行政院國家科學委員會專題研究計畫成果報告
利用 CMAC 類神經網路改善現存之飛彈縱向控制系統
Use CMAC neural network to improve existing missile longitudinal
control system
計畫編號:NSC 90-2213-E-009-113
執行期限:90 年 8 月 1 日至 91 年 7 月 31 日
主持人:陳福川 交通大學電機與控制系
一、中文摘要 本計畫將以兩種不同的方式把 CMAC 類神經網路應用於飛彈動態控制上: 1.結合 CMAC 類神經網路與外迴圈(outer loop)以反置(inverse)包含內迴圈的飛彈 動態系統。 這是貼近現代非線性控制的作 法。 2.結合 CMAC 類神經網路與 PD 控制器構成 新型的外迴圈(outer loop),以控制包含 內迴圈的飛彈動態系統。 這是貼近古典控 制的作法。 關鍵詞:飛彈;控制系統;類神經網路 AbstractIn this proposal, we will apply the CMAC neural networks to the missile control problem, in two different ways:
1. Combining the CMAC neural networks and the outer loop of the traditional missile autopilot to inverse the missile dynamics that contain the inner loop of the autopilot. This approach is more related to modern nonlinear control.
2. Integrating the CMAC neural networks and the original PID outer loop to form a new outer loop to control the missile dynamics that contain the inner loop of the autopilot.
Keywords: missile; CMAC neural networks;
control systems 二、緣由與目的 不同於人工智慧,類神經網路是一種 建構在數位運算的基礎上以模擬人腦的 技術。但是現今可用的類神經網路模式仍 然太過於簡單,以至於不能處理像我們大 腦所能處理的控制問題。因此,他們大部 分只用於學習非線性的映射。在類神經網 路中處理控制問題較熱門的是 CMAC 類神 經網路,因為 CMAC 有快速的學習能力, 並且許多經驗都顯示 CMAC 在工業應用上 有較佳的潛力。本計劃的主要目的在於針 對我們新近的控制架構[17]設計控制 器。經由累加效應與遺忘效應的相互配 合,CMAC 控制器對於非常嚴重的非線性與 不準確性可以快速反應,但是卻不會反應 過度。 本計畫將以兩種不同的方式把 CMAC 類神經網路應用於飛彈動態控制上: 1. 結合 CMAC 類神經網路與外迴圈(outer loop)以反置(inverse)包含內迴圈的 飛彈動態系統。 這是貼近現代非線性 控制的作法。 主要的困難在於從尾翅角(tail-fin angle input)δ 到垂直加速度(normal acceleration)N 的飛彈動態特性是非最Z 小相位(non-minimum phase)的。基於攻角 (angle of attack)α 與垂直加速度 (normal acceleration)N 在動態上的密Z 切關係,我們的規劃如下: a. 將表現於垂直加速度(normal acceleration)N 的 reference Z command 經過適當的路逕規劃後轉換成 表現於攻角(angle of attack)α 的
reference command。
b. 結合 CMAC 類神經網路與 PID 外迴圈 (outer loop)進行對於從尾翅角 (tail-fin angle input)δ 到攻角 (angle of attack)α 的飛彈動態特性 的反置(inverse)。 接下來我們介紹第二種方法。 2.結合 CMAC 類神經網路與 PD 控制器構成 新型的外迴圈(outer loop),以控制包含 內迴圈的飛彈動態系統。 這是貼近古典控 制的作法。 此新型的外迴圈控制器是一個 CMAC 和一個 PD 控制器的平行組合,經過每次的取樣, 由 CMAC 的輸出加上 PD 控制器的輸出而產 生。 而在 CMAC 的學習上,則在每次取樣 後,CMAC 會將 PD 控制器的輸出加到 CMAC 的 receptive field 上。這樣一個做法能 產生積分效應以快速應付 nonlinearities 以及 uncertainties。同時這樣一個做法也 能產生足夠的遺忘效應以免系統反應過 度。 三、結果與討論 我們可據此得到一個飛彈動態特 性的反置(inverse)如下
( )
(
)
[
]
( )
( )
(
)
+ ⋅ − − − + ⋅ + − − ⋅ ⋅ − = α α α α δ α α α α α α α δ α α α α δ δ & & & & & & sin sin cos 1 sin I W r K r K N C N C N C W m V QS I W r K r K M C M C y I QSd N C W m V QS M C y I QSd U 其中U=UO+UC. 其 discrete time format 是( )
k = f(
( ) ( ) ( )
k+1, k, k−1)
U α α α
以利進行數位化控制。
整個 CMAC 類神經網路+傳統 PID 回授控 制系統如圖八所示。在 CMAC 類神經網路 之 recall process, CMAC 類神經網路之 UC(k)
將和 CFC 外迴圈(i.e. Uo(k)) 合作以 track
( )
k+1 des α , 亦即( )
k =U( )
k +U( )
k = f(
( ) ( ) ( )
k+1, k, k−1)
U C o αdes α α + Missile Aero Dynamics ( )k AZC ∑ −KrWI ( )k C δ ( )k AZ - -CMAC Neural Network ( ) (k k ) ( ) (k k ) ( )Uk AZ ,α +1,α ,α −1, 1 UC(k) U(k) Control Plant a K Kφ − m V 1 α&( )k + WI ( )k α r K − + UO(k) Actuator ( )k δFig. 6 CMAC NN based autopilot 重整後, 可得
( )
(
(
) ( ) (
)
)
(
) ( )
(
)
( )
(
) ( ) (
) ( )
(
k k k U k)
CMAC k U k k A W K k k k f k U des des I r des C 1 , 1 , , 1 1 / 1 1 , , 1 − + ≡ − ∆Τ − + ⋅ ⋅ − − + = α α α α α α α α當U
( )
k 被 applied 到系統後, the CMAC 類 神經網路開始進行如下之學習(
)
( )
( )
( )
(
(
) ( ) (
) ( )
)
[
U k U k CMAC k k k U k]
g k W k W o i i 1 , 1 , , 1 1 − + − − + = + α α α µ I W −Kr Actuator ( )S δ α& AZ( )S α& δ CFC δ -Z A ZC A α& AZ S 1 α& α c α& a K Kφ S 1 α& E + m IV W 1 c αFigure 7. AOA configuration of CFC pitch autopilot
電腦模擬:
由 於 α&&=Zαα&+Mαα+Mδδ +Zδδ& ,
尾翅的 maximum deflection and maximum deflection rate 被限制在 ±25 deg (0.436 rad) and 500 deg/s (8.72 rad/s)。 對 flight condition
52 . 37 − = δ M 1/s2 and Zδ =−0.231/s 而言,最 大的 acceleration of AOA 將被限制為 = + = = 37.52*0.436 0.23*8.72 18.36 2 S rad MAX MAX α
α&& &&
假 如 我 們 進 一 步 考 慮 uncertainties of aerodynamic coefficients 以及 the restoring torque of missile body force,則在電腦模擬 中,最大的 acceleration of AOA 將再被降 到 2 10 rad S = α&& 。
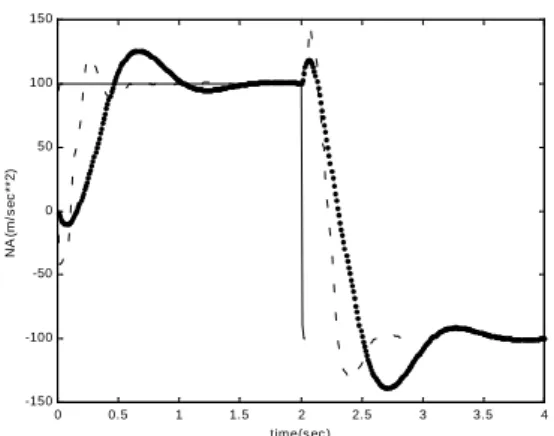
0 0.5 1 1.5 2 2.5 3 3.5 4 -150 -100 -50 0 50 100 150 time(s ec ) N A (m/ s e c ** 2 )
Figure 8 The performance of CMAC control system
0 . 1 8 0 . 2 0 . 2 2 0 . 2 4 0 . 2 6 0 . 2 8 0 . 3 0 . 3 2 5 0 1 0 0 1 5 0 2 0 0 2 5 0 t i m e ( s e c ) N A ( m /se c * * 2 ) 0 . 1 8 0 . 2 0 . 2 2 0 . 2 4 0 . 2 6 0 . 2 8 0 . 3 0 . 3 26 0 6 2 6 4 6 6 6 8 U c( d e g ) A z f A z c U c
Figure 9 The relationships between AZC, Azfand UC.
四、計畫成果自評
In this project we propose a way to integrate the CMAC with existing conventional flight controllers (CFC) to improve performance. Although we proposed a transformation on the CFC, no change in existing CFC design is needed. When the CMAC is disabled, the CMAC controller (which includes the CMAC and the CFC) reduces to the original CFC. The spirit of this research is in maintaining the CFC in its original form, so that existing CFC can be readily employed. And that, built upon the basic stability and performance provided by the CFC, the effect of the CMAC can be adjusted by tuning the learning rate
µ.
The locally learning property of the CMAC allows it to quickly approximate nonlinear mapping, and the generalization property can immediately convert the learned information into effective control. These are the reasons the CMAC controller can quickly improve the performance, particularly during the transient period. With its learning capability, the CMAC controller can also very well deal with uncertainties and parameter variations.
Even the CFC control system, which our CMAC control system is built upon, does not have a complete stability analysis. Nonetheless, the CFC prevails in traditional missile autopilot. In the future, more in testing and design can be done about the CMAC control system we proposed in this work.
五、參考文獻
[1] F. W. Nesline and M. L. Nesline, “How Autopilot Requirements Constrain the Aerodynamic Design of Homing
Missiles” ACC proc. PP. 716-730, 1984. [2] Elliott, J. R., “NASA’s Advanced Control
Law Program for the F4 Digital Fly-by-Wire Aircraft” IEEE Trans. on Automatic Control, Vol. AC-22, No. 5,1977, PP. 753-757.
[3] Athans, M., et. al., “The Stochastic Control of the F-8C Aircraft Uses a Multiple Model Adaptive
Control(MMAC) Method─Part I :Equilibrium Flight” IEEE Trans. on Automatic Control, Vol. AC-22, No. 5,1977, PP. 767-780.
[4] Voulgaris, P., and Valvani, L., “High Performance Linear Quardratic and H∞
Designs for a Super-maneuver Aircraft” Journal of Guidance, Control, and Dynamics, Vol. 14, No. 1, 1991, pp157-165.
[5] Robert A. Nichols, Robert T. Reichert and Wilson J. Rugh, “Gain Scheduling for H-Infinity Controllers: A Flight Control Example” Journal of Control systems Technology. Vol. 1, No. 2, 1993, PP. 69-78.
[6] Jeff S. Shamma and James R. Cloutier, “Gain-Scheduled Missile Autopilot Design Using Linear Parameter Varying Transformations” Journal of Guidance, Control, and Dynamics, Vol. 16, No. 2, 1993, PP. 256-263.
[7] C-F Lin, James R. Cloutier and Johnny H. Evers “Hight-performance, Robust, Bank-to-Turn Missile Autopilot Design” Journal of Guidance, Control, and
Dynamics, Vol. 18, No. 1, 1995, pp46-53. [8] Jacob Reiner, Gary J. Balas and William
L. Garrard “Robust Dynamic Inversion for Control of Highly Maneuverable Aircraft” Journal of Guidance, Control, and Dynamics, Vol. 18, No. 1, 1995, PP.18-24.
“Robust Longitudinal Control Design Using Dynamic Inversion and
Quantitative Feedback Theory” Journal of Guidance, Control, and Dynamics, Vol. 20, No. 5, 1997, pp933-940
[10] Simpson, P.K., Artificial Neural Systems, Pergamon, Fairview Park, NY, 1990.
[11] Debashis Sadhukhan and Salah Feteih “F8 Neurocontroller Based on Dynamic Inversion” Journal of Guidance, Control, and Dynamics, Vol. 19, No. 1, 1996, pp150-156
[12] Marcello R. Napolitano and Michael Kincheloe “On-Line Learning
Neural-Network Controllers for Autopilot Systems” Journal of Guidance, Control, and Dynamics, Vol. 33, No. 6, 1995, pp1008-1015.
[13] Byung S. Kim and Anthony J. Calise “Nonlinear Flight Control Using Neural Networks” Journal of Guidance, Control, and Dynamics, Vol. 20, No.1, 1997, pp.26-33
[14] J.S.Albus,“Data Storage in The
Cerebellar Model Articulation controller” J.Dynamic Systems, Measurement and control,pp.228-233,Sept.1975.
[15] J.S.Albus,“A New Approach to Manipulator Control: The Cerebellar Model Articulation Controller (CMAC) ,” J.Dynamic systems, Measurement and control, pp.220-227,Sept. 1975.
[16] Che-Hsu Chang and Kuang-Wei Han “Gain Margins and Phase Margins for Control Systems with Adjustable
Parameters” Journal of Guidance, Control, and Dynamics, Vol. 13, No. 3, 1990, pp404-408.
[17] D. Ellison, “On the Convergence of the Multidimensional Albus Perception” The International Journal of Robotics
Research, Vol. 10, No. 4, August 1991 , pp338-357.
[18] Frank G. Moore State-of-the-art
Engineering aeroprediction Methods with Emphasis on New Semiempirical
Techniques for Predicting Nonlinear aerodynamics on complete missile configurations”, NAVAL Surface Warfare Center, 1993.
[19] J.-S. Ker et al, “Hardware
Implementation of CMAC neural network with reduced storage requirement”, IEEE Trans. on Neural Networks, Vol. 8, No. 6,