Volume19, No1, November 2014, pp. 13-35
1國立台灣大學土木工程學系 碩士 收到日期:民國 102 年 03 月 14 日
2國立台灣大學土木工程學系 助理教授 修改日期:民國 102 年 07 月 21 日
3,5國立中央大學太空及遙測研究中心 副教授 接受日期:民國 102 年 08 月 14 日
*通訊作者, 電話: 02-33664260, E-mail: hsuph.ntu.edu.tw
以物件為基礎之光達點雲分類
林耿帆
1徐百輝
2*摘 要
近年來,影像分類方法逐漸由像元式發展為物件式分類,其藉由像元間之空間關係建立影像物件,
並納入影像物件之光譜、形狀、及紋理等物件特徵作為分類依據,進而提高影像分類之成效。本研究嘗 試將二維物件式影像分類架構延伸至三維光達點雲分類,期望藉由物件分類之觀念提升光達資料自動分 類目標物之能力。本研究首先將光達點雲資料自動分割為獨立的三維點雲物件,接續利用自行設計之物 件特徵進行特徵萃取,最後以物件特徵自動化分類點雲。實驗中分別以空載及地面光達資料進行測試。
在空載光達部份,研究中選用結構物、樹及車輛作為分類標的,於整體分類精度與 Kappa 值分別達到 98.40
% 與 0.9638 之分類成效;在地面光達部份,本研究選用建物、小型結構物、樹、樹幹與樹叢等類別作為 分類目標,整體分類精度與 Kappa 值分別為 84.28% 與 0.7221。由實驗結果可知,以物件為基礎之光達 點雲分類,能藉由描述點群具有的空間特性輔助點雲資料之判釋,不僅有效提升分類成果之完整性,在 分類品質上亦能有不錯的表現。
關鍵詞:物件式分類、分割、特徵萃取、決策規則
1. 前言
隨著地球環境不斷地變遷,人類對地表及周遭 環境的監測與探索需求也不斷增加,如何快速取得 地表影像並進行有效的分類及分析,一直是遙測領 域中重要的研究議題。傳統的遙測分類技術主要以 衛星影像為分析對象,原因在於衛星影像提供了地 物的光譜資訊,藉由各物種於不同波段的光譜響應 (response) 特性,即能分類不同的地物。隨測繪技 術的進步,以「光達」(Light Detection And Ranging, LiDAR) 系統快速獲取大量三維地物點坐標,也逐 漸成為重要的空間資訊量測方式之一。相較於影像,
光達點雲特有的三維幾何特性能提供地物分類另 一種判釋資訊。
過去以影像為 主進行分 類 時,常採像元 式 (pixel-based) 分類方式進行分析。隨影像解析度的 提升,像元與像元之間的空間關係與所包含的資訊
更趨豐富、多元,造成傳統像元式分類模式不敷使 用。因應此需求,影像分類模式亦由單一像元的考 量逐步發展為以物件為基礎 (object-based) 的概 念。相較於傳統分類模式,以物件為基礎的分類模 式額外考量鄰近像元組成的形狀 (shape)、紋理 (texture) 等空間特徵 (spatial feature) 作為分類依 據,因此能藉由資訊維度的增加,有效輔助光譜特 性混淆時的判釋,提升分類成果的完整性及合理性 (莊雲翰,2002;Oruc et al., 2004;鄭雅文等,2008;
徐百輝,2010),如圖 1。另一方面,隨近年來空間 資訊獲取需求急遽增加,如何快速、精準地得知地 物於三維空間中之分佈顯得格外重要。鑒於光達系 統具有直接記錄三維坐標與多重反射回波特性,許 多研究陸續採直接分類點雲的方式獲取地物資訊。
然而,光達雖具有快速、精準、高自動化取得大量 物空間資料的能力,卻非以量測待測物主要特徵點 方式執行施測,因此在資訊工程領域中常被視為盲
系統 (blind system)。受盲系統特性與資料缺乏光 譜反應的影響,光達點坐標間之幾何從屬關係不易 確立,造成後端應用常需引入其它輔助資訊,或降 低萃取資訊之複雜度,才可藉由特定的幾何約制,
提升點雲使用效益 (賴泓瑞等,2010;羅英哲及曾 義星,2009)。
以往於光達點雲的分類上,大多先從幾何特徵 萃取 (geometric feature extraction) 的角度出發,利 用多種數學模型、判斷程序,逐步找出符合幾何約 制之點、線、面等特徵 (王淼等,2005;王偉立,
2008;羅英哲及曾義星,2009)。為提升光達點雲 於各種目標物的辨識效益,近年來開始有研究嘗試 將傳統先進行點、線、面等特徵萃取,再對特徵進 行分類或建模的兩階段分類,轉變成直接對三維點 雲 資 料 進 行 地 物 分 類 (Carlberg et al., 2009;
Moussa and El-Sheimy, 2010; Samadzadegan et al., 2010; Shapovalov et al., 2010),其中受類概念之限 制,分類成果普遍局限於分出建物、植生與地表點 位等地物類別。
由影像與光達的資料特性來看,影像提供豐富 的光譜資訊作為分類時的依據,並在加入物件的概 念後,建立了像元間的空間從屬關係使資訊維度提 升,進而改善分類效益。相對地,光達則提供豐富 的幾何資訊,若能進一步建構點雲間之幾何從屬關 係,直接利用點群具有的空間分佈特性分類地物,
應可提升點雲後端的應用效益。有鑑於此,本研究 嘗 試 將 過 去 以 物 件 為 基 礎 的 影 像 分 析 概 念 (object-based image analysis, OBIA) 延伸至三維光 達點雲分類,期能藉由量化基本幾何構型以外的特 徵並建立額外的分類指標,提升光達點雲自動化分 類各式地物的可行性,本研究稱之為以物件為基礎 之光達點雲分析 (object-based point cloud analysis, OBPCA)。
2. 相關研究
近年來許多研究成果顯示,OBIA 用於影像分 類已有相當優異的成效 (Oruc et al., 2004;鄭雅文 等,2008;徐百輝,2010)。而光達點雲處理程序 中,亦有一些研究勾勒出該架構的雛形。有鑑於此,
以下將簡述相關研究背景。
2.1 OBIA
鑒於本研究主要從 OBIA 概念出發,以下將簡 述其基本架構。
2.1.1 影像分割
影像分割是依據特定原則將一整幅影像切割 為更小的區塊或物件,而更廣泛的影像分割操作除 了包含影像物件的切割 (subdividing) 之外,尚包 含物件形狀調整 (reshape) 以及物件之間的的合 併 (merging) (Definiens, 2007),如圖 2,R1 為區域 切割過程,R2 為區域成長示意,R3 則為區域合併 之過程與結果。由於 OBIA 必須以區塊作為物件 的基本單元,因此常使用資料導向之分割方式,利 用相同物件在空間或光譜特徵上接近、不同物件彼 此分開之基本特性,叢聚 (clustering) 出相似特徵 之區塊。當完成影像區塊分割時,後續分類動作則 以這些分割後之小區塊為基本單元,進行影像分類 之工作。其中,由過去 OBIA 相關研究可知,大 部分以物件為基礎的分析過程提及的「物件」概念,
是指由相似空間特徵的資料所構成的群集或影像 區塊,並不局限於特定的「物體」(Oruc et al., 2004;
鄭雅文等,2008;徐百輝,2010)。
2.1.2 物件特徵萃取
完成影像分割後,形成由多個區塊物件所構成 的影像,使用者需賦予這些區塊一些屬性或特徵資 訊,再利用這些屬性或特徵來區分不同的區塊。為 了對這些區塊物件進行分類,首先須進行物件特徵 萃取。這些特徵包括地物的光譜特徵、形狀特徵、
或紋理特徵等。其中,光譜特徵可以是各波段反射 值之統計量或光譜指標,如常態化差值植被指標 (normalized difference vegetation index, NDVI) 、 RGB 統計特徵、綠度比 (green ratio) 等;形狀特 徵包括緊緻度 (compactness)、密度 (density)、長 寬比 (length/width)、圓度 (roundness) 等。紋理特 徵 則 包 含 常 見 的 灰 階 共 生 矩 陣 (gray level co-occurrence matrix, GLCM),可計算出許多紋理
特 徵 值 , 如 均 質 度 (homogeneity) 、 對 比 度 (contrast)、差異度 (dissimilarity)、熵 (entropy) 等 (Definiens, 2007)。
2.1.3 自動化分類
以物件為基礎的分類方式是以影像區塊作為 分類之基本單元,每個影像區塊經過特徵萃取後,
皆擁有各自的屬性及特徵。利用這些特徵配合分類
條件與門檻,再搭配監督 (supervised) 或非監督 (unsupervised) 分類模式,即可進行地物分類。近 年來有學者嘗試建立標準化的物件導向自動化分 類 模 式 (Gamanya et al.,2007) , 其 利 用 決 策 樹
(decision tree)分類方式,設定若干決策規則 (rule set) 及決策值 (decision value) 之後,即可自動進 行影像分類,如圖 3。
(a) 原始影像 (b) 像元式分類 (c) 物件式影像分類 圖 1 像元式與物件式影像分類比較
圖 2 區域切割與合併 (Blaschke, 2004)
圖 3 標準化物件導向地物分類模式(Gamanya et al.,2007)
2.2 點雲分割
點雲分割是將點雲依應用需求自動分群為較 小的資料集,如圖 4。其中,Douillard et al. (2011) 的研究中提到,點雲分割前若先分出地面點與非地 面點,對後續分割成果有顯著的幫助,因此以下將 介紹現行的地面點萃取與非地面點分割方式。
2.2.1 地面點萃取
地面點 (ground points) 為光達資料中用於描 述地面的點位,如何有效地從光達資料中萃取出該 些點位,與數值高程模型 (digital elevation model, DEM) 的建置方式有高度關聯性。鑒於空載光達具 有快速、經濟、高密度與高精度等優點,現行的 DEM 大多採用空載光達點雲的資料製作。邵怡誠 及陳良健 (2006) 曾將目前各家學者已發展出的 各類過濾演算法整理分析,其中基於各家對地面、
地物的假設不同,演算法的適用性隨場景而異。就 操作觀念而言,以面為基礎 (surface-based) 大多 假 設 地 面 具 有 高 程 連 續 特 性 ; 以 區 塊 為 基 礎 (region-based) 則假設地物為區域較高,或是地面 為局部較低;以斜率為基礎 (slope-based) 則假設 地物點與鄰近地面點相較之下有較大的斜率。
2.2.2 非地面點分割
非地面點 (non-ground point) 為描述地物資 訊的重要點位,因此在空間資訊中扮演極為重要的
角色。如何依應用之需求建立點雲正確的從屬關係,
進而分離或分割點雲,為近年來電腦視覺領域中相 當熱門的課題。一般而言,點雲分割隨驅動方式的 不同,可分為模型導向 (model driven) 與資料導向 (data driven)。模型導向大多利用參數描述幾何元 件,再以不同統計方式萃取符合條件的點雲,進而 達 到 點 雲 分 割 之 效 益 , 例 如 霍 夫 轉 換 (hough transform) (Hough, 1962) 與 隨 機 樣 本 一 致 (random sample consensus, RANSAC) (Fischler and Bolles, 1981) 等,即是針對特定模型建立強鈍的擬 合機制。另一方面,以資料導向方式實行點雲分割,
在電腦視覺領域中已行之多年,並且常架構於「圖 叢聚」 (graph clustering) 的概念下討論。叢聚是 指找出資料中特有的模式 (pattern),將類似群集 (group) 的資料點聚合為叢集 (cluster) 方法,如圖 5 所 示 , 可 利 用 資 料 點 間 之 歐 幾 里 德 距 離 (euclidean distance) 或光譜距離 (spectral distance) 作為聚合與否之依據。而圖叢聚則指在考量圖形邊 界結構 (edge structure of the graph) 之情況下,圖 形的最大集結 (maximal clique) 成果。亦即在此考 量下,叢集本身應具有與內部點集連結性高、與外 部點集連結性低的特性 (Schaeffer, 2007)。相關演 算法如 Normalized Cuts 與 Min Cuts 等,皆可有效 解決早期視覺 (early vision) 問題。
(a) 目標物 (b) 點雲資料 (c) 點雲分割 (d) 獨立物件 圖 4 點雲分割
(a) 依距離特性
(b) 依光譜特性 圖 5 利用不同模式叢集資料點
3. 研究方法
本研究嘗試以物件為基礎對光達點雲進行地 物分類,因此在分類程序及架構的安排上,主要承 襲 OBIA 分類模式。研究流程如圖 6 所示,主要 分為三部分:(1) 點雲分割、(2) 物件特徵萃取,
與(3) 自動化分類,各部分細項將分別介紹。
3.1 點雲分割
點雲分割依應用需求及處理對象的不同,而有 不一樣的分割策略。以下介紹本研究採用之地面點 萃取與非地面點分割方式。
圖 6 研究流程
3.1.1 地面點萃取
本 研 究 在 此 採 用 現 有 之 點 雲 處 理 工 具
「LASTOOL」 中之 lasground 功能萃取地 面點 (Isenburg, 2012) , 其 主 要 以 三 角 網 精 化 (TIN refinement) 概念萃取地面點,藉調變四參數達到 好的萃取成效,包含:(1) 起始種子點 (initial seed point) 的取樣間距 (Step)、(2) 凸刺 (Spike) 量級、
(3) 標準差 (Stddev) 與(4) 偏移量 (Offset)。首先,
以 Step 大小的網格約化點雲資料,並假設網格內 最 低 的 點 位 為 地 面 點 , 預 估 初 始 地 面 (initial ground estimate)。接續在考量最大中誤差 (maximal standard deviation) 不超過 Stddev 情況下,以迭代 方式逐步找尋新的地面點位,並移除高/低於初始 地面 Spike 距離的點,重複此步驟直到完成最精 緻的地面預估 (finest ground estimate)。最後將高於 地面預估 Offset 距離的點位一併歸入地面點,即 完成地面點萃取,如圖 7。
3.1.2 非地面點分割
完成地面點萃取後,即可利用地面點作為非地 面點雲之分離器 (separator) (Douillard et al., 2011)。
以下針對非地面點分割部份,分別說明資料導向之 叢聚分割法與模型導向之 RANSAC 分割法。
3.1.2.1 叢聚分割法
光達系統使用大量密佈於物體表面之點坐標 描述地物,因而具有豐富的幾何資訊。鑒於物體本 身具有凝聚 (coherence) 特性,點雲分割時可利用 近鄰點關聯性高、遠鄰點關聯性低的概念,計算相 鄰點位間之歐幾里德距離,並將小於叢聚門檻 (clustering tolerance, CT) 的點位相互聚集為同一 單元。在完成點雲叢聚的同時,達到物件分割的效 益,如圖 8。
有鑑於 CT 值在定義上與點位間歐氏距離有 關,為因應各式點雲資料於載具、掃描條件的不同,
本研究將利用點雲密度反算合理的 CT 值。在假設 點雲資料取樣間距固定的情況下,可先計算點雲密 度 Density,再以式(1)求取單位距離內擁有的點數 Nu,最後利用式(2)即可求得任兩點間距作為 CT。
以 16 pt/m2點雲密度例,利用式(1)可知,一公尺 內平均有 4 個點位,亦即 4-1=3 個點間距,則利 用式(2)可得 CT 值為 1/3 公尺。
(a) 以 Step 為取樣間距 (b) 初始地面點 (俯視 TIN)
(c) 初始地面點 (側視 TIN) (d) 地面預估成果 (側視 TIN ) 圖 7 地面點萃取示意
(a) 三維點雲 (b) 叢聚分析 (c) 叢聚完成 圖 8 三維叢聚分割示意
N
u Density
(1)1 : (Nu -1)= CT : 1
CT = 1 / (Nu - 1) (2) 叢聚分割法主要以資料間之距離為依據,因此 屬一種資料導向之分割方式。其中,由於資料導向 分割方式較能適應物體本身的幾何變化,對於複雜 或無先驗資訊的場景而言,可先使用此方式取得初 步點雲物件,後續再以特定的分割方式,例如 RANSAC 分割,針對物件中感興趣的部份進行細 部分割。3.1.2.2 RANSAC 分割
RANSAC (Schnabel et al., 2007) 為近年來模 型導向分割中常被採用的方式,其利用隨機搜尋最 小點雲群集的方式,加速運算效能,並以得分函式 (score function) 與影像處理方式,萃取可以用模型 描述的點雲資料,例如平面 (plane)、圓球 (sphere)、
圓柱 (cylinder)、圓錐 (cone) 與甜甜圈形 (torus) 等,具有強鈍、高效率之特性。因此,使用此法於 複雜場景,可有效萃取點雲中隱含的幾何構型,並 在完成萃取的同時,分割出可參數化與不可參數化 之點雲,如圖 9。
3.2 物件特徵萃取
完成點雲分割後,後續處理光達資料即是以三 維物件為單元做分析。為瞭解物件所擁有的特性,
首先須進行物件特徵萃取。有鑑於目前較少有研究 提出三維空間特徵之計算方式,本研究嘗試自行設 計各式特徵,作為後續三維物件分類上可用的指標。
在此將特徵做簡易的分類,分別為幾何特徵與統計
特徵,如圖 10,以下僅簡述其中數個指標。
3.2.1 幾何特徵
3.2.1.1 Model Ratio
Model Ratio 是利用 RANSAC 對點雲物件進行 模型萃取,再以式(3)計算而得,其中 Ni代表幾何 元件之總點數,Ntotal則為點雲物件總點數。Model Ratio 值域為 0 至 1,量值愈高表示物件愈能以模 型描述,屬規則物機率愈高;反之,量值愈小表示 物件愈無法以參數描述,屬不規則物之機率愈高。
其中,以式(4)可求得各種幾何元件在物件中佔有 的比例,包含 Plane Ratio (平面比)、Cylinder Ratio (圓柱比)、Sphere Ratio (球面比) 及 Cone Ratio (錐 比) 等特徵。
{ , , , }
i total
Model Ratio N N
i plane cylinder sphere cone
(3)
{ , , , }
i total
i Ratio N N
i plane cylinder sphere cone
(4)
3.2.1.2 Principal Curvature
Principal Curvature (PC) 的計算方式是以帶有 法向量之點位為基礎,先利用任一點 p 之法向量np 代表的平面作為切面 (tangent plane),再以 K 鄰近 法搜尋鄰近點位ki,並將其各自的法向量
ki
p 投影 至切平面上,如圖 11。其中,點位法向量採 Rusu (2010) 提出的方式,藉由最小二乘法擬合鄰近點 位所形成的平面方程式而得。最後計算投影向量群
所形成的協變方矩陣,進行特徵值分解求得最大特 徵值即為 PC1 (主曲率),第二大特徵值即為 PC2 (最小曲率),最後分別計算 PC1 與 PC2 之平均值
與標準差,即可求得 Mean PC1 (平均最大曲率)、
Mean PC2 (平均最小曲率)、Std PC1 (最大曲率標準 差)、Std PC2 (最小曲率標準差) 等四種特徵。
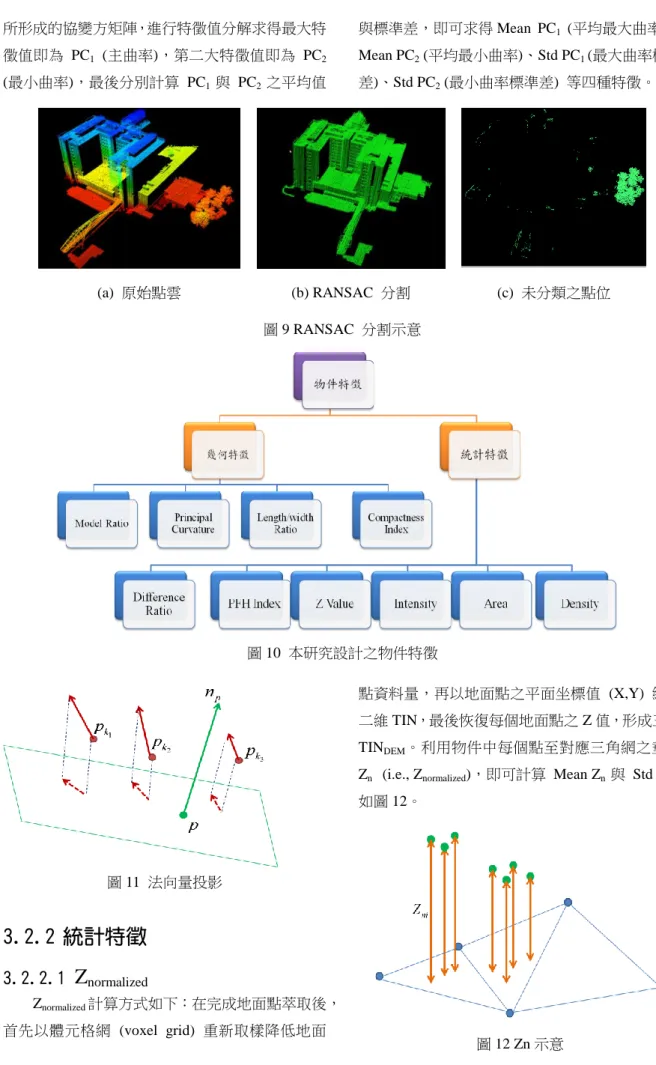
(a) 原始點雲 (b) RANSAC 分割 (c) 未分類之點位 圖 9 RANSAC 分割示意
圖 10 本研究設計之物件特徵
圖 11 法向量投影
3.2.2 統計特徵
3.2.2.1 Z
normalizedZnormalized計算方式如下:在完成地面點萃取後,
首先以體元格網 (voxel grid) 重新取樣降低地面
點資料量,再以地面點之平面坐標值 (X,Y) 組成 二維 TIN,最後恢復每個地面點之 Z 值,形成三維 TINDEM。利用物件中每個點至對應三角網之垂距 Zn (i.e., Znormalized),即可計算 Mean Zn 與 Std Zn, 如圖 12。
圖 12 Zn 示意
3.2.2.2 Area
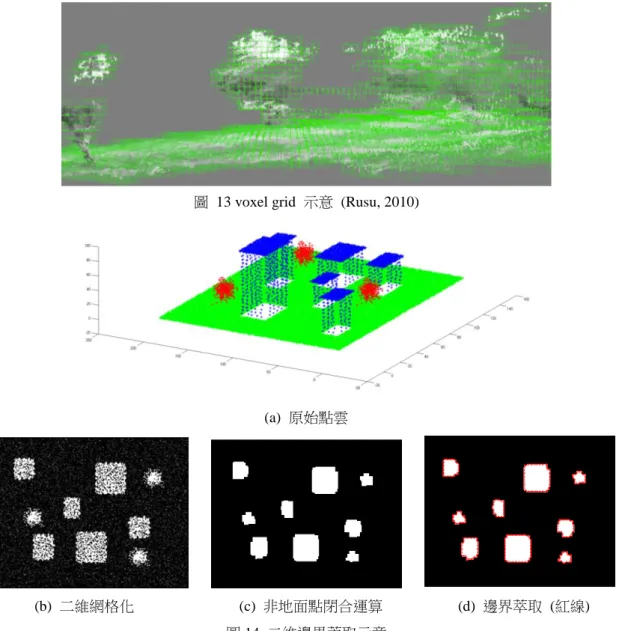
Area 計 算 方 式 如 下 : 首 先 利 用 體 元 格 網 (voxel grid) 約化點雲資料量,如圖 13。接續將非 地面點雲物件投影至二維網格中,再將網格依有/
無點的規則二元化 (binary)。最後以型態學閉合 (closing) 搭配 Suzuki (1985)提出的輪廓提取演算 法,萃取二維物件邊界,如圖 14。獲取點雲物件 之二維邊界後,計算邊界內網格數,將其乘以格網 解析度即可獲得 Area。
3.3 點雲自動化分類
現行之物件導向自動化分類模式主要以決策 樹配合若干規則與門檻達成分類。本研究亦希望能 採用此概念設計決策規則,進行點雲自動化分類。
決策樹分類中,規則與門檻之建立,多仰賴人為對 場景的先驗知識,因此特徵的適用性會依分類目標 而異,常需經由人為分析,選用合適的特徵及門檻。
以圖 15 兩物種分類為例,首先可以人為方式選取 該些類別的訓練樣本進行物件特徵萃取,並計算特 徵統計值,如表 1。接續找出不同物種間,量值差 異顯著且敏感度低的特徵作為分類依據。其中,量 值與敏感度的行為會分別顯示於特徵平均值與標 準差上,因此可繪製其高斯分佈曲線,藉由曲線之 分佈行為,初步瞭解特定特徵於分類目標之辨別力。
如圖 16 所示,A 特徵相較於 B 特徵而言,有較高 的機會能辨別結構物與樹木。最後利用選出的物件 特徵,配合適當的決策規則與門檻,即可進行自動 化分類,如圖 17。
圖 13 voxel grid 示意 (Rusu, 2010)
(a) 原始點雲
(b) 二維網格化 (c) 非地面點閉合運算 (d) 邊界萃取 (紅線) 圖 14 二維邊界萃取示意
(a) 建物點雲 (b) 樹叢點雲 圖 15 不同物種之點雲物件
表 1 特徵計算成果示意 Structure Tree Mean Stddev Mean Stddev Feature A 0.845 0.080 0.010 0.080 Feature B 0.850 0.125 0.731 0.130 Feature C 0.006 0.008 0.531 0.025
(a) 量值差異大且敏感度低 (b) 量值差異小且敏感度高 圖 16 不同類別之物件特徵響應曲線
圖 17 物件自動化分類
4. 實驗成果與分析
有鑑於以物件為基礎的分類在規則設計上大 多隨場景而異,本研究將採案例研究 (case study) 的方式進行實驗測試,說明在不同場景、不同分類 目標下,如何依分類需求,制定合理的規則,以物 件為基礎對光達資料進行分類。基於過去的研究大 多僅針對空載光達資料進行地物分類,本研究為測 試此架構於各式光達資料之適用性,分別採用實際 空載光達資料及實際地面光達進行實驗分析。並將 實驗成果與 LASTOOL 中以點為基礎 (point-based) 之分類模式進行比較分析。
本研究發展之作業平台主要架構於 C++ 程 式語言,開發環境為 Microsoft Visual Studio 2010,
並引入 Point Cloud Library (http://pointclouds.org/) 與 Open CV (http://opencv.org/) 等公開程式庫進行 介面展示與數值處理。
4.1 實際空載光達資料
本部份採國立成功大學光復校區之光達資料 進行測試,由 RIEGL-Q680i 全波形 (full-waveform) 光達掃描而成,本次航高約 800 公尺,點雲密度約 7 pt/m2。研究區域如圖 18 所示,由航照影像可知,
該區地物主要有結構物 (structure)、樹 (tree) 與車 輛 (car)。其中,由於本次掃描之點雲密度大致上 能提供該三類別足夠的點數,本實驗將選用該三類 別作為分類目標,設計分類程序。
以下首先介紹點雲分割成果,接續分析物件特 徵選用方式,最後設計分類規則並展示實驗成果,
並評估分類品質、比較 OBPCA 及 LASTOOL 分類 成效。
4.1.1 點雲分割
在點雲分割上,首先利用 LASTOOL 萃取地 面點,如圖 19 (a)。接續利用實驗區點雲密度計算 CT 值,進行三維叢聚分割,如圖 19 (b),其中不 同顏色代表不同物件。由點雲分割成果來看,以點 密度推得之 CT 值在大部分區域皆能有效區別不
同類別之點雲,使大部分的結構物、樹木與車輛皆 能分割為獨立物件。然而,由於叢聚分割法是基於 距離所發展的方式,故在不同類別過於靠近之區域,
在初步物件分割中未能正確分離,因此在後續分類 上,需將該些混合物件 (Mixture) 再行細分。
(a) 航照影像 (b) 光達資料 (intense image)
圖 18 空載光達實驗區域
4.1.2 物件特徵分析
完成物件初步分割後,首先需萃取物件特徵,
以瞭解物件擁有的特性。為分析不同物件特徵於不 同地物上的顯著性,以作為後續決策規則設計依據,
本研究首先由叢聚分割成果中,人工篩選結構物、
樹木、車輛與混合物等 4 類別各 10 個樣本物件,
作為訓練資料 (training data),如圖 20,並進行物 件特徵萃取,計算各類別於各特徵之平均值與標準 差。利用研究方法中提及的物件特徵響應曲線分析,
可初步判定 Model Ratio、Mean Zn、Mean PC1、
Mean Intensity、Std Z 及 Area 等特徵在此場景下,
對結構物、樹木、車輛與混合物有較顯著的反應,
如圖 21 所示,以下將分別說明該些特徵於各類別 反應義涵。
由圖 21 (a) 可知,Model Ratio 能明確反應出 結構物、混合物、樹木及車輛之可參數化比例,因 此對於該四類別而言,此特徵在辨識度上扮演相當 重要的角色。當 Model Ratio 高於 0.75 時,可判釋 出大部分結構物;當 Model Ratio 低於 0.02 時,可 判釋出大部分樹木與車輛;當 Model Ratio 介於
0.02 至 0.75 時,則可判釋出大多數混合物。由圖 21(b)、(c)、(d) 可知,Mean Zn、Std Z、Area 能有 效反應出物體實際高度、高度變化量與投影至地面 之面積。其中,車輛之 Mean Zn 大都低於 1.5 公尺、
Std Z 低於 0.5 公尺且 Area 小於 10 平方公尺。因 此相較於結構物、樹木與混合物而言,同時使用該 些特徵能有效輔助車輛判釋。此外,對於樹木類別 而言,Mean Zn普遍高於 3 公尺,因此利用該特徵 將有利於樹木判釋。由圖 21(e) 可知,物體幾何變 化劇烈程度會直接反應在物件整體曲率上,因此對 於結構物、車輛等較規則、平滑的物體而言,Mean
PC1在區別樹木與結構物 (或樹木與車輛) 上,具 有較高的能力。當 Mean PC1 高於 5.0 時可辨識出 大部分之樹木;當 Mean PC1 低於 5.0 時可辨識出 大部分之結構物與車輛。由圖 21(f) 可知,受結構 物與樹木表面材質不同的影響,感測器取得的點雲 反射強度有較顯著的差異,因此 Mean Intensity 對 於輔助此二類別的辨識上,有較高的助益。當 Mean Intensity 低於 50 時,可判釋出大部分樹木;當 Mean Intensity 高於 50 時,可判釋出大部分結構 物。
3
(a) 地面點(紅)/ 非地面點(藍) (b) 非地面點分割 Step:25.0 m Spike:1.0 m
Stddev:0.015m Offset:0.05 m CT:0.6 m 圖 19 空載光達點雲分割成果
(a) 實驗區航照影像 (b) 俯視圖
圖 20 空載光達訓練資料 (橘:結構物;灰黑:樹;綠:車輛;淺藍:混合物)
(a) Model Ratio (b) Mean Zn (unit:m)
(c) Std Z (unit:m) (d) Area (unit:m2)
(e) Mean PC1 (unit:1/m) (f) Mean Intensity 圖 21 物件特徵響應曲線
(紅:結構物;桃紅:車輛;綠:樹木;藍:混合物)
4.1.3 分類規則設計與分類成果
以下利用物件特徵分析成果設計分類規則。由 於 Model Ratio 在結構物、混合物、樹木與車輛上 具有高度分辨能力,首先可利用該特徵分類點雲物 件為(1) 結構物、(2) 混合物與(3) 無模型 (No Model) 三類別。接續利用樹木於 Mean Intensity 與 Mean Zn反應特性分出 No Model 中的樹;以及 使用 Mean Zn、 Std Z、Area 與 Mean PC1分類車
輛。最後將不符合決策條件的物件,歸為未分類 (Unclassified)。然而,在結構物的部分,受實驗區 樹木緊鄰結構物影響,叢聚分割法無法以凝聚特性 分割不同地物點雲,造成 Model Ratio 特徵值反應 介於結構物與非結構物之間,使多數結構物、樹木 過於鄰近的區域,被分類為混合物。有鑑於此,本 研究採用模型導向之 RANSAC 分割法進行二次 分割。其中受限於 RANSAC 僅考量如何萃取出點 雲資料中可模型化的點位,未考慮點位間個體上的
差異,本研究首先對混合物件採取 RANSAC 分割,
以區別規則 (Regular) /不規則 (Irregular) 點雲,再 分別對規則/不規則點群以三維叢聚分割法叢聚出 獨立物件,最後將分割後之物件同樣進行物件特徵 萃取與分類。基於上述方式,可設計分類規則如圖 22。
分類成果如圖 23,由分類成果來看,結構物、
樹木與車輛之分類結果與人為認知的一致性相當 高。此外,以本研究之二次分割程序可有效處理複
合構型的物件,並藉由 RANSAC 重新分割點雲物 件,達到合理的分類。同時,比對光達點雲分類成 果與航照影像後可以發現,過去容易受光譜資訊混 淆而分類錯誤的地物,在本研究以物件架構搭配三 維幾何與統計特性分類情況下,能有效改善分類成 果。而在過去影像無法描述的三維資訊上,例如受 大量樹叢遮蔽的車輛、小型結構等,以本研究之三 維架構進行分類亦可有效將其分出,提供額外的空 間資訊,如圖 23 (f) 所示。
圖 22 空載光達分類規則
(a) 實驗區航照影像 (b) 俯視圖 (未經二次分割) (c) 俯視圖 (經二次分割)
(d) 側視圖 (經二次分割) (e) 側視圖 (經二次分割) (f) 剖視圖 (經二次分割) 圖 23 空載光達分類成果 (紅:結構物;綠:樹;黃:車輛;淺藍:混合物;卡其:地面點;白:未分類)
4.1.4 分類品質評估
為瞭解 OBPCA 於本實驗區之分類品質,本 研究在此以人工方式,將實驗區內人為可辨識的所 有結構物、樹與車輛分出,作為分類品質評估之地 真 (ground truth) 依據,如圖 24。利用上述地真資 料計算分類成果之誤差矩陣 (Error Matrix) 如表 2,
並以該表計算各式分類精度指標,如表 3。由分類 精度指標可知,以物件作為點雲資料之描述單元,
對於分類有良好的助益。其中可以發現,以本研究 OBPCA 架構進行分類,在誤授、漏授的比例皆低,
顯示由點群所構成的空間資訊,能提供較以往分類 模式更豐富、多元且穩健的資訊作為分類依據。然 而,在車輛類別的分類成效上,受點雲密度與車輛 投影面積的影響,物件中的點雲數量通常不高,因 而不易完整描述該類別所擁有的空間特性,造成分 類錯誤率較高的情況。此外,由整體分類精度及 Kappa 值可知,以物件為基礎的分類不僅能提升分 類成果與人為認知的一致性,在分類品質上亦有相 當良好的表現。
4.1.5 與 LASTOOL 分類成果比較與分析
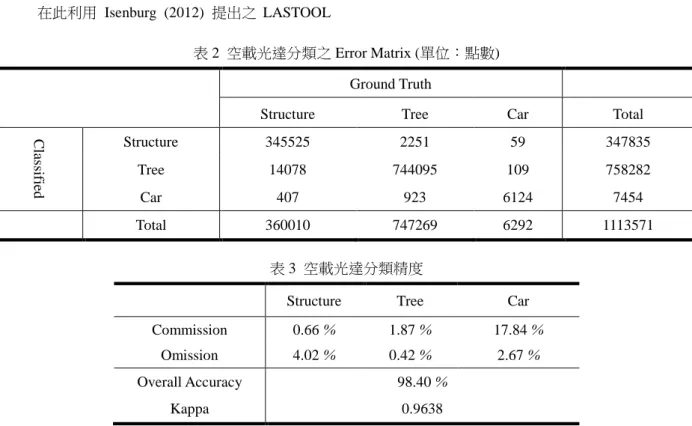
在此利用 Isenburg (2012) 提出之 LASTOOL
進行比較分析,其主要以 point-based 的方式實行 分類,而程式內建之可分類類別僅包含結構物與樹 木,分類成果比較如圖 25。由分類成果可以發現,
LASTOOL 在空載光達點雲分類成效上亦有不錯 的表現。然而由於分類時採逐點判釋方式進行,未 考量鄰近點位之歸屬性,造成結構物邊界普遍存有 零散未分類點位 (類似傳統像元式分類中之椒鹽 效應)。此外, LASTOOL 亦無法辨識遮蔽區下的 結構物,如圖 25 (f)。
在此分別計算 OBPCA 與 LASTOOL 分類成果 之 Error Matrix 與分類精度指標,其中,為了於同 一基準比較分類成效,僅比較結構物與樹木之分類 成果,如表 4 及表 5 所示。由分類精度指標來看,
OBPCA 分 類 成 效 普 遍 有 較 佳 的 表 現 。 其 中 由 LASTOOL 分類成果可知,以 point-based 方式進行 點雲分類時,由於未考量點群所具有的空間分佈特 性,容易造成誤授、漏授比例偏高,反觀 OBPCA 則能藉由空間特徵的輔助,有效抑制誤授及漏授的 比例。而由整體分類精度與 Kappa 值亦顯示,以 OBPCA 架構進行點雲分類,不僅能提升分類成果 與人為認知的一致性,在分類品質上亦能有優異的 表現。
表 2 空載光達分類之 Error Matrix (單位:點數) Ground Truth
Structure Tree Car Total
Classified
Structure 345525 2251 59 347835
Tree 14078 744095 109 758282
Car 407 923 6124 7454
Total 360010 747269 6292 1113571
表 3 空載光達分類精度
Structure Tree Car Commission 0.66 % 1.87 % 17.84 %
Omission 4.02 % 0.42 % 2.67 % Overall Accuracy 98.40 %
Kappa 0.9638
(a) 實驗區航照影像 (b) 俯視圖
(c) 側視圖
(d) 側視圖 圖 24 空載光達地真資料 (灰:結構物綠:樹橘:車輛)
(a) OBPCA 分類成果(俯視圖) (b) LASTOOL 分類成果(俯視圖)
(c) OBPCA 分類成果(側視圖) (d) LASTOOL 分類成果(側視圖)
(e) OBPCA 分類成果(剖視圖) (f) LASTOOL 分類成果(剖視圖) 圖 25 OBPCA 與 LASTOOL 於空載光達分類成果比較 (紅:結構物;綠:樹木;白:未分類)
4.2 實際地面光達資料
本部份採國立台灣大學校本部大門警衛室之 地面光達資料進行測試,點雲密度約 5000 pt/m2。 研究區域如圖 26 所示,該區主要由結構物與植被 等地物構成。其中,結構物包含建物與小型結構 (例如:告示牌、售票機與交通錐等);植被則包含 樹、樹叢、樹幹等。鑒於於地面光達提供較多地物 細節資訊,本實驗選用建物 (building)、小型結構 物 (small structure)、樹 (tree)、樹叢 (grove)、樹 幹 (trunk) 作為分類標的,設計分類程序。有鑑於 分析程序與空載光達測試方式大致相同,以下僅簡 述各階段處理成果。
4.2.1 點雲分割
在此同樣利用 LASTOOL 進行地面/非地面點 分類,再以三維叢聚分割法進行物件初步分割,成 果如圖 27 由點雲分割成果來看,以點密度推得之 CT 值能將不鄰近的物件有效區隔。然而,在部份 區域因距離過於鄰近,仍出現類別混合情況,因此
後續需再行細分。
4.2.2 分類規則設計與分類成果
在此同樣以人工方式篩選各類別樣本物件,訓 練物件特徵值,選定 Model Ratio、Cylinder Ratio、
Mean Zn、Std Z、Area 作為分類用之依序。首先可 利用 Model Ratio 於結構物、混合物與植被類別的 高分辨力初步分類點雲物件為(1) 結構物、(2) 混 合物與(3) 無模型三類別。其中,當混合物件於 Cylinder Ratio、Std Z 及 Area 符合門檻要求時,
即分類給樹幹類別。接續針對結構物的部份,設一 面積門檻即可分出建物與小型結構物;針對無模型 的部分,設定 Mean Zn 門檻即可分類出本場景之 樹與樹叢。最後將不符合決策條件的物件,歸為未 分類。然而因場景複雜度高,且此區地物大多過於 鄰近,許多物件為混合類別,因此本研究在此同樣 採模型導向之 RANSAC 分割法針對混合物件進 行再分割。基於上述方式,可設計分類規則如圖 28。
表 4 OBPCA 與 LASTOOL 之空載光達分類 Error Matrix (單位:點數)
OBPCA / LASTOOL
Ground Truth
Structure Tree Total
Classified
Structure 345525 / 97144 2251 / 80 347776 / 97224
Tree 14078 / 27742 744095 / 305546 758173 / 333288 Total 359603 / 124886 746346 / 305626 1105949 / 430512
表 5 OBPCA 與 LASTOOL 之空載光達分類精度 OBPCA / LASTOOL Structure Tree
Commission 0.65 % / 0.08 % 1.86 % / 8.32 % Omission 3.91 % / 22.21 % 0.30 % / 0.03%
Overall Accuracy 98.52 % / 93.54 % Kappa 0.9660 / 0.8322
(a) 近景影像 (b) 光達資料(intense image) 圖 26 地面光達實驗區域
(a) 地面/非地面點分類 (藍:地面點 紅:非地面點)
Step:5.0 m Spike:0.3 m Stddev:0.05 m Offset:0.02 m
(b) 非地面點分割 CT:0.014 m
圖 27 地面光達點雲分割成果
圖 28 地面光達分類規則
分類成果如圖 29,以本研究之二次分割程序 確實能提升處理複合型物件之可行性,確實將物件 中的細節取出,如盆栽中結構物部份即可與上端樹 叢有效分離。而在植被的分類上,對於樹、樹幹而 言,亦有不錯的分類成效,僅於樹叢的部份受人為 修剪過於規則影響,在二次分割中仍可能從植被中 萃取出模型,造成判釋錯誤,仍分類為混合物的情 況。
4.2.3 分類品質評估
在此同樣以人工方式將實驗區內人為可辨識 的建物、小型結構物、樹、樹叢及樹幹分出,作為 分類品質評估之地真依據,如圖 30。利用上述地 真資料計算分類成果之誤差矩陣如表 6,並以該表 計算各式分類精度指標,如表 7。由整體分類精度 與 Kappa 值可知,整體分類成效雖未達空載光達 點雲分類品質,但在 OBPCA 之分類模式下,已 可藉由點雲的空間特性搭配人為既有的認知,初步 對地面光達點雲達到不錯的分類成效。
4.2.4 與 LASTOOL 分類成果比較與分析
在此同樣利用 LASTOOL 進行比較分析,分類
成 果 比 較 如 圖 31 。 由 分 類 成 果 可 以 發 現 , LASTOOL 用於地面光達點雲容易有分類成效不 佳的情況。原因可能在於 LASTOOL 演算法之假 設條件主要適用於空載光達點雲的掃描特性,因此 將其用於地面光達點雲時,受點位間距與空間分佈 特性大幅改變的影響,演算法內之假設條件與實際 點雲分佈行為不符,造成全區點雲資料幾乎都分類 錯誤的情況。反觀本研究以 OBPCA 架構實行點 雲分類時,主要以物件叢集於三維空間中的分佈行 為為依據,與掃描角度特性相關性較低,因此當點 雲數量與分佈足以描述特定地物之幾何變化時,即 可進行分類。此外,在分類之類別數上,以 OBPCA 進行分類時,可較容易地依人為認知增加或刪減分 類類別。不同於以往針對特定地物發展特定演算法 方式,OBPCA 統一以(1) 分割、(2) 物件特徵計 算與(3) 分類的程序執行點雲分類,僅需藉由調變 (1) 分割參數、(2) 特徵與門檻及(3) 分類規則即可 完成,相較於傳統 point-based 方式,OBPCA 在分 類之自由度上有所提升。有鑑於以 LASTOOL 進 行地面光達點雲分類成效相當不佳,在此不另行比 較 OBPCA 與 LASTOOL 之分類品質。
(a) 側視圖(未經二次分割) (b) 側視圖(未經二次分割) (c) 側視圖(未經二次分割)
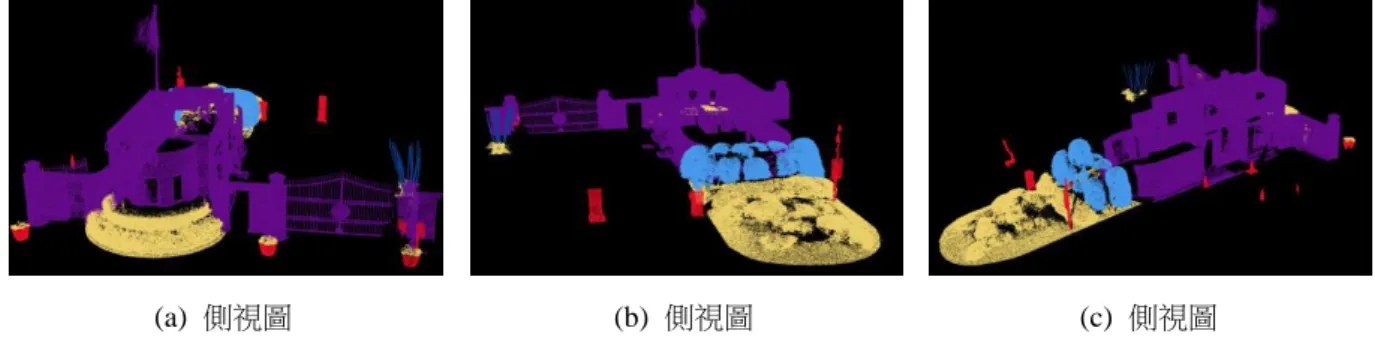
(d) 側視圖(經二次分割) (e) 側視圖(經二次分割) (f) 側視圖(經二次分割) 圖 29 地面光達分類成果
(紅:建物;黃:小型結構;深綠:樹;淺綠:樹叢;橘:樹幹;淺藍:混合物;卡其:地面點)
(a) 側視圖 (b) 側視圖 (c) 側視圖 圖 30 地面光達地真資料 (紫:建物;紅:小型結構;淺藍:樹;黃:樹叢;深藍:樹幹)
表 6 地面光達分類之 Error Matrix (單位:點數) Ground Truth
Building Small Structure Tree Trunk Grove Total
Classified
Building 527341 0 0 0 61954 589295 Small Structure 38292 10716 0 226 819 50053
Tree 3050 119 104287 0 4788 112244
Trunk 0 0 0 4151 86 4237
Grove 1370 540 38211 1142 161016 202279 Total 570053 11375 142498 5519 228663 958108
表 7 地面光達分類精度
Building Small Structure Tree Trunk Grove Commission 10.51 % 78.59 % 7.09 % 2.03 % 20.40 %
Omission 7.49 % 5.79 % 26.82 % 24.79 % 32.07 %
Overall Accuracy 84.28 %
Kappa 0.7221
(a) OBPCA 分類成果 (側視圖) (c) OBPCA 分類成果(側視圖) (e) OBPCA 分類成果(側視圖)
(b) LASTOOL 分類成果(側視圖) (d) LASTOOL 分類成果(側視圖) (f) LASTOOL 分類成果(側視圖) 圖 31 OBPCA 與 LASTOOL 於地面光達分類成果比較
(紅:建物;黃:小型結構;深綠:樹;淺綠:樹叢;橘:樹幹;淺藍:混合物;卡其:地面點;白:未分類)
5. 結論與建議
本研究利用以物件為基礎的影像分析 (OBIA) 架構出發,藉由解析過去以影像為主進行地物分類 之優勢與限制,以及瞭解 OBIA 概念用於影像分 類所提供的效益,進而提出以物件為基礎的光達點 雲分類架構 (OBPCA)。為驗證 OPBCA 於各式光 達資料之適用性,實驗中分別以空載光達與地面光 達資料進行自動化地物分類。由空載光達與地面光 達之分類成果可知,OBPCA 能藉由描述點群具有 的空間特性輔助點位判釋,有效提升分類成果之合 理性。此外,經比較 LASTOOL 之 point-based 分 類成果後亦可發現,OBPCA 不論於光達掃描載台 種 類 、 分 類 類 別 數 與 分 類 程 序 上 , 皆 較 以 往 point-based 分類模式有更高的自由度。
透過本研究可知,以物件為基礎的架構用於光 達點雲的分類上,已可初步提供不錯的分類成效。
然而,從研究中可發現仍有許多可探討與研究之空 間。首先,於整體分類架構上,不論於點雲分割模 式、物件特徵種類,以及自動化分類模式,皆有許 多可改進的部份。在點雲分割上,除了利用點位距 離特性或模型進行點雲分割外,未來期望能進一步 分析不同的點雲分割技巧進行物件分割,例如可嘗 試以局部性曲率變化作為分割與否依據。此外,當 分割出的點雲物件不正確時,物件特徵計算成果無 法提供穩固的分類依據,因此較佳之分類模式將有 助於改善分類成效。在物件特徵上,本次實驗僅列 出 20 餘項特徵進行分析,其中於物件特徵之特性 可知,Model Ratio 適用於區分結構物與非結構物;
Cylinder Ratio 適於找出柱狀物;Mean Zn適於分離 不同高度的地物,例如樹與車輛,或樹與樹叢;
Mean Intensity 則在空載光達資料中扮演植被萃取 的重要角色。由上述可知,未來若能發展出更多有 用於地物判釋之三維物件特徵,對不同地物的分類 上勢必能有所幫助。最後,在自動化分類模式上,
本次研究主要採監督式之決策樹分類法進行分析,
後續若能於物件特徵萃取後,自動統計不同特徵之 分離度,並排序特徵重要性,應有機會達到全自動 化之光達點雲分類。同時,對於光達資料而言,近
年來以影像結合光達進行量測的方式逐漸興起,倘 若後續能融合此二類資料於 OBPCA 之分類架構,
並針對前述各個部分加以改善,未來於遙測分類上 應有機會提供更即時、準確的地物分類。
參考文獻
王偉立 (2008) 光達點雲平面特徵自動化匹配與 航帶平差之研究, 碩士論文, 國立成功大學測 量及空間資訊學系, 台南。
王淼、湯凱佩、曾義星 (2005) 光達資料八分樹結 構化於平面特徵萃取, 航測及遙測學刊, 10 (1) : 59-70。
邵怡誠、陳良健 (2006) 空載光達點雲於 DEM 自 動生產與精度評估--使用 isprs 測試資料為例, 航測及遙測學刊, 11 (1) : 1-12。
徐百輝 (2010) 物件導向分類演算法於衛星影像 分析之應用(YX99-044):國立中央大學前瞻 通訊實驗室九十九年度專案研究計畫。
莊雲翰 (2002) 結合影像區塊及知識庫分類之研 究-以 ikonos 衛星影像為例, 碩士論文, 國立 中央大學土木工程學系, 中壢。
鄭雅文、史天元、蕭國鑫 (2008) 物件導向分類於 高解析度影像自動判釋, 航測及遙測學刊, 13 (4) : 273-284。
羅英哲、曾義星 (2009) 光達點雲資料面特徵重建, 航測及遙測學刊, 14 (3) : 171-184。
賴泓瑞、陳俊元、林昭宏 (2010) 以模型樣版為基 礎之建物三維點雲建模演算法, 航測及遙測 學刊, 15 (2) : 189-199。
Blaschke, T., Burnett, C. and Pekkarinen, A. (2004) Image segmentation methods for object-based analysis and classification. Remote sensing image analysis: Including the spatial domain:211-236.
Carlberg, M., Gao, P., Chen, G. and Zakhor, A. (2009) Classifying urban landscape in aerial LiDAR using 3D shape analysis. In Proceedings of the 16th IEEE international conference on Image processing. Cairo, Egypt: IEEE Press.
Definiens (2007) Developer 7 - User Guide.
Munchen,Germany: Definiens AG.
Douillard, B., Underwood, J., Kuntz, N., Vlaskine,V., Quadros, A., Morton, P. and Frenkel, A. (2011) On the segmentation of 3D LIDAR point clouds.
In 2011 IEEE International Conference on Robotics and Automation (ICRA).
Fischler, M.A., and Bolles, R.C. (1981) Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM 24 (6):381-395.
Gamanya, R., Maeyer, P. De and Dapper, M. De (2007) An automated satellite image classification design using object-oriented segmentation algorithms: A move towards standardization. Expert Systems with Applications 32 (2):616-624.
Hough, P.V.C (1962) Method and means for recognizing complex patterns. US Patent, no.
3069654.
Isenburg, M., 2012. Tools for LiDAR Processing,URL:http://www.cs.unc.edu/~isenbur g
/lastools/ (last date accessed:30 July 2012).
Moussa, A. and El-Sheimy, N. (2010) Automatic classification and 3D modeling of LiDAR data.
In Proceedings of the ISPRS Commission III symposium - PCV 2010, edited by N. Paparoditis, M. Pierrot-Deseilligny, C. Mallet and O.
Tournaire. Saint-Mandé, France.
Oruc, M., Marangoz, A.M. and Buyuksalih, G. (2004) Comparison of pixel-based and object-oriented classification approaches using Landsat-7 ETM spectral bands. In ISPRS 2004 Annual Conference. Istanbul,Turkey.
Rusu, R.B. (2010) Semantic 3D object maps for everyday manipulation in human living environments. KI-Künstliche Intelligenz 24 (4):345-348.
Samadzadegan, F., Bigdeli, B. and Ramzi, P. (2010) Classification of LiDAR data based on multi-class SVM. In The 2010 Canadian Geomatics Conference and Symposium of Commission I, ISPRS. Calgary, Alberta, Canada.
Schaeffer, S. E. (2007) Graph clustering. Computer Science Review 1 (1):27-64.
Schnabel, R., Wahl, R. and Klein, R. (2007) Efficient RANSAC for point-cloud shape detection.
Computer Graphics Forum 26 (2):214-226.
Shapovalov, R., Velizhev, A. and Barinova, O. (2010) Non-associative markov networks for 3D point cloud classification. Photogrammetric Computer Vision and Image Analysis 38 (Part 3A):103-108.
Suzuki, S., 1985. Topological structural analysis of
digitized binary images by border following.
Computer Vision, Graphics, and Image Processing 30 (1):32-46.
1 Master, Department of Civil Engineering, National Taiwan University Received Date: Mar. 14, 2013
2 Assistant Professor, Department of Civil Engineering, National Taiwan University Revised Date: Jul. 21, 2013
3 General Manager LIDAR Technology Co., Ltd. Accepted Date: Aug. 14, 2013
*.
Corresponding Author, Phone: 886-3-6235799, E-mail:liweiwu@geoforce.com.tw
Object-Based Classification for LiDAR Point Cloud
Keng-Fan Lin 1 Pai-Hui Hsu2*
ABSTRACT
Recently, image classification methods have transferred from pixel-based to object-based. Under the consideration of specific spatial features of objects, such as spectral, shape, texture, or the subordinative relations among them, object-based image analysis (OBIA) could improve the efficiency of image classification. In order to raise the capability of automatic recognition of land features from LiDAR data, 2D object-based classification method is extended for 3D point cloud classification of LiDAR data in this study. First, point cloud is segmented to independent 3D objects by various methods. Second, object features designed by this study are calculated. At last, the point clouds are classified automatically according to the object features . This study applies airborne LiDAR and ground-based LiDAR to automatic land feature classification. On the part of airborne LiDAR, structures, trees and cars were chosen to be the targets of classification. The overall accuracy and kappa value ran up to 98.40 % and 0.9638 respectively. On the other hand, on the part of ground-based LiDAR, buildings, small structures, trees, trunks and groves were chosen to be the targets. The overall accuracy and kappa value were 84.28 % and 0.7221 respectively. The results show that utilizing the object-based concept to classify LiDAR point cloud can give assistance to point cloud recognition by means of depicting the spatial characters of these objects. The classification results then, therefore, improve not only the completeness, but also the quality.