碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
無人機航拍之空中三角測量精度與控制配置探討 A Study of Aerial Triangulation and Ground control point
Arrangement in UAS photogrammetry
陳昱芸 Yu-Yun Chen
指導教授:徐百輝 教授 Advisor: Pai-Hui Hsu, Ph.D.
中華民國 104 年 8 月
August 2015
中文摘要
基於無人機航拍技術的蓬勃發展,目前市面上已有許多特別針對UAS 影像進 行後續解算處理並產製相關應用產品(正射影像、DEM/DSM、等高線、密點雲模 型)的商業軟體,是以空三方位解算成果的精度深刻影響著後端產品的精度。國 內在傳統航測作業上對於控制點之佈設位置與數量已有明確的規範加以訂定(如:
內政部基本圖測製規範),但針對 UAS 作業卻無相關規範可供遵循,且各商業軟 體中也幾乎未對控制點的需求有詳細說明。
本研究試圖以實際資料驗證控制點佈設密度對成果解算精度之影響,並考量 不同商業軟體之解算模式對控制點的需求及敏感程度可能會有所差異,茲以目前 市面上基於攝影測量或電腦視覺不同解算模式原理之商業軟體(基於作業資源考 量,選定EnsoMOSAIC、ORIMA、Pix4D、APS)進行實驗及分析,期能在實務作 業上提供最佳的控制配置方案。相關結論與建議乃基於本次實驗之成果。
關鍵字
:無人飛行載具系統、地面控制點、空中三角測量。ABSTRACT
Benefited from the newly developed UAS photogrammetry technology, commercial softwares converting images into photogrammetry productions such as orthophotos, DEM/DSM, contour lines, dense matching models are available. The quality of photogrammetric productions is directly related to the results of the aerotriangulation adjustment of UAS photogrammetry. Regulations about arrangement of ground control points (GCPs) in traditional photogrammetry are announced by National Land Surveying and Mapping Center, Ministry of the Interior (NLSC) for years. With regard to UAS, none of related regulations allows users to follow. In this paper, influence of different arrangement in GCPs with different commercial softwares are presented. All the execution models of the softwares are based on bundle adjustment with self-calibration or/and computer vision. The experiment results show the most appropriate methodology of different commercial software. Finally, conclusions and suggestions are illustrated based on the experiment results.
Keywords
: Unmanned Aerial Vehicle System (UAS), Ground Control Point, Aerotriangulation.目 錄
口試委員會審定書………i
中文摘要 ... ii
ABSTRACT ... iii
目 錄 ... iv
表 目 錄 ... vi
圖 目 錄 ... vii
第一章 緒論 ... 1
1-1 研究動機與目的 ... 1
1-2-1 傳統攝影測量模式之相關研究 ... 3
1-2-2 電腦視覺模式之相關研究 ... 3
1-3 研究方法與流程 ... 5
1-4 論文架構 ... 7
第二章 UAS 影像解算模式 ... 8
2-1 傳統航測之空中三角測量模式 ... 8
2-1-1 光束法平差模式 ... 8
2-1-2 附加參數的自率光束法平差 ... 10
2-2 電腦視覺解算模式 ... 14
2-3 傳統航測與電腦視覺解算模式之比較 ... 20
第三章 實驗配置與使用軟體 ... 24
3-1 使用軟體(EnsoMOSAIC、ORIMA、Pix4D、APS)簡介與比較 ... 24
3-1-1 軟體簡介 ... 24
3-1-2 操作程序與輸出成果及報表之比較 ... 30
3-2 實驗場資料與實驗配置 ... 37
3-2-1 實驗場資料背景說明 ... 37
3-2-2 本研究規劃之實驗配置 ... 39
第四章 實驗結果與分析 ... 43
4-1 加入附加參數求解像機參數之影響性評估 ... 43
4-1-1 各軟體之附加參數模型說明 ... 43
4-1-2 各軟體之加入附加參數模型解算成果比較(僅 EnsoMOSAIC、ORIMA 具備) ... 46
4-2 空中三角測量網形與連結點可靠度分析 ... 50
4-2-1 可靠度指標分析 ... 50
4-2-2 空三網形圖分析 ... 53
4-3 空中三角測量檢核點絕對精度之比較 ... 58
4-4 方位參數解算成果之比較 ... 80
4-4-1 像機內方位參數之比較 ... 80
4-4-2 投影中心外方位參數之比較 ... 82
4-5 正射影像絕對精度之比較 ... 86
4-5-1 各軟體之正射影像作業說明 ... 86
4-5-2 各軟體之正射影像精度評估 ... 91
4-5-3 數值地表模型(DSM)之比較 ... 93
4-6 本實驗場資料下四套軟體之最佳控制配置建議 ... 96
第五章、結論與建議 ... 99
5-1 結論 ... 99
5-2 建議 ... 104
參考文獻 ... 106
表 目 錄
表2-1-1、四套軟體之附加參數自率模型 ... 11
表2-3-1、傳統航測與電腦視覺解算模式之比較 ... 22
表3-1-1、本實驗使用四個軟體所輸出空三報表之資訊比較 ... 34
表3-1-2、本次實驗所引用四種軟體之分析比較 ... 36
表3-2-1、實驗配置諸元 ... 38
表3-2-2、本實驗規劃引用之控制配置方案說明 ... 39
表4-1-1、各配置於 ENSO、ORIMA 不同自率模式解算之SIGMA0 值 ... 47
表4-2-1、連結點強度標準 ... 50
表4-2-2、點位類型數量統計及相關指標 ... 52
表4-2-3、各軟體中各等級的連結點數量統計 ... 57
表4-3-1、GPS 加入空三平差計算前後之成果比較 ... 67
表4-4-1、各實驗配置之像機內方位較差統計 ... 82
表4-4-2、各項配置下投影中心外方位解算成果差值統計表 ... 84
表4-5-1、各項軟體及配置之正射成果誤差統計量 ... 93
表4-6-1、各軟體之建議控制配置評估表 ... 97
表5-1-1、APS 像機參數率定前、後成果精度差異 ... 102
圖 目 錄
圖1-1-1、傳統航測下的控制點佈設方式 ... 2
圖1-3-1、實驗流程圖 ... 6
圖2-1-1、共線關係說明圖 ... 8
圖2-2-1、核線幾何關係圖[D.FORSYTH AND J.PONCE,2003.] ... 14
圖2-2-2、SFM 計算程序流程圖 ... 19
圖2-3-1、傳統航測連結點分布示意 ... 21
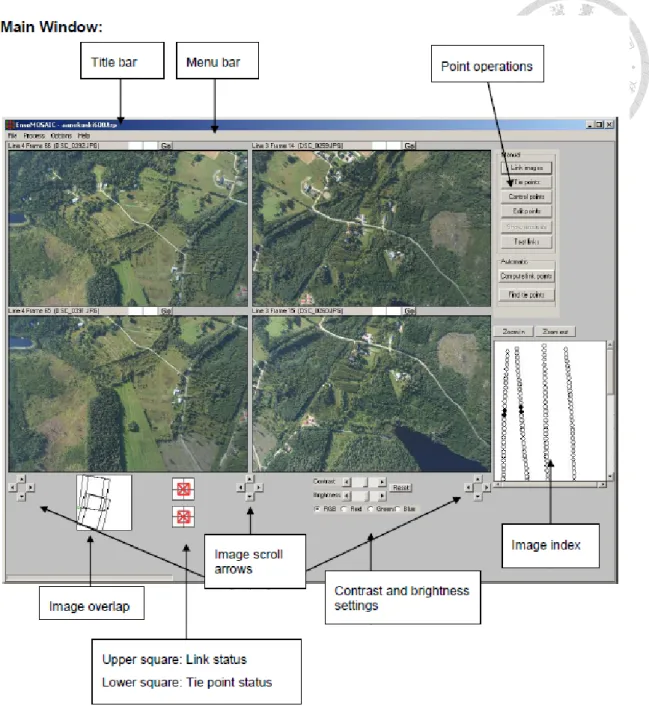
圖3-1-1、ENSOMOSAIC7.5 主要操作介面 ... 25
圖3-1-2、ORIMA 主要操作介面 ... 27
圖3-1-3、PIX4D 主要操作介面 ... 29
圖3-1-4、APS 主要操作介面 ... 30
圖3-1-5、目前商用軟體之 UAS 空三解算流程圖 ... 31
圖3-1-6、APS 提供之影像匹配策略選項 ... 32
圖3-1-7、PIX4D 空三網形評估資訊 ... 33
圖3-1-8、ORIMA 提供空三報表輸出選項 ... 34
圖3-2-1、校正場(南投南崗工業區)相關說明 ... 37
圖3-2-2、幾何校正標樣式 ... 38
圖3-2-3、本實驗之影像分布 ... 39
圖3-2-4、不同控制點分布之配置規劃 ... 41
圖3-2-5、本實驗空三精度檢核點之分布 ... 41
圖3-2-6、本實驗正射精度檢核點之分布 ... 42
圖4-1-1、PIX4D 之像機參數模式 ... 44
圖4-1-2、ORIMA 之附加參數設定方式 ... 44
圖4-1-3、ENSOMOSAIC 空三報表中之像機參數 ... 46
圖4-1-4、ENSOMOSAIC 不同自率模式成果之精度分析 ... 48
圖4-1-5、ORIMA 自率與否模式成果之精度分析 ... 49
圖4-2-1、各軟體各光線重點數所佔百分比統計 ... 51
圖4-2-2、ENSOMOSAIC 提供的網形圖分析 ... 53
4-2-3、ORIMA 提供的網形圖分析 ... 54
圖4-3-2、不同軟體之控制點解算成果精度比較 ... 60
圖4-3-3、ENSOMOSAIC 之各項配置解算成果之誤差統計 ... 61
圖4-3-4、測區弱網形處的實際匹配情形(航帶間幾乎沒匹配點) ... 62
圖4-3-5、ENSOMOSAIC 不同控制配置間之精度差異分析 ... 63
圖4-3-6、ENSOMOSAIC 之各項配置誤差向量圖 ... 65
圖4-3-7、ORIMA 之各項配置解算成果之誤差統計 ... 65
圖4-3-8、ORIMA 不同控制配置間之精度差異分析 ... 68
圖4-3-9、ORIMA 之各項配置誤差向量圖 ... 70
圖4-3-10、PIX4D 之各項配置解算成果之誤差統計 ... 70
圖4-3-11、PIX4D 不同控制配置間之精度差異分析 ... 73
圖4-3-12、PIX4D 針對控制點配置之建議與案例說明 ... 73
圖4-3-13、PIX4D 之各項配置誤差向量圖 ... 75
圖4-3-14、APS 之各項配置解算成果之誤差統計 ... 75
圖4-3-15、APS 針對控制點標記方式 ... 76
圖4-3-16、APS 不同控制配置間之精度差異分析 ... 77
圖4-3-17、APS 於各項配置空三計算後之控制點評估 ... 78
圖4-3-18、APS 之各項配置誤差向量圖 ... 80
圖4-4-1、APS 率定作業前後之像機參數 ... 81
圖4-4-2、各項軟體與配置之像機內方位較差統計 ... 81
圖4-4-3、各項配置下投影中心外方位解算成果差值統計 ... 84
圖4-4-4、ORIMA、PIX4D 之內、外方位參數較差比對 ... 86
圖4-5-1、LPS 之 DTM 產製參數設定介面 ... 87
圖4-5-2、於 LPS 中以不同 DTM 產製之正射影像 ... 87
圖4-5-3、LPS 正射影像需調整鑲嵌線之案例 ... 88
圖4-5-4、ENSOMOSAIC 正射影像需調整鑲嵌線之案例 ... 89
圖4-5-5、ENSOMOSAIC 之 DEM、正射影像產製參數設定介面 ... 89
圖4-5-6、PIX4D 正射影像抖動扭曲之案例 ... 90
圖4-5-7、PIX4D 之 DEM、正射影像產製參數設定介面 ... 90
圖4-5-8、APS 之正射影像鑲嵌線 ... 91
圖4-5-9、APS 正射影像需調整鑲嵌線之案例 ... 91
圖4-5-10、不同軟體及控制配置之正射影像精度分析 ... 92
圖4-5-11、各項 DSM 成果與剖面成果 ... 95
圖4-5-12、各項 DSM 成果套疊剖面位置 ... 96
圖5-1-1、APS 像機參數率定前、後之網形及連結點品質差異 ... 102
第一章 緒論
1-1 研究動機與目的
利用無人飛行載具系統(Unmanned aircraft system, UAS)之航拍作業與傳統航 空攝影測量作業相較而言,具有高機動性、高安全性、高效率、低成本及天候限 制小等特性,由於其 時間短、且因較低空飛行,故易取得高解析度影像,在國外 已多廣泛應用於環境監測、考古選址研究、工程進度管控等領域。國內也有將UAS 運用於現地難以到達之災區勘查與災損評估、大範圍之現地調查(如:水稻田等農 作調查、蚵架與魚塭養殖調查)、或進行特定重要區域之正射影像產製,進而更新 相關圖資,甚至有些以嚴密的附加參數的自率光束法空三模式並搭配大量的地面 控制點,使得UAS 的影像可滿足立體測圖作業需求,產製高精度的三維向量圖資 (內政部國土測繪中心於 2011 年以 UAS 影像更新臺中市特三號道路圖資)。
基於 UAS 技術的蓬勃發展,目前市面上已有許多特別針對 UAS 影像進行後 續解算處理並產製相關應用產品(正射影像、DEM/DSM、等高線、密點雲模型)的 商業軟體,其多利用高重疊率的影像(基本要求為航帶內前後重疊 80%、航帶間側 向重疊60%),透過其關鍵的影像匹配技術取得大量的特徵匹配點建立影像連結關 係進行方位解算,甚至繼而進行後端的密點雲匹配,提供三維建模的參考資訊來 源,是以其方位解算成果的精度深刻影響著後端產品的精度。
與傳統航測作業影像相較,UAS 影像在空中三角測量(以下簡稱空三)平差計算
國內在傳統航測作業上對於控制點之佈設位置與數量已有明確的規範加以訂 定(如:內政部基本圖測製規範),但針對 UAS 作業卻無相關規範可供遵循,且各 商業軟體中也幾乎未對控制點的需求有詳細說明。故實務工作上,為求產製高精 度的正射影像成果,現行作業多以傳統航測上無任何GPS 輔助資訊方式之佈設大 量控制點(沿測區周圍佈設 i=2b 的全控點,並以 i=4~5b 的跨橋距橫貫測區佈設高 控鍊,如圖1-1-1)來進行規劃。由於該規劃是按傳統航測影像前後 60%、側向 30
%的重疊率設計,是否仍適用於前後 80%、側向 60%高重疊率的 UAS 影像則是 本研究想要釐清及探討的課題。
→ 航線方向
圖1-1-1、傳統航測下的控制點佈設方式
本研究試圖以實際資料驗證控制點佈設密度對成果解算精度之影響,並考量 不同商業軟體之解算模式對控制點的需求及敏感程度可能會有所差異,茲以目前 市面上基於攝影測量或電腦視覺不同解算模式原理之商業軟體(基於作業資源考量,
選定 EnsoMOSAIC、ORIMA、Pix4D、APS)進行實驗及分析,期能在實務作業上 提供最佳的控制配置方案。
1-2 文獻回顧
目前關於UAS 空三的解算模式可分為基於光束法整體平差的傳統攝影測量模 式,與基於核線幾何的電腦視覺模式。
1-2-1 傳統攝影測量模式之相關研究
基於傳統攝影測量之 UAS 空三解算中,由於像機內方位參數不穩定的問題,
多以附加參數的自率光束法平差進行空三求解,而附加參數的選定則需考慮多項 因素:(1)平差區域網的面積;(2)左右重疊(sidelap; side overlap)與飛航方向;(3)平 差的多餘觀測數;(4)每張影像上的像點數量與其分布;(5)地面控制點(ground control points, GCPs)數量與其分布;(6)系統誤差的先驗特性;(7)攝影測量系統參 數的變化情況;(8)測區內的地形起伏;(9)使用電腦的內外存容量;(10)是否進行 了預改正(pre-corection);(11)附加參數的顯著性與相關性(李德仁、袁修孝,2002)。
謝幸宜(2011)針對自率光束法有非常詳盡的分析:在像機率定作業中,除了率 定軟體外,率定場的相關條件(率定板、標點分布、標點是否隱含長度資訊等)也會 影響率定成果,且率定成果並無法真實描述航拍當時的像機內方位參數,故透過 自率光束法空三平差即能重新解算及調整像機參數的適用性,且在眾多的附加參 數模型中,以Brown(1976)所提模式具有最佳的精度。本研究希望藉由本實驗區高 重疊率的影像下,探討不同控制配置對於各軟體所提供之附加參數模式的影響 性。
1-2-2 電腦視覺模式之相關研究
al. 1998; Hall et al.,1982)。其它方法則輔以矩陣方式進行幾何約制,用以求解像機
之內部、外部參數(Faugeras and Toscani, 1986)。而後,透鏡畸變引入了兩個非線性 方程,對於影像變形則有了更精確的描述模型,部分研究認為只有徑向的鏡頭畸 變(Tsai, 1987),另一部分則認為尚存有切線方向的畸變(Weng et al.,1992)。透過率 定程序後,即可以三維光線投影至二維像平面之方式進行求解。然率定作業具有 一定的作業程序,缺乏作業彈性,且像機的光學和幾何特性可能隨著不同場景及 像機運動而呈現變動,並非一個穩定的狀態;(2)方法二則是透過建立核線幾何關 係(Faugeras, 1993) 以 及 重 建 歐 基 里 德 坐 標 系 統 (Hartley, 1993) 進 行 作 業 。 Longuet-Higgins(1981)最早提出了以核線幾何進行場景重建,之後也有許多相關的 研究在探討這個課題(Huang and Faugeras, 1989)。針對自率與未率定系統的研究中,
Faugeras et al.(1992)提出利用 Kruppa 公式求解像機內部參數為固定時的自率參 數 , 其 後 便 有 許 多 基 於 此 前 提 的 類 似 研 究(Armstrong,1996; Faugeras,1995;
Hartley,1994)。然而,有別於 Kruppa 公式解法的研究也相繼出現(Heyden and Aastrom,1996; Pollefeys and Van Gool,1998; Quan and Triggs,2000),其認為這些像機 內部參數在一連串的序列影像中並非固定不變。Hartley(1993)則提出了如何以必要 矩陣及基礎矩陣進行核線幾何的約制(Hartley et al.,1992)以及像機姿態的估計 (Hartley, 1992)。而後 Deriche et al.(1994)提出一個利用核線幾何進行共軛匹配並進 行異常值偵錯的穩健方法。藉由核線幾何的應用,可助於立體系統(Brooks et al.,1996),照像機運動(Jang and Ki-Sang,1996)和場景重構(Zhang et al.,1996)的估計
與影像匹配的簡化。由於核線幾何中解算基礎矩陣的重要性,後續則有許多致力 於提升其解算精度的研究。最經典的線性方法主要有基於最小二乘法(Zhang,1998) 和特徵值最小化(Torr and Murray,1997);其它方法則有基於通過迭代(Brady and Wiles,1996)的方法來優化線性方法;而穩健法則基於更精確的幾何檢測和匹配錯誤 濾除(Rousseeuw and Leroy,1987; Zhang,1998),之後的相關研究中仍主要針對基礎
矩陣提出新的估計方法,以改善其解算精度和並提升作業效能 (Bober et al.,1998;
Stewart,1995; Zisserman, 2000)。
1-3 研究方法與流程
在傳統航測的空三作業中,對於控制點的分布、連結點強度均有明確嚴謹的 作業規範供遵循(參閱本論文 4-2 節)。但國內目前在 UAS 的作業中尚未訂定相關 作業規範,而基於 UAS 影像的小像幅特性,現行大多以前後 80%、側向 60%的 高重疊率進行航拍,但唯獨於控制點的佈設上並無一致性的作法,且控制分布對 其成果精度的影響性,是否會因不同軟體解算模式上的不同而受影響,遂成為本 研究欲探討的課題。
本研究以不同控制密度與分布規劃了 8 種控制配置,以同樣一組實驗場資料 分別以 EnsoMOSAIC、ORIMA、Pix4D、APS 等四套軟體依各種控制配置進行空 三平差計算並產製後端的正射影像,藉由各解算成果來評估各控制配置之適用性。
實驗流程如圖1-3-1 所示,首先測試選定較佳之附加參數模式,接著評估空三解算 成果的相關網形條件與精度指標,再來針對後端產製成果之正射影像進行評估,
最後針對各軟體提出建議控制方案。
圖1-3-1、實驗流程圖
1-4 論文架構
本論文各章節編排內容如下:
第一章 緒論
提出研究之動機與目的及相關文獻,並介紹研究流程與論文架構。
第二章 UAS 影像解算模式
介紹目前UAS 影像於方位解算上的常用模式,以基於傳統航測作業模式與電 腦視覺處理模式為說明,並引入附加參數進行自率求解像機參數。
第三章 實驗配置與使用軟體
介紹本研究所使用的四套軟體特性與四者間的相關比較,並說明本研究之實 驗場資料背景特性及所規劃之不同控制配置方案與檢核點分布。
第四章 實驗結果與分析
說明本研究之各項驗證成果精度的評估方式與結果,並提供相關數據分析評 估各項控制配置之影響性,最後針對四套軟體各自提出建議的控制配置方案。
第五章、結論與建議
彙整基於本次實驗成果的作業總結,並提出後續研究與實務工作上的建議程 序。
第二章 UAS 影像解算模式
空間立體模型的重建在攝影測量中,需仰賴內方位、相對方位、絕對方位等 三步驟。傳統航測上僅需於標準點位上提取共軛像點,但基於UAS 航拍影像之內 方位未知及不穩定性,且影像畸變情形嚴重,需仰賴自率光束法來進行像機率定 及方位解算,而隨著附加參數的數量增加,影像觀測量也必須增加(劉虹妤,2000),
故多需要更大量的共軛點位來進行。在求解共軛點位的解算基礎上,概略可分為 基於共線條件的攝影測量幾何,與基於共面條件的電腦視覺核線幾何,茲分述如 下:
2-1 傳統航測之空中三角測量模式
2-1-1 光束法平差模式
在航測的基本作業原則裡,均假設光線為直線行進,因而在取像過程中,投 影中心、像點、物點三者應是共線關係(如圖2-1-1),藉由共線式的幾何關係,得 以進行空三解算、恢復方位、乃至於進行後續的立體量測。
圖2-1-1、共線關係說明圖
共線式可表示如(2-1-1)式:
11 12 13
0
31 32 33
21 22 23
0
31 32 33
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
A L A L A L
a
A L A L A L
A L A L A L
a
A L A L A L
m X X m Y Y m Z Z
x x f
m X X m Y Y m Z Z
m X X m Y Y m Z Z
y y f
m X X m Y Y m Z Z
(2-1-1)
其中:f 為像主距; x0、y0表像主點坐標; xa、ya表像點a 的影像坐標;
XA、YA、ZA表地物點A 的物空間坐標;
XL、YL、ZL表投影中心L 的物空間坐標;
mij:由像機投影中心分別對物空間坐標系的 X、Y、Z 軸旋轉姿態角 ω、φ、κ 所構成旋轉矩陣之組成元素。
光束法平差是以一張像片組成的一束光線作為平差的基本單元,以中心投影的共 線 式 作 為 平 差 的 基 礎 方 程 。 即 將 區 域 內 所 有 像 片 之 位 置(XL、YL、ZL)及 方 位
)
( 、 、
同時進行平差計算,以求得各點所有共軛光束之最佳交點,並令其符合 已知之地面控制點。為採最小自乘法平差,須先線性化共線方程式:
f
v (2-1-2) 式(2-1-2)中,六個未知的影像外方位參數以 表示,點位的物空間坐標以 表示
v 為殘差,觀測量為影像坐標的量測值。
光束法平差主要包括以下幾個過程:
1、像片外方位元素和地面控制點坐標的確定。
2、以共線式為基礎方程式,將其線性化,逐點法化,建立法方程式。
3、利用邊法化邊消去、循環分塊法約化並求解法方程式。
2-1-2 附加參數的自率光束法平差
承上節,傳統航測是以透視中心、像點與物點共線為基本假設,由於實際成 像過程中光線受到大氣折光差、透鏡畸變差、像主點位移及成像面變形等系統誤 差影響而使像點產生偏移,如式(2-1-3),因此將系統誤差納入空中三角解算之方式 稱為附加參數自率光束法平差或簡稱自率光束法平差(Mikhail et al., 2001)。
11 12 13
31 32 33
21 22 23
31 32 33
( ) ( ) ( )
+ ( ) ( ) ( )
( ) ( ) ( )
+ ( ) ( ) ( )
A L A L A L
a
A L A L A L
A L A L A L
a
A L A L A L
m X X m Y Y m Z Z
x x f
m X X m Y Y m Z Z
m X X m Y Y m Z Z
y y f
m X X m Y Y m Z Z
(2-1-3)
其中, 、 為含像主點位移及透鏡畸變差改正量,如式(2-1-4)。
由於目前UAS 受限於酬載限制,僅能搭載非量測用途之消費型像機,又該類 型像機未受正規之實驗室或校正場率定,因此採取適用之自率模式以有效吸收系 統誤差,以提升空三解算精度亦成為相關領域中眾所研究之課題。目前常用的附 加參數模式,多為「正交多項式」與「模擬物理因素作用的系統誤差模型」兩大 類,又以「模擬物理因素的系統誤差模型」的使用較普遍。其中將系統誤差可概 略分類為輻射畸變差及離心畸變差,另外再考量成像面的不平整、成像面雙軸尺 度的不同或雙軸非正交所造成的誤差(McGlone, 2004)。
而模擬物理因素的系統誤差模型,可依照誤差來源的不同,分為下列四個部分 (McGlone, 2004):
r d u f
r d u f
x x x x x
y y y y y
(2-1-4)式中,下標r 者表示透鏡造成的輻射畸變差;下標 d 表示透鏡造成的離心畸變差;
下標u 為底片或 CCD 不平整(out-of-plane unflatness)所造成的誤差;下標 f 則代表 底片或CCD 的拉伸變形(in-plane image distortion)。然而(2-1-4)式並未包含大氣折 光(atmospheric refraction)的描述參數,但大氣折光的影響,可能在影像上造成拉伸 變形的效果,故多項式、正交多項式等模式描述方式仍見使用。
x
y
各種物理因素造成的系統誤差模型中,最廣為人知者為輻射畸變差及離心畸 變差,最常見的模型為(2-1-5a)、(2-1-5b)式(McGlone, 2004; Remondino and Fraser, 2006):
輻射畸變差
3 5 7
1 2 3
2 2
2 2 2
0 0
( ) ( )
r
r
x r
r K r K r K r x r
y r
r x x y y x y
y r
(2-1-5a)
離心畸變差
2 2
1 2
2 2
1 2
( 2 ) 2 2 ( 2 )
d
d
x P r x P x y
y P x y P r y
(2-1-5b)
式中,Δr 為對稱輻射畸變差函數;r 表示影像上任一點到像主點的距離; Ki為輻 射畸變差函數的係數;Pi則為離心畸變差函數的係數。
針對本研究中使用之不同商業軟體各有設定不同類型自率模式,分項說明如下:
表2-1-1、四套軟體之附加參數自率模型
商業軟體 ORIMA Enso Pix4D APS
自率模式 1.Physical model:
Brown(1976)
1.Ebner(1976) 2.Grün(1978) 3.Physical model
內定 無
2 2 4 4 6 6
0 1 0 2 0 3 0
1 2
2 2 2 2 4 4
1 2 3
2 2 2 2 2
1 2 3 4 5
( ) ( ) ( )
( ( - ) ( - )) /
x x a r r x a r r x a r r x b x b y
c x y c x y c x y x f d xy d y d x y d xy d x y
2 2 4 4 6 6
0 1 0 2 0 3 0
2 2 2 2 4 4
1 2 3
2 2 2 2 2
6 7 8 9 10
( ) ( ) ( )
( ( - ) ( - )) /
y y a r r y a r r y a r r y c x y c x y c x y y f d xy d x d x y d xy d x y
3 2 5 4 7 6
1
(
0)
2(
0)
3(
0)
dr
a r
r r
a r
r r
a r
r r(2-1-6)
其中,r
x2
y2,dr 為透鏡輻射畸變差;a a a 為輻射畸變差的係數;1, ,2 3 b b 為1, 2 近似與非正交的係數;c c c 為像平面不平整的係數;1, ,2 3 d1 ~d 為底片拉伸變形或10 CCD 扭曲的係數。(二) Ebner(1976)自率模式
Ebner(1976)為 EnsoMOSAIC 中採用之自率模式之一,屬於四階正交模式。此 模式之特性則是針對複雜的變形行為較無法發揮效用,相較之下適用於穩定的航 拍系統,如大像幅航拍像片,或經過率定之消費型像機拍攝之像片。
2 2
2 2
1 2 3 4 5
2 2 2 2
2 2 2 2
7 9 11
4 2
2 +...
3 3
2 2 2 2
3 3 3 3
b b
x a x a y a x a xy a y
b b b b
a x y a y x a x y
2 2
2 2
1 2 3 4 6
2 2 2 2
2 2 2 2
8 10 12
4 2
2 +...
3 3
2 2 2 2
3 3 3 3
b b
y a y a x a xy a y a x
b b b b
a y x a x y a x y
(2-1-7)
其中,b 為像空間之基線長度;a ~1 a 則為附加參數。 12
(三) Grün(1978)自率模式
Grün(1978) 為 EnsoMOSAIC 中採用之自率模式之一,為基於 Ebner 模式所衍 生之八階正交模式,並包含44 個參數。由於此模式為高階正交模式因此可應用於 複雜變形行為,但相對而言恐因過度參數化及參數相關導致解算過程不穩定。如 同 Ebner(1976)相對適用非常穩定的航拍區塊,如高重疊、連結強度高且地面控制 點密度高之航拍區塊。
,
,
,
, , , , ,
得到
12 21 22 31 22 14 23 32 41 15
24 33 42 51 25 34 43 52 35
44 53 45 54 55
0 10 ...
7
...
x a x a y a xy a l b k a xp a yk a xl a yq a r a xyp a kl a xyq a s a yr a xlp a ykq a xs a lr a xypq a ks a yqr a xps a rs
12 21 22 13 22 14 23 32 41 15
24 33 42 51 25 34 43 52 35
44 53 45 54 55
10 0 ...
7
...
y a y a x a l b k b xy b xp b yk b xl b yq b r b xyp b kl b xyq b s b yr b xlp b ykq b xs b lr b xypq b ks b yqr b xps b rs
(2-1-8)
5
,
T 5x f x y y A x
y g5
x y,
y B xT 511 15
5
51 55
a a
A
a a
11 15
5
51 55
b b
B
b b
1 2 3 4
xT
x x x x yT 1
y y2 y3 y4
2 2
2
k x b 2 2 2
l y b 2 17 2
px 20b 2 17 2 q y 20b
2 2
31
29
428 70
r
x
x
b
b2 2
31
29
428 70
s
y
y
b
b2 4 6 2 2
0 x 1 2 3 1( 2 ) 2 2 1 2
x x f xr K xr K xr K P r x P x y b x b y
f
2 4 6 2 2
0 y 1 2 3 2 1 2( 2 )
y y f yr K yr K yr K P x y P r y
f
(2-1-9)
其中, f 表示像主距的修正量
2-2 電腦視覺解算模式
圖2-2-1、核線幾何關係圖[D. Forsyth and J. Ponce, 2003.]
在電腦視覺領域中,主要以核線幾何建立立體像對之間的關係,如圖2-2-1 所 示,在三維空間中,物點P 同時投影於左、右像片上,P 點坐標可使用以左像投影 中心Ol為原點的向量Pl,與以右像投影中心Or 為原點的向量 Pr 表示,並且 P 與 兩個像機投影中心Ol、Or形成光軸,其中Ol與Or的連線形成基線(Baseline),由 P、O、l Or三點形成核面(Epipolar plane),核面與像平面相交於核線(Epipolar line),
基線則與像平面相交於核極(Epipole)。為了恢復正確的核線幾何關係,衍生出必 要矩陣(essential matrix)、基礎矩陣(fundamental matrix)、八點法的求解模式,並透 過Structure from motion 的技術進行場景的重建,以下簡單說明:
(一) 必要矩陣(essential matrix)
將兩個像機投影中心Ol、Or的平移量以T 表示,兩像機坐標系的相對旋轉由 旋轉姿態角ω、φ、κ 所構成旋轉矩陣 R,如式(2-2-1),而向量 Pl與Pr 具有關係式 如式(2-2-2)。
r l
T O O 、 R
R R R (2-2-1) ( )r l
P R PT (2-2-2)
又基於P P T、 、 皆位於核面上,向量l r Pl 也會位於同一平面,而T T 為核面之法Pl 向量,依向量內積定理得到式(2-2-3) 。其中T 為核面之法向量,展開後可整理Pl 如式(2-2-4)。
(PlT) ( T Pl) 0 (2-2-3)
0
0 0
x y z z ly y lz z y lx
lx ly lz z lx x lz z x ly l
y lx x ly y x lz
T T T T P T P T T P
T P P P P T P T P T T P AP
i j k T P T P T T P
(2-2-4)
將式(2-2-2)與式(2-2-4)代入式(2-2-3)中,可得關係式如式(2-2-5),經整理後可產生 必要矩陣 E 如式(2-2-6)。透過必要矩陣可以描述左、右影像間的關係,其中R的 幾何意義為旋轉,A 的幾何意義為平移。
(
R P1 r)
TAPl 0
(2-2-5a)0
T
r l
P RAP
(2-2-5b)0
T
透過像機的內方位參數組成的轉換矩陣 Mi如式(2-2-7)所示,得以建立像機坐 標系與影像坐標系的轉換關係,其中f 為像機焦距,Ox、Oy為像主點的影像坐標,
若 P 點於影像上像點的像機坐標向量為p 、l p ,其影像坐標r p 、l p ,兩坐標間r 關係式如式(2-2-8),並整理如式(2-2-9)。
0 0
0 0 1
x
i y
f o
M f o
(2-2-7)
il l l
M p p ,M pir r pr (2-2-8)
1
l il l
p
M p ,pr
Mil1pr (2-2-9)由於物點在像機坐標系的坐標向量與像點的坐標向量成比例關係,故將式 (2-2-5c)按像點坐標向量重新改寫如式(2-2-10),再將式(2-2-9)代入整理,由式 (2-2-11c)可簡單描述出兩張像片上共軛像點的關係,其中式(2-2-12)之 F 成為基礎 矩陣,是核線幾何的代數表示法。任一像點均會滿足式(2-2-11c),故取得一像點坐 標時,其共軛像點必約制於共軛核線上。故內方位參數未知的情況下,可以透過 基礎矩陣 F 來描述兩張影像之間的關聯,當有透視投影矩陣的情況下,也就是內 外方位已知時,可以將Fundamental Matrix 直接計算出來。(Luong & Faugeras, 2004)
0
T
r l
p Ep
(2-2-10)
Mir1pr
T E Mil1pl
0 (2-2-11a)1
0
T T
r ir il l
p M EM p
(2-2-11b)0
T
r l
p Fp
(2-2-11c)1 T
ir il
F
M EM (2-2-12)基礎矩陣具有以下特性:
(1) Transpose:假設 F 是(P , )r P 的基礎矩陣,則l F 會是T (P , )r P 的基礎矩陣。 l
(2) 核線(Epipolar lines)特性:ll
Fxr&
ll
F xT r。(3) 核極(Epipoles)特性:因為核極(Epipoles)落在所有的核線(Epipolar lines)上,
所以e FxTr l
0
x => e FTr 0
同理 Fel 0 (4) F 有七個自由度。(F 是 homogeneous,且 rank= 2)(5) F 提供了一種相關性描述,可由一個點映射成一條線,lr Fxl。 基礎矩陣的用途:
(1) 簡化了匹配的計算:因為x FxTr l
0
,當我們知道F 和x ,只需進行一維的線性l 搜尋。(2) 匹配的誤差偵錯:將影像匹配點代入x FxrT l
0
,由等式的成立與否即可判斷是 否正確。(三) 八點法
在求解基礎矩陣的眾多方法中,以八點法為目前最常用的方法,透過觀測像 對中的八組的共軛像點坐標,以線性方式進行求解。
令x( , ,1)u v T,x' ( ', ',1) u v T,
11 12 13
21 22 23
f f f
F f f f
,按xFx' 0 (2-2-13)
11 12 13
1 1 1 1 1 1 1 1 1 1 1 1
21
2 2 2 2 2 2 2 2 2 2 2 2
22 23 31 32 33
' ' ' ' ' ' 1
' ' ' ' ' ' 1
0
' ' ' ' ' ' 1
n n n n n n n n n n n n
f f u u v u u u v v v v u v f
u u v u u u v v v v u v f
Af f
u u v u u u v v v v u v f
f f f
(2-2-15)由於觀測誤差及雜訊的關係,可能導致求出的F 的秩大於 2,故以一個秩為 2,
且 FF' 為最小的F
'
代替,而對F 作 SVD 分解。令 F U
VT 、 F'U
'VT (2-2-16)其中
1 2
3
0 0
0 0
0 0
、 ' 01 02 000 0 0
(2-2-17)八點法的優點是其為線性求解,容易解算且快速。但因 A 各列的數值大小差 異過大,故容易受到觀測誤差及雜訊的影響。一般可以正規化(normalize)方式進行 改善,其程序如下:
(1) 透過轉換參數T T
, '
,將x x, '
正規化至[-1,1]之間 xTx ,x'T x' ' (2-2-18) (2) 以 x 、 x ’當作輸入值,重新帶入式(2-2-15),求解得 F。
(3) 最後再轉換求得 F T'T FT
。
(四) Structure from motion
Structure from Motion(簡稱 SfM)是一種透過物體移動量、像機運動及物體 在三維空間中運動的物理關係重建三維物件或空間場景的方法。得以兩張或多張 影像進行重建,達到一種自我校正的技術。
藉由SfM 技術的發展,讓攝影測量不再侷限於傳統的量測型像機,即使是一 般的消費型數位像機也可以快速、自動化和低成本的方式獲得的三維資訊。類似 傳統攝影測量,SfM 攝影測量需採用具不同視角的重疊率影像來進行求解;不同 的是,SfM 攝影測量並不需要事先取得像機的內、外方位參數的初始值、以及地 面控制點資料,而僅需透過場景內完整且高重疊率的攝影影像,透過其關鍵技術 包裝而成的工具,不需過多的專業知識與操作設定即可產製大量的三維資料,重 建三維場景。而在整個SfM 的作業程序中,主要核心問題為像機的率定、高密度 的立體匹配、以及光束法平差。其計算程序可概略劃分如圖2-2-2,並分述如下:
圖2-2-2、SfM 計算程序流程圖
(1) 影像特徵點萃取:從影像中萃取影像特徵點以供後續匹配之用,最常用的特 徵點萃取方法為SIFT 演算法。匹配過程採用了如 KD-TREE 的方法對最近鄰 的特徵點進行匹配,在兩視角的幾何中,對應點應該滿足式 pFp'=0,其中 F
兩兩影像之間的HOMEGRAPHY 得到內點後,選取內點數最少又不少於 100 個的影像對作為原始輸入,再採用 5 點法或 8 點法求出兩張影像的相對方位 參數以及像機參數。
(3) 最佳化計算:利用上述得到的像機參數以及兩張影像的匹配關係求出匹配點空 間三維坐標,以作為光束法平差(Bundle-adjustment)的初始值,而後進行光束 法平差計算,之後將該影像上其他經重建過影像上也有的特徵點添加到重建 過程中進行重建,即將重建工作由二張影像開始進行,反覆擴展至全區多張 影像。重建作業結束後進行一個全區的Bundle-adjustment,進行整體方位的解 算。
(4) 全區套合:將全區平差成果按控制點資訊進行全區套合,將成果化算至控制點 的基準系統。
2-3 傳統航測與電腦視覺解算模式之比較
傳統航測主要訴求為製圖,故對於硬體的需求較為嚴謹,像機之內方位參數 多為穩固且經實驗室嚴謹率定。其解算模式中,主要基於共線式的光束法整體平 差,將每張像片視為一個獨立單元,精確求解出每張像片投影中心的外方位參數,
進而再以此前方交會解算出興趣點的地面坐標。其中像機的內方位參數為必要輸 入資訊,投影中心也必需提供一個良好的初始值供後續迭代求解,另需輔以地面 控制點資訊,做為求解投影中心外方位參數的必要資訊。其對於影像連結點的需 求以每張片子9 個標準點位(von Gruber 點位)上至少需有一點,該點需與所有相鄰 片連結(如圖 2-3-1),但若以附加參數的自率光束法求解像機參數,則需大量的連 結點來解算。其在連結點的影像匹配上,以匹配區位為主要考量,僅需於重要區 位上量測共軛像點,即可藉此建立影像間的連結關係。另外,可依據影像量測值、
控制點成果、像機參數等資料給予一適當的觀測精度,作為平差計算中的先驗精 度並據以適當的加權調變(Hartley,1993)。
圖2-3-1、傳統航測連結點分布示意
電腦視覺解算模式中,先於二維影像中進行特徵點萃取,透過基礎矩陣中核 線幾何的點位約制,輔以RANSAC 除錯機制,反覆迭代求得最佳解,並由二張影 像開始進行,反覆擴展至多張影像,最後完成全區影像的方位解算。其解算過程 中,大量的匹配點成為其解算的必要條件,故一般會需要較長的計算時間,但因 計算方式多以模組化的工具進行包裝,不需由使用者給定相關參數,故操作上多 較為簡易便利,且若以SfM 法進行求解,甚至不需要事先取得像機的內、外方位 參數以及地面控制點資料,而僅需透過場景內完整且高重疊率的拍攝影像即可求 解,進而進行多視角影像的密點雲匹配,作為三維建模的重要參考資訊來源。
兩者相較可以看出,主要差異性整理如下表:
表2-3-1、傳統航測與電腦視覺解算模式之比較
比較項目 傳統航測(光束法平差) 電腦視覺(SfM) 影像重疊率 一般航測僅需前後 60%、側向 30%
UAS 影像則需適度增加重疊率。
場 景 內 完整且 高 重 疊率的 拍 攝影 像,目前基於電腦視覺演算法的商 業軟體要求至少需前後 80%、側向 60%。
輸入資料 1.航拍影像。
2.像機參數為必要,經率定者為佳。
3.影像外方位需給予良好初始值。
4.控制點資訊為必須。
僅需提供品質良好的清晰影像,餘 參數資訊均可不需要。
連結點數量 僅需於標準點位有點即可;若進行 自率光束法平差,則需增加連結點 數量。
需非常大量的匹配點來提供求解像 機參數及場景重建所需。
連結點匹配 模式
1.多基於影像灰度上的特徵匹配,匹 配點具有視覺上的特徵意義。兩 張影像間若存有尺度及旋轉問題 則無法進行。
2.可按空三量測網形提供可靠度相 關指標進行檢核,或依解算之外 方位前交匹配點,再以高程值濾 除大錯。
1.多以 SIFT 演算法進行特徵萃取,
匹配點多不具視覺上的意義,但 可有效對抗影像尺度及旋轉上的 差異。
2.以核線幾何進行匹配點的約制及 檢核,未提供精度指標。
人工介入處 理
提供空三網形資訊,得輔以人工量 測補強網形。
計算方式以模組化的工具進行,多 不提供網形資訊。
平差模式 將每張影像視為一個獨立單元,進 行一次性的整體平差,主要求解標 的為外方位參數,再據以進行興趣 點的前交得到地面坐標。
以兩張影像為最小單元(模型),求解 其基礎矩陣 F 建立相對關係,並求 解像機參數及匹配點三維資訊進行 場景重建,再逐步加入其他影像擴 展至全區模型的場景重建,最後才 與控制點進行套合(類似航測上的 獨立模型空三法)。
比較項目 傳統航測(光束法平差) 電腦視覺(SfM) 控制點套合
情形
可依據不同控制點精度進行套合,
與控制點套合度佳,控制點的改正 數均甚小。
與控制點套合度較差,控制點的改 正 數 明 顯 較 大 , 部 分 商 業 軟 體 (如:Pix4D)先以內部檢核機制,濾除 其認為不適合的控制點。
後端輸出與 應用
高精度的外方位參數,主要提供後 續立體測圖之用,亦可進行DEM 自 動萃取,產製正射影像。
正射影像、DEM/DSM、等高線、密 點雲模型(可供三維建模之用)。
第三章 實驗配置與使用軟體
本研究規劃以四套商業軟體搭配 8 種不同的控制點密度配置進行同一個實驗 區UAS 影像的空三求解,藉以評估在此四套軟體中各自的最佳控制配置方案。之 所以選定這四套軟體,乃基於實際作業上資源取得的便利性,並希望能藉此比較 基於傳統攝影測量與電腦視覺之不同解算模式下的成果差異,作為後續實務工作 上的作業規劃參考。
3-1 使用軟體(EnsoMOSAIC、ORIMA、Pix4D、APS)簡介與比較
3-1-1 軟體簡介
(一) EnsoMOSAIC 簡介
(參考自:http://www.mosaicmill.com/products/software/ensomosaic.html)
EnsoMOSAIC 是一套攝影測量軟體,不同於一般影像拼接程式僅針對影像內 容進行連續性的拼接而常產生扭曲及尺度上的變形,該軟體特別強調適用於 UAS 影像的處理,其經空三平差計算程序後,得自動匹配萃取DEM 成果,將原始航拍 影像進行高差位移糾正程序並經影像色彩平衡和圖像增顯等處理而鑲嵌成正射影 像,藉以應用於向量圖資數化,其DEM 成果更可提供體積資訊需求的應用(如:
土方量計算等相關應用)。
EnsoMOSAIC 的主要產品訴求為產製多航帶多影像的鑲嵌正射影像,其在影 像重疊率的建議上,以航帶內的前後重疊率應達 65%以上、航帶間的側向重疊率 應達35%以上,並建議於航拍過程中應盡可能取得高精度的 GPS 資訊,將有助於 正射精度的提升,而未必需依傳統航測的高密度方式佈設控制點,甚至可以不需 要地面控制點。本次實驗引用該軟體的版次為EnsoMOSAIC Version 7.5,其主要操 作介面如圖3-1-1。
圖3-1-1、EnsoMOSAIC 7.5 主要操作介面
(二) ORIMA 簡介
(參考自:http://orima.software.informer.com/)
ORIMA 是基於 Leica Geosystems 之 Leica Photogrammetry Suite (簡稱 LPS)
中所附加提供的空三平差模組,其主要訴求為提供專業攝影測量上的空三平差計 算功能。其高精度且嚴謹的數學模式,提供了像機參數(如圖 3-1-2)、GPS 參數 和慣性測量單元(IMU)姿態參數之求解,模式雖嚴謹但仍保有作業彈性。其具 備了全自動的連結點匹配(APM)與便利的連結點/控制點之像坐標量測介面(可 同時自動開啟多張影像供精確量測像點),並提供強大的視覺分析與自動除錯等工 具,且能即時更新空三觀測網形供使用者確認,讓專業的攝影測量空三計算在達 到精度同時也簡化操作流程。本次實驗引用該軟體的版次為ORIMA Release 9.20,
其主要操作介面如圖3-1-2。
(a) ORIMA 之視覺化分析工具
(b) ORIMA 之空三計算介面
(三) Pix4D 簡介
(參考自:https://pix4d.com/)
Pix4D 主要產品訴求為以高精度又有效率的方式針對大量的(數千張等級)影 像進行處理解算,進而產製二維的鑲嵌正射影像與三維模型,提供了後續測繪及 三維建模所需的完整資訊。其解算模式基於電腦視覺與傳統攝影測量的結合,並 採用全自動的作業流程(少有作業參數供使用者輸入調變),其優異的成果精度,
甚至實現了以UAS 影像產製出與傳統航測大像幅影像同等級精度的成果,並可將 其終端產品(密點雲、三維模型等)成果輸出匯入至特定的GIS 和 CAD 軟體,以 供後續應用。本次實驗引用該軟體的版次為Pix4Dmapper Version 1.1,其主要操作 介面如圖3-1-3。
(a)
Pix4D之主要作業環境
(b) Pix4D 之像點量測介面
圖3-1-3、Pix4D 主要操作介面
(四) APS 簡介
(參考自:http://www.menci.com/photogrammetry-software/aps-3d-maps-software)
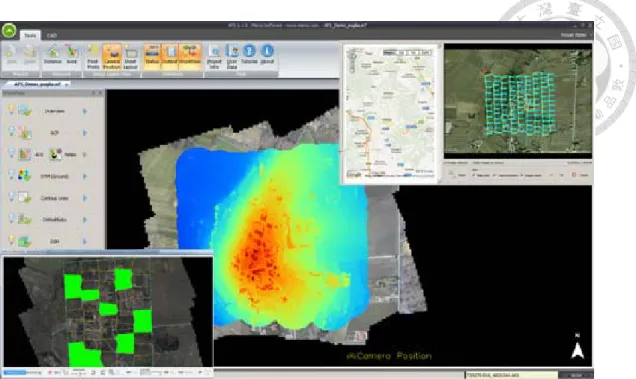
APS(Aerial Photo Survey)主要訴求為專門針對中、小像幅的 UAS 航拍影像 進行計算處理, 是一套功能強大且成果應用廣泛的軟體。其操作介面十分簡易便 利,僅需透過幾個簡易步驟即可全自動完成整個作業流程,並產製出高精度(公 分級)的二維向量圖資與三維模型成果。其對於原始資料的相關要求中,必需包 含航拍軌跡之GPS 資料(IMU 資料非必要),原始航拍影像需以規則的航帶設計
圖3-1-4、APS 主要操作介面
3-1-2 操作程序與輸出成果及報表之比較
綜合比較四套軟體之作業流程與操作方式,可將整體作業流程歸納為以下程序,
如圖3-1-5,並於各程序中說明各軟體的作業特性。
圖3-1-5、目前商用軟體之 UAS 空三解算流程圖
層匹配及解算後,再往下一階層進行同樣程序直至 level_0,此特殊作業方式 與其他三者明顯不同。
(3) 建立影像連結關係:透過影像特徵匹配方式產生連結點,部分軟體提供影像匹 配模式參數設定,其中ORIMA 提供了連結點匹配區位配置,如:5×5、7×7、
9×9;APS 按區域特性提供了五種影像匹配策略(如圖 3-1-6);EnsoMOSAIC 與 Pix4D 則由軟體內定。
圖3-1-6、APS 提供之影像匹配策略選項
(4) 空三網形補強:ORIMA、EnsoMOSAIC 提供了影像匹配之連結點網形評估資 訊,進而得以人工補點方式改善不足之處,且相關網形資訊以圖示方式呈現 並且即時更新,便於評估人工補點之效益;而 Pix4D 僅於最終之空三平差報 表輸出時提供空三網形強弱資訊,如圖3-1-7,可看出其在「初步檢查」與「高 精度處理」程序中明顯不同的空三網形強度(線段顏色深淺代表匹配點數量,
顏色越深點越多);APS 則未見有相關網形評估資訊的提供。
(a) 初步檢查 (b) 高精度處理
圖3-1-7、Pix4D 空三網形評估資訊
(5) 控制點與檢核點之坐標匯入與像點量測:四者均具備該項功能,但以 ORIMA 的量測介面最便於量測(可一次針對所有相關影像提供自動比對及量測),APS 次之,再來 EnsoMOSAIC,而 Pix4D 最難操作,僅提供了影像清單供使用者 自行判斷並選定點位所在影像後,載入單張影像供量測,如圖3-1-3。故本實 驗中控制點與檢核點的量測先於 ORIMA 中進行量測,再透過坐標系統
(EnsoMOSAIC 以 pixel 之影像坐標記錄量測值,ORIMA 與 Pix4D 則以慣用 的像片坐標記錄)與格式轉換方式,將像點觀測值匯入至 EnsoMOSAIC 與 Pix4D 中,也可排除量測上的錯誤發生與量測精度上的差異,惟 APS 的相關 量測資料記錄格式為其特殊封閉格式,僅能以重新量測方式進行。
(6) 平差計算與輸出報表:依據上述航拍軌跡 GPS 資訊、像機參數、連結點/控制 點/檢核點等像點觀測量進行空三平差計算(Bundle Adjustment),並針對相關指
圖3-1-8、ORIMA 提供空三報表輸出選項
表3-1-1、本實驗使用四個軟體所輸出空三報表之資訊比較
輸出資訊內容 ORIMA EnsoMOSAIC Pix4D APS
平
差 前 資 訊
參數檔讀取路徑及成果 輸出路徑,觀測精度等級 的設定
Ⅴ Ⅴ X,未提供觀測
精度設定
X,未提供觀測 精度設定
控制點、連結點、影像、
像機、GPS 等參數之數量 統計
Ⅴ Ⅴ Ⅴ Ⅴ
點位量測情形:(a)各像點 所在影像清單;(b)重點 數的數量統計;(c) GPS 資料數量
Ⅴ X X △*2,僅有(a)
參數、觀測量、多餘觀測 數統計
Ⅴ Ⅴ X Ⅴ
迭代過程中資訊
迭代過程中資訊(每張影 像觀測量/GPS Profile 之 RMS)
Ⅴ X X X
自動偵錯所刪除的觀測 量級其相關精度指標(改 正數、多餘觀測數)
Ⅴ X X X

![圖 2-2-1、核線幾何關係圖[D. Forsyth and J. Ponce, 2003.]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603175.629572/23.892.162.766.131.711/圖221核線幾何關係圖DForsythandJPonce23.webp)