動態彈黏塑性模式於鋪面分析之研究
劉明樓 李端聖
義守大學土木與生態工程學系
林智強
成功大學土木工程學系
摘 要
使用合理的力學模式預測鋪面材料在荷重下之反應是為鋪面研究者努力 之焦點。因鋪面材料具有彈黏塑性之特性,過去已有不少學者使用此模式進行 鋪面材料之模擬,但大都仍以實驗室材料行為之模擬為主。本研究擬將彈黏塑 性動態有限元素程式與最佳化理論結合發展鋪面動態之反算與正算分析程 式,並用於實際鋪面之結構分析。為驗證所發展程式之正確性,本研究將使用 美國聯邦公路總署所建立之 LTPP (Long-Term Pavement Performance) 資料庫 中之資料作為發展模式驗證之基礎。首先選擇六個試驗路段得其相關之資料,
及進行反算分析求得發展模式之參數,並利用此參數進行鋪面結構分析,探討 鋪面在不同車速反覆作用下之位移與應力反應相互間之差異。
關鍵詞:彈黏塑性模式,有限元素法,動態反算分析。
DYNAMIC ANALYSIS OF PAVEMENT BY USING ELASTO-VISCOPLASTIC MODEL
Ming-Lou Liu Duen-Sheng Lee Department of Civil and Ecological Engineering
I-Shou University Kaohsiung, Taiwan 84008, R.O.C.
Chih-Chiang Lin Department of Civil Engineering National Cheng Kung University Tainan, Taiwan 701, R.O.C.
Key Words: elasto-viscoplastic model, finite element method, dynamic backcalculation analysis.
ABSTRACT
It is a major concern of highway research to use rational mechanical models to predict the responses of pavement under loading. It has been shown that pavement material has viscoplastic behavior. The viscoplasticity model has been used to predict the behavior of asphalt concrete material in the laboratory. However only a few studies combined viscoplastic meas-
88 技術學刊 第二十四卷 第二期 民國九十八年
urement with a finite element program for the pavement structural ana- lysis. In this study, the elasto-viscoplastic dynamic finite element is incorporated with an optimization approach for the backcalculation ana- lysis, and the layer moduli and viscoplastic parameters are backcalculated and the results used for structural analysis. The comparison of the displacement and stresses are also studied for different traffic loadings. In order to verify the backcalculation program, the LTPP database developed by FHWA in the United State is used for verification. At first, six test pavement sections were selected from the LTPP database. The informa- tion in the database includes pavement structure information and time-history response data to FWD tests. The field model parameters are obtained from backcalculation and the results used for structural analysis of pavement under repeated traffic loading.
一、前 言
過去鋪面分析模式之選擇大都假設鋪面材料為線性 彈性行為[1],而近年來則使用非線性回彈模式來模擬鋪面 之材料特性[2],但在鋪面之結構分析中仍使用彈性模式進 行分析[3-5]。此外,亦有學者使用彈塑性模式進行鋪面之 分析[6, 7],這些分析模式之改變都是為能更合理的模擬鋪 面材料的反應。但在上述之模式中仍有些鋪面材料特性未 被合理的考慮,此特性為鋪面材料之應力與應變為時間的 函數,而瀝青混凝土則是明顯具此材料特性。為能將鋪面 材料考慮此因素,使用彈黏塑性模式是為一較佳的選擇。
彈黏塑性有限元素分析於 1970 年至 1980 已廣用於壓力槽 之結構分析[8-10],且有很好的結果,稍後鋪面研究者亦提 較複雜的彈黏塑性模式[11-14],但大都將此模式用於實驗 室材料行為的模擬且參數不易取得,亦有學者將此模式與 商用軟體結合進行鋪面之結構分析。但由於模式的複雜性 及商用軟體結合的困難,而較難推廣之,故使得彈黏塑性 模式於工程之應用與發展受到限制。本研究主要目的即在 使用較為熟悉的塑性模式如 Owen 等學者[8, 9]所提的統一 法 (Unified approach) 進行彈黏塑性模式有限元素於鋪面 之靜動態分析,因其理論簡易,故較易於推廣於工程實務 分析。故本研究擬用彈黏塑性模式與動態有限元素法結合 於鋪面之結構分析。
模式之發展需經過驗證始能用於實際之工程分析,故 本研究將使用美國聯邦總署所建立之 LTPP (Long-Term Pavement Performance) 資料庫中之資料作為發展模式驗 證之基礎[15]。美國 LTPP 資料庫為目前世界上規模最大之 鋪面研究資料庫,其包含鋪面結構,材料及相關之室內與 野外試驗 (如 FWD 試驗),故此資料將作為所提模式之發 展與驗證分析之用。本研究將選擇數個試驗路段,得其相 關之資料,先進行反算分析得到發展模式之參數,並驗證 模式之有效性。過去亦有學者用彈黏性模式於動態反算分 析[16, 17],但仍較少應用於鋪面之結構分析。本研究將提 出彈黏塑性模式與動態有限元素法結合發展鋪面彈黏塑性 動態之結構分析,為求得模式參數,亦將所發展的有限元
素程式與最佳方法結合,並進行 LTPP 試驗路段的反算分 析以求得分析鋪面之模式參數。由於過去較少進行動態彈 黏塑性結構分析,並探討在不同反覆車速作用下之反應,
故相信本研究將有助於了解鋪面之彈黏塑性之行為,其結 果對鋪面材料特性之研究將有所幫助。
二、彈黏塑性模式與有限元素程式 1. 彈黏塑性模式
本研究擬提出彈黏塑性模式於鋪面之分析,此彈黏塑 性模式受力後其總應變率ε& 可分為彈性應變率與彈黏塑性 應變率如下所示:
e vp
ε ε ε&= +& & (1)
其中塑性應變率可表示如下:
vp ( ) ε γ φ σ f
σ
= ∂
& ∂ (2)
上 式 中 f 為 降 伏 面 , 而σ 為 有 效 應 力 , 其 表 示 為 3/2(σ σij, ij),是應力不變量。本研究採用 Drucker-Prager 破壞準則,γ 為流動參數其為控制塑性應變率,此破壞模 式可表示為
2 1
( , vp) D
f σ ε = J −αJ − (3) k 上式中 J2D 與 J1 分別為第二軸差應力不變量,第一應力
不變量,而 α 與 k 則為材料參數。εvp為有效塑性應變,
可表示如下:
1
3 2
( )
vp 2 d vpd vp
ε =
∫
ε ε (4)而 εvp 為塑性應變張量,且有效應力增量 dσ 與有效應 變增量 dεvp 之關係如下所示:
dσ=H'dεvp (5)
Stop No
Yes
Yes ti+1 < tf
dn+1 = [M + ⎯ C]Δt −1{(Δt)2[−p(dn) + fn] + 2Mdn − [M − ⎯ C]dn−1} 2
Δt 2 [εεvp]n+1 = [εεvp]n + [εεvp]n Δt
[εεvp]n = 0 d0, εε0vp
Φn(F) > 0
No [εvp]n = γ〈Φn(F)〉 ⎯∂F
∂σn
∂σ∂
ε γ
p(dn) = fΩB[dn]TσσndΩ
圖1 彈黏塑性動態有限元素法之計算流程圖
而 H′ 為硬化參數,其為應力增量與塑性應變之比。為使
分析之問題更為簡化,本研究將塑性模式之參數 α 為 0。
在時間 tn時由位移可求得總應變εn,此總應變可再分解如 下所示:
[ ] [ ]
n e n vp n
ε = ε + ε (6)
其中 [ ]εe n及 [εvp n] 分別為時間 tn時之彈性及塑性應變量,
則時間 tn之應力σ可由彈性應變求得如下所示:
[ ] {[ ] [ ] }
n D e n D n vp n
σ = ε = ε − ε (7)
上式中 D 為應力與應變關係矩陣。此應力代入降伏準則可 判斷材料是否降伏,若降伏之塑性應變率可由公式 (2) 求 得,則時間 tn+1之塑性應變可由 Euler 法則求得如下:
[εvp n]+1=[εvp n] +[ε&vp n]Δt (8) 上式中Δt 為時間增量,Δt 之選擇則受到材料性質、網格劃
分之影響。此公式將用於有限元素之分析。
2. 動態彈黏塑性有限元素
鋪面系統在受車輛動態荷重下之反應可利用有限元 素法進行分析,藉由最小虛功法,離散化後之鋪面系統運 動平衡方程式可表示如下:
T
BNσNd NTρ N d N t dTi 0
Ω Ω + Ω − Γ =
∫ ∫ ∫
(9)上式中 B 是應變位移矩陣,N 為形狀函數,ti為曳引力,
而 ρ 為密度,上式再經化簡,可得下列之系統運動方程
式:
[ ]
M { } { } { }d&& + p = F (10)v = 0.4 v = 0.35 v = 0.35 v = 0.3
E4
30 cm
E1
E2
E3
圖2 反算分析鋪面結構示意圖
其中 [M] 為質量矩陣,{p}為內力向量,其為彈黏塑性應 力與應變關係之函數,而 { }d&& 為節點之加速度向量。上式 中可以使用時間域或頻率域求得其系統在不同時間下之反 應,由於本研究將於時間域進行分析,因此本研究將採用 直接積分法中之中央差分法進行求解,其中加速度 d&& 表示 如下
1 1
2
1 ( 2 )
( ) n n n
d d d d
t + −
= − +
&& Δ (11)
將上式代入運動方程式可得:
1 1
2
(dn 2dn dn ) n n
M p f
t
+ − + −
⎧ ⎫+ =
⎨ ⎬
Δ
⎩ ⎭ (12)
將公式 (12) 整理可得下式:
1 2
1 [ ] {( ) [ ] 2 [ ] 1}
n n n n n
d+ = M − × Δt − +p f + Md − M d− (13) 動態彈黏塑性有限元素法之流程圖如圖 1 所示,在已 知初始之位移 d0與εvp時,可算出任一時間 tn下之位移, 並 利用塑性力學準則判斷是否產生塑性應變,直到分析時間 終止為止,上述之動態有限元素程式以 Owen 及 Hinton[8]
所發展程式進行修改使其可用於分析鋪面的問題,並用此 程式與反算方法結合以進行鋪面之反算分析。
三、鋪面反算模式之發展與驗證 1. 反算方法
動態彈黏塑性動態反算分析的基本原理為如圖 2 之鋪 面系統,當落體測位儀之重錘打於鋪面時,於一側設置數 個感應器並量測其位移歷時反應 wijm,其中下標 i 與 j 分別 表示位置與時間,而上標 m 為量測值,而 p 為預測值。首 先假設鋪面之初始彈黏塑性材料性質,並計算於各感應器 位置之位移歷時反應w ,再使用下列公式計算誤差: ijp
90 技術學刊 第二十四卷 第二期 民國九十八年
表一 驗證鋪面之結構與材料參數
試驗道路 AC 層 底層 路基 1 厚度 (cm) 22 42 ∞
楊氏模數 (MPa) 3000 200 100 流動參數(kPa) 0.2 0 0 2 厚度 (cm) 22 58 ∞
楊氏模數 (MPa) 1000 100 200 流動參數(kPa) 0.08 0 0 3 厚度 (cm) 30 16 ∞
楊氏模數 (MPa) 2000 600 300 流動參數(kPa) 0.4 0 0
(Ei, γ1, i = 1, 2, 3...)
圖3 動態反算分析流程圖
2 1 1
[ ( , ) ( , )]
n k
m p
r ij ij
i j
E w x t w x t
=∑ ∑= = − (14)
上式中w 為感應器 i 處 j 時之觀測位移,ijm w 為感應ijp 器 i 處 j 時之預測位移。本研究所使用之量測感應器數 n 為 8 個而每個感應器處取時間數 k 為 7 個。使用公式 (14) 計算得預測位移誤差後,本研究將使用圖形尋覓之最佳化 方法修正材料參數,並由疊代過程求得誤差為最小之材料 參數。圖形尋覓法之基本原理為先定一目的函數 W,其等 於公式 (14) 之誤差,並藉由最佳化的方式改變初始材料 參數直至誤差最小時之目的函數如下所示:
W = Min(Er) (15)
當誤差為最小時,所用之參數即為最佳的材料性質。
圖形尋覓之原理可見參考文獻[18, 19],而所改變之材料參 數包含各層之楊氏模數與第一層之彈黏塑性參數。動態反 算程式之發展是將最佳化理論與動態有限元素程式結合,
其反算分析流程如圖 3 所示。首先假設各層之彈黏塑性模 式參數及誤差準則,其中下標表示其為第 i 層鋪面之材料 參數。使用上述最佳化理論進行疊代計算與改變材料性質 直至誤差小於所定之誤差準則,或最小誤差為止,本研究 是以最小之誤差做為疊代停止之準則。
2. 反算程式與驗證
本研究主要是將 Owen 及 Hinton 所發展的彈黏塑性 有限元素進行修改以進行鋪面之反算與正算分析,首先假 設三種不同鋪面結構及材料參數,其假設之鋪面結構、柏
表二 驗證鋪面材料參數之反算結果 楊氏模數 (MPa) 流動參數 (kPa) 試驗道路
E1 E2 E3 γ1
正確值 3000 200 100 0.2 假設值 1500 100 50 0.1
結果 3042 196.3 100.15 0.1902 1
誤差 (%) 1.4 1.85 0.15 4.91 正確值 1000 100 200 0.08 假設值 500 50 100 0.04
結果 997.7 100.1 199.8 0.0779 2
誤差 (%) 0.23 0.1 0.1 2.5875 正確值 2000 600 300 0.4 假設值 1000 300 150 0.2
結果 1982.2 625.8 299.01 0.4044 3
誤差 (%) 0.89 4.3 0.33 1.1
-100 0 100 200 300 400 500 600 700 800 900
0 10 20 30 40 50 60
Time (ms)
Load (kPa)
圖4 ID 04-1007試驗路段荷重歷時圖
松比及材料性質亦如表一,而塑性材料參數 k 與 H′ 分別 為 0.3 與 25000 kg/cm2,再使用動態有限元素程式模擬鋪 面受試驗路段 ID 為 04-1007 FWD 重錘荷重作用之歷時如 圖 4 所示,並將所得各感應器位移歷時資料作為反算分析 之依據。將表一中之材料性質作為反算驗證分析參考之正 確值 (True Value)。接著假設三種鋪面皆承受上述試驗路段 之落錘荷重歷時作用,並分別計算在距荷重中心 0 cm、20 cm、30 cm、45 cm、60 cm、92 cm、121 cm 及 152 cm 位 置之位移歷時反應,此結果視為 FWD 試驗時於各感應器 所量得之歷時反應值。
表二為所給定三個假設鋪面進行反算分析之結果,其 中初始假設材料性質為給定正確值的 0.5 倍,動態反算分 析所得最佳參數後並計算與正確值之相對誤差亦如表所 示。由相對誤差之結果說明所得之最佳材料參數與正確值 非常接近,且其最大相對誤差 4.91%發生於假設鋪面 1 之 第一層流動參數,而其它材料參數之相對誤差皆小於此 值。圖 5 為使用假設鋪面 1 之反算參數進行正算後所得於
表三 各試驗路段鋪面結構 厚度 (cm) SHRP ID
AC 層 底層 基層 路基
04-1007 27.432 27.432 0 ∞ 04-1018 23.114 18.288 0 ∞ 04-1025 21.082 12.446 0 ∞ 06-8153 13.462 15.748 45.720 ∞ 12-3995 12.700 32.512 30.480 ∞ 16-1020 9.652 31.242 20.828 ∞
-50 0 50 100 150 200 250 300 350 400 450
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Back-cal value True value Profile 1 Sensor 1
Sensor 2 Sensor 3 Sensor 4
Sensor 5 Sensor 6 Sensor 7 Sensor 8
圖5 假設鋪面1之量測值與預測值之比較
各感應點之歷時反應並與正確值作比較,由圖可知預測值 與正確值之結果非常接近。由上述之反算驗證分析可知所 發展動態反算程式之正確性。假設鋪面 2 與 3 所得預測之 位移反應亦與正確值接近。
四、鋪面之動態分析
本節將使用所發展之彈黏塑性模式與 LTPP 鋪面之動 態分析,首先由 LTPP 資料庫中選出六個試驗路段並得其 鋪面之結構、材料及 FWD 試驗資料,再進行反算分析得 各路段之模式參數,最後再進行各試驗路段在不同車速作 用下之動態反應。以下將詳述各路段之分析方法與結果。
1. LTPP資料庫
美國公路研究單位於 1980 年代中期進行公路策略研 究計劃時 (Strategic Highway Research Program, SHRP) 即 進行現場鋪面材料及績效試驗,並將結果收集於鋪面長期 績效資料庫。FHWA 於 2003 年開始提供網路版之 LTPP 試 驗資料庫,它可方便提供世界各地鋪面研究者取得資料並 加以利用。本研究由 LTPP 資料庫中選取 SHRP 計畫中之 六個試驗路段,並由某落錘作用之歷時資料進行反算分 析。所分析的六個試驗路段之鋪面結構如表三所示,其中 三個鋪面為三層鋪面,而另三個為四層鋪面。此外,動態 分析時瀝青混凝土層、底層、基層及路基之柏松比分別假 設為 0.3、0.35、0.35 及 0.4。由於彈黏塑性分析需給予各
表四 各鋪面反算結果
塑性參數 (MPa) 應變硬化參數 (MPa) SHRP ID
k1 H′1
04-1007 0.03 2500
04-1018 0.008 9000
04-1025 0.03 9000
06-8153 0.05 6000
12-3995 0.01 3000
16-1020 0.01 8000
圖6 有限元素網格圖
層材料塑性參數,但為避免太多材料參數的反算,本研究 對各層鋪面材料之塑性參數做合理的假設,其假設值如表 四所示。鋪面的反應受其彈黏塑性材料參數的影響,對四 層鋪面系統而言,每一層材料有 4 個材料參數 (E1, γ1, k1,
H′ ),故共有 16 個材料參數再加上 3 個鋪面各層厚度,共1
有 19 個參數會影響鋪面之分析,故本文不進行材料敏感度 分析,因本研究主要是進行 LTPP 試驗道路之反應分析。
分析六組鋪面僅假設第一層為彈黏塑性,以下分別敘述六 個試驗路段之反算分析。
2. 動態反算分析
首先進行三層鋪面之反算分析,第一個分析路段之 ID 為 04-1007,其鋪面結構資料如表三所示,其有限元素網 格如圖 6 所示,而荷重之歷時資料如圖 7(a) 所示,其最大 荷重為 763.2 kPa。反算分析所得之最佳材料性質與誤差詳 見表五,再將此反算參數代入正算程式後得各感應器之歷 時反應與試驗值比較如圖 8,由圖可知第二個感應器在最大 值有些差異,且第一個感應器在時間大於 30 ms 之後預測 值與量測值有較大的誤差,而其餘感應器則是在時間大於 40 ms 之後有較大之誤差,但誤差尚可接受。接著探討第 二組試驗路段之反算分析,其 SHRP ID 為 04-1018。此鋪 面結構資料如表三所示,其荷重歷時曲線如圖 7(a) 所示,
92 技術學刊 第二十四卷 第二期 民國九十八年
表五 各鋪面反算結果 楊氏模數
(MPa)
流動參數
(kPa) 誤差函數 SHRP ID
E1 E2 E3 E4 γ1 Er
04-1007 2608 547.1 0 94.22 0.3932 0.12×10-5 04-1018 3657 408.4 0 138 0.0315 0.21×10-5 04-1025 26030 2815 0 251.5 0.1002 0.10×10-6 06-8153 2497 518.7 189.7 75.83 0.893 0.17×10-5 12-3995 3022 634.9 157.6 140.9 0.2497 0.33×10-6 16-1020 6841 262 247 124.4 1.202 0.22×10-5
-100 0 100 200 300 400 500 600 700 800 900
0 10 20 30 40 50 60
Time (ms)
Drop load (kPa)
SHRP ID:04-1007 SHRP ID:04-1018 SHRP ID:06-8153 (a)
-100 0 100 200 300 400 500 600 700 800
0 10 20 30 40 50 60
Time (ms)
Drop load (kPa)
SHRP ID:04-1025 SHRP ID:12-3995 SHRP ID:16-1020 (b)
圖7 各試驗路段之荷重歷時圖
-50 0 50 100 150 200 250 300 350 400
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 04-1007 Sensor 1
Sensor 2 Sensor 3
Sensor 4 Sensor 5
Sensor 8 Sensor 6Sensor 7
圖8 SHRP ID 04-1007 路段預測與量測之位移歷時反 應之比較
-50 0 50 100 150 200 250
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 04-1018 Sensor 1
Sensor 2 Sensor 3 Sensor 4
Sensor 5 Sensor 6 Sensor 8
Sensor 7
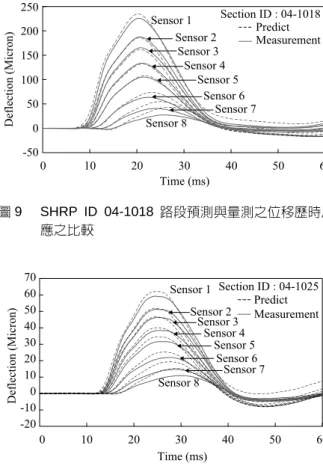
圖9 SHRP ID 04-1018 路段預測與量測之位移歷時反 應之比較
-20 -10 0 10 20 30 40 50 60 70
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 04-1025 Sensor 1
Sensor 2 Sensor 3
Sensor 4 Sensor 5
Sensor 8
Sensor 7 Sensor 6
圖10 SHRP ID 04-1025 路段預測與量測之位移歷時反 應之比較
其最大荷重壓力為 594.8 kPa。此鋪面動態反算分析後之材 料性質與誤差如表五。圖 9 為將此材料參數代入正算程式 後,所得各感應器歷時反應與試驗結果之比較。由圖可知 第五、第六、第七與第八感應器在最大值有較大之誤差,
其餘預測值與觀測值均接近。接著探討第三組試驗路段之 反算分析,其 SHRP ID 為 04-1025。此鋪面結構資料如表 三所示,其荷重歷時曲線如圖 7(b) 所示,其最大荷重壓力 為 393.3 kPa。此鋪面動態反算分析後之材料性質與誤差如 表五。圖 10 為將此材料參數代入正算程式後,所得各感應 器歷時反應與試驗結果之比較。由圖可知除了第一感應器 之最大值與 40 ms 後預測與觀測有差異外,其餘預測值與 觀測值均接近。
接著進行四層鋪面結構之動態反算分析,第一個分析 路段之 ID 為 06-8153,其鋪面結構資料如表三所示,而荷 重之歷時資料如圖 7(a) 所示,其最大荷重為 542.7 kPa。
反算分析所得之最佳材料性質與誤差詳見表五,再將此反 算參數代入正算程式後得各感應器之歷時反應與試驗值比 較如圖 11,由圖可知在 2、3 及 4 感應器其最大位移處預 測值都小於量測值,而在 6、7 及 8 感應器其最大位移處與 測值皆大於量測值,此誤差都可接受。時間在大於 35 ms 以後,預測之永久變形量有些高估,整體行為亦屬合理。
-100 -50 0 50 100 150 200 250 300 350 400
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 06-8153 Sensor 1
Sensor 2 Sensor 3 Sensor 4
Sensor 5
Sensor 8
Sensor 7 Sensor 6
圖11 SHRP ID 06-8153 路段預測與量測之位移歷時反 應之比較
-100 -50 0 50 100 150 200 250 300
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 12-3995 Sensor 1
Sensor 2
Sensor 3 Sensor 4
Sensor 5 Sensor 7 Sensor 6
圖12 SHRP ID 12-3995 路段預測與量測之位移歷時反 應之比較
第二個試驗路段 ID 為 12-3995,其鋪面結構資料如表三所 示,而荷重之歷時資料如圖 7(b) 所示,其最大荷重為 578 kPa。反算分析所得之最佳材料性質與誤差詳見表五,再將 此反算參數代入正算程式後得各感應器之歷時反應與試驗 值比較如圖 12,由圖可知在時間過了 40 ms 之後量測值接 近於水平,而預測值有較大之振動行為,兩者間有些差異。
第三個試驗路段 ID 為 16-1020,其鋪面結構資料如表三所 示,而荷重之歷時資料如圖 7(b) 所示,其最大荷重為 751.3 kPa。反算分析所得之最佳材料性質與誤差詳見表五,再將 此反算參數代入正算程式後得各感應器之歷時反應與試驗 值比較如圖 13,由圖可知各感應器在過了最大位移值之 後,皆與觀測值有些小差異外,其餘時間與觀測值接近。
由以上之分析,可之反算程式可合理的預測 FWD 之反應 並可求得鋪面材料之模式參數。
3. 結構分析
反算分析目的之一為將所得之材料參數做為鋪面強 度之評估,亦即探討鋪面在此材料性質下受車輛荷重所產 生之位移與應力。本研究將反算所得之動態彈黏塑性參數 探討鋪面在受車輛荷重下的反應。所分析之試驗路段如表 三所示,而分析路段之材料參數則如表五所示。此六個試
-100 0 100 200 300 400 500 600
0 10 20 30 40 50 60
Time (ms)
Deflection (Micron)
Predict Measurement Section ID : 16-1020 Sensor 1
Sensor 2 Sensor 3
Sensor 4 Sensor 5 Sensor 7 Sensor 6
圖13 SHRP ID 16-1020 路段預測與量測之位移歷時反 應之比較
0 0
0 0.05 0.1 0.15 0.2
Time (sec)
Load (kPa)
V = 90 km/h
V = 30 km/h V = 50 km/h
-240 480 240 480 720 240 480 240
圖14 不同車速之荷重歷時
驗路段皆承受荷重,其胎壓與荷重半徑分別為 480 kPa 及 10.795 cm。分別考慮鋪面在承受三個不同車速週期荷重下 時反應之比較之位移與應力反應,所用之車速分別為 30 km/h、50 km/h 及 90 km/h,此速度所對應的荷重時間分別 為 0.024 秒、0.015 秒、0.008 秒,亦假設每種荷重作用後 其休息為荷重時間之三倍,此三種車速之荷重歷時曲線如 圖 14 所示。
首先探討六個試驗路段在上述三種不同車速荷重下 之位移反應,圖 15 為三層鋪面在三種不同車速作用下於荷 重中心處垂直位移與時間的關係。由圖可知所有鋪面在荷 重作用時間達到最大的位移,但當荷重消失時,有永久變 形的產生,且車速較慢所產生的最大位移較大。在三層鋪 面中以 ID 為 04-1007 所產生之位移與永久變形量為最大,
且 ID 為 04-1025 為最小。四層鋪面在三種不同車速作用下 於荷重中心處垂直位移與時間關係如圖 16 所示,由圖 15 與圖 16 可知每次荷重作用下最大位移會隨荷重作用次數 增加而增加的情形,故亦將每次荷重作用所得最大位移與 相對的時間關係表示於圖 17 與圖 18,其分別為三層與四 層鋪面所得之結果,由圖可知每次荷重所得之最大位移會 隨時間之增加而變大,於三層鋪面中以 ID 04-1007 增加率 最大,而以 ID 04-1025 增加率最小,而在四層鋪面中以 ID 12-3995 增加率最大,而以 ID 16-1020 增加率最小。
94 技術學刊 第二十四卷 第二期 民國九十八年
V = 30 km/h V = 50 km/h V = 90 km/h ID : 04-1025
ID : 04-1018
ID : 04-1007
0.2 0.15
0.1 Time (sec) 0.05
0 0 0.006 0 0.006 0 0.006 0.012 0 0.006 0 0.006 0 0.006 0.012 0 0.006 0 0.006 0 0.006 0.012
Displacement (cm)
圖15 三層鋪面在不同車速作用下之荷重中心處位移歷 時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 16-1020
ID : 12-3995
ID : 06-8153
0.2 0.15
0.1 Time (sec) 0.05
0 0 0.01 0 0.01 0 0.01 0.02 0.03 0 0.01 0 0.01 0 0.01 0.02 0.03 0 0.01 0 0.01 0 0.01 0.02 0.03
Displacement (cm)
圖 16 四層鋪面在不同車速作用下之荷重中心處位移歷 時圖
V = 30 km/h V = 50 km/h V = 90 km/h
ID : 04-1025
ID : 04-1018
ID : 04-1007
0.2 0.15
0.1 Time (sec) 0.05
0 0.002 0.006 0.01 0.02 0.006 0.01 0.02 0.006
Deflection (cm)
圖17 三層鋪面在不同車速下之位移最大值歷時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 16-1020
ID : 12-3995
ID : 06-8153
0.2 0.15
0.1 Time (sec) 0.05
0 0.01 0.013 0.016 0.019 0.022 0.01 0.013 0.016 0.019 0.01 0.013 0.016 0.019
Deflection (cm)
圖18 四層鋪面在不同車速下之位移最大值歷時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 04-1025
ID : 04-1018
ID : 04-1007
0.2 0.15
0.1 Time (sec) 0.05
0 0 0
400 0 400 0 400 800 1200 0
400 0 400 0 400 800 1200 1600
400 0 400 0 400 800 1200
Vertical stress (kPa)
圖19 三層鋪面在不同車速下之垂直應力歷時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 16-1020
ID : 12-3995
ID : 06-8153
0.2 0.15
0.1 Time (sec) 0.05
0 0 0
400 0 400 0 400 800 1200 0
400 0 400 0 400 800 1200 1600
400 400 0 400 0 800 1200
Vertical stress (kPa)
圖20 四層鋪面在不同車速下之垂直應力歷時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 04-1025
ID : 04-1018
ID : 04-1007
0.2 0.15
0.1 Time (sec) 0.05
0 -200
0 -200 0 -200 0 200 -200 0 -200 0 -200 0 200 -200 0 -200 0 -200 0 200 400
Horizontal stress (kPa)
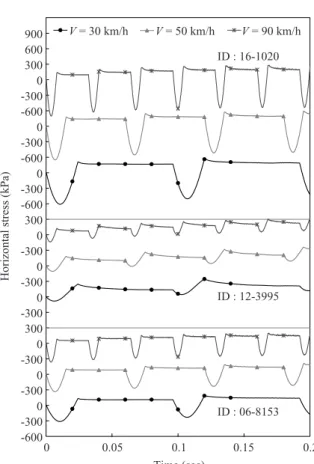
圖21 三層鋪面在不同車速下之徑向應力歷時圖
V = 30 km/h V = 50 km/h V = 90 km/h ID : 16-1020
ID : 12-3995
ID : 06-8153 0.2 0.15
0.1 Time (sec) 0.05
-6000 -300 0 -300 0 -300 0 300 -600 -300 0 -600 -300 0 0 300 600 900
-600 -300
-300 0 -300 0 -300 0 300
Horizontal stress (kPa)
圖22 四層鋪面在不同車速下之徑向應力歷時圖
96 技術學刊 第二十四卷 第二期 民國九十八年
接著探討六個試驗路段在三種不同車速作用下之垂 直應力與徑向應力之反應,六個鋪面在荷重中心下其垂直 應力與時間的關係如圖 19 與圖 20 所示,由圖可知在三層 鋪面中各組所產生之垂直應力最大之均約為 510 kPa 至 560 kPa,且車速較慢所產生的最大垂直應力較大,而在四 層鋪面中,其結果亦如同三層鋪面,由圖亦可知當荷重作 用結束後會產生殘餘垂直應力,此殘餘垂直應力在三層鋪 面中以 ID 為 04-1007 最大,而以 ID 為 04-1025 最小,而 在四層鋪面中以 ID 為 12-3995 所產生之殘餘垂直應力最 大,而以 ID 為 16-1020 所產生之垂直殘餘應力為最小。圖 21 與圖 22 為六個鋪面在荷重中心下於瀝青混凝土底部其 徑向應力與時間的關係,由圖可知在車輛荷重下於瀝青混 凝土底部將產生張應力,且會有反覆張應力的發生,此反 覆張應力為鋪面瀝青混凝土產生疲勞龜裂的重要原因由圖 可知,在三層鋪面中以 ID 04-1018 為所產生之徑向應力為 最大,而以 ID 04-1007 所產生之徑向應力為最小。在四層 鋪面之徑向應力分析中則以 ID 16-1020 產生最大徑向應 力,而 ID 12-3995 產生最小徑向應力,此外三層與四層之 徑向應力分析中,三層鋪面所產生之最大徑向應力約為 200 kPa,但在四層鋪面中 ID 16-1020 與 ID 06-8153 其最大 徑向應力分別到達約為 600 kPa 與 300 kPa,其原因為在四 層鋪面中此兩路段之瀝青混凝土層厚度分別為 9.652 公分 與 13.462 公分,因其較薄故亦將產生較大的徑向應力。
五、結 論
本研究由美國公路總署所管理之鋪面長期績效資料 庫中取六個試驗路段之 FWD 試驗資料,並進行反算分析,
再將所得結果預測試驗路段受其它落錘荷重下之反應,及 探討動態彈黏塑性反算分析所得結果對結構分析之影響。
本研究之重要結論如下:
1. 本研究所發展的動態彈黏塑性有限元素程式,在模擬桿 件在動態荷重作用下之反應分析,當材料為彈性時所得 的有限元素法解與解析解接近。當σy變為零時,亦可合 理的模擬 Maxwell 模式的反應,但在時間開始時動態會 有一些波動行為。
2. 反算程式之驗證是由三種已知不同結構及材料性質鋪 面所產生動態歷時資料進行反算分析,其結果說明反算 程式皆能合理的反算出最佳材料性質且與原始給定之 材料性質接近,且反算所得參數之最大誤差為 4.91%。
3. 在 LTPP 試驗路段的反算分析中,本研究共分析了六組 鋪面,其中所得的反算參數皆可合理的模擬 FWD 試驗 之結果,由此亦可說明本研究所發展之程式的正確性,
此反算參數可做為鋪面結構分析之用。
4. 在三層位移分析中本研究使用反算所得三組的材料參 數,作為結構分析之輸入資料,並探討此三組鋪面在不 同車速作用下的位移反應,結果說明大部分的鋪面在荷 重結束後都有永久變形的發生且此永久變形亦會累積
增加,其中有 ID 04-1007 增加最快而 ID 04-1025 最慢,
且車速較慢時其位移較大,而車速快則位移較小。
5. 在四層位移分析中亦使用反算所得三組的材料參數,作 為結構分析之輸入資料,且此三組鋪面在不同車速作用 下的位移反應,當鋪面在荷重結束後亦有永久變形的發 生且此永久變形亦會累積增加,其中有 ID 12-3995 增加 最快而 ID 16-1020 最慢,且車速較慢時其位移較大,而 車速快則位移較小。
6. 由垂直應力反應可知,最大垂直應力發生在承受車速荷 重作用下,且當荷重移除時會有殘餘應力的產生,其殘 餘應力會隨車速荷重作用次數增加而增加。
7. 所分析之鋪面在三種不同車速作用下於瀝青混凝土底部 會產生反覆的徑向張應力,此反覆徑向應力將造成瀝青 混凝土的疲勞龜裂,且鋪面 ID 06-8153 與 ID 16-1020,
因其厚度較小,故有較大的徑向張應力。
符號索引
B 應變位移矩陣 [C] 阻尼矩陣 D 應力與應變矩陣 J1 第一應力不變量 J2D 第二軸差應力不變量 [M] 質量矩陣
N 形狀函數 {p} 內力向量
ti 曳引力
m
wij 感應器 i 處於不同時間 j 之觀測位移
p
wij 感應器 i 處於不同時間 j 時之預測位移 ε& 總應變率
ε& e 彈性應變率 ε& vp 彈黏塑性應變率 γ 彈黏塑性材料參數
ρ 密度
參考文獻
1. AI, “Thickness Design Asphalt Pavements for Highways and Streets,” Manual Series No. 1, Asphalt Institute, (1991).
2. Uzan, J., “Resilient Characterization of Pavement Ma- terials,” International Journal for Numerical and Analytical Methods in Geomechanics, Vol. 16, pp. 453-459 (1992).
3. Roesset, J. M., Chang, D. W., Stokoe II, K. H., and Aouad, M., “Modulus and Thickness of the Pavement Surface Layer from SASW Tests,” Transportation Research Record 1260, pp. 63-38 (1990).
4. Ong, C. L., Newcomb, D. E., and Siddharthan, R., “Com- parison of Dynamic and Static Backcalculation Moduli for
Three-Layer Pavements,” Transportation Research Record 1293, pp. 86-92 (1991).
5. Chang, D. W., Kang, Y. V., Roesset, J. M., and Stokoe II, K. H., “Effect of Depth to Bedrock on Deflection Basins Obtained with Dynaflect and Falling Weight Deflectometer Tests,” Transportation Research Record 1355, pp. 8-16 (1992).
6. Ramsamooj, D. V., Ramadan, J., and Lin, G. S., “Model Prediction of Rutting in Asphalt Concrete,” Journal of Transportation Engineering, Vol. 124, No. 5, pp. 448-456 (1998).
7. 劉明樓,莊怡芳和廖小媛,「動態時間域反算於柔性鋪 面之分析與應用」,第二屆垚淼土木暨營建發展研討會 CD-ROM,花蓮 (2006)。
8. Owen, D. R. J. and Hinton, E., “Finite Elements in Plasticity: Theory and Practice,” Pineridge Press, Swansea, South Wales, UK. (1980).
9. Zienkiewicz, O. C. and Cormeau, I. C., “Visco-Plasticity
- Plasticity and Creep in Elastic Solids-A Unified Numerical Solution Approach,” International Journal for Numerical Methods in Engineering, Vol. 8, pp. 821-845 (1974).
10. Zienkiewicz, O. C., Owen, D. R. J., and Cormeau, I. C.,
“Analysis of Viscoplastical Effects in Pressure Vessels by the Finite Element Method,” Nuclear Engineering and Design, Vol. 28, No. 2, pp. 278-288 (1974).
11. Richard Kim, Y. and Yanqing, Z., “The Time-Temperature Superposition Asphalt Mixtures with Growing Damage and Permanent Deformation in Compression,” Transporta- tion Research Board, TRB, Annual Meeting CD-ROM (2003).
12. Lee, Y. C., “Application of Viscoelastic Theory and Finite Element Analysis to Determine Effective Temperature of Asphalt Concrete Layer in Flexible Pavement,” Transporta- tion Research Board, TRB, Annual Meeting CD-ROM
(2004).
13. Kim, Y. R., David, H., and Dallas, N., “Development of a Computational Model to Predict Damage-Induced Be- havior of Asphalt Mixtures Under Cyclic Loading,”
Transportation Research Board, TRB, Annual Meeting CD-ROM (2005).
14. Blois, K. D., Dore, G., and Pierre, P., “Use of FWD Time History Data for the Analysis of Seasonal Variation in Pavement Response,” Transportation Research Board, TRB, Annual Meeting CD-ROM (2005).
15. Von Quintus, H. L. and Simpson, A. L., Documentation of the Backcalculation of Layer Parameters for LTPP Test Sections, Publication FHWA-RD-01-113. FHWA, U.S. De- partment of Transportation (2002).
16. 黃偉慶和汪立威,「柔性鋪面彈性模數回算個案分 析」,第八屆鋪面工程研討會,中壢,第 623-632 頁 (1995)。
17. 鐘偉逞,「應用衝擊式撓度儀觀測路面結構強度之研 究」,碩士論文,中央大學土木工程研究所,桃園 (2000)。
18. Letto, A. R., “A Computer Program for Function Opti- mization Using Pattern Search and Gradient Summation Techtiques,” Report for Master of Engineering, Texas A&M University, College Station, TX, USA (1968).
19. Hook, R. and Jeeves, T. A., “Direct Search’ Solution of Numerical and Statistical Problems,” Journal of the Association for Computing Machinery, Vol. 8, No. 2, pp.
212-229 (1961).
2008 年 07 月 07 日 收稿 2008 年 07 月 14 日 初審 2008 年 12 月 08 日 複審 2009 年 01 月 25 日 接受