 26 圖 4.1 sensor 結構 .................................................................................... 30 圖 4.2 通訊通道 ......................................................................................... 30 圖 4.3 能量消耗平均................................................................................... 32 VI.
(10) 圖 4.4 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=392, Dst=52(b) Src=34,Dst=206 (c) Src=397,Dst=286 分別為來源點與目標點 在距離 60-70 公尺的傳輸路徑......................................................... 34 圖 4.5 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=19, Dst=494(b) Src=443,Dst=358 (c) Src=28,Dst=172 分別為來源點與目標點 在距離 120-130 公尺的傳輸路徑..................................................... 36 圖 4.6 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=331, Dst=344(b)Src=340,Dst=468(c)Src=353,Dst=500 分別為來源點與目標點 在距離 180-200 公尺的傳輸路徑 ................................................... 38 圖 4.7 平均跳躍數 ........................................................................... 39 圖 4.8 平均無接收封包節點數 .......................................................... 39 圖 4.9(a)(b)(c)(d) (e)左為使用區塊泛播的 SSR 協定,右為原本 SSR 協 定.................................................................................................. 42. VII.
(11) 表目錄 表 1.網路模擬參數......................................................................... 31 表 2.能量消耗設定......................................................................... 31 表 3. 二點距離為 60-70 公尺傳輸................................................. 32 表 4. 二點距離為 120-130 公尺傳輸............................................. 34 表 5. 二點距離為 180-200 公尺傳輸............................................. 36 表 6. 區塊擴增後的比較............................................................... 38. VIII.
(12) 第一章 緒論 第一節 無線感測網路的簡介 無線網路最早是由美國加州柏克萊大學(UC Berkeley)的一項研究計 劃,開發人員採用微機電系統(MEMS)技術研究出一種體積很小(與一般硬 幣大小相似)的感測器,稱之為「智慧塵埃(Smart Dust)」。這項計劃是由美 國國防部高等研究計劃局(DARPA)所資助,原先的目標是應用在軍事上。 無線感測網路(Wireless Sensor Network,簡稱WSN)通常是由體積小、 低成本、低耗電,具有簡單的計算能力以及短距離的傳輸範圍的感測節點 彼此互相連結而形成的網路。此類感測節點可大量放置於環境中形成一個 感測器網路以便進行偵測任務,其放置的密度有時可達一立方公尺20個 [2]。而這些感測器工作需要靠電池維持,可在無人看管下自行作業,壽命 可維持數週至數月,通常運用在不理想的環境下代替人力來執行。 由於無線感測器在隨意分佈的情形下,每個感測器無法得知自己與其 他感測器的相對位置,因此感測器網路必須利用自我組態(Self -Organization) 的協定,在感測器之間自動發展出一個通訊網路,讓網路區域中的所有感 測器所感測的資料,皆能透過自我組態所發展的網路,將資訊傳送到無線 資料蒐集器。. 1.
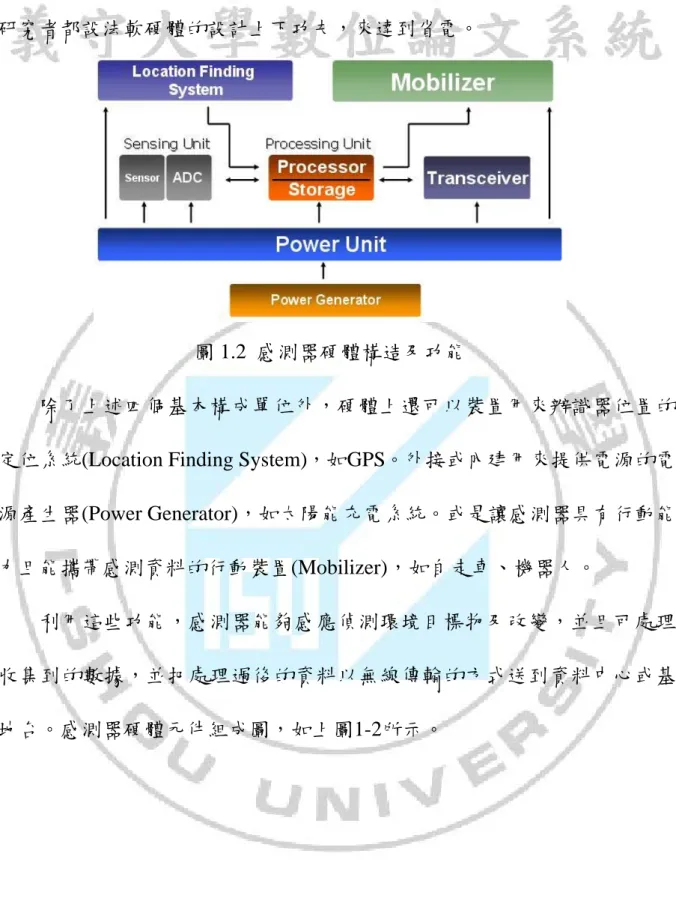
(13) 圖 1.1[3] 感測器. 第二節 無線感測器硬體的架構 無線感測器節點硬體組成主要包含四個主要的元件[4-5]: 1.感測單元(Sensing Unit)包含二個部份: (i)感測元件(Sensor) (ii)訊號轉換元件(Analog-to-Digital Converters) 2.處理單元(Processing Unit) 包含二個部份: (i)儲存元件(Storage). (ii)處理元件(Processor). 3.傳輸單元(Transceiver Unit) 傳輸單元主要負責連接感測器與感測器間的溝通,或是把感測器的資料傳 送到基地台。傳輸介質可以有紅外線、無線電波、甚至是光纖媒介等,配 合環境及應用的不同,可以選擇不同的傳輸介質。 4.電源單元(Power Unit) 電源單元負責感測器所有單元的電力能量,無論是任何一個功能運作都必 須使用電量,是非常重要的單位。通常感測器電力來自於電池,因此許多 2.
(14) 研究者都設法軟硬體的設計上下功夫,來達到省電。. 圖 1.2 感測器硬體構造及功能 除了上述四個基本構成單位外,硬體上還可以裝置用來辦識器位置的 定位系統(Location Finding System),如GPS。外接或內建用來提供電源的電 源產生器(Power Generator),如太陽能充電系統。或是讓感測器具有行動能 力且能攜帶感測資料的行動裝置(Mobilizer),如自走車、機器人。 利用這些功能,感測器能夠感應偵測環境目標物及改變,並且可處理 收集到的數據,並把處理過後的資料以無線傳輸的方式送到資料中心或基 地台。感測器硬體元件組成圖,如上圖1-2所示。. 3.
(15) 第三節 無線感測網路的特性 無線感測網路有許多特性,如下[4]: 1.低製造成本 (Low Cost) 2.低功率 (Low Power) 3.低傳輸速率 (Low Data Rate) 4.傳輸距離短(Short Distances) 5.感測器體積小且能量有限(Small Size and Limited Energy) 6.多功能的偵測節點(Multifunctional Sensor Nodes) 7.有容錯功能(Fault Tolerance). 第四節 感測器網路應用潛力 由於感測器網路的應用潛力廣泛,感測器網路已被預測將是繼現今個人電 腦能直接融入人類生活的新興科技。以下我們分為五大類加以描述其應用 及潛力[6]: 1. 軍事應用 · 在友軍的人員、裝備及軍火上加裝感測器以供識別。 · 監控戰場上的狀態。 · 將感測器投擲於敵軍陣營中,希望能完成偵察任務。 · 偵察及判定核子、生物和化學攻擊。 2. 環境應用 4.
(16) · 將幾百萬個感測器佈署於森林中,以對任何火災地點的判定提供最 快的訊息。 · 感測器網路能提供遭受化學污染的位置及檢定出何種化學污染 · 水災判定。 · 監測空氣污染、水污染及土壤污染。 3. 健康應用 · 將感測器網路佈署於房子裏及人的身上,而達到遠距監測人體各項健康 數據及人的各項行為的目的。 · 感測器可放在病人或藥師身上,如此錯誤的藥物處方或是病人拿錯藥的 機會可以降低。 4. 家庭應用 將含有起動器的感測器網路佈署於家中,可以讓人們在遠方或在家裡經由 網際網路作許多家事。 5. 其他商業應用 無線感測器網路也有許多商業上的應用,例如: · 傳統辦公室的空調系統是中央控制,因此有些地方可能很冷,有些地方 卻很熱。使用無線感測器網路,各個角落的感測器可以知道當時的環境狀 況,進而要求控制當時的氣溫或空氣流動。 · 監控車輛或商品的失竊。. 5.
(17) 第五節 論文架構 本論文計劃書主要分成五個部分,分別為: 第一章 緒論 描述無線感測網路簡介 第二章 相關研究 針對研究背景作相關的文獻探討及研究動機 第三章 泛播機置改善 描述對傳統泛播機置修改的方法 第四章 實驗結果與分析 使用 SENSE 模擬網路傳輸,將數據統計和顯示網路傳輸情形並 分析其結果。 第五章 結論 描述對新的泛播方法及實驗過程的結論,並探討可能遇到的的 問題及未來展望。. 參考文獻 本論文計畫書所提及之相關探討文獻,則附錄於此。. 6.
(18) 第二章 相關研究 第一節 無線感測網路通訊 1.資料及網路通訊模式[7] 在無線感測網路中,資料傳輸的工作是對網路能源消耗最大的部分。 為了與其它感測器或基地台通訊,感測器必需經過無線傳輸的技術來做發 送及接受訊息。由於感測器本身的傳輸範圍限制及為節省能源消耗,感測 器必需透過多躍式(multi -hop)來進行資料的傳送,目前大多感測器的設計 將能量消耗目標定為-20dbm[8]。研究學者除了在感測器上設計低功率電 波收發器來達到降低能源的消耗,也有研究顯示出,讓感測器進入睡眠狀 態,對於收發器才能達到較高的能量節省,但頻繁的在睡眠狀態和結束睡 眠狀態中轉換,所消耗的能源也是十分可觀[9]。因此,安排睡眠的機置也 是一個重要的研究課題。. 在感測網路的通訊概念上在可以分類為二種:應用和基礎建置[7]: (i)應用(application)通訊: 主要是將感測器所偵測到資料回傳給基地台,此類通訊模式多為端 點對端點(end-to-end)的方式,而在資料的收集及處理的方式又可分為合作 (cooperative)及非合作(non-cooperative)二種,合作型主要是多個感測器將 其收集的資訊先行處理,並設法滿足基地台的觀測者或使用者的要求,然. 7.
(19) 後才將結果送回基地台;非合作,則相反。合作型通訊已被證明較能夠提 昇感測器網路的效能並有效降低能源消耗[10-11]。 (ii)基礎建置(infrastructure)通訊: 主要是發生在感測器網路需要裝置(configure),維持(maintain)和最佳 化(optimize)網路時。由於工作需求,在開始感測網路建置時,感測網路會 依據不同的演算法進行調整。例如根據路由協定,感測器可能需要與基地 台建立路徑;安排睡眠的時程;建立進行資料聚合的節點等。此類通訊會 增加網路效能的額外通訊負擔。. 2. 資料傳送(data delivery)模式[7] 感測器偵測環境並將結果送回基地台的方式大致分為四類: (i)連續型模式 感測器在固定的時段將偵測到的資料傳回給基地台。 (ii)事件驅動型模式 當要偵測的事件發生時,感測器才將資料回傳給基地台。 (iii)觀測者啟動模式 在基地台的觀測者也可送出指令或需求至感測網路,感測器則依據此指令 或需求回傳資料。當每一感測器收到此詢問後,便判斷偵測到的數值。若 偵測到的資料是詢問所需要的,則會回傳相關訊息包括自己的位置。 (iv)混合型資料傳送模式 8.
(20) 以上三種型態皆有可能同時出現在同一個感測器網路,則稱之。. 以上所談及的為應用方面的資料傳送方式,而網路實體層(physical layer)的資料傳送方式可分為以下三種: (i)泛播(flooding): 泛播方式傳送資料為感測器廣播欲傳送的資料自己傳送範圍內的所有 鄰居,所有鄰居再將此資料廣播給它們的鄰居,直到基地台收到資料或廣 播次數到達上限為止。這種傳送資料方式不受網路拓樸動態的改變而受影 響,但會有大量重複資料在網路中傳送,對網路的能量消耗不小。 (ii)單播(unicast): 感測器和基地台直接通訊(可能使用多躍式路由協定)或和叢集頭 (cluster- head)一對一的通訊,此類方式稱為單播。 (iii)群播(multicast) 在群播方式中,鄰近感測器依應用需求建立團體,而資料傳送可直接 傳給自己團體中每一個成員。 研究顯示因為感測器不需建立及維護路由路徑至基地台,對於無線感 測器網路,泛播為一較佳選擇的資料傳送方式。 3. 網路架構[7] 依據感測器及基地台是否移動,網路架構可分為靜態(static)及動態 (dynamic)兩種。於靜態感測器網路中,感測器及基地台皆不移動。這類型 9.
(21) 的感測器網路經常會進行最佳化網路的結構, 因為最佳化的額外能量消 耗通常遠小於網路最佳化後所降低的能量損耗。而靜態感測器網路的最佳 化演算法也較不複雜,因此所消耗的能量也較少。動態感測器網路的最佳 化演算法相對而言較為複雜,因而所消耗的額外能量較多。同時當網路架 構改變後,網路常需再次進行最佳化,此時不但網路的偵測功能暫停且必 須消耗額外 能量,因此動態感測器網路的最佳化與總消耗的額外能量必 須加以比較考量。 不論是靜態或動態感測器網路,為了節省能量消耗,資料融合是無可 避免的功能。為能進行資料融合,一定數量的鄰近感測器會形成一個小組 進行資料融合。因此感測器網路可看成一群一群感測器的組成。更進一 步,多個群組可能再組成更大的群組,整個網路形成階層式的架構[11]。 4.路由協定 在無線感測網路,由於網路變化性大,為節省能源和增加效能,在資 料回傳給基地台之前必須先加以處理,此過程通常稱為資料聚集(data aggregation)或資料融合(data fusion),而在Ad Hoc網路較著名的路由協定 中,如DSR(Dynamic Source Routing)[12]及AODV (Ad Hoc On-Demand Distance VectorRouting)[13],因無支援資料融合的功能,而無法有效運用於 無線感測網路上。 在無線感測網路低能量、低記憶體及無共通的識別證等特性,大多數. 10.
(22) 路由協定以降低能量消耗列為首要考量,以下列出幾個比較重要的協定: (i)SPIN(Sensor Protocols for Information via Negotiation)[14]主要是解決因泛 播(flooding)傳送所導致的資料大量重複傳送的缺點。當網路中任一節點要 傳送資料給它的鄰居時,它先廣播一個稱為超資料(meta-data)的資料描述符 號(information descriptor)給它的鄰居。而它的鄰居先比對此超資料是否已經 接收過並存於資料庫中。如果沒有,則利用事先設計的規則(中提供數種 針對不同的應用所設計的規則)通知傳送超資料的節點將真正資料傳送給 它們。 (ii)直接擴散(directed diffusion)[15]是一個以資料為中心(data-centric)的方 法。此協定的特色是每一節點不以位址來區分,而是以它所感測到的資料 來定址。在此協定中,觀測者首先送出一個詢問(query),然後此詢問將透 過網路中其它節點擴散出去。當任何一個節點擁有滿足此詢問的資料時, 它便將本身的資料傳回基地台。因為直接擴散協定傳送詢問及感測器回傳 資料皆是區域性交換資訊(即鄰居們互相交換資訊),因此這個協定十分適合 動態網路架構,而且每一個感測器不需儲存太多路由資訊。 (iii)LEACH(Low-Energy Adaptive Clustering Hierarchy)[16]是一個可以應用 於直接傳送或多重跳躍的路由協定。此協定主要是將多個鄰近的感測器組 成一個個叢集(Cluster)。每個叢集中再經由一定的程序選出一個叢集頭 (cluster head)。叢集頭則負責將此叢集中其它感測器的資料加以整理或進行. 11.
(23) 資料融合後傳送給基地台。如此可避免每一個感測器皆將資料傳回基地 台,因而消耗大量的能源。至於選擇叢集頭及如何形成叢集的程序主要是 以節省能量及分散式的方式進行。其中最重要的規則是於一定時間內讓每 個感測器能夠消耗差不多的能量以延長整體網路的有效工作期間。LEACH 的架構非常適合進行資料融合,因此可更進一步節省能量。 (iv)GeRaf(Geographic Random Forwarding)[17]GeRaF假設每個感測器知道 自己及基地台的位置。當傳送資料前,感測器先廣播自己的位置(及基地台 的位置)給它的鄰居。如果有鄰居的位置比它還要靠近基地台,這些鄰居將 依事先製定好的規則回應給此感測器。如果此感測器成功收到一個鄰居的 回應,它便將資料傳給這個鄰居。此鄰居再依同樣的方式將資料前傳至下 一個距離基地台更近的感測器。GeRaF的好處是只需要每個感測器知道自己 的位置,而此訊息通常是一個感測器網路所必備的。同時因為路徑並不需 於傳送資料前先尋找及設定,因此GeRaF非常適合網路架構經常變動的應 用,也同時適合任何睡眠機制。再加上此協定所提出的降低碰撞機會的 MAC(Medium Access Control)系統,它於能量消耗上將大幅降低。 (v)通道進接控制(Medium Access Control,MAC)主要是解決共用通道的使用 權問題。一般而言,無線感測器網路的通道進取控制必須考量如何降低能 量的消耗,亦即如何減少碰撞的次數。對於感測器而言,無線傳輸所消耗 的能量已被證實為最主要的能量消耗部份。. 12.
(24) (vi)S-MAC[18]主要是將睡眠機制置入 IEEE 802.11 的 MAC 系統中以節省 能量的消耗。設計一個有效率的睡眠排程(sleeping schedule)為 S-MAC 的 主要節省能源的方法。此排程安排互為鄰居的感測器同步建構一個睡眠排 程。此方法的缺點為同步維護是一個經常性的額外消耗能源的裝置。. (vii)睡眠排程演算法是最有效節省能源的一個方式之一。但如何安排睡眠排 程而不影響感測器網路的正常運作十分重要。尤其此排程不能影響感測器 網路感測的功能,亦即網路的感測涵蓋範圍不能降低太多,否則此網路便 無法正常運作。. 第二節 泛播機置及研究動機 由於無線感測器網路具有分散性、動態分佈及多步傳輸的特性,在訊 息傳送上常會使用到泛播。在網路拓樸具有連接性的情形下,此方法無需 藉由路由表幫助也能保證所有節點都接受到封包。雖然泛播方法簡單且保 證一定可以找到目標點,但也因為這樣造成節點要多次檢查封包是否要傳 送,對於感測器的能量會造成過多的耗損,且每廣播的區域貢獻度未必會 有。在無線網路有許多的路由協定會在搜尋路徑上使用到泛播(Flooding)機 置,如DSR、AODV、ZRP [19],、LAR [20],使用在搜尋感測器如Directed diffusion及服務搜尋SPIN-IT[21]。 [22]提出在MANET (mobile ad hoc network) 環境下使用泛播方式進行 13.
(25) 訊息廣播,會產生冗餘(redundancy)、競爭(contention) 及碰撞(collision) 等 因素造成廣播風暴問題,影響網路效能。 - redundancy: 當節點第一次收到廣播訊息並轉播該訊息時,其傳輸範圍內 所有節點可能有些已接收過此訊息,而造成不必要的多餘轉播。 -contention: 當一個節點傳送廣播訊息,其週遭的鄰居節點幾乎同時收到、 且決定要轉播該訊息;由於無線網路鏈接頻寬共享之特性與轉播時間十分 相近,將造成明顯地傳輸競爭而導致傳輸延遲。 -collision: 由於幾乎同時轉播的現象,將導致碰撞發生,使得接收端無法正 常收到該訊息,造成傳輸頻寬的浪費。同時,因為廣播封包傳送無法藉由 acknowledgement機制來確認傳輸成功與否,將無法確認轉播成功與否,導 致廣播覆蓋率的降低。. 第三節 研究背景 A Self-selection Technique for Flooding and Routing In Wireless Ad-hoc Networks (SSR) [1] 傳統的多重跳躍路由 multi-hop routing 是使用路由表(routing table), 指 定 鄰 居 傳 送 封 包 到 達 目 標 點 。 較 著 名 的 例 子 包 括 MintRoute [23], Directed Diffusion , and AODV.這些仿效傳統有線網路通訊的基礎方法需 要固定維護自己的鄰居狀態來提供路由的決策。此外,對於測量無線連結 條件技術也是需要的。通常,這些路由協定需要多餘負擔來提供典型的無 線感測網路作業條件,尤其是支援容錯機制下更為顯著。 14.
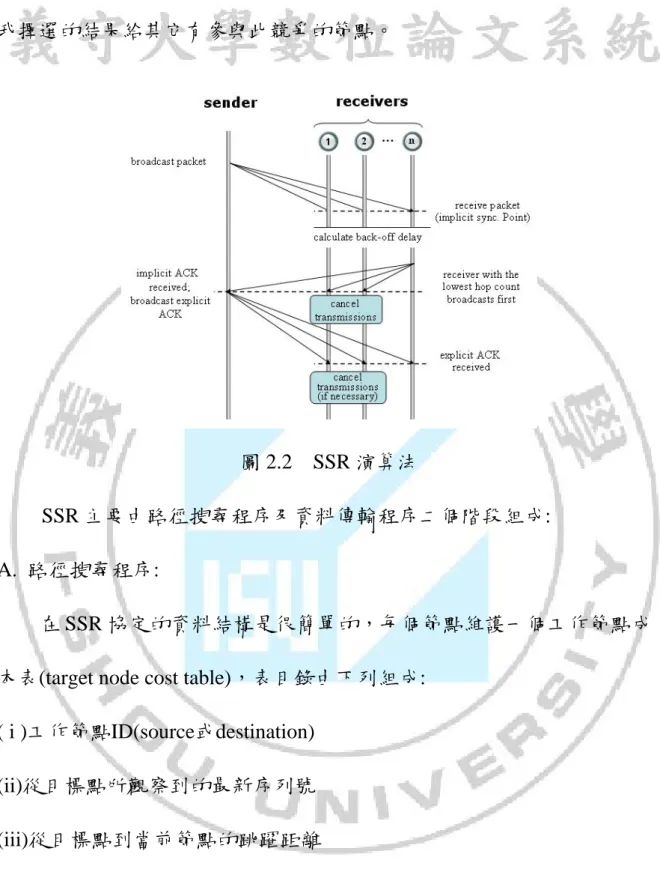
(26) 大部分無線網路使用廣播天線來通訊,不像典型的有線網路點對點通 訊。對於多重跳躍路由,SSR具有使用廣播通訊而不用仿效點對點的通訊的 特色。因此,在SSR,一個感測節點傳輸一個封包不需要使用傳送 表 (forwarding table)目錄來指定某一個鄰居來傳送封包到目標點。取而代之的 是由這些接受到廣播封包的鄰居中有離目標點最低成本(最小跳躍數)的節 點來自己選擇要負責往目標點接著傳送。這個概念說明圖2.1,用一個網路 平面梯度表示傳送封包以遞減的成本到達目標點,圖中被箭頭所指的點為 接受到廣播封包,只有最低成本中的一個點會往前傳送。. 圖 2.1 SSR 使用成本指標傳送. SSR較為突顯的特點包含容錯的特性,最佳路徑的選擇和擁塞的避免, 歸功於自我選擇的技術。自我選擇技術關鍵在於依靠三個廣播和一個 back-off延遲,如圖2.2。第一個廣播是在開始back-off延遲的時間隱式同步 點(temporal implicit synchronization points),而back-off延遲的使用是用來自 行選擇時找出最具期望特性的節點;第二個廣播是由擁有最短back-off延遲 的節點通知原先廣播的節點要接著往目標點傳送;第三個廣播為告知此自. 15.
(27) 我擇選的結果給其它有參與此競爭的節點。. 圖 2.2 SSR 演算法 SSR 主要由路徑搜尋程序及資料傳輸程序二個階段組成: A. 路徑搜尋程序: 在 SSR 協定的資料結構是很簡單的,每個節點維護一個工作節點成 本表(target node cost table),表目錄由下列組成: ( i )工作節點ID(source或destination) (ii)從目標點所觀察到的最新序列號 (iii)從目標點到當前節點的跳躍距離 路徑搜尋處理由二個階段組成,描述於下: 1) 目標請求階段: 當一個來源點想要送資料封包給目標點,而還尚未建立成本表目錄,. 16.
(28) 此時來源點會傳送目標請求(destination request, DREQ)封包經由泛播協定 及增加自己的序列號1。每個DREQ封包會有一個實際跳躍計數欄位記錄從 來源點到當前接收點的經過的跳躍數,如圖2.3(a)。. 圖 2.3 (a)SSR 目標請求封包(b)SSR 目標回覆封包 如果一個中繼節點從來源點收到一個 DREQ 封包,且尚未對此 DREQ 封包建立目錄,那麼節點將會產生新的目錄在目標點成本表包含來源點 ID、序列號及實際跳躍數欄位。若目錄已存在,目錄更新的情況可能在 (i) 當收到 DREP 封包的序列號是高於成本表內所包含的或者(ii)當 DREP 封 包內的實際跳躍數是低於成本表內所記錄的。 目標回覆階段: 目 標 點 在 收 到 一 個 新 的 DREQ 封 包 會 回 覆 一 個 目 標 回 覆 封 包 (destination reply, DREP) (如圖2.3(b))。這個封包的表頭包含和DREQ封包一 樣的欄位以及期望跳躍數欄位(expected hop count field),期望跳躍數欄位指 出此封包經由所期望的跳躍數距離回傳到來源點(這裡以本身離目標的跳躍 數-1為期望值)。目標點簡單的廣播DREP封包不需要指明下一個跳躍的節. 17.
(29) 點,而是利用已有的目標點成本表內的跳躍數,將跳躍數減1的值儲存到 DERQ封包內的期望跳躍數欄位。一偵測到DREP封包每個節點會先檢查此 封包的期望跳躍數欄位。 SSR協定的主要概念是藉著所測量的中繼節點到目標點的跳躍數目來驅動 back-off延遲。這個概念是根據節點有較靠近目標點的關係,應給予較大的 優先權去傳送封包高於離目標較遠的節點。藉由被動的聆聽所有封包和觀 察其實察跳躍計數欄位,一個中繼節點只知道目標點與自己的距離。. B. 資料傳輸程序 收到DREP封包,來源點可開始傳送資料封包給目標點。資料封包傳送 到目標點可以比照目標點傳送DREP封包傳送給來源點的方式,使用實際跳 躍計數欄位及自我選擇來傳送。然而,在收到任一個資料或DREP封包時, 接收節點會更新本身的目標點成本表內所符合該封包目標點的目錄。 SSR不太明顯的特點是它可自動避免擁塞。在密集的地區,節點也許因 過多的封包在MAC的佇列而必須等待。即使一個節點擁有大的MAC佇列被 分配到小的back-off延遲,極有可能無法像其它節點在較無擁塞地區那樣迅 速在自我選擇中選取自己。 圖2.4說明兩個模擬分別將封包傳送的實際路徑表示出來。圖2.4(a)描 繪出通訊由節點A傳送封包至節點B。圖2.4(b)一樣描繪出相同的網路,此外 再加節點C至節點D彼此的通訊。圖2.4(b)可看出,SRR傳送封包的環境是在. 18.
(30) 一個有擁塞的地區情形下。儘管增加了路徑長度於節點A至節點B,但端與 端之間的延遲是有可能下降的,因為在新路徑點和點之間每個跳躍延遲的 增加是小於原先較短的路徑。. 圖2.4 (a)在節點A與B的正常通訊情形下(b)由於節點C與D之間的通訊擁 擠,節點A與B之間的封包傳送會自動迴避擁擠路徑。. 第四節 初始化路徑問題 在SSR協定的目標請求階段,來源點要找到目標點,一開始會使用泛播 協定把目標請求封包傳送到整個網路的節點。所以,只要有不同對點要彼 此傳輸,來源點必會再以泛播方式將封包傳到整個網路。對於不同點每次 初始化路徑時,整個網路的節點都需要消耗很多能量來接收及廣播目標請 求封包,才能找到目標點。. 19.
(31) 我們發現感測節點在感測區域均勻分佈情形下,任兩點彼此通訊的路 徑通常是接近在兩點最短距離附近。如圖3.4,我們可以看到A點和B點實際 通訊的路徑幾乎是在A點和B點兩點相連的直線附近,而在整個感測範圍的 最左下及最右上部分節點是最不需要做A點及B點之間的代傳工作。在這二 部分的節點在節點A發送的目標請求封包時,是必須接收及廣播封包。因 此,我們希望節點在目標請求階段時,盡量把目標請求封包的傳送範圍縮 小到所需要範圍,節省不必要範圍的節點,以達到節省能量的目的。 在SSR協定下感測節點無需座標定位,而又要縮短廣播目標請求封包的 範圍,我們所提供的方法是將整個網路節點使用跳躍數分成多個區塊,每 個節點會記錄自己所屬的區塊,在需要傳送目標請求封包時,依所建立好 的區塊來限制封包傳送的範圍。接收到目標請封包節點若在需要的範圍, 會繼續廣播封包;否則,將丟棄此封包,停止廣播的動作。致於如何將網路 節點分多個區塊及限制傳送範圍的方法將在下個章節討論。. 20.
(32) 第三章 泛播機置改善 在執行我們改善的泛播方法前,我們 7 需要環境的一些設定,以利我 們執行泛播後結果的正確性。首先在一個方形感測範圍的兩個相鄰角落各 放一個資料匯集節點(x sink 和 y sink)。之後,我們在感測區域均勻的佈署 感測節點,感測節點需要達到一定的密度(在第四章中的模擬實驗中,我 們設定感測區域為 200 公尺*200 公尺,節點 500 個,節點傳送範圍 25 公 尺),否則會影響到之後區塊建立的完整性,在資料傳送時可能無法達到 最短路徑的傳送。在具備好需要的環境條件後,我們就可以開始執行我們 改善的泛播方法,步驟可分為下列(i)建立跳躍數(ii)畫分區塊(iii)限制泛播 傳送範圍。. 第一節 建立跳躍數 在所有節點都佈署好後,x 和 y 匯集點會分別廣播跳躍數建立封包, 封包內容包含匯集點 ID 及跳躍數欄位,在廣播前會在跳躍數欄位設為 1。在匯集點附近的感測節點收到此封包,會先查看封包內容並記錄封包 內的匯集點 ID 及跳躍數,之後將封包的跳躍數欄位值加 1 再廣播出去。 一直重覆相同步驟直到整個網路節點都接收到 x 和 y 匯集點的跳躍數建 立封包。如果接到相同匯集點 ID 的封包,而跳躍數與之前所記錄有所差 別,節點會去作比較,如果接收到的封包跳躍數比記錄的還要小,那節. 21.
(33) 點會更改原來所記錄的跳躍數,以求最近離匯集點的距離,並再廣播出 去;反之,丟棄此封包,不作任何動作。. 圖 3.1 佈置感測節點及 x,y 匯集點,匯集點位於左上及右上角. 第二節 區塊建立 在每個感測節點都記錄二種跳躍數值後,我們的區塊建立就是以 這二種數值來去畫分,每個節點會儲存此類訊息( x_hop, y_hop ),x 及 y 匯 集點的跳躍數一樣的節點會歸類為同一個區塊。圖 3.1 佈好所有感測節點 及 x 和 y 匯集點後,圖 3.2(a),圖 3.2(b)為分別建立與 x 和 y 匯集點的跳躍 數,每個節點就可以知道自己所屬的區塊,並且將自己區塊的資訊回傳匯 集點,以供後續來源點查尋目標點的區塊. 22.
(34) 圖 3.2 (a)建立與 x 匯集點的跳躍數(b)建立與 y 匯集點的跳躍數(c)綜合二種 跳躍數分成的區塊,同顏色屬同一區塊(d)標示 x 區塊及 y 區塊的範圍. 第三節 限制泛播傳送範圍 區塊建立完成後,當有一個來源點要找尋目標點傳送資料時,會先向 匯集點獲得目標點的區塊位置,然後自己再以泛播方式發送 DREQ 封包 並附上區塊範圍,而範圍的計算規則,如式子(1)。 xs 和 y s 代表來源點的 23.
(35) 區塊, xd 和 yd 代表目標點的區塊. Range flooding = x _ band [min( x s , xd ), max( x s , xd )] ∩ y _ band [min( y s , y d ), max( y s , y d )]. (1). 假設由 x 和 y 匯集點出發所得的最大跳躍數分別寫 C x 和 C y,定義由 x 匯集點所形成的條狀區塊分別為 x_band[1],x_band[2],…,x_band[ C x ], 而 y 匯集點所形成的條狀區塊分別為 y_band[1], y_band[2],...,y_band[ C y ] 若為連續區塊從 x_band[ n1 ]到 x_band[ n2 ],則表示成 x_band [ n1 ,. n2 ],其中 1≦ n1 , n2 <= C x , y_band[ m1 , m2 ]的定義和 x_band[ n1 , n2 ]類似。. 圖 3.3 區塊(4,9)和區塊(9,6)內泛播範圍 此 DREQ 封包傳送的地區最多延伸到所要的範圍外側邊緣。因為在邊緣 的節點會收到泛播範圍內的節點所廣播的 DREQ 封包,經過檢查後發現自 24.
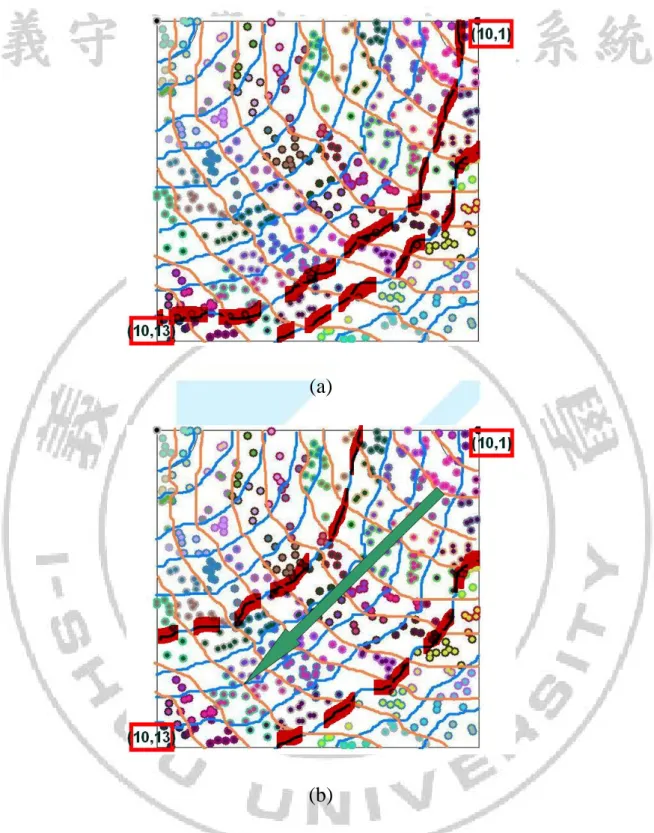
(36) 己並不屬於泛播的範圍,便丟棄封包,停止泛播範圍的擴散。 雖然上述方法在一般情形可用,但必須考量到另一種情況,因為畫分 的區塊是屬於扇形,當二點劃分的 x(or y)區塊差值差異較小例如(0≦△ x≦3)而 y(or x)區塊差異較大(△y>5)時,原本使用局限泛播的範圍將很 難包含二點直線上附近的節點,也就難達到最短的傳送路徑,如圖 3.4(a)。所以在這種情形下,我們必須修改包覆的範圍以獲得最短路徑的 節點,而我們的方法是在差異小的區塊再往內擴 n 區塊,修改公式(1)後 如下。其中ε、δ值將視感測區域大小和感測點的通訊範圍而定。在此模 擬設為ε=3,δ=5。 Range flooding = ⎧ x _ band [min( xs , xd ) − n, max( xs , xd )] ∩ ⎪ y_band[min( y , y ), max( y , y )] s d s d ⎪⎪ ⎨ ⎪ x _ band [min( xs , xd ), max( xs , xd )] ∩ ⎪ ⎪⎩ y_band[min( y s , y d ) − n, max( y s , y d )]. if Δx ≤ ε and Δy > δ , then n = ε − Δx. (2) if Δy ≤ ε and Δx > δ , th en n = ε − Δy. 圖 3.4(a)我們假計有來源點及目標點分別在區塊(10,13)及(10,1),使用公式 (1)後限制泛播的範圍為 x_band[10]和 y_band[1,13]所交集的地方,如圖紅 色虛線範圍內,會導致之後資料傳輸的路徑是繞較遠的路徑,而浪費傳輸 的能源。所以在這種情況必須使用公式(2)擴大傳輸範圍以涵蓋到最短路徑 的節點,如圖 3.4(b),限制泛播的範圍修改為 x_band[7,10]和 band[1,13]。. 25.
(37) (a). (b) 圖 3.4(a) 使用原本規則的限制範圍 (b)修改規則後的限制範圍. 26.
(38) 第四章 實驗結果與分析 我們實驗針對傳統泛播及我們分區塊的泛播方法在 SSR 協定上執 行,進行來源點與目標點的跳躍數建立及以此進行資料的傳輸情形作比 較,最後再將傳輸路徑以圖顯示出來觀察其結果。實驗中,二種方法在相 同的環境參數和節點下執行,隨機找尋二點作資料的傳送。此外為了要測 試我們所提出的方法具可行性,我們將二點的距離分別以近距離、中距 離、遠距離來劃分,近距離部分我們採用 60-70 公尺,中距離採用 120-130 公尺及遠距離採用 180-200 公尺為代表進行模擬。我們採用 SENSE(SEnsor Network Simulator and Emulator) [24]作為我們的模擬工具,下節將對 SENSE 作基本介紹。. 第一節 SENSE 簡介 SENSE 一個被證實有效的感測網路的模擬工具[24],它和一般感 測網路模擬工具相比有三個主要的特色:. -延伸性(Extensibility):使用 component-based 發展的模擬可具備延伸網路 模擬架構的能力。component-port 模組可以讓模擬的模組且有延伸性: 在彼此可相容的情況,一個新的元件可取代一個舊的元件,且繼承是 不需要的。模擬元件類別(class)可以使模擬引擎延伸:進階的使用者可 以自由的發展新的模擬引擎來滿足他們的需求。 27.
(39) -重用性(Reusability):除去模組之間的依賴性可使模組具重複使用性。如 果在介面和 semantics 滿足其它使用者的需求,對於某個特定模擬發展 的元件是可以再被利用的。另一方面具可重複使用性是在使用 C++ template。一個元件通常被宣告成一個 template 類別,如此一來,可以 使用此元件處理不同的資料型態。. -擴展性(Scalability):提供平行化處理。在 SENSE 裡,平行處理的模擬引 擎只能處理具有相容性部件組成的元件。如果預設的循序模擬引擎 (sequential simulation engine) 可以符合使用者的需求,那麼模組庫的元 件將可再重複使用。. SENSE 是建立在 COST 上,而 COST 是由一些類別(classes)組成的函 式庫,其特色在於離散事件模擬(discrete event simulation)的發展使用 CompC++ , 一 個 由 C++ 延 伸 出 的 component-oriented 。 COST 採 用 component-oriented 的技術,一個離散事件的模擬可以被視為一個多元件 的集合,藉由通訊埠交換訊息來彼此相互作用。此外,模擬還包含一個模 擬引擎,負責同步處理元件。元件有一個或多個事件處理程序,針對每個 事件的到達執行相對應的動作。事件可以分成二類,同步事件,是在訊息 由自己的鄰近元件經輸入埠(input port)傳達給自己; 另一個則是非同步事. 28.
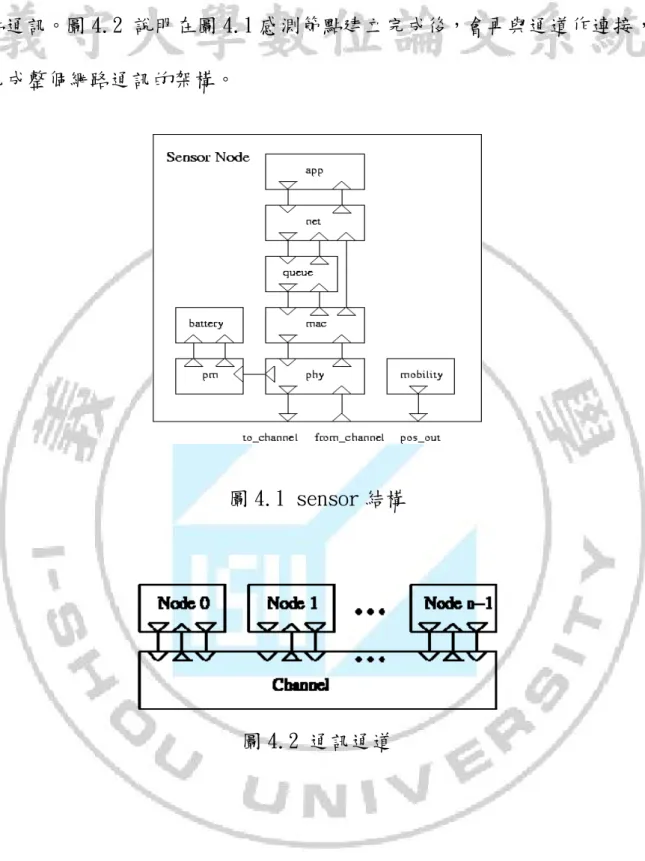
(40) 件,非同步事件是與計時器相連的,一個特別種類的埠介於元件和模擬引 擎。元件經由計時器接收和排程非同步事件。. SENSE v3.03 已測試過可在下列作業系統上執行,而我們實驗是在 Windows XP 上搭配 cygwin 的環境上執行。 -Linux (Ubuntu “Breezy Badger”, kernel 2.6.12) with gcc version 4.0.2. -Mac OS X v10.4 “Tiger” with gcc version 4.0.1 -Windows XP with cygwin (version unknown). 若要在 SENSE 建立一個無線感測網路的模擬,需要下列步驟:. -設定一個感測節點的元件. -從 CostSimEng 建構一個感測網路驅動. -建構整個系統及執行模擬. 圖 4.1 為 SENSE 裡的感測節點結構,裡面包含多個元件,如應用層 (app)、網路層(net)、mac 層、實體層(phy)…等,每個元件都會與其它 元件互相連通,透過 input 和 output 埠,最後連到通道上與其它感測節. 29.
(41) 點通訊。圖 4.2 說明在圖 4.1 感測節點建立完成後,會再與通道作連接, 完成整個網路通訊的架構。. 圖 4.1 sensor 結構. 圖 4.2 通訊通道. 我們使用 SENSE 模擬工具來模擬無感測網路傳輸,我們所用的硬 體配備是 Intel Pentium D CPU 3.0GHz,768 mb DD2 SDRAM,作業系統 WinXP SP3。. 30.
(42) 第二節 模擬分析. 參數設定 WSN 區域大小. 200 公尺*200 公尺. 感測節點數量. 500 感測節點,2 個 sink 節點. 節點傳輸範圍. 25 公尺. 模擬時間. 20 秒. 來源點產生 data 速率 任二點傳輸距離. 2 packets/second 60-70 公尺、120-130 公尺、180-200 公尺. 表 1. 網路模擬參數. 表 2.能量消耗設定 表 1 為我們設定感測環境及來源點與目標點,感測節點的能量消耗我 們採用 MICA2 的設定,如表 2[25]。 圖 4.3 為節點回傳區塊資料給 x sink 時各 x 區塊節點平均消耗的能量變 化。當全部節點都設定好自己的區塊後,最後區塊的節點會開始回傳自己 的 x 及 y 區塊給 sink,以 x 區塊遞減方式回傳給 x sink,中間收到封包的. 31.
(43) 各x區塊平均能量消耗. 能量(焦耳). 2.565 2.56 2.555 2.55 2.545 2.54 1. 2. 3. 4. 5. 6. 7. 8. 9. 10 11 12 13. x 區塊. 圖 4.3 能量消耗平均 節點也會將自己區塊的資訊加入封包內回傳。依圖 4.3 計算所有節點 (500 個節點)回傳資訊至 x sink 時,消耗的總能量為 1272.632 焦耳,若再回傳 給 y sink 能量消耗大約增加一倍。. 表 3. 二點距離為 60-70 公尺傳輸. 表 3 顯示在同一對點下二種方法的模擬數據。在我們的方法中會再標 32.
(44) 示出來源點及目標點所屬的區塊。二種方法在傳輸後顯示出資料傳送所經 過的跳躍數次數以及最後可以不用接受來源點和目標點之間的封包節點 數量。. (a). (b). 33.
(45) (c) 圖 4.4 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=392, Dst=52(b) Src=34,Dst=206 (c) Src=397,Dst=286 分別為來源點與目標點在 距離 60-70 公尺的傳輸路徑. 表 4. 二點距離為 120-130 公尺傳輸 34.
(46) (a). (b). 35.
(47) (c) 圖 4.5 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=19, Dst=494(b) Src=443,Dst=358 (c) Src=28,Dst=172 分別為來源點與目標點在 距離 120-130 公尺的傳輸路徑. 表 5. 二點距離為 180-200 公尺傳輸 36.
(48) (a). (b). 37.
(49) (c) 圖 4.6 左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定(a)Src=331, Dst=344(b)Src=340,Dst=468(c)Src=353,Dst=500. 分別為來源點與目標點. 在距離 180-200 公尺的傳輸路徑. 從前面的數據可以看到,二種方法在傳送上雖然各跳躍數次數不同, 但在我們所提出的泛播方法上都能與原本的泛播方法建立出最短跳躍數 並以此最小跳躍數的節點來傳送封包。圖 4.3-5 顯示二點傳送之路徑,同 一顏色為同一封包傳送的過程,在泛播範圍所涵蓋的區塊包含二點直線上 附近的節點,因此在跳躍數建立能達到最小,路徑也就能與傳統的泛播達 到相同的效果且減少一些不必要的節點作跳躍數的建立。圖 4.6 我們將各 距離下的傳輸所經過的跳躍數作平均,顯示不同距離的傳輸下二者的平均 跳躍數差異,比較結果二者差異極小。在圖 4.7 可看出使用區塊限制泛播 範圍後,在二點距離愈小時,因泛播的區塊也跟著縮小以至於可以節省愈 38.
(50) 多節點去接收封包,距離大則逐漸減少;而無限制泛播範圍情形下,節點 幾乎都必須接受來源點發送的目標請求封包,只有少數節點可能因封包傳 輸時的碰撞而產生無法接受到封包訊息。. 平均跳躍數 12. 跳躍數. 10 8. SSR_Zone-Flooding SSR. 6 4 2 0 60-70. 120-130. 180-200. 公尺. 圖 4.7 平均跳躍數. 感測節點(個). 平均無接收封包節點數 450 400 350 300 250 200 150 100 50 0. SSR_Zone-Flooding SSR. 60-70. 120-130. 180-200. 公尺. 圖 4.8 平均無接收封包節點數. 39.
(51) 第三節 特殊情況下的改善模擬 我們接下來測試的是在特殊情況下泛播的區塊範圍必須做修改,也就 是二點之間的傳送區塊在 x 或 y 區塊差值在 0≦△x≦3,而 y 或 x 區塊差 異較大(△y>5)時,使用公式(2)後是否能達到最短的路徑。. 表 6. 區塊擴增後的比較. (a) 區塊(10,13)->(10,1). 40.
(52) (b) 區塊(1,9)->(13,9). (c) 區塊(9,10)->(9,1). 41.
(53) (d) 區塊(2,8)->(11,8). (e) 區塊(3,7)->(11,7) 圖 4.9(a)(b)(c)(d) (e)左為使用區塊泛播的 SSR 協定,右為原本 SSR 協定. 從表 5 本來源點與目標點區塊位置來做泛播的話,能接收到封包的節 點會是繞較遠的路徑,經過我們公式(2)對此情形做修改後,獲得的傳輸路 徑能與原來的 SSR 協定達到同樣最短路徑的結果。在來源點與目標點位. 42.
(54) 於整個感測區域的最遠距離,如圖 4.8(a),所需要接收目標請求封包的節 點也可不用到整個全部的感測節點去接收並建立跳躍數,節省最偏遠的左 上及右下部分的節點,提升泛播範圍地區的貢獻度。. 43.
(55) 第五章 結論 在無線感測網路路由協定,常需要使用到泛播協定來找尋目標並建立 路徑。而泛播會導致一些負面的影響,如訊息碰撞、傳輸競爭和多餘傳輸。 所以我們提出劃分區塊的泛播方法,希望可藉由此來降低泛播的負面影響 且保有原來的傳輸路徑。實驗結果,在感測區域均勻佈署一定密度的感測 節點,我們的方法一樣可以建立傳輸的最短路徑,且排除最偏遠的節點去 接收跟發送訊息,達到節省能量的目的。 在未來,我們希望可以再對分區塊提出修改。當建立好跳躍數的泛播 區塊內,如果來源點在傳輸一段時間後,來源點與目標點之間節點發生中 斷無法連結情況的話,我們希望能加入容錯的機置,也就是來源點再擴增 當前的泛播範圍以求與目標點的連結。. 44.
(56) 參考文獻 [1] G. Chen, J.W. Branch, B.K. Szymanski, “A self-selection technique for flooding and routing in wireless ad-hoc networks”, In Journal of Network and SystemsManagement, pp.359–380, 2006 [2] E. Shih, S. Cho, N. Ickes, R. Min, A. Sinha, A. Wang, A. Chandrakasan, “Physical layer driven protocol and algorithm design for energy-efficient wireless sensor networks”, Proceedings of ACM MobiCom’01, Rome, Italy, pp. 272-286, 7, 2001. [3] http://computer.howstuffworks.com/mote.htm/printable [4] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci, “Wireless sensor network: a survey”,Computer Networks, vol. 38, pp. 393-422, 2002. [5] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci,“A Survey on Sensor Networks”, IEEE Communications Magazine, vol. 40, Issue 8, pp.102-114, 8, 2002. [6] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci,“Wireless sensor network: a survey”, Computer Networks , vol. 38, pp. 393-422, 2002. [7] S. Tilak, B. Abu-Ghazaleh, and W. Heinzelman, “A Taxonomy of wireless micro-sensor network models”, Mobile Computing and Communications Review, vol. 1 no. 2, 2002. [8] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, “Wireless sensor network: a survey”, Computer Networks , vol. 38, pp. 393-422, 2002. [9] E. Shih, S. Cho, N. Ickes, R. Min, A. Sinha, A. Wang, A. Chandrakasan, “Physical layer driven protocol and algorithm design for energy-efficient wireless sensor networks”, Proceedings of ACM MobiCom’01, Rome, Italy, pp. 272-286, 7, 2001. [10] J. Heidemann, F. Silva, C. Intanagonwiwat, R. Govindan, D. Estrin, and D. Ganesan, “Building efficient wireless sensor networks with low-level naming”, in Proceedings of the Eighteenth ACM symposium on Operating Systems Principles [21], pp. 146-159, 10 2001. [11] W. Heinzelman,“Application-Specific Protocol Architectures for Wireless Networks”, Ph.D. thesis, Massachusetts Institute of Technology, 2000. [12] D. Johnson and D. A. Maltz, “Dynamic Source Routing in Ad Hoc Wireless Networks”, in Mobile Computing, pp. 153–181 ,1996. [13] C. E. Perkins, “Ad Hoc On-Demand Distance Vector (AODV) Routing”, INTERNET DRAFT - Mobile Ad hoc NETworking (MONET) Working group of the Internet Engineering Task Force (IETF), 9, 1997. [14] W. Heinzelman, J. Kulik, and H. Balakrishnan, “Adaptive Protocols for 45.
(57) Information Dissemination in Wireless Sensor Networks”, in Proceedings of the Fifth Annual ACM/IEEE International Conference on Mobile Computing and Networking (MobiCom ’99), pp. 174-185, 8, 1999. [15] C. Intanagonwiwat, R. Govindan, D. Estrin, J. Heidemann, F. Silva, “Directed diffusion for wireless sensor networking”, IEEE/ACM Transactions on Networking, vol. 11, no. 1, pp. 2-16, 2, 2003. [16] W. B. Heinzelman, P. Chandrakasan, and H. Balakrishnan, “An application-specific protocol architecture for wireless microsensor networks” ,IEEE Transactions on Wireless Communications, vol. 1, no. 4, pp. 660-670,10, 2002. [17] M. Zorzi, and R. R. Rao, “Geographic Random Forwarding (GeRaF) for ad hoc and sensor networks: energy and latency performance”, to appear in the IEEE Transactions on Mobile Computing, vol. 2, no. 4, 10-11, 2003. [18] W. Ye, J. Heidemann, D. Estrin, “An energy-efficient MAC protocol for wireless sensor networks”, IEEE INFOCOM 2002, pp. 1567-1576, 2002. [19] Z. J. Haas and M. R. Pearlman, “The Zone Routing Protocol (ZRP) for Ad Hoc Networks”, INTERNET DRAFT - Mobile Ad hoc NETworking (MONET) Working group of the Internet Engineering Task Force (IETF), 9, 1997. [20] Y. Ko and N. Yaidya, “Location-Aided Routing (LAR) in Mobile Ad Hoc Networks” ,in Proc. of MOBICOM’98, pp. 66-75,1998. [21] E. Woodrow and W. Heinzelman, “SPIN-IT: A Data Centric Routing Protocol for Image Retrieval in Wireless Networks”, Proc. International Conference on Image Processing (ICIP ’02), 9, 2002. [22] Sze-Yao Ni, Yu-Chee Tseng, Yuh-Shyan Chen, and Jang-Ping Sheu, “The Broadcast Storm Problem in a Mobile Ad Hoc Network”, Proceedings of the 5th annual ACM/IEEE international conference on Mobile computing and networking, pp. 151-162, 1999. [23] W.R. Heinzelman, J. Kulik, H. Balakrishnan, “Adaptive protocols for information dissemination in wireless sensor networks”, in: Proc. ACM MobiCom , pp.174–185,1999. [24] http://www.ita.cs.rpi.edu/sense/index.html [25] Crossbow MPR-MIB Users Manual Revision A, 6, 2007.. 46.
(58)
數據

![圖 1.1[3] 感測器](https://thumb-ap.123doks.com/thumbv2/9libinfo/8961724.277288/13.892.109.775.99.1007/圖113感測器.webp)
+7



相關文件
[23] Tiantong You, Hossam Hassanein and Chi-Hsiang Yeh, “PIDC - Towards an Ideal MAC Protocol for Multi-hop Wireless LANs,” Proceedings of the IEEE International Conference
Proceedings of the Fifth International Conference on Genetic Algorithms, Morgan kaufmann Publishers, San Mateo, California, pp.110~117, 1996. Horn, J., “Finite Markov Chain Analysis
Kyunghwi Kim and Wonjun Lee, “MBAL: A Mobile Beacon-Assisted Localization Scheme for Wireless Sensor Networks,” The 16th IEEE International Conference on Computer Communications
Krishnamachari and V.K Prasanna, “Energy-latency tradeoffs for data gathering in wireless sensor networks,” Twenty-third Annual Joint Conference of the IEEE Computer
Selcuk Candan, ”GMP: Distributed Geographic Multicast Routing in Wireless Sensor Networks,” IEEE International Conference on Distributed Computing Systems,
Maltz,” Dynamic source routing in ad hoc wireless networks.,” In Mobile Computing, edited by Tomas Imielinski and Hank Korth, Chapter 5, pp. Royer, “Ad-hoc on-demand distance
Kyunghwi Kim and Wonjun Lee, “MBAL: A Mobile Beacon-Assisted Localization Scheme for Wireless Sensor Networks”, the 16th IEEE International Conference on Computer Communications
Gu, “Corner Block List: An Effective and Efficient Topological Representation of Nonslicing Floorplan,” IEEE/ACM International Conference on Computer-Aided Design, pp.8–12,
