Chapter 2
Second-Order Linear ODEs
Contents
2.1 Homogeneous Linear ODEs of Second Order
2.2 Homogeneous Linear ODEs with Constant Coefficients 2.3 Differential Operators. Optional
2.4 Modeling: Free Oscillations. (Mass-Spring System) 2.5 Euler-Cauchy Equations
2.6 Existence and Uniqueness of Solutions. Wronskian 2.7 Nonhomogeneous ODEs
2.8 Modeling: Forced Oscillations. Resonance 2.9 Modeling: Electric Circuits
2.10 Solution by Variation of Parameters Summary of Chapter 2
2.1 Homogeneous Linear ODEs of Second Order
If r (x) = 0 (that is, r (x) = 0 for all x considered; read “r (x) is identically zero”), then (1) reduces to
(2) y" + p(x)y' + q(x)y = 0
and is called homogeneous. If r (x) ≠ 0, then (1) is c alled nonhomogeneous. This is similar to Sec. 1.5.
For instance, a nonhomogeneous linear ODE is y" + 25y = e– x cos x,
continued
and a homogeneous linear ODE is xy" + y' + xy = 0,
in standard form y" + y' + y = 0.
An example of a nonlinear ODE is y"y + y'2 = 0.
The functions p and q in (1) and (2) are called the c oefficients of the ODEs.
Solutions are defined similarly as for first-order OD Es in Chap. 1. A function
y = h(x)
continued
is called a solution of a (linear or nonlinear) second- order ODE on some open interval I if h is defined and twice differentiable throughout that interval and is such that the ODE becomes an identity if we replace the unknown y by h, the derivative y' by h', and the second derivative y" by h". Examples are given below.
Homogeneous Linear ODEs: Superposition Principle
EXAMPLE1 Homogeneous Linear ODEs: Superposition of Solutions
The functions y = cos x and y = sin x are solutions of the homogeneous linear ODE
y" + y = 0
for all x. We verify this by differentiation and substitu tion. We obtain (cos x)" = – cos x; hence
y" + y (cos x)" + cos x = – cos x + cos x = 0.
continued
Similarly for y = sin x (verify!). We can go an importa nt step further. We multiply cos x by any constant, fo r instance, 4.7, and sin x by, say, – 2, and take the s um of the results, claiming that it is a solution. Indee d, differentiation and substitution gives
(4.7 cos x – 2 sin x)" + (4.7 cos x – 2 sin x)
= – 4.7 cos x + 2 sin x + 4.7 cos x – 2 sin x = 0.
continued
Fundamental Theorem for the Homogeneous Linear ODE (2)
THEOREM 1
For a homogeneous linear ODE (2), any linear combination of two solutions on an open interval I is again a solution of (2) on I. In particular, for such an equation, sums and constant multiples of solutions are again solutions.
PROOF
Let y1 and y2 be solutions of (2) on I. Then by substit uting y = c1y1 + c2y2 and its derivatives into (2), and u sing the familiar rule (c1y1 + c2y2)' = c1y1' + c2y2', etc., we get
y" + py' + qy
= (c1y1 + c2y2)" + p(c1y1 + c2y2)' + q(c1y1 + c2y2) = c1y1" + c2y2" + p(c1y1' + c2y2') + q(c1y1 + c2y2) = c1(y1" + py1' + qy1) + c2(y2" + py2' + qy2) = 0,
since in the last line, (• • •) 0 because y1 and y2 are solutions, by assumption. This shows that y is a solu tion of (2) on I.
EXAMPLE2 A Nonhomogeneous Linear ODE
Verify by substitution that the functions y = 1 + cos x and y=1+sinx are solutions of the nonhomogeneous linear ODE
y" + y = 1,
but their sum is not a solution. Neither is, for instanc e, 2(1 + cos x) or 5(1 + sin x).
EXAMPLE3 A Nonlinear ODE
Verify by substitution that the functions y = x2 and y
= 1 are solutions of the nonlinear ODE y"y – xy = 0,
but their sum is not a solution. Neither is –x2, so you cannot even multiply by –1!
Initial Value Problem. Basis. General Solution
For a second-order homogeneous linear ODE (2) an initial value problem consists of (2) and two initial conditions
(4) y(x0) = K0, y(x0) = K1.
These conditions prescribe given values K0 and K1
of the solution and its first derivative (the slope of its curve) at the same given x = x0 in the open interval considered.
continued
The conditions (4) are used to determine the two arb itrary constants c1 and c2 in a general solution
(5) y = c1y1 + c2y2
of the ODE; here, y1 and y2 are suitable solutions of the ODE.
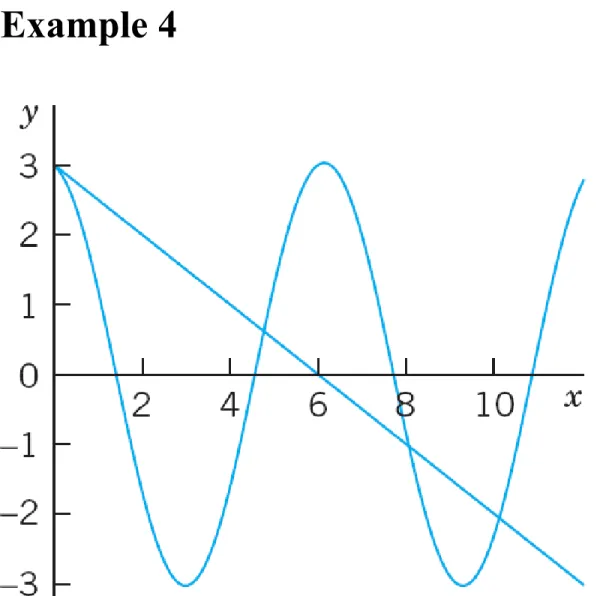
EXAMPLE4 Initial Value Problem Solve the initial value problem
y" + y = 0, y(0) = 3.0, y'(0) = –0.5.
Solution. Step 1. General solution. The functions cos x and sin x are solutions of the ODE (by Exampl e 1), and we take
y = c1 cos x + c2 sin x.
This will turn out to be a general solution as defined below.
continued
Step 2. Particular solution. We need the derivative y' = –c1 sin x + c2 cos x. From this and the initial valu es we obtain, since cos 0 = 1 and sin 0 = 0,
y(0) = c1 = 3.0 and y'(0) = c2 = –0.5.
This gives as the solution of our initial value problem the particular solution
y = 3.0 cos x – 0.5 sin x.
Figure 28 shows that at x = 0 it has the value 3.0 an d the slope –0.5, so that its tangent intersects the x- axis at x = 3.0/0.5 = 6.0. (The scales on the axes diff
er!) continued
Fig. 28.
Particular solution and initial tangent in Example 4General Solution, Basis, Particular Solution
DEFINITION
A general solution of an ODE (2) on an open interval I is a solution (5) in which y1 and y2 are solutions of (2) on I that are not proportional, and c1 and c2 are arbitrary constants. These y1, y2 are called a basis (or a fundamental system) of solutions of (2) on I.
A particular solution of (2) on I is obtained if we assign specific values to c1 and c2 in (5).
Namely, two functions y1 and y2 are called linearly independent on an interval I where they are defined if
(7) k1y1(x) + k2y2(x) = 0 everywhere on I implies
k1 = 0 and k2 = 0.
continued
And y1 and y2 are called linearly dependent on I if (7) also holds for some constants k1, k2 not both zer o. Then if k1 ≠ 0 or k2 ≠ 0, we can divide and see that y1 and y2 are proportional,
y1 = – y2 or y2 = – y1 .
In contrast, in the case of linear independence these functions are not proportional because then we cann ot divide in (7). This gives the following
Basis (Reformulated)
DEFINITION
A basis of solutions of (2) on an open interval I is a pair of linearly independent solutions of (2) on I.
EXAMPLE5 Basis, General Solution, Particular Solution
cos x and sin x in Example 4 form a basis of solution s of the ODE y" + y = 0 for all x because their quotie nt is cot x ≠ const (or tan x ≠ const). Hence y = c1 co s x + c2 sin x is a general solution. The solution y = 3 .0 cos x – 0.5 sin x of the initial value problem is a p articular solution.
EXAMPLE6 Basis, General Solution, Particular Solution
Verify by substitution that y1 = ex and y2 = e–x are sol utions of the ODE y" – y = 0. Then solve the initial v alue problem
y – y = 0, y(0) = 6, y'(0) = –2.
continued
Solution. (ex)" – ex = 0 and (e–x)" – e–x = 0 shows that ex and e–x are solutions. They are not proportional, ex/e–x = e2x ≠ const. Hence ex, e–x form a basis for all x. We now write down the corresponding general solution and its derivative and equate their values at 0 to the given initial conditions,
y = c1ex + c2e–x, y' = c1ex – c2e–x,
y(0) = c1 + c2 = 6, y'(0) = c1 – c2 = –2.
By addition and subtraction, c1 = 2, c2 = 4, so that the answer is y = 2ex + 4e–x. This is the particular solution satisfying the two initial conditions.
Find a Basis if One Solution Is Known. Reduction of Order
EXAMPLE7 Reduction of Order if a Solution Is Known.
Basis
Find a basis of solutions of the ODE (x2 – x)y" – xy' + y = 0.
Solution. Inspection shows that y1 = x is a solution because y'1 = 1 and y"1 = 0, so that the first term van ishes identically and the second and third terms can cel. The idea of the method is to substitute
y = uy1 = ux, y' = u'x + u, y" = u"x + 2u into the ODE. This gives
(x2 – x)(u"x + 2u') – x(u'x + u) + ux = 0.
continued
ux and –xu cancel and we are left with the following ODE, which we divide by x, order, and simplify,
(x2 – x)(u"x + 2u') – x2u' = 0, (x2 – x)u" + (x – 2)u' = 0.
This ODE is of first order in v = u', namely, (x2 – x)v'+
(x – 2)v = 0. Separation of variables and integration gives
continued
We need no constant of integration because we wa nt to obtain a particular solution; similarly in the next integration. Taking exponents and integrating again, we obtain
Since y1 = x and y2 = x ln∣x│+ 1 are linearly indepe ndent (their quotient is not constant), we have obtain ed a basis of solutions, valid for all positive x.
2.2 Homogeneous Linear ODEs with Constant Coefficients
We shall now consider second-order homogeneous linear ODEs whose coefficients a and b are constant ,
(1) y" + ay' + by = 0.
These equations have important applications, especi ally in connection with mechanical and electrical vibr ations, as we shall see in Secs. 2.4, 2.8, and 2.9.
continued
How to solve (1)? We remember from Sec. 1.5 that t he solution of the first-order linear ODE with a const ant coefficient k
y' + ky = 0
is an exponential function y = ce–kx. This gives us th e idea to try as a solution of (1) the function
(2) y = eλx.
continued
Substituting (2) and its derivatives y = λeλx and y = λ2eλx into our equation (1), we obtain (λ2 + aλ + b)eλx = 0.
Hence if λ is a solution of the important characterist ic equation (or auxiliary equation)
(3) λ2 + aλ + b = 0
continued
then the exponential function (2) is a solution of the ODE (1). Now from elementary algebra we recall that the roots of this quadratic equation (3) are
(4)
(3) and (4) will be basic because our derivation shows that the functions
(5)
are solutions of (1). Verify this by substituting (5)
into (1). continued
From algebra we further know that the quadratic equ ation (3) may have three kinds of roots, depending o n the sign of the discriminant a2 – 4b, namely,
(Case I) Two real roots if a2 – 4b > 0,
(Case II) A real double root if a2 – 4b = 0,
(Case III) Complex conjugate roots if a2 – 4b < 0.
Case I. Two Distinct Real Roots λ1 and λ2
In this case, a basis of solutions of (1) on any interv al is
because y1 and y2 are defined (and real) for all x and their quotient is not constant. The corresponding ge neral solution is
(6)
EXAMPLE1 General Solution in the Case of Distinct Real Roots
We can now solve y" - y = 0 in Example 6 of Sec. 2.
1 systematically. The characteristic equation isλ2 – 1
= 0. Its roots areλ1 = 1 andλ2 = –1. Hence a basis of solutions is ex and e-x and gives the same general so lution as before,
y = c1ex + c2e-x.
EXAMPLE2 Initial Value Problem in the Case of Distinct Real Roots
Solve the initial value problem
y" + y' – 2y = 0, y(0) = 4, y'(0) = –5.
Solution. Step 1. General solution. The characteri stic equation is
λ2 + λ – 2 = 0.
Its roots are
so that we obtain the general solution y = c1ex + c2e-2x.
continued
Step 2. Particular solution. Since y'(x) = c1ex – 2c2
e-2x, we obtain from the general solution and the initi al conditions
y(0) = c1 + c2 = 4,
y'(0) = c1 – 2c2 = –5.
Hence c1 = 1 and c2 = 3. This gives the answer y = e
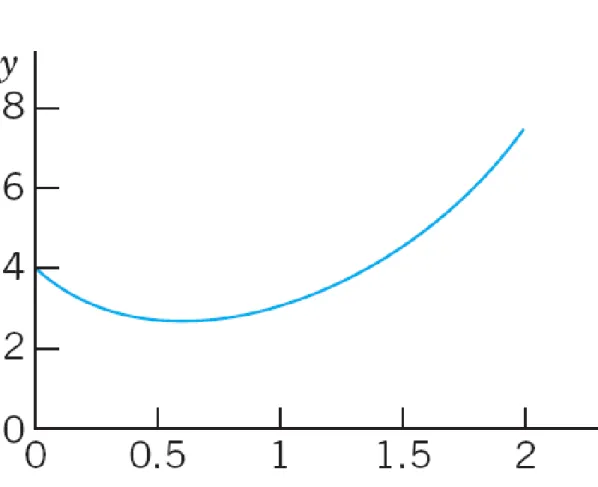
x + 3e-2x. Figure 29 shows that the curve begins at y
= 4 with a negative slope (–5, but note that the axes have different scales!), in agreement with the initial c onditions.
continued
Fig. 29.
Solution in Example 2Case II. Real Double Root λ = – a/2
If the discriminant a2 – 4b is zero, we see directly fro m (4) that we get only one root,λ=λ1 =λ2 = – a/2, hen ce only one solution,
y1 = e-(a/2)x.
in the case of a double root of (3) a basis of solution s of (1) on any interval is
e-ax/2, xe-ax/2.
The corresponding general solution is (7) y = (c1 + c2x)e-ax/2.
EXAMPLE3 General Solution in the Case of a Double Root
The characteristic equation of the ODE y" + 6y' + 9y
= 0 isλ2 + 6λ+ 9 = (λ+ 3)2 = 0. It has the double root λ = –3. Hence a basis is e-3x and xe-3x. The correspo nding general solution is y = (c1 + c2x)e-3x.
EXAMPLE4 Initial Value Problem in the Case of a Double Root
Solve the initial value problem
y" + y' + 0.25y = 0, y(0) = 3.0, y'(0) = –3.5.
Solution. The characteristic equation is λ2 +λ+ 0.25
= (λ+ 0.5)2 = 0. It has the double rootλ= –0.5. This gi ves the general solution
y = (c1 + c2x)e-0.5x.
continued
We need its derivative
y' = c2e-0.5x – 0.5(c1 + c2x)e-0.5x.
From this and the initial conditions we obtain y(0) = c1 = 3.0, y'(0) = c2 – 0.5c1 = 3.5;
hence c2 = –2.
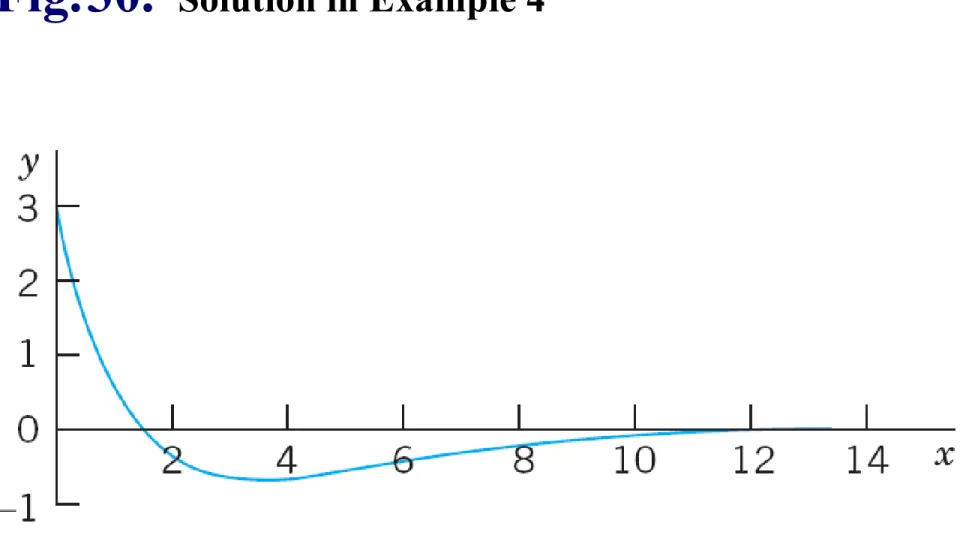
The particular solution of the initial value problem is y = (3 – 2x)e-0.5x. See Fig. 30.
continued
Fig. 30.
Solution in Example 4Case III. Complex Roots – 1/2a + iω and – 1/2a – iω
This case occurs if the discriminant a2 – 4b of the ch aracteristic equation (3) is negative. In this case, the roots of (3) and thus the solutions of the ODE (1) co me at first out complex. However, we show that from them we can obtain a basis of real solutions
(8) y1 = e-ax/2 cos ωx, y2 = e-ax/2 sin ωx
(ω > 0)
continued
where ω2 = b – 1/4a2. It can be verified by substitutio n that these are solutions in the present case. We s hall derive them systematically after the two exampl es by using the complex exponential function. They f orm a basis on any interval since their quotient cot x is not constant. Hence a real general solution in Cas e III is
(9) y = e-ax/2 (A cos ωx + B sin ωx)
(A, B arbitrary).
EXAMPLE5 Complex Roots. Initial Value Problem Solve the initial value problem
y" + 0.4y' + 9.04y = 0, y(0) = 0, y'(0) = 3.
Solution. Step1. General solution. The characteristic equation is λ2 + 0.4λ+ 9.04 = 0. It has the roots –0.2 ± 3i. Hence ω = 3, and a general solution (9) is
y = e-0.2x(A cos 3x + B sin 3x).
Step 2. Particular solution. The first initial condition gives y(0) = A = 0. The remaining expression is y = B e-0.2x sin 3x. We need the derivative (chain rule!)
continued
y' = B(–0.2e-0.2x sin 3x + 3e-0.2x cos 3x).
From this and the second initial condition we obtain y'(0) = 3B = 3. Hence B = 1. Our solution is
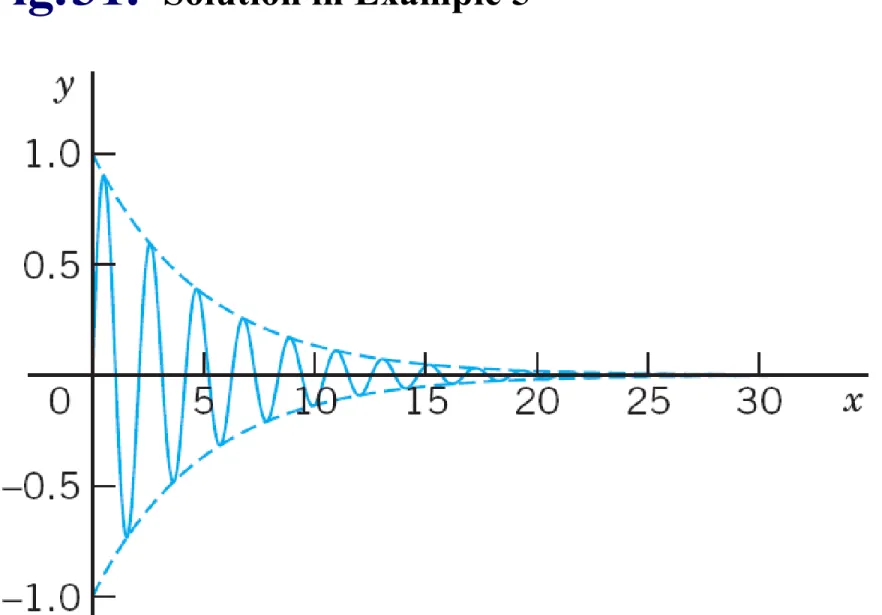
y = e-0.2x sin 3x.
Figure 31 shows y and the curves of e-0.2x and –e-0.2x (dashed), between which the curve of y oscillates. S uch “damped vibrations” (with x = t being time) have important mechanical and electrical applications, as we shall soon see (in Sec. 2.4).
continued
Fig. 31.
Solution in Example 5EXAMPLE6 Complex Roots A general solution of the ODE
y" + ω2y = 0 (ω constant, not zero) is
y = A cos ωx + B sin ωx.
With ω = 1 this confirms Example 4 in Sec. 2.1.
Summary of Cases I–III
Derivation in Case III.
Complex Exponential Function
If verification of the solutions in (8) satisfies you, skip the systematic derivation of these real solutions fro m the complex solutions by means of the complex e xponential function ez of a complex variable z = r + it . We write r + it, not x + iy because x and y occur in t he ODE. The definition of ez in terms of the real func tions er, cos t, and sin t is
(10) ez = er + it = ereit = er(cos t + i sin t).
continued
(11) eit = cos t + i sin t,
called the Euler formula. Multiplication by er gives (10).
For later use we note that e-it = cos (–t) + i sin (–t) c os t – i sin t, so that by addition and subtraction of thi s and (11),
(12)
2.3 Differential Operators. Optional
EXAMPLE1 Factorization, Solution of an ODE Factor P(D) = D2 – 3D – 40I and solve P(D)y = 0.
Solution. D2 – 3D – 40I = (D – 8I)(D + 5I) because I2
= I. Now (D – 8I)y = y – 8y = 0 has the solution y1 = e8x. Similarly, the solution of (D + 5I)y = 0 is y2 = e-5x. This is a basis of P(D)y = 0 on any interval. From th e factorization we obtain the ODE, as expected,
continued
(D – 8I)(D + 5I)y = (D – 8I)(y' + 5y)
= D(y' + 5y) – 8(y' + 5y) = y'' + 5y' – 8y' – 40y = y'' – 3y' – 40y = 0.
Verify that this agrees with the result of our method i n Sec. 2.2. This is not unexpected because we facto red P(D) in the same way as the characteristic polyn omial P(λ) = λ2 – 3λ – 40.
2.4 Modeling: Free Oscillations (Mass–Spring System)
Linear ODEs with constant coefficients have importa nt applications in mechanics, as we show now (and i n Sec. 2.8), and in electric circuits (to be shown in S ec. 2.9). In this section we consider a basic mechani cal system, a mass on an elastic spring (“mass-sprin g system,” Fig. 32), which moves up and down. Its model will be a homogeneous linear ODE.
Setting Up the Model
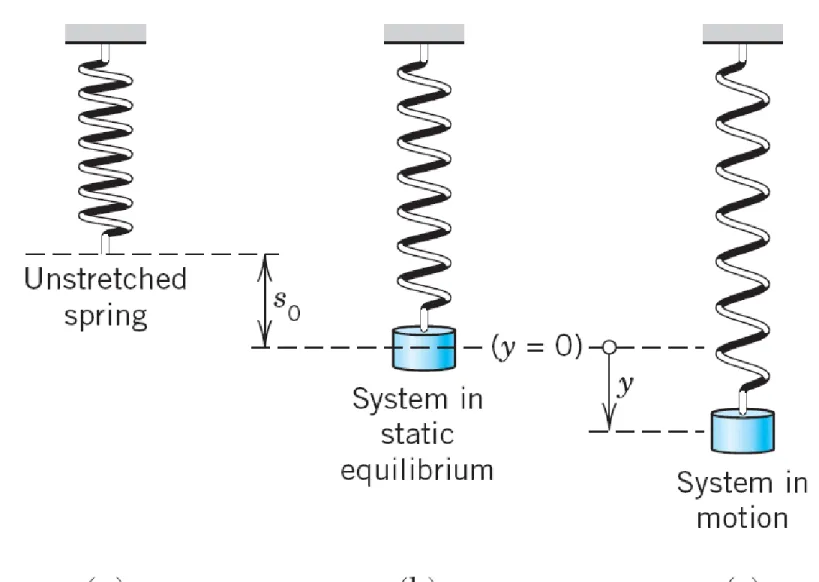
We take an ordinary spring that resists compression as well extension and suspend it vertically from a fixed support, as shown in Fig. 32. At the lower end of the spring we attach a body of mass m. We assume m to be so large that we can neglect the mass of the spring. If we pull the body down a certain distance and then release it, it starts moving.
We assume that it moves strictly vertically.
continued
Fig. 32.
Mechanical mass–spring systemcontinued
How can we obtain the motion of the body, say, the displacement y(t) as function of time t? Now this moti on is determined by Newton’s second law
(1) Mass × Acceleration = my" = Force
where y" = d2y/dt2 and “Force” is the resultant of all t he forces acting on the body.
(For systems of units and conversion factors, see th e inside of the front cover.)
We choose the downward direction as the positiv e direction, thus regarding downward forces as posi tive and upward forces as negative.
continued
Consider Fig. 32. The spring is first unstretched. We now attach the body. This stretches the spring by an amount s0 shown in the figure. It causes an upward f orce F0 in the spring. Experiments show that F0 is pr oportional to the stretch s0, say,
(2) F0 = –ks0 (Hooke’s law2).
k (> 0) is called the spring constant (or spring mod ulus). The minus sign indicates that F0 points upwar d, in our negative direction. Stiff springs have large k . (Explain!)
continued
The extension s0 is such that F0 in the spring balanc es the weight W = mg of the body (where g = 980 c m/sec2 = 32.17 ft /sec2 is the gravitational constant).
Hence F0 + W = –ks0 + mg = 0. These forces will not affect the motion. Spring and body are again at rest.
This is called the static equilibrium of the system (Fig. 32b). We measure the displacement y(t) of the body from this ‘equilibrium point’ as the origin y = 0, downward positive and upward negative.
continued
From the position y = 0 we pull the body downward.
This further stretches the spring by some amount y
> 0 (the distance we pull it down). By Hooke’s law th is causes an (additional) upward force F1 in the sprin g,
F1 = –ky.
F1 is a restoring force. It has the tendency to restor e the system, that is, to pull the body back to y = 0.
Undamped System: ODE and Solution
Every system has damping—otherwise it would keep moving forever. But practically, the effect of damping may often be negligible, for example, for the motion of an iron ball on a spring during a few minutes. The n F1 is the only force in (1) causing the motion. Henc e (1) gives the model my" = –ky or
(3) my" + ky = 0.
We obtain as a general solution (4) y(t) = A cos ω0 t B sin ω0 t,
The corresponding motion is called a harmonic osc illation.
continued
Since the trigonometric functions in (4) have the peri od 2π/ω0, the body executes ω0/2π cycles per seco nd. This is the frequency of the oscillation, which is also called the natural frequency of the system. It i s measured in cycles per second. Another name for cycles/sec is hertz (Hz).
The sum in (4) can be combined into a phase-shifted cosine with amplitude and phase angle δ
= arctan (B/A),
(4*) y(t) = C cos (ω0t – δ).
continued
Fig. 33.
Harmonic oscillationsEXAMPLE1 Undamped Motion. Harmonic Oscillation If an iron ball of weight W = 98 nt (about 22 lb) stretc hes a spring 1.09 m (about 43 in.), how many cycles per minute will this mass–spring system execute? W hat will its motion be if we pull down the weight an a dditional 16 cm (about 6 in.) and let it start with zero initial velocity?
Solution. Hooke’s law (2) with W as the force and 1.
09 meter as the stretch gives W = 1.09k; thus k = W/
1.09 = 98/1.09 = 90 [kg/sec2] = 90 [nt/meter]. The m ass is m = W/g = 98/9.8 = 10 [kg]. This gives the fre quency ω0/(2π) = (k/m)1/2/(2π) = 3/(2π) = 0.48 [Hz] = 29 [cycles/min].
continued
From (4) and the initial conditions, y(0) = A = 0.16 [meter] and y'(0) = ω0B = 0. Hence the motion is
y(t) = 0.16 cos 3t [meter] or 0.52 cos 3t [ft]
If you have a chance of experimenting with a mass–
spring system, don’t miss it. You will be surprised ab out the good agreement between theory and experi ment, usually within a fraction of one percent if you measure carefully.
continued
Fig. 34.
Harmonic oscillation in Example 1Damped System: ODE and Solutions
We now add a damping force F2 = –cy'
to our model my" = –ky, so that we have my" = –ky – cy' or
(5) my" + cy' + ky = 0.
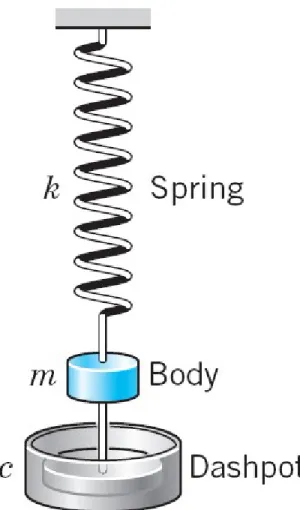
Physically this can be done by connecting the body t o a dashpot; see Fig. 35. We assume this new force to be proportional to the velocity y' = dy/dt, as shown . This is generally a good approximation, at least for small velocities.
continued
Fig. 35.
Damped systemcontinued
c is called the damping constant. We show that c i s positive. If at some instant, y' is positive, the body i s moving downward (which is the positive direction).
Hence the damping force F2 = –cy', always acting ag ainst the direction of motion, must be an upward forc e, which means that it must be negative, F2 = –cy' <
0, so that – c < 0 and c > 0. For an upward motion, y' < 0 and we have a downward F2 = –cy' > 0; hence –c < 0 and c > 0, as before.
continued
The ODE (5) is homogeneous linear and has constant coefficients. Hence we can solve it by the method in Sec. 2.2. The characteristic equation is (divide (5) by m)
By the usual formula for the roots of a quadratic equation we obtain, as in Sec. 2.2,
(6)
continued
It is now most interesting that depending on the amount of damping (much, medium, or little) there will be three types of motion corresponding to the three Cases I, II, II in Sec. 2.2:
Discussion of the Three Cases
Case I. Overdamping
If the damping constant c is so large that c2 > 4mk, t hen λ1 and λ2 are distinct real roots. In this case the corresponding general solution of (5) is
(7) y(t) = c1e-(α-β)t + c2e-(α+β)t.
continued
We see that in this case, damping takes out energy so quickly that the body does not oscillate. For t > 0 both exponents in (7) are negative because α > 0, β
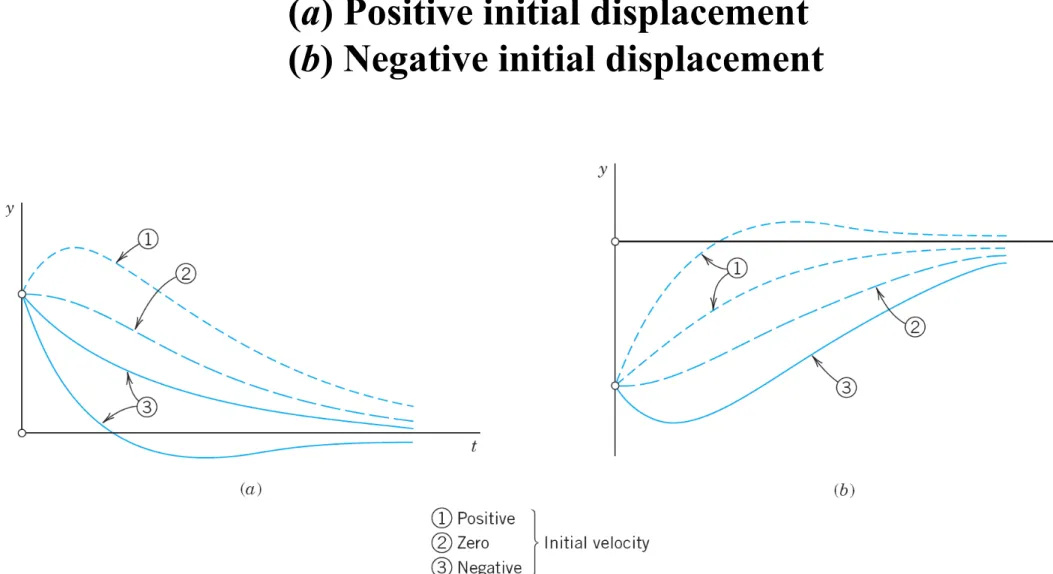
> 0, and β2 = α2 – k/m < α2. Hence both terms in (7) approach zero as t → ∞. Practically speaking, after a sufficiently long time the mass will be at rest at the static equilibrium position (y = 0). Figure 36 shows (7) for some typical initial conditions.
continued
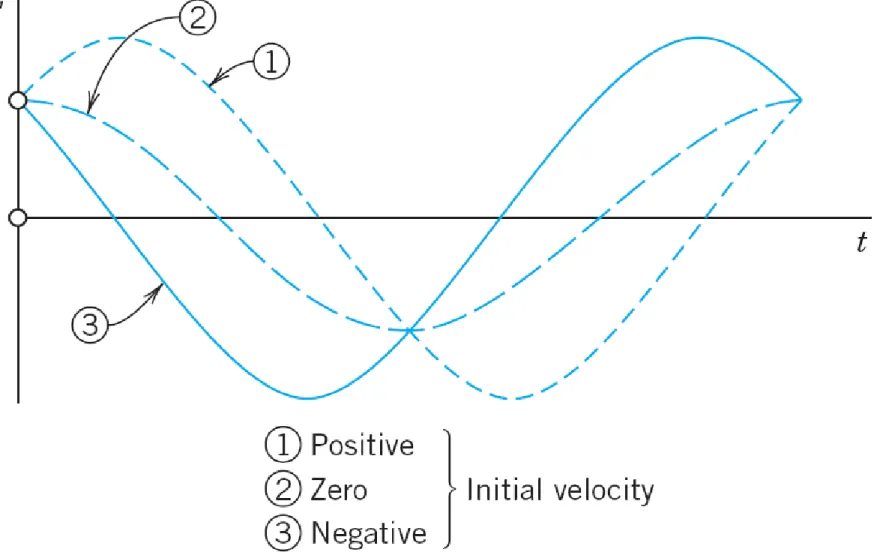
Fig. 36.
Typical motions (7) in the overdamped case (a) Positive initial displacement(b) Negative initial displacement
Case II. Critical Damping
Critical damping is the border case between nonosci llatory motions (Case I) and oscillations (Case III). It occurs if the characteristic equation has a double ro ot, that is, if c2 = 4mk, so that β = 0, λ1 = λ2 = –α. The n the corresponding general solution of (5) is
(8) y(t) = (c1 + c2t)e-αt.
continued
This solution can pass through the equilibrium positi on y = 0 at most once because e-αt is never zero and c1 + c2t can have at most one positive zero. If both c1 and c2 are positive (or both negative), it has no positi ve zero, so that y does not pass through 0 at all. Fig ure 37 shows typical forms of (8). Note that they loo k almost like those in the previous figure.
continued
Fig. 37.
Critical damping [see (8)]Case III. Underdamping
This is the most interesting case. It occurs if the da mping constant c is so small that c2 < 4mk. Then in (6) is no longer real but pure imaginary, say,
(9) β = iω*
(We write ω* to reserve for driving and electromotiv e forces in Secs. 2.8 and 2.9.) The roots of the char acteristic equation are now complex conjugate,
λ1 = –α+ iω*, λ2 = –α– iω*
continued
with α = c/(2m), as given in (6). Hence the correspo nding general solution is
(10) y(t) = e-αt(A cos ω*t + B sin ω*t) = Ce-αt cos (ω*t – δ)
where C2 = A2 + B2 and tan δ = B/A, as in (4*).
This represents damped oscillations. Their curve li es between the dashed curves y = Ce-αt and y = –C e-αt in Fig. 38, touching them when ω*t –δ is an integ er multiple of π because these are the points at whic h cos (ω*t –δ) equals 1 or –1.
continued
The frequency is ω*/(2π) Hz (hertz, cycles/sec). Fro m (9) we see that the smaller c (> 0) is, the larger is ω* and the more rapid the oscillations become. If c a pproaches 0, then ω* approaches ω0 = (k/m)1/2, givin g the harmonic oscillation (4), whose frequency ω0/ (2π) is the natural frequency of the system.
continued
Fig. 38.
Damped oscillation in Case III [see (10)]EXAMPLE2 The Three Cases of Damped Motion
How does the motion in Example 1 change if we change the damping constant c to one of the following three values, with y(0) = 0.16 and y'(0) = 0 as before?
(I) c = 100 kg/sec, (II) c = 60 kg/sec, (III) c = 10 kg/sec.
Solution. It is interesting to see how the behavior of the system changes due to the effect of the damping, which takes energy from the system, so that the oscillations decrease in amplitude (Case III) or even disappear (Cases II and I).
continued
(I) With m = 10 and k = 90, as in Example 1, the mo del is the initial value problem
10y" +100y' + 90y = 0, y(0) = 0.16 [meter], y'(0) = 0 .
The characteristic equation is 10λ2 + 100λ+ 90 = 10(λ+ 9)(λ+ 1) = 0. It has the roots –9 and –1. This g ives the general solution
y = c1e-9t + c2e-t.
We also need y' = –9c1e-9t – c2e-t.
continued
The initial conditions give c1 + c2 = 0.16, –9c1 – c2 = 0. The solution is c1 = –0.02, c2 = 0.18. Hence in the overdamped case the solution is
y = –0.02e-9t + 0.18e-t.
It approaches 0 as t → ∞. The approach is rapid; aft er a few seconds the solution is practically 0, that is, the iron ball is at rest.
continued
(II) The model is as before, with c = 60 instead of 100. T he characteristic equation now has the form 10λ2 + 60λ+
90 = 10(λ+ 3)2 = 0. It has the double root –3. Hence the c orresponding general solution is
y = (c1 + c2t)e-3t.
We also need y' = (c2 – 3c1 – 3c2t)e-3t.
The initial conditions give y(0) = c1 = 0.16, y'(0) = c2 – 3c1
= 0, c2 = 0.48. Hence in the critical case the solution is y = (0.16 + 0.48t)e-3t.
It is always positive and decreases to 0 in a monotone fa shion.
continued
(III) The model now is 10y" + 10y' + 90y = 0. Since c
= 10 is smaller than the critical c, we shall get oscilla tions. The characteristic equation is 10λ2 + 10λ+ 90
= . It has the complex roots [se e (4) in Sec. 2.2 with a = 1 and b = 9]
This gives the general solution
y e-0.5t(A cos 2.96t + B sin 2.96t).
Thus y(0) = A = 0.16. We also need the derivative
continued
y = e-0.5t(–0.5A cos 2.96t – 0.5B sin 2.96t – 2.96A sin 2.96t + 2.96B cos 2.96t).
Hence y'(0) = –0.5A + 2.96B = 0, B = 0.5A/2.96 = 0.027.
This gives the solution
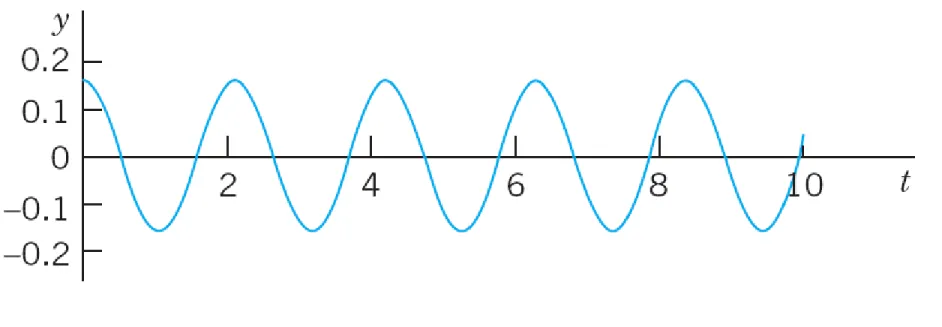
y = e-0.5t(0.16 cos 2.96t + 0.027 sin 2.96t) = 0.162e-0.5t cos (2.96t – 0.17).
We see that these damped oscillations have a smaller frequency than the harmonic oscillations in Example 1 by about 1% (since 2.96 is smaller than 3.00 by about 1%). Their amplitude goes to zero. See Fig. 39.
continued
Fig. 39.
The three solutions in Example 22.5 Euler–Cauchy Equations
Euler–Cauchy equations are ODEs of the form (1) x2y" + axy' + by = 0
with given constants a and b and unknown y(x). We substitute
(2) y = xm
and its derivatives y' = mxm-1 and y'' = m(m – 1)xm-2 i nto (1).
This gives
x2m(m – 1)xm-2 + axmxm-1 + bxm = 0.
continued
We now see that (2) was a rather natural choice bec ause we have obtained a common factor xm. Droppi ng it, we have the auxiliary equation m(m – 1) + am + b = 0 or
(3) m2 + (a – 1)m + b = 0. (Note: a – 1, not a.) Hence y = xm is a solution of (1) if and only if m is a r
oot of (3).
Case I. If the roots m1 and m2 are real and different, then solutions are
and
They are linearly independent since their quotient is not constant. Hence they constitute a basis of solutions of (1) for all x for which they are real. The corresponding general solution for all these x is
(5) (c1, c2
arbitrary).
EXAMPLE1 General Solution in the Case of Different Real Roots
The Euler–Cauchy equation
x2y" + 1.5xy' – 0.5y = 0 has the auxiliary equation
m2 + 0.5m – 0.5 = 0. (Note: 0.5, not 1.5!) The roots are 0.5 and –1. Hence a basis of solutions
for all positive x is y1 = x0.5 and y2 = 1/x and gives the general solution
(x > 0).
Case II. Equation (4) shows that the auxiliary equati on (3) has a double root m1 = 1/2(1 – a) if and only i f (1 – a)2 – 4b = 0. The Euler–Cauchy equation (1) th en has the form
(6)
In this “critical case,” a basis of solutions for positive x is y1 = xm and y2 = xm ln x, where m = 1/2(1 – a). Li near independence follows from the fact that the qu otient of these solutions is not constant. Hence, for a ll x for which y1 and y2 are defined and real, a gener al solution is
(7) m = 1/2(1 – a)
EXAMPLE2 General Solution in the Case of a Double Root
The Euler–Cauchy equation x2y" – 5xy' + 9y = 0 has the auxiliary equation m2 – 6m + 9 = 0. It has the do uble root m = 3, so that a general solution for all posi tive x is
y = (c1 + c2 ln x) x3.
Case III. The case of complex roots is of minor pract ical importance, and it suffices to present an exampl e that explains the derivation of real solutions from c omplex ones.
EXAMPLE3 Real General Solution in the Case of Complex Roots
The Euler–Cauchy equation
x2y" + 0.6xy' + 16.04y = 0
has the auxiliary equation m2 – 0.4m + 16.04 = 0. Th e roots are complex conjugate, m1 = 0.2 + 4i and m2
= 0.2 – 4i, where i = (–1)1/2. (We know from algebra t hat if a polynomial with real coefficients has complex roots, these are always conjugate.) Now use the tric k of writing x = eln x and obtain
continued
Next apply Euler’s formula (11) in Sec. 2.2 with t = 4 ln x to these two formulas. This gives
Add these two formulas, so that the sine drops out, and divide the result by 2. Then subtract the second formula from the first, so that the cosine drops out, a nd divide the result by 2i. This yields
x0.2 cos (4 ln x) and x0.2 sin (4 ln x)
continued
respectively. By the superposition principle in Sec. 2 .2 these are solutions of the Euler–Cauchy equation (1). Since their quotient cot (4 ln x) is not constant, t hey are linearly independent. Hence they form a bas is of solutions, and the corresponding real general s olution for all positive x is
(8) y = x0.2[A cos (4 ln x) + B sin (4 ln x)].
Figure 47 shows typical solution curves in the three cases discussed, in particular the basis functions in Examples 1 and 3.
continued
Fig. 47.
Euler–Cauchy equationsEXAMPLE4 Boundary Value Problem.
Electric Potential Field Between Two Concentric Spheres
Find the electrostatic potential v = v(r) between two concentric spheres of radii r1 = 5 cm and r2 = 10 cm kept at potentials v1 = 110 V and v2 = 0, respectively.
Physical Information. v(r) is a solution of the Euler –Cauchy equation rv" + 2v' = 0, where v' = dv/dr.
continued
![Fig. 37. Critical damping [see (8)]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9217706.478380/76.1080.145.842.76.739/fig-critical-damping-see.webp)
