由較佳邊集合引導之基因區域搜尋法 及其應用於解旅行推銷員問題
Promising Edge Set Guided Genetic Local Search Algorithm for the Traveling Salesman Problem
曾怜玉
國立中興大學資訊網路與多媒體研究所
國立中興大學資訊科學與工程系 lytseng@cs.nchu.edu.tw
余家華
國立中興大學資訊科學與工程系 s9014035@gmail.com
摘要
旅行推銷員問題(Traveling Salesman Problem ; TSP) 為 典 型 的 組 合 最 佳 化 (Combinatorial Optimization )問題之一。自西元 1930 年以來,它 便吸引許多不同領域的學者投入研究,然而TSP 問 題已被證明是NP-hard 問題,因此如何發展出在有 限時間內能找出全域最佳解(global optimum)的方 法,便是研究學者的最大挑戰。近年來的研究中,
發現可利用 TSP 問題修正過之邊成本結合最小生 成樹的規則來取得一些較佳邊,稱為較佳邊集合
,在過去研究中利用了較佳邊集合來加速求解過程 中收斂速度,但較為可惜的是,過去研究並無針對 較佳邊集合的特性作進一步的利用。
因此本論文結合較佳邊集合與基因區域搜尋 法以期能有效應用於求解TSP 問題的研究上,且透 過較佳邊集合能夠有效連結全域搜尋與區域搜尋 的合作機制,使其兩者達到更完善的搜尋效果與求 解品質。本論文採用 TSPLIB 題庫之 35 題來測試 本研究提出的基因區域搜尋法。在測試結果發現
,本研究的基因區域搜尋法相較於目前表現較佳的 LKH 演算法與 ANGEL 演算法,有相當不錯的求解 品質與效能表現。
關鍵詞:旅行推銷者問題,基因演算法,由較佳邊 集 合 引 導 之 基 因 區 域 搜 尋 法 ,LKH 演 算 法 , ANGEL 演算法。
Abstract
The traveling salesman problem is an important combinatorial optimization problem. Since 1930, many researchers had been devoting their efforts in solving this problem. Being an NP-hard problem, the traveling salesman problem is unlikely to be solved in polynomial time. Hence a main research issue is to design efficient algorithms to find near optimal solutions for the TSP. In recent studies, the collection of promising edges by deriving the edges of the minimum spanning trees had been proposed. But the promising edges were not fully utilized in previous studies.
In the paper, we used the promising edge set to guide the search of a genetic local search algorithm.
First, the promising edge set was generated by iteratively generating the minimum spanning trees.
Then, the promising edge set was used to guide the genetic local search algorithm in searching the promising areas. Furthermore, the promising edge set will evolve along the search. The proposed algorithm was tested on 35 instances taken from TSPLIB. The experimental results revealed that the solution quality of the proposed algorithm is similar to that of the ANGEL and is better than that of the LKH.
Keywords: Traveling salesman problem, genetic
algorithm, promising edge set guided genetic local search algorithm, LKH algorithm, ANGEL algorithm.一、緒論
旅行推銷員問題(Traveling Salesman Problem ; TSP)[22] 為 典 型 的 組 合 最 佳 化 (Combinatorial Optimization )問題之一。除此之外,TSP也是許多 問題的基礎,如排程問題(Scheduling Problem )[6]、
車輛巡迴問題(Vehicle Routing Problems )[5]等問題 都是TSP問題的延伸。所以自西元 1930 年以來,它 便吸引許多不同領域的學者投入研究,然而TSP問 題也已被證明是屬於NP-hard問題[16],因此如何發 展 出 在 有 限 時 間 內 能 找 出 全 域 最 佳 解(global optimum)的方法,便是研究學者的最大挑戰。
TSP問題的定義非常單純,從某一城市出發,
在所有城市皆走過一次,最後回到起始城市的限制 下,找到一個最短路徑解。在較早期的研究,學者 們利用確切解法(Exact Algorithm),如分枝定限法 (Branch-and-Bound ; B&B)[31] 、 動 態 規 劃 法 (Dynamic Programming ; DP)[20]等方法來求得全域 最佳解,可是在TSP問題規模不斷提升的時候,TSP 問題的解空間(solution space)也以n階層(n!)的方式 在增加,使得求解之時間成指數型的成長。
為解決確切解法的效能瓶頸,研究學者們開始 利用近似解法(Approximation Algorithm)裡的超啟 發式演算法(Meta-Heuristic),如基因演算法(Genetic Algorithm ; GA)[19][29]、蟻群最佳化法(Ant Colony Optimization ; ACO)[10][15]、模擬退火法(Simulated Annealing ; SA)[2][26]、禁忌搜尋法(Tabu Search ; TS)[12] 等 方 法 與 啟 發 式 演 算 法 (Heuristic) , 如 Lin-Kernighan(LK)[24] 和 Heslgaun’s LK(LKH)[17]
等方法及其結合[3][13][25][30]得到相當好的解品 質與速度效能。
在 近 年 的 研 究 裡 , 我 們 於 Heslgaun’s LK(LKH)[17]與ANGEL[30]的研究中發現,ANGEL 引用LKH的研究來提出一項針對TSP問題特性極為 有利的選邊規則,簡單來說,就是利用最小生成樹 (minimum spanning tree ; MST)的規則來選擇出較 佳的邊。在ANGEL的研究結果中顯示,一般的TSP 問題大多可利用執行數次的選邊規則來挑選出大 多數甚至全部最佳解的邊來構成一較佳邊集合,但
在研究中較為可惜的是,ANGEL並無針對較佳邊 集合的初始分佈特徵(有較多最佳解的邊會落在較 早取得的較佳邊集合裡,且愈多次的取邊動作會帶 來愈多不必要的非最佳解邊)來多作利用,只將其 應用在蟻群用來產生解上與交配機制上。
於是本研究提出方法來有效利用上述選邊規 則所產生之較佳邊集合(promising edge set ; PES)的 初始分佈特徵,以期節省不少求解過程中無效的搜 尋時間。我們利用基因區域搜尋法作為本研究的搜 尋模型,並嘗試結合較佳邊集合來引導基因區域搜 尋法求解 TSP 問題,並建構出一個不錯的搜尋架 構。
基於前述目的,本研究發展重點描述如下:
1. 設計出有效利用較佳邊集合來建立較佳 初 始 解 的 方 法 : 在 過 去 文 獻 中 , 除 了 ANGEL[30]外,並無特別利用較佳邊集合 來建立較佳初始解的建構法。因此本研究 將設計一個能較為有效利用較佳邊集合 的初始解建構法以提升初始解的品質。
2. 對較佳邊集合的品質與數量的控制:較佳 邊集合的選邊規則中,雖然能透過較多次 的取邊動作來提高最佳解邊的涵蓋率,可 是過多的非最佳解邊依舊會帶來相當大 的負擔。所以本研究將採用較少次數的取 邊動作,雖然會降低最佳解邊的涵蓋率,
不過也同時降低非最佳解邊的數量及不 必要的搜尋負擔。而相對一開始就沒被選 入較佳邊集合的最佳解邊也須利用其他 機制來把它找出,並將其置於較佳邊集合 裡以提高找到最佳解的機會。
3. 建構基因區域搜尋法與較佳邊集合的結 合機制:本研究希望能透過基因區域搜尋 法與較佳邊集合的共同合作來強化有效 搜尋的能力。本研究擬發展出由較佳解集 合引導之基因區域搜尋法。
而本論文架構描述如下,第一節概述TSP問題 的研究背景,第二節將回顧TSP問題的相關文獻,
以及與本研究相關演算法的介紹,而第三、四節將 介紹較佳邊集合的生成機制及詳細說明本研究所
使用的基因區域搜尋法的交配、突變、選擇法則和 區域搜尋法等機制。第五節主要針對TSPLIB[28]之 35 題進行實驗並附上實驗參數與數據,且分析討論 實驗結果。第六節為結論。
二、文獻回顧
圖 1 常見TSP 解法之分類圖 本節將針對旅行推銷員問題於近年來之發展
做一簡單闡述,接下來會把本研究中所使用之基因 演算法與LKH 演算法做一基本介紹。
2.1 旅行推銷員問題
旅行推銷員問題(Traveling Salesman Problem ; TSP)[22],是指一名推銷員在一些城市推銷貨品,
在城市之間距離已知的情況下,並假設每個城市只 能被拜訪一次且最後回到起始城市的條件下,找出 循環所有城市最短的路徑解(tour)。進一步,本論文 利 用 下 面 的 敘 述 來 定 義TSP 問 題 : 有 城 市 { } 且任二個城市{ } 之間的距離為
,問題目標在找出一個城市排列的順序來 可以使下式(1)能得到最小數值:
n
1
, ,...,
2 nc c c
( , )
i jd c c
i
,
jc c
1
( ) ( 1) ( ) (1)
1
( , ) ( , ) (1)
n
i i n
i
d c
πc
πd c
πc
π−
+
=
∑ +
,這也是TSP 問題最短路徑解的長度。
此外,對於所有的城市只要
對所有 ,則稱為symmetric TSP (STSP),反之,
對 某 一
i
且 , 便 稱 作asymmetric TSP (ATSP)。
( , )
i j( , )
j id c c = d c c ( , ) c c
j ii ≠ j
≠ j d c c ( , )
i j≠ d
從 1930 年開始到現在,它吸引許多不同領域 的學者投入研究。同時TSP問題也被証明是屬於 NP-hard[16]問題,所以如何能發展出在有限時間內 找出近似最佳解或最佳解的快速近似解法,便是研 究學者的最大挑戰。
就目前的研究而言,對於求解TSP 問題的方式 可概分為二類:確切解法(Exact Algorithm)與近似解 法(Approximation Algorithm),可見圖 1。
在 早 期 的 研 究 學 者 們 利 用 確 切 解 法(Exact Algorithm) ; 如 分 枝 定 限 法 (Branch-and-Bound ;
B&B)[31]、動態規劃法(Dynamic Programming ; DP)[20]等方法來求得全域最佳解,可是在TSP問題 規模不斷提升的時候,TSP的解空間也以n階層(n!) 的方式在增加,使得求解的時間成指數型的成長,
因此確切解法只能解較小型的TSP。
而較後期的研究裡,研究學者們開始利用近似 解法來求解TSP,在過去的研究文獻中可以發現數 種近似解法在於解決TSP問題的最佳化上皆有不錯 的 表 現 , 如 Domain-Specific Local Search Algorithms[23][24][27] 、 基 因 演 算 法 (Genetic Algorithm ; GA)[19][29]、蟻群最佳化法(Ant Colony Optimization ; ACO) [10][15] 、 退 火 模 擬 法 (Simulated Annealing ; SA)[2][26]、 門 檻 接 受 法 (Threshold Accepting ; TA)[14]、禁忌搜尋法(Tabu Search ; TS) [12]、Elastic Nets[11]和類神經網路 (Neural Networks ; NN)[1]等。
近似解法還可再依搜尋特性分為二種方法:超 啟 發 式 演 算 法(Meta-Heuristic) 與 啟 發 式 演 算 法 (Heuristic),在上面所提到的,如基因演算法、蟻 群最佳化法、退火模擬法、門檻接受法、禁忌搜尋 法等方法皆屬於超啟發式演算法,由於具跳脫區域 最佳解(Local Minima)的能力,一般而言,都可以 找到品質比啟發式演算法所能找到的解還好的 解。
而啟發式演算法多是利用較單純規則來作為
求解的依據,追求能在短時間內找出近似最佳解或 全域最佳解的方法。啟發式演算法依方法不同可分 成二類:路徑解建構法(Tour Construction Heuristic) 和路徑解改善法(Tour Improvement Heuristic)。路徑 解建構法是逐步建立一個較佳的初始路徑解,作法 通常是先在城市集合中隨機選一個城市為起點,然 後利用一些簡單的規則選出最有優勢的下個城市,
之後重覆選城市動作,直到產生符合TSP問題的路 徑解為止,如Nearest Neighbor Heuristic[21]、Greedy Heuristic[21]、Clarke-Wright Savings Heuristic[8]和 Christofides Algorithm[7]等方法。另外,路徑解改 善法是利用一組已產生好的路徑解來優化,利用交 換改變路徑解中的城市之排序位置,來讓路徑解達 到區域最佳解為止,最終期望能達到全域最佳解。
通常使用的路徑解改善法為 2-Opt[9]、3-Opt[4][23]
、Lin-Kernighan(LK)[24]和Heslgaun’s LK(LKH)[17]
。從過去的研究中顯示,雖然啟發式演算法的速度 都很快,但通常容易使得路徑解落入區域最佳解而 無法得到全域最佳解。
因此,近年來TSP問題的研究多數著重於結合 超啟發式演算法與啟發式演算法,所幸在超啟發式 演算法與啟發式演算法的有效互補作用之下,使得 不 少 研 究 結 果 皆 有 極 佳 的 求 解 品 質 與 效 能[3][13][25][30]。
2.2 基因演算法
基因演算法(Genetic Algorithm ; GA)的概念是 由John Holland [18]於 1975 年首度發表,其概念是 透過科學方法去表現大自然「物競天擇、適者生存、
不適者淘汰」的演化過程。
在 基 因 演 算 法 中 最 主 要 的 元 素 便 是 染 色 體 (chromosome),一條染色體就代表一個個體,染色 體則由許多遺傳基因(genes)組成,每個基因對應著 此物種某些特性。許多個體的集合便形成一個母體 族群(population),而基因演算法便是模擬該母體族 群在生物界的自然演化過程。演化過程是經由染色 體交配(crossover)、染色體突變(mutation)與選擇 (selection)的機制來達成。
此外為了能夠有效評估染色體的優劣程度。尚
需設計一合理的評估方法,通稱之為適應函式 (fitness function),每一條染色體經由適應函式評估 後將得到一個適應值(fitness value)。適應值較佳的 染色體通常代表擁有較佳的基因特徵,因而在母體 族群中適應值較佳的染色體應可擁有較大機會保 留至下一世代。一般而言,適應函式與問題的目標 函式有相當大的關係。
基因演算法的主要三個遺傳法則如下:
1. 交配機制:係指兩條父代染色體(parents) 透過配對交換機制產生一至多條的子代 染色體(children),並且子代染色體將會遺 傳父代的染色體的部份特徵,這也是整個 交配機制中的重要特點。
2. 突變機制:則是在族群的演化過程中一些 染色體發生了不可預期的變化現象,使得 子代染色體含有父代染色體所不具有的 特徵。
3. 選擇機制:從族群中選出適應值較好的染 色體保留到下一世代,使得較「優良」的 遺傳因子能流傳與繼承。
所以基因演算法的一個世代就是經過交配、突 變、選擇,這三個動作,藉由世代的交替將使得族 群不斷的演化,期待產生的子代能愈來愈好。
迄今基因演算法已應用到許多求解NP-hard及 最 佳 化 的 問 題 中 , 如 排 程 問 題(Scheduling Problem)[6]、旅行銷售員問題(Traveling Salesman Problem ; TSP) [19][29]、車輛巡迴問題(Vehicle Routing Problems )[5]等問題上皆有相當不錯結 果。
2.3 LKH 演算法
Helsgaun’s LK(LKH)[17]是利用Lin-Kernighan (LK)[24]的基本原理加以改良的啟發式演算法。簡 單來說,LKH主要改良的特色有二點:強化節點順 序重排機制與提高節點順序重排之有效性的設計,
以下將依序說明這二大特色的重點。
在強化節點順序重排機制上,LKH 保留原本 LK 的循序式 2-opt、3-opt 與 4-opt 等如圖 2 所示的 換邊規則外,又加入循序式5-opt 與非循序式 4-opt,
圖 2 循序式 2-opt、3-opt 與 4-opt 示意圖
圖 3 非循序式 4-opt 與循序式 5-opt 示意圖 如圖 3 所示,來改善可能因換邊次數太少或循序換 邊的盲點而無法進一步改良路徑解的問題。在提高 節點順序重排之有效性上,LKH 也針對 LK 的挑選 候選邊集合(candidate set)方法作了修改。原始 LK 的節點順序重排設計裡,只對路徑解嘗試交換在候 選邊集合裡的邊以減少不必要的交換,而LK 挑選 候選邊集合的方式卻只利用原始的邊之成本來決 定。在Helsgaun 分析 LK 挑選候選邊集合的規則之 後,覺得LK 候選邊集合對最佳解邊的涵蓋率依舊 不高,於是在LKH 導入一個較佳的選邊依據概念,
稱為α−
nearness
。圖 4 最小生成樹與 minimum 1-tree 之基本
定義關係圖
nearness
α−nearness
主要是藉由 minimum 1-tree 與最 佳解之間差異所產生的相對貢獻值而定,minimum 1-tree 之定義可參考圖 4 所示,Helsgaun 藉由分析 得知minimum 1-tree 通常包含了最佳解邊的 70%到 80%。因此利用α−
nearness
定能取得比LK 候選邊 集合更正確的候選邊集合。α−
1 1
( , ) r s L M ( ( , )) r s L M ( )
α =
+− (2)
(
1) (
1+( , )) r s
) r s
nearness
的定義如 下式(2):
,
L M
是指minimum 1-tree 的長度,L M
是指強制必須包含邊
( ,
的minimum 1-tree 長度。所 以 與 minimum 1-tree 完 全 相 符 之 邊 的 α− 會 等 於 0 , 因 此 LKH 只 須 利 用
nearness
α− 的大小便可更精確地決定該邊的優劣 程度,當然也增加了節點順序重排的有效性。
於文獻[17][30]中可知,LKH雖無法保證解題 的成功率,但透過較佳的候選邊集合與強力的換邊 規則的幫助下,LKH的解題成效仍是其他啟發式演 算法難以勝過的。
三、較佳邊集合
本節將描述較佳邊集合(promising edge set ; PES)的生成機制及介紹加權邊成本的定義與應用,
並利用較簡潔的圖表將較佳邊集合的優勢作一簡 單歸納說明。
3.1 生成機制
由 過 去 研 究[17] [30] 可 得 知 , 最 小 生 成 樹 (minimum spanning tree ; MST)通常可以包含很大 比率的最佳邊解。因此本研究也利用最小生成樹作
為較佳邊集合的取邊規則。而較佳邊集合的生成流 程如下:
Step 1. 首先將較佳邊集合設為空集合。
Step 2. 重覆執行 Step 3 與 Step 4 共 次。
p
Step 3. 排除已在較佳邊集合裡的邊,再次執行最小生成樹的取邊規則。
Step 4. 將最小生成樹取出來的邊放入較佳 邊集合裡。
依上述流程可得知,在執行 次的取邊規則後,
較佳邊集合便會包含
p ( 1)
p n −
個較具優勢的邊。下 面表 1 是針對本研究實驗題組TSPLIB[28]之 35 題 中隨機選出20 題在執行 7 次取邊規則後,記錄每 增加一次取邊動作後還有多少最佳解的邊被遺 漏。經由表 1 的觀察,我們清楚了解在經過多次的 取邊動作後,已有不少題目可收集到將近乎百分百 的最佳解邊,如執行4 次取邊動作後,在 20 題中 的2 題已經達到最佳解邊的零遺失率(missing rate),
在執行7 次取邊動作後,已有 8 題達到最佳解邊的 零遺失率。
除此之外,於表 1 中我們也觀察到較佳邊集合
的初始分佈特徵-有較多最佳解的邊會落在較早取 得的最小生成樹裡,且愈多次的取邊動作會帶來較 多不必要的非最佳解邊。然而在過去的研究[30]中 卻沒有針對上述特徵作有效的應用,實為可惜。
然而我們使用原始邊成本來產生較佳邊集合的作 法,雖然已得到不少最佳解的邊,但我們其實可以 再透過一個簡單規則來改變原始邊成本以加速取 得最佳解的邊,因此接下來我們將介紹:原始邊成 本的改良-加權邊成本,這方法是由Helsgaun[17]提 出來的。
3.2 加權邊成本
表 1 分析較佳邊集合在不同取邊次數下的最佳解邊遺失率
一般而言,我們知道每個路徑解(tour)其實都是 一 個 1-tree[17] , 因 此 在 [17] 中 , Helsgaun 利 用 minimum 1-tree來取得TSP問題最佳路徑解的下限,
然而在minimum 1-tree的取邊規則之下,其實容易 使得每個節點的連結次數(degrees)不穩定,但如能 將minimum 1-tree在保留住最佳順位邊的原則下調 整到接近路徑解的話,那麼修正後minimum 1-tree 就能更接近於最佳路徑解,而minimum 1-tree的最 佳順位邊,也就是minimum 1-tree中考慮各個節點,
與此節點連結的邊當中最短的即為最佳順位邊。基
於上述觀點,Helsgaun藉由導入懲罰值 來改變邊 成本,使得修正後的minimum 1-tree得到更為接近 最佳解的狀態。接下來將描述如何利用懲罰值 來 推導出一個能修正最佳路徑解下限的目標式。
表 2 分析加權邊成本之較佳邊集合在不同取邊次數下的最佳解邊遺失率
首先可假設懲罰值π 皆為同樣數值並將邊成 本改由式(3)來呈現:
ij ij i j
d = c + π + π (3)
,cij是代表原始的邊成本,dij是加權後的邊成本,
因此加權後的完整路徑解會剛好增加
2 ∑
πi的大小。在此最佳路徑解下限也改成式(4)來表達:
( ) ( ) - 2
iw
π= L T
πΣ
π(4)
,
T
π是指利用加權邊成本所產生的minimum 1-tree,(
L T )
π 則是T
π的長度。推導到此,已找到能有效修 正最佳路徑解下限的目標式,即為式(4)。因為利用 式(4)可得知在π 非皆同值的情況下,iw ( )
π 的大小 將會與2 ∑
πi有絕對的關係,只有愈接近完整路徑 解的T
π愈能使2 ∑
πi的反作用效果降低。由此推論,在
T
π保持原始最佳順位邊不變的情況下,愈接近完 整路徑解的T
π將容易得到較大的w ( )
π ,相反的,較不具完整路徑解形狀的
T
π就會容易得到較小的( )
w
π 。所以目標便是在不變動原始 minimum 1-tree 中 最 佳 順 位 邊 的 前 提 下 , 找 出 一 組1 2
{ , ,...., }
nπ
=
π π π 來使得w ( )
π 最大化。Helsgaun 利 用 次 梯 度 最 佳 化 (subgradient optimization)的方式來獲得最大化的
w ( )
π 。次梯度 最佳化的演算法如圖 5 所示。在次梯度最佳化過程 中,以節點的連結次數為適應條件,如果能使節點 的連結次數皆為2,就算達到完全最佳化的目的,也代表已找到路徑最佳解與完全精確的加權邊成 本。
在此我們重新利用加權邊成本來取得新的較 佳邊集合,對表 1 的 20 題進行取邊並記錄於表 2 中。觀察表 2 的數據,我們可清楚得知加權邊成本 修正了原始邊成本的不足,使得更多最佳路徑解的 邊能提早被發現,如執行 4 次取邊動作後,在 20 題中已經有 9 題達到最佳解邊的零遺失率(missing rate)。因此本論文之較佳邊集合是利用加權邊成本 與較佳邊生成機制來共同產生,以提供更正確的初 始較佳邊資訊。
π π
/* , vk and dk are penalty vector, subgradient vector and vector of degress of nodes.*/
πk
1. Let k = 0, π0= 0 and W = -
∞
.2. Find a minimum 1-tree, Tπk.
k k
3. Compute w(π ) = L(T ) π − ∑2 πi. 4. Let W = max(W,w(π )k ).
5. Let vk = dk – 2, where dk contains the degress of nodes in Tπk. 6. If vk = 0 ( is an optimum tour), or a stop criterion is
satisfied, then stop.
k
Tπ
7. Choose a step size, tk, tk is a positive scalar and t0 is set to 1.
8. Let π = πk+1 k+1+t (0.7vk k+0.3v )k-1 where v-1 = v0. 9. Let k = k+1 and go to Step 2.
圖 5 次梯度最佳化演算法虛擬碼 (出處: K. Helsgaun, An effective implementation of the Lin–Kernighan traveling salesman heuristic [17])
圖 6 由較佳邊集合引導之基因區域搜尋法之 虛擬碼
四、由較佳邊集合引導之基因區域搜 尋法
本論文提出由較佳邊集合引導之基因區域搜 尋 法(Promising Edge Set Guided Genetic Local Search Algorithm ; PESGLS)並用以解旅行推銷員問 題(Traveling Salesman Problem ; TSP)。
為了能加快求解速度與提高解品質,本論文所 應用的基因區域搜尋法除了運用基因演算法作為 全域搜尋架構之外,更採用 LKH 演算法為區域搜 尋架構以期更能發揮較佳邊集合的優勢。
本節重點在於介紹由較佳邊集合引導之基因 區域搜尋法所運用之交配機制、突變機制、選擇機 制及其他相關設定。
4.1 整體架構
首先說明整個由較佳邊集合引導之基因區域 搜尋法的架構,一般的基因區域搜尋法是利用基因 演算法的演化過程中加入了區域搜尋的機制,換言 之,就是在交配機制後馬上對子代作區域搜尋以加 快求解進步的速度。可是在不作任何限制的前提之 下,傳統的基因區域搜尋法會任由基因演算法到處 搜尋,且為了能在較短的時間內判斷是否為較佳解 的動機下,時常會減少區域搜尋階段應有的步驟而 使得求解品質不佳。
本論文的基因區域搜尋法結合了較佳邊集合 的優勢,以降低不必要的全域搜尋成本並強化區域 搜尋的能力,此外透過適度且多樣的發散機制來補 強初始較佳邊集合未能包括最佳路徑解之所有邊 的不足,以求達到更好的求解效能與品質。整個演 算法架構如下圖 6 所示。
4.2 初始解建構法
本論文中的初始解建構法主要以應用較佳邊 集合之初始分佈特徵與具備適度的廣度發散能力 為設計重點。依上述要點,我們提出三種初始解建 構法,依廣度發散能力的程度多寡,由低至高依序 為:4.2.1 較佳邊優先之貪婪建構法。4.2.2 較佳邊 優先之隨機建構法。4.2.3 參考較佳邊之隨機建構 法。
4.2.1 較佳邊優先之貪婪建構法
在說明較佳邊優先之貪婪建構法前,我們先定 義較佳邊子集合(promising edge subset)一詞,對每 一節點都有一較佳邊子集合,每一節點的較佳邊子 集合可完全包含較佳邊集合裡與此節點相連的所 有邊。此外,較佳邊子集合為有序排列,其排列順 序與較佳邊集合的生成順序是完全相同的。
由於接下來的論文中將會出現較多的較佳邊 子集合一詞,所以在此先行統一說明。其兩者關係 可參考圖 7。
4 3 5 6
2 7 1
8 未選取節點
(a) 在未選取節點中隨機選擇一節點為指標節點
建構解 待選節點
5 隨機選取
指標節點
4 3 6 2
7 1
8 未選取節點
(b) 利用指標節點找出下一個接續節點-情況1
建構解 待選節點
選取 5
指標節點
節點5 - 較佳邊子集合
Rank1:(5,4) Rank2:(5,1) 4
新指標節點
3 6 2
7 1
8 未選取節點
(b) 利用指標節點找出下一個接續節點-情況2
建構解 待選節點
選取
5 指標節點
節點4 - 較佳邊子集合
Rank1:(5,4) Rank2:(4,1)
順 序
1
新指標節點
找到(4,1),節點1可被選取 找到(5,4),節點4可被選取
4
順 序
3 6 7 8 未選取節點
(c)當較佳邊子集合無法參考,貪婪插入新指標節點
建構解 待選節點
5
節點2 - 較佳邊子集合 Rank1:(2,4) Rank2:(2,5) Rank3:(1,2) 找到(1,2),但節點1已出現 過,且後續已無可再參考資 料。進入貪婪插入機制運作
1、隨機從未選取 節點中選出一節 點
2、隨機選出節點7
3、找出節點7與 已選節點1、2、
5、4何者最接 近,結果為節點5
4、利用節點5之節點鄰近節 點順序{4,1,2,3,8,6,7},找 出與節點7接近且未被選過的 最近節點,結果為節點8
5、將節點8插入原建構序列 中最近的位置,如節點8放 入節點4與節點1之間為最短 路徑
1
指標節點 2
6、完成貪婪插入機制
5 2 1
4 新指標節點 選取
3 5
1
7 6 2
未選取節點
(d) 重覆(b)(c)步驟,直到完成初始解建構
建構解 待選節點
4 8 4
8
順 序
圖 8 較佳邊優先之貪婪建構法運作範例
圖 7 較佳邊集合與較佳邊子集合關係圖
較佳邊優先之貪婪建構法主要是以利用較佳 邊集合的初始分佈特徵為重點。建構動作的一開始,
將會隨機選擇一個節點作為建構過程中的指標節 點,指標節點是指用來決定下一個節點的基準節點,
指標節點會先以較大機率
k
優先嘗試該節點的較 佳邊子集合裡排序第一的候選節點,或較低機率任意選擇候選節點,
k k
1
k
21
+
2= 1
,當該候選節點無法 選取時,才會再依序嘗試排序較後的候選節點,被 選出來的候選節點將再成為指標節點,如此重覆下 去,直到完成初始路徑解為止。但如果指標節點的 候選節點中皆無法挑選來擴展路徑時,便會執行貪 婪插入機制來定出新的指標節點。而貪婪插入機制的運作方式是先任選一個未 選節點並找到一個離它最近的已選節點,接著透過 該已選節點去找到一個接近於上述任選節點並與 它距離最近的未選節點作為新的指標節點,最後將 新的指標節點插入正建構路徑解中的最近位置,完 成後便回歸到執行原本的建構動作。
以下用一簡單例子來說明較佳邊優先之貪婪 建構法的運作過程,見圖 8,建構動作一開始如圖 8(a)所示,隨機從未選取節點中選擇一個節點為指 標節點,接下來將視圖 8(b)的兩種情況決定是否優 先挑選參考指標節點的較佳邊子集合之第一候選 節點或任意候選節點,在挑選的候選節點無法擴展
3
6 7 8 未選取節點
(c)當較佳邊子集合無法參考,隨機插入新指標節點
建構解 待選節點
5
節點2 - 較佳邊子集合 Rank1:(2,4) Rank2:(2,5) Rank3:(1,2)
找到(1,2),但節點1已出現過,
且後續已無可再參考資料。
此時將隨機找到一個未選取節點 為新指標節點
1
指標節點 2
5 8 2
1 新指標節點
隨機選取
2 3
1 6
8
7 未選取節點
(d) 重覆(b)(c)步驟,直到完成初始解建構
建構解 待選節點
5 4 4
4
順 序
4 3
5 6 2
7 1
8
(a) 在未選取節點中隨機選擇一節點為指標節點
建構解 待選節點
5 隨機選取
指標節點
4 3
6 2
7 1
8 未選取節點
(b) 利用指標節點找出下一個接續節點-情況1
建構解 待選節點
選取 5
指標節點
節點5 - 較佳邊子集合
Rank1:(5,4) Rank2:(5,1) 4
新指標節點
3
6 2
7 1
8 未選取節點
(b) 利用指標節點找出下一個接續節點-情況2
建構解 待選節點
選取
5
指標節點
節點4 - 較佳邊子集合
Rank1:(5,4) Rank2:(4,1)
順 序
1
新指標節點
找到(4,1),節點1可被選取 找到(5,4),節點4可被選取
4
順 序
圖 9 較佳邊優先之隨機建構法運作範例
路徑時,會依序把該候選節點之後的節點都會嘗試 過,直到無候選節點可選取為止。如發生無候選節 點可選之時,會進入圖 8 (c)的狀態,藉由貪婪插 入機制找到新的指標節點,重新又開始回到圖 8 (b) 的動作,直到建構解完成,如圖 8 (d)。
4.2.2 較佳邊優先之隨機建構法
較佳邊優先之隨機建構法與較佳邊優先之貪 婪建構法極為相似,便不再重覆描述相同的說明,
而兩者的不同之處是如果指標節點的候選節點中 皆無法挑選來擴展路徑時,便會隨機選擇一個未選 過的節點來定出新的指標節點。
以下用一簡單例子來說明較佳邊優先之隨機 建構法的運作過程,見圖 9,建構動作一開始如圖 9 (a)所示,將隨機從未選取節點中選擇一個節點為 指標節點,接下來將視圖 9(b)的兩種情況決定是否 優先挑選參考指標節點的較佳邊子集合之第一候 選節點或任意候選節點,在挑選的候選節點無法擴 展路徑時,會依序把該候選節點之後的節點都會嘗 試過,直到無候選節點可選取為止。如發生無候選 節點可選之時,會進入圖 9(c)的狀態,藉由隨機挑 點來找到新的指標節點,重新又開始回到圖 9 (b)
的動作,直到初始建構解完成,如圖 9 (d)。
4.2.3 參考較佳邊之隨機建構法
參考較佳邊之隨機建構法也利用較佳邊集合 來增高最佳解邊的取得機率,與前兩個建構法的不 同在於此建構法並不利用較佳邊集合的初始分佈 特徵來強化取點的偏向,相反的是利用隨機的特點 來強化全域搜尋的能力以增加找到未知最佳解邊 的機會。
建構動作的一開始,也是隨機選擇一個節點作 為建構過程中的指標節點,指標節點會先以較大機 率 隨機選擇一個位於較佳邊子集合裡的候選節 點,或較低機率 直接隨機選擇一個未選過的節點,
k
3k
43 4
1
k + k =
,當該候選節點無法擴展路徑時,會再 隨機選擇一個未選過的節點來定出新的指標節點,如此重覆下去,直到完成初始路徑解為止。
以下用一簡單例子來說明較佳邊參考之隨機 建構法的運作過程,見圖 10,建構動作一開始如 圖 10 (a)所示,將隨機從未選取節點中選擇一個節 點為指標節點,接下來如圖 10 (b)情況所示,將隨 機挑選指標節點的較佳邊子集合裡的一個候選節 點或直接隨機挑選一未選節點為新指標節點,而在
較佳邊子集合裡挑選的候選節點無法挑選來擴展 路徑時,便會直接隨機挑選一未選節點,來作為下 一指標節點,建構過程將重覆圖 10 (b)的動作,直 到初始建構解完成,如圖 10 (c)。
圖 11 順序交配法運作範例
圖 10 參考較佳邊之隨機建構法運作範例
本論文之初始族群的數量百分比 n1、n2、n3, 依序為較佳邊優先之貪婪建構法、較佳邊優先之隨 機 建 構 法 與 參 考 較 佳 邊 之 隨 機 建 構 法 ,
n
1+n2+n
3=1。4.3 全域搜尋:基因演算法
本節將針對本論文所應用的基因演算法中相 關機制作一詳細說明。以下將先介紹TSP 問題路徑 解(tour)在基因演算法中的表達法,再來依本研究的 基因演算法中各相關機制被應用的順序來作相關 介紹,依序為:4.3.1 染色體編碼。4.3.2 交配機制。
4.3.3 突變機制。4.3.4 選擇機制。
4.3.1 染色體編碼(chromosome coding)
在基因演算法中,TSP 問題的路徑解我們可簡 單利用路徑節點的連結順序來表達為一條完整染 色體(chromosome)。
4.3.2 交配機制(crossover)
交配在自然界中族群的演化中扮演著結合與 傳承的重要角色,在人工系統的基因演算法中也是 如此。本論文在交配機制上採用了兩種方法,除了 一 般 熟 知 的 順 序 交 配 法(order crossover ; OX crossover)之外,另外為應用較佳邊集合來加速交配 優 質 化 的 參 考 較 佳 邊 之 順 序 交 配 法(PEOX crossover),我們將在下面的小節中依序介紹。
4.3.2.1 順序交配法(OX crossover)
順序交配法是較為傳統的交配法則,父代利用 亂數產生的單切點(cut point)將自身的基因序列一 分為二且保留切點前段給子代直接繼承,子代再利 用交互參照父代的基因特徵重組成一個完整的基 因序列,在交互參照的重組階段,如遇到不能被選 擇的基因時,則會一直嘗試下一順序的基因是否可 選擇。
以下我們利用一個簡單例子來說明順序交配 法的運作過程,見圖 11,在例子中,我們產生一 隨機切點位置,由切點位置將父代 A 與父代 B 的 基因序列一分為二,子代直接繼承對應父代前半段
,如子代A 繼承父代 A 的基因序列(1,3,5),子代 B 繼承父代B 的基因序列(2,1,7),而子代的後半段基 因序列將利用另一個父代的基因序列為參考來挑 選,如子代A 前半段的最後一個基因為 5,此時將 從父代B 基因序列中為 5 的基因位置往下一基因尋
找,遇到未被選取基因即可加入子代A 的基因序列 中,如遇到已選過基因,像子代 A 在挑選基因 2 之後的基因時,會遇到已選過之基因1,此時便會 跳過基因1 而往下一個基因尋找,也就是基因 7。
再來經由上述過程不斷的重覆,直到所有子代都完 成完整的基因序列組合為止,才算完成一次的交配 運作。
圖 12 參考較佳邊之順序交配法運作範例
4.3.2.2 參考較佳邊之順序交配法(PEOX
crossover)
參考較佳邊之順序交配法是結合較佳邊集合 以增進順序交配法之子代獲得較多優良基因特徵 所設計的方法,它與順序交配法相似,但在交互參 照的重組階段,如果遇到不能選擇的基因時,將先 參考較佳邊集合並最多二次任意選擇一個可能較 佳的基因作為重組基因的選擇,以增加較多優良基 因特徵的獲得,但如果依舊挑到不能選擇的基因,
就會直接嘗試下一序列的基因是否可選擇且不斷 嘗試直到出現可選基因之後,才會再重新啟用參考 較佳邊的選擇規則。
以下我們利用一個簡單例子來說明參考較佳 邊之順序交配法的運作過程,見圖 12,在例子中,
我們產生一隨機切點位置,由切點位置將父代A 與 父代B 的基因序列一分為二,子代直接繼承對應父 代前半段,如子代A 繼承父代 A 的基因序列(1,3,5),
子代B 繼承父代 B 的基因序列(2,1,7),而子代的後 半段基因序列將利用另一個父代的基因序列為參 考來挑選,如子代A 前半段的最後一個基因為 5,
此時將從父代B 基因序列中為 5 的基因位置往下一 基因尋找,遇到未被選取基因即可加入子代A 的基 因序列中,如遇到已選過基因,像子代A 在挑選基 因2 之後的基因時,會遇到已選過之基因 1,此時 會在較佳邊集合中最多二次隨機挑選一個與節點2 相關的候選節點,在例子中是挑選到邊(6,2),所以 找到的基因為基因6,而基因 6 也未被選過,因此 能將基因6 放入子代 A 中,此時會從基因 6 再往後 尋找未選過基因。可是如未能在候選節點中選到可 用的節點,則將直接從剛才遇到已選基因的位置不 斷往後尋找,直到取得一個可選取的基因為止,才
會重新啟用參考較佳邊的選擇規則。再來經由上述 過程不斷的重覆,直到所有子代都完成完整的基因 序列組合為止,才算完成一次的交配運作。
最後本論文為了不讓交配機制的收斂效果太 過強烈,將採用較高機率
r
使用順序交配法與較低 機 率 使 用 參 考 較 佳 邊 之 順 序 交 配 法 , 其 中1
r
21 2
1
r r =
1
+
。4.3.3 突變機制(mutation)
突變在演化過程中是扮演著重生的機制,突變 發生的時間與程度將決定演化過程中是否能跳脫 自身束縛並成就新的開始。而本論文的突變機制直 接引用ANGEL[30]的突變機制設計,即利用每個基 因之間相互親疏關係來決定是否保留該段的基因 特徵,換句話說就是依每個節點的鄰近關係
x
來作 為決定路徑解邊是否被保留。然而在路徑解邊可依 鄰近關係被保留時,仍有一定機率x
2被刪除。圖 13 突變機制運作範例
以下我們利用一簡單例子來清楚說明整個突 變機制的作法,見圖 13,先利用節點鄰近表的資 訊,將挑選出來的染色體序列依突變規則將可能較 差的基因特徵刪去,如例子中刪去的(6,1)、(7,2)、
(4,6),再隨機將各個基因片段重新組合起來,如例 子中(1,3)與(2,4)重組成(1,3,2,4) 基因片段與(6)與 (5,7)重組成(6,5,7)基因片段,直到將所有的片段完 成組合,便完成一次突變機制的運作。
本研究的突變機制其啟動條件是在於新生的 路徑解無法優於現行最佳的路徑解並利用區域搜 尋也無法突破自身的劣勢時,將以一定機率
x
3進行 突變。4.3.4 選擇機制(selection)
選擇機制是為了新一代演化所作的篩選動作,
藉由保留較佳的染色體使得下一世代能有更強的 競爭優勢。本論文在完成每一代的基因交配與突變 動作後,所產生的子代數量與父代數量相同,為此 我們必須從中挑選出較佳的染色體,也就是路徑解,
使染色體數量回歸於演化開始的規模大小,以免存 在過多的太差染色體而使得演化力量被分散。
本研究為了能強化每一代的演化動力,採用的 選擇策略是保留三種不同特性的族群:優勢族群、
一般族群與新生族群。顧名思義,優勢族群是指在 完成一代的交配演化後,最佳且不重覆之百分比
g
1 數量的優良染色體,而一般族群是指除了優勢族群外,任意挑選出百分比
g
2數量的染色體而形成,新 生族群則是依百分比g
3的數量重新產生的新染色 體,本研究希望透過保留這三種族群的作用下,能 帶給下一世代足夠的演化動力與優勢。此外,新生 族群的產生是應用較佳邊優先之隨機建構法與參 考較佳邊之隨機建構法兩者比率各半來產生的。4.4 區域搜尋:LKH 演算法
本論文為了讓較佳邊集合能發揮最大的效用,
因此採用LKH[17]演算法作為本研究的區域搜尋法。
本研究的區域搜尋法與原始LKH不同之處是,利用 了 最 佳 邊 集 合 來 取 代 原 本LKH 的 候 選 邊 集 合 (candidate set),使本研究的基因區域搜尋法能達到 整體搜尋的一致性,進而整合出更強的搜尋力量。
本研究之區域搜尋法的設定是採用循序 5-opt 與非循序 4-opt 作為節點順序重排機制的換邊規則,
以有效利用 LKH 重覆修正的特性來獲得更好的路 徑解改善效果。特別說明的是,循序 5-opt 是指換 邊次數最大為5 次,而非每次 5-opt 運作都會完全 換掉5 條邊。
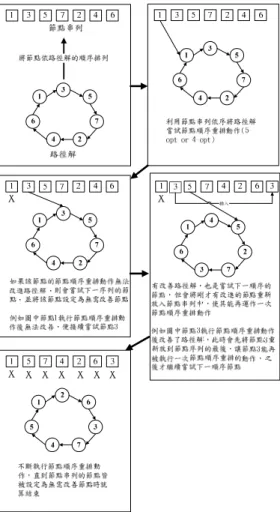
以下我們簡略地利用 LKH 運作過程來說明何 謂LKH 重覆修正的特性。基本上,在 LKH 開始執 行節點順序重排機制時,LKH 會依序以路徑解的每 個節點作為嘗試節點順序重排動作的出發點,在以 該節點作完一次節點順序重排動作後,如能成功改 進路徑解的話,該節點未來將會被重新執行節點順 序重排動作,如圖 14 所示。此外 LKH 的節點順序 重排機制依換邊規則的不同,分成循序節點順序重 排與非循序節點順序重排二種獨立的運作階段,每 個運作階段都是一次完整的節點順序重排機制運 作,在 LKH 運作的一開始先會進入循序節點順序 重排階段,在循序節點順序重排階段完成之後,才 接著運作非循序節點順序重排階段,此時如果在非 循序節點順序重排階段裡能改善路徑解的話,LKH 將又會回到循序節點順序重排階段的運作,否則才 會停止此次LKH 的運作。所以 LKH 乃是藉由上述 不斷重覆的節點順序重排機制來達到極佳的路徑 解改善效果,因此本研究也利用 LKH 此一特性來 使得較佳邊集合能發揮最大效益。
圖 14 LKH 之節點順序重排機制運作過程
4.5 較佳邊集合的進退場機制
較佳邊集合在本研究中代表著較小而有效的 搜尋範圍,而這個有效的搜尋範圍在初始時卻難以 涵蓋所有最佳解邊,藉由第三節中表 2 的數據可看 出,雖然應用有限次數的取邊動作來取得大部分的 最佳解邊,可是仍會有遺漏的最佳解邊未能在有限 次數裡被收集到。因此如何收集一開始遺漏的最佳 解邊,來充實較佳邊集合的可靠度是十分重要的。
在此為使加入集合的邊能保持一定品質的前 提之下,我們藉由以下兩種條件的進場機制來收集 可能的較佳邊:
1. 突破本演算法到目前所找到之最佳解的新 路徑解。
2. 基因演化過程中每隔 代,最佳且不重覆 之百分比 數量的路徑解。
t
1t
23
t
33
u
12
3
所以只要符合上述任一條件的路徑解都會加
入較佳邊集合中,並會依加入情況的不同來調整原 本較佳邊子集合的序列。所謂加入情況不同是指加 入的邊為新邊或是已存在邊。如果為新邊的話,將 會放置於該相關節點的較佳邊子集合裡的第一順 位,其餘的較佳邊依原本順序退後一位。如果是已 存在邊
,便會提升一次該相關節點的較佳邊子集合裡的原 本順位,只要升到第一順位後,便不會再被提升。
特別注意的是,新邊的放置優先權大於已存在邊的 提升權。
另一方面,較佳邊集合在經過多次增邊動作之 後,必定容易存在過多不必要的邊而拖延搜尋的時 間。因此為了能保持較佳邊集合的數量,我們設定 以下條件的退場機制來刪去集合中較無貢獻的較 佳邊:
1. 基因演化過程中每隔
t
代,在這 代之間皆 無任何貢獻度的較佳邊。而為了減少可能發生的誤刪機率,要設法讓集 合裡的較佳邊都能被充分檢驗其貢獻度,因此
t
的 設定就要能充份保留適當的檢驗緩衝時間。4.6 強化搜尋架構的設定
為了提升本研究搜尋架構的求解效能,以下我 們針對搜尋效能與突破區域最佳解等二方面作一 簡單的補強設定。
在搜尋效能方面,為了避免較佳邊集合在初始 建構階段取得過多不必要的邊使得搜尋速度遲緩。
在產生初始路徑解時,只針對當中最好的路徑解執 行較佳邊集合的進場機制,而非所有的初始路徑解 都會執行。
而突破區域最佳解的設定是如果連續 代無 法改進時,在該代執行完選擇機制之後,會依據以 下二個條件來作變動後,才會進入下一代的演化過 程:
1. 如果較佳邊集合總量小於
u
倍的問題 規模時,會將初始時的較佳邊集合加入 現在的較佳邊集合。2. 除了保留最好且不重覆之百分比
u
數 量的路徑解,剩餘各半皆由較佳邊優先之隨機建構法與參考較佳邊之隨機建構 法重新產生。
五、實驗結果與討論
本研究已將前述所提出之演算法利用C語言實 作成單CPU核心運行的程式,測試平台為個人電腦,
其備配為Intel Core2 Due E6320 1.86GHz CPU、4GB 主 記 憶 體 , 作 業 系 統 :Windows XP 、 並 針 對 TSPLIB[28]之 35 題進行實驗。
5.1 實驗參數
實驗參數這一小節將條列出本研究架構中所 有的參數設定:
1. 初始族群數量(initial population size):數 量
m
=50。2. 較佳邊集合(promising edge set ; PES):最 小生成樹取邊次數
p
=3。3. 初始解建構法:
A. 較佳邊優先之貪婪建構法:初始族 群數量百分比 n1=20%
i. 優先嘗試較佳邊子集合裡排序 第 一 的 候 選 節 點 機 率
=70%。
k
1ii. 隨機嘗試較佳邊子集合裡候選 節點機率
k
2=30%。B. 較佳邊優先之隨機建構法:初始族 群數量百分比 n2=40%,其餘設定 與 較 佳 邊 優 先 之 貪 婪 建 構 法 相 同。
C. 參考較佳邊之隨機建構法:初始族 群數量百分比 n3=40%
i. 隨機選擇一個位於較佳邊子集 合 裡 的 候 選 節 點 機 率
=80%。
k
3ii. 隨機選擇一個未被選節點機率
=20%。
k
44. 交配機制(crossover):
A. 採用順序交配法機率
r
1=90%。B. 採用參考較佳邊之順序交配法機
率
r
2=10%。1
5. 突變機制(mutation):
x
=3。A. 節點鄰近關係
B. 節點邊有鄰近關係但依舊刪除機 率
x
2=20%。C. 突變機制發動機率
x
3=10%。6. 選擇機制(selection):
A. 優勢族群的數量比例
g
1=20%。B. 一般族群的數量比例
g
2=40%。C. 新生族群的數量比例
g
3=40%。7. 較佳邊集合進退場機制:
A. 進場機制:
i. 進場代數
t
1=4。2
3
1
2
3
ii. 最佳且不重覆的路徑解數量比 例
t
=10%。B. 退場機制:
i. 退場代數
t
=8。8. 強化搜尋架構的設定:
A. 突破區域最佳解:
i. 持續未改善代數
u
=4。ii. 較佳邊集合總量小於問題規模 倍數
u
=1.6。iii. 保留最好且不重覆的路徑解數 量比例
u
=20%。5.2 實驗結果
本節將針對本研究所提出的由較佳邊集合引 導之基因區域搜尋法(Promising Edge Set Guided Genetic Local Search Algorithm ; PESGLS)進行實驗
,本實驗分成兩部分,第一為測試PESGLS 是否比 LKH 演算法更具求解能力,第二為實驗 PESGLS 應 用 於 旅 行 推 銷 員 問 題(Traveling Salesman Problem ; TSP)求解品質與效能。
在表 3 中,我們利用較大規模的 TSP 問題 5 題,於本研究測試平台下執行 PESGLS 與 LKH,
由於PESGLS 與 LKH 的代數設定機制不同,無法 簡單以執行一代的結果作為比較基礎,因此改由以 PESGLS 執行一代的時間為基準,LKH 也以同等時 間執行後再比較其結果。以下依序說明表 3 中各欄
表 3. PESGLS 與 LKH 測試 TSBLIB 大題組的實驗結果
位代表的意義,Instance 欄位是代表 TSPLIB 中的 題目代號。Opt Length 欄位是指該題目的最佳解路 徑長度。PESGLS 欄位下的 Tour Length 欄位是在 PGLES 執行完一代後最好的路徑解長度,%Opt 欄 位為PESGLS 的 Tour Length 超過 Opt Length 的百 分比,%Opt 正數代表 PESGLS 的 Tour Length 大於 Opt Length。CPU Time 欄位為 PESGLS 執行完一代 的時間。LKH 欄位下的 Tour Length 欄位是 LKH 在執行PESGLS 一代的時間內最好的路徑解長度。
%PESGLS 欄位為 LKH 的 Tour Length 超過 PESGLS 的Tour Length 的百分比,%PESGLS 正數代表 LKH 的Tour Length 大於 PESGLS 的 Tour Length。Block Time 欄位是指 LKH 在 PESGLS 執行一代的時間內
最好的路徑解出現的時間。表 3 的時間單位以秒為 單位。
從表 3 中發現 PESGLS 與 LKH 在同等的時間 求解限制下,PESGLS 在測試的 5 題中能皆表現出 較佳的效果,從LKH 的 Block Time,我們也可發 現 LKH 容易掉入區域最佳解而難以跳脫,而 PESGLS 雖然應用 LKH 作為區域搜尋法,但結合 全 域 搜 尋 的 機 制 與 較 佳 邊 集 合 的 優 點 , 使 得 PESGLS 表現出較好的求解能力。
表 4 是利用TSPLIB問題規模大於 500 且小於 4000 的題目 30 題作為評比求解效能與計算時間的 標準,除了PESGLS與LKH[17]的實驗結果比較之 外 , 在 此 我 們 也 與 目 前 品 質 與 效 能 比 較 佳 的
表 4. 針對 TSPLIB 題目規模大於 500 小於 4000 的題組
,應用PESGLS、ANGEL 與 LKH 之實驗結果
ANGEL[30]演算法之實驗數據作一比較,藉由目前 表現較好的演算法來有效評估PESGLS。PESGLS 於本研究測試平台下執行,ANGEL與LKH運作測 試平台為Intel Pentium 2.0 GHz CPU和 1GB主記憶 體,雖然兩者之測試平台略有差異,但利用本研究 測 試 平 台 上 測 試LKH 求 解 所 得 的 實 驗 數 據 與 ANGEL報告中LKH的實驗數據進行比較,發現兩 者時間的差異不到 5%,因此本研究的實驗結果並 不作任何的效能差異修正。以下依序說明表 4 中各 欄位代表的意義,Instance欄位是代表TSPLIB中的 題目代號。n欄位是指該題目的規模大小。Success 欄位下的分母代表解題的總次數,分子則代表成功 的次數。Gapavg與Gapmax欄位是指最佳路徑解與最 佳解之間差距佔最佳解長度百分比於總解題次數 下的平均值與最大值,上述最佳路徑解是指完成一 次題目求解結束時最好的路徑解。Timemin與Timeavg
欄位是指在總解題次數中單次求解達到停止條件 的最短時間和各次求解達到停止條件的平均時間。
表 4 的時間單位以秒為單位。
從表 4 結果中可發現,針對測試題組而言,
PESGLS 的求解成功次數已可達百分之百,與 ANGEL 的求解能力相當,而 LKH 則有相當多次無 法求解成功,由此可證實PESGLS 的求解穩定度較 佳於LKH。在求解效率的比較結果中,PESGLS 針 對測試題組幾乎皆能比 LKH 的求解效率結果來得 更好。而與ANGEL 相比之下則是互有優劣,於是 本研究也針對PESGLS 表現較差的題組作了分析,
發現 PESGLS 對於在初始階段有較多最佳解邊沒 被取得的題目,在效能表現上有較多需要努力的空 間,不過相對地只須透過適量的廣域搜尋的題目,
PESGLS 的效能表現就較為優異。由上述分析的結 果彰顯出較佳邊集合之進退場機制的有效性,將足 以左右 PESGLS 的求解效率。不過總體而論,
PESGLS 在應用於求解 TSP 問題的效能與品質表現 仍是相當不錯的。
六、結論與未來研究方向
本論文所提出之由較佳邊集合引導之基因區 域 搜 尋 法 , 在 求 解 旅 行 推 銷 員 問 題(Traveling
Salesman Problem ; TSP)上得到不錯的成效。經由實 驗結果證明,較佳邊集合導引之基因區域搜尋法能 夠更集中搜尋的力量以提升求解速度,此外也藉由 較佳邊集合有效連結了全域搜尋與區域搜尋的合 作機制,使其兩者相輔相成達到更完善的搜尋效果 與求解品質。
然而本論文須要改善的部分是求解時間的方 面,在實驗結果中我們可發現對於不少一開始較佳 邊集合較差的題目,其解題時間與ANGEL[30]相比 仍花費較多的搜尋時間。因此我們針對本研究架構 中能加強效能的部分,提出以下四點作為未來研究 方向:
1. 建構出更好的進場機制,以免容易因一 開始設定的門檻限制過高而使得後續的 收集邊的困難度增加。因為本研究架構 主要依賴目前找到的最佳解被突破時執 行收邊的進場機制,收到的邊雖然可能 較佳,但也容易收不到可能是不錯的 邊。
2. 設計較為精準的退場機制,以減少非最 佳解的邊進入較佳邊集合中存在過久,
而增加無效的搜尋時間。
3. 分析設計能預測較佳邊落點的機制,來 加速找到必須強化的搜尋範圍。
4. 組合不同特性的區域搜尋法或啟發式演 算法,來改善單一搜尋法可能產生的盲 點。
相信未來研究如能強化上述四點,必能提升本 研究之基因區域搜尋法求解TSP 問題的效率。
最後,我們未來也將嘗試應用本研究之基因區域搜 尋法於求解排程問題(Scheduling Problem )、車輛巡 迴問題(Vehicle Routing Problems )等 TSP 問題的延 伸題型上,因為透過本研究的實驗結論,我們更有 信心能將本研究的求解經驗與設計機制轉移到上 述相似性質的問題,期待最後能提供上述各類問題
一個更有效且更穩定的求解機制。
致謝
本 論 文 之 研 究 經 費 由 國 科 會 在 計 畫 編 號 NSC96‐2628‐E‐005‐074‐MY3 下部分補助,作者在此 特別致上感謝。
七、參考文獻
[1] E. H. L. Aarts and H. P. Stehouwer, “Neural networks and the traveling salesman problem,” Proceedings of the International Conference on Artificial Neural Networks, Springer-Verlag, 1993, pp. 950-955.
[2] J. R. A. Allwright, and D. B. Capenter, “A distributed implementation of simulated annealing for the traveling salesman problem,”
Parallel Computing, vol. 10, pp. 335-338, 1989.
[3] R. Baraglia, J. I. Hidalgo, and R. Perego, “A hybrid heuristic for the traveling salesman problem,” IEEE Transactions on Evolutionary Computation, vol. 5, no. 6, pp. 613-622, December 2001.
[4] F. Bock, ‘‘An algorithm for solving traveling-salesman and related network optimization problems,’’ unpublished manuscript associated with talk presented at the 14th ORSA National Meeting, 1958.
[5] M. Barrie, Baker, and M.A. Ayechew, “A genetic algorithm for the vehicle rounting problem,” Computer and Operational Research., Vol. 30, pp. 787-800, 2003.
[6] F. Croce, R. Tadei, and G. Volta, “A genetic algorithm for the job shop problem,”
Computers and Operational Research., Vol.
22, pp. 15-24, 1995.
[7] N. Christofides, ‘‘Worst-case analysis of a new heuristic for the traveling salesman problem,’’
Report No. 388, GSIA, Carnegie-Mellon University, Pittsburgh, PA, 1976.
[8] G. Clarke AND J. W. Wright, ‘‘Scheduling of vehicles from a central depot to a number of delivery points,’’ Operations Research, vol. 12, pp. 568-581, 1964.
[9] G. A. Croes, ‘‘A method for solving traveling salesman problems,’’ Operations Research , vol. 6, pp. 791-812, 1958.
[10] M. Dorigo, L. M. Gambardella, ‘‘Ant colony system: A cooperative learning approach to the traveling salesman problem, ’’ IEEE Transactions on Evolutionary Computation, vol. 1, no. 1, pp. 53-66, April 1997.
[11] R. Durbin, R. Szeliski, and A. Yuille, “An analysis of the elastic net approach to the traveling salesman problem,” Neural Computation, vol. 1, pp. 348-358, 1989.
[12] L. Fiechter, “A parallel Tabu search algorithm for large traveling salesman problems,”
Discrete Applied Mathematics and Combinatorial Operations Research and Computer Science, vol. 51, pp. 243-267, 1994.
[13] B. Freisleben and P. Merz, ‘‘A genetic local search algorithm for solving symmetric and asymmetric traveling salesman problems,’’
Proceedings of the 1996 IEEE International Conference on Evolutionary Computation, 1996.
[14] B. Freisleben and M. Schulte. “Combinatorial optimization with parallel adaptive threshold accepting”. Proceedings of the 1992 European Workshop on Parallel Computing, Barcelona, IOS Press, 1992, pp. 176-179.
[15] L. M. Gambardella and M. Dorigo, “Ant-Q: A reinforcement learning approach to the traveling salesman problem," Proceedings of the Twelfth International Conference on Machine Learning, 1995, pp. 252-260.
[16] M. R. Garey and D. S. Johnson, Computers and
Intractability: A Guide to the Theory of NP-Completeness. Freeman, New York, 1979.
[17] K. Helsgaun, “An effective implementation of the Lin–Kernighan traveling salesman heuristic,” European Journal of Operations Research, vol. 126, pp. 106-130, 2000.
[18] J.H. Holland, Adaptation in Nature and
Artificial Systems, University of Michigan
Press. 1975.[19] L. Homaifar, C. Guan, and G. Liepins, “A new approach to the traveling salesman problem by genetic algorithms," Proceedings of the 5th International Conference on Genetic Algorithms, Morgan Kaufmann Publishers, 1993, pp. 460-466.
[20] O. Jellouli, E. Chatelet, “A dynamic programming approach to sequencing problems,” SLAM Review.10, pp.196-210, 2000.
[21] D. S. Johnson, L. A. McGeoch, “The traveling salesman problem: A case study in local optimization,” in Local Search in
Combinatorial Optimization, E. H. L. Aarts
and J. K. Lenstra, Eds. , New York: Wiley:New York, 1997.
[22] E. Lawler, J. K. Lenstra and D. B. Shmoys, The
Traveling Salesman Problems: A Guided Tour of Combinatorial Optimization. Wiley, 1985.
[23] S. Lin, ‘‘Computer solutions of the traveling salesman problem,’’ Bell System Technical Journal, vol. 44, pp. 2245-2269, 1965.
[24] S. Lin , B. W. Kernighan, ‘‘An effective heuristic algorithm for the traveling-salesman problem,’’ Operations Research, vol. 21, pp.
498-516, 1973.
[25] P. Merz and B. Freisleben, ‘‘Genetic local search for the TSP: New results,’’ Proceedings of the
1997 IEEE International Conference on Evolutionary Computation, 1997.
[26] J. W. Pepper, B. L. Golden, and E. A. Wasil,
“Solving the traveling salesman problem with annealing-based heuristics: a computational study,” IEEE Transactions on Systems, Man, and Cybernetics, Part A, vol. 32, no. 1, pp.
72-77, January 2002.
[27] J. Perttunen, “On the significance of the initial solution in traveling salesman heuristics,”
Journal of the Operational Research Society, vol. 45, pp. 1131-1140, 1994.
[28] G. Reinelt, “TSPLIB – A traveling salesman problem library,” ORSA Journal of Computing, vol. 3, no. 4, pp. 376-384, 1991.
[29] T. Starkweather, D. Whitley, C. Whitley, K.
Mathial, “A comparison of genetic sequencing operators,” Proceedings of the 4th International Conference on Genetic Algorithm, Morgan Kaufmann, 1991, pp.
69-76.
[30] L. Y. Tseng and S. C. Liang, “A Hybrid Metaheuristic and Its Application to the Traveling Salesman Problem,” Submitted to IEEE Transactions on Evolutionary Computation. (Revised) (SCI), 2007.
[31] T. Volgenant, R. Jonker , ”A branch and bound algorithm for the symmetric traveling salesmane problem based on the 1-tree relaxation,” European Journal of Operational Research.9, pp. 83-89,1982.
![圖 5 次梯度最佳化演算法虛擬碼 (出處: K. Helsgaun, An effective implementation of the Lin–Kernighan traveling salesman heuristic [17])](https://thumb-ap.123doks.com/thumbv2/9libinfo/9471409.586120/8.892.470.762.281.555/圖5次梯度最佳化演算法虛擬碼出處KHelsgaunAneffectiveimplementationoftheLinKernighantravelingsalesmanheuristic17.webp)