Genetic Algorithm-Based Fuzzy Pulse-Pump Controller for Phase/Frequency- Locked Servomechanism
G. C. Hsieh, H. M. Lee, L. R. Chen, and Y. J. Penth
Department of Electronic Engineering National Taiwan University of Science and Technology
Taipei, Taiwan 106, R. 0. C.
Abstract - A fuzzy-clustering-based genetic algorithm (FC-GA) is presented to build a genetic algorithm- based fuzzy pulse-pump controller (GA-FPPC) for achieving fuzzy control-based phaselfrequency-locked servomechanism (FC-PFLS). A weighted integral absolute error (WIAE) is presented as the objective function of PC-GA for optimizing the locking behavior of the genetic algorithm-based FC-PFLS (GFC-PFLS).
A mixed elitist anld fuzzy clustering selection strategy is proposed to achieve high diversity of the FC-GA. A tuning strategy by FC-GA can minimize the overshoot and fast the locking performance of the GFC-PFLS. A design example of two-dimensional X-Y mode GFC- PFLS is realized. Simulation and experiment are conducted to assess the system performance, which is close to the theoretical prediction.
I. INTRODUCTION
Phase-locked servo system (PLS) was first proposed in motor servo control since 1970's [l]. The digital approach for PLS was first presented in 1987 [2]. Since then, lots of digital-pump controllers were presented in succession to reduce the position acquisition time in PLS [3-51. Lately, an all-digital contmller for PLS was developed to increase the accuracy of position lock 161. In order to raise the acquisition time in locking process, the fuzzy logic controller was provided for the drives of the PLS [7]. To raise the performance of the phase/frequency-locked servo system (PFLS), a fuzzy pulse pump controller (FPPC) was proposed later soon [SI. The FPPC can provide low overshoot, fast locking response, and short acquisition time for position lock. ]However, it still exists a problem to get optimal parameters with the mentioned process for acquiring locking behavior of the FPPC.
In recent years, some self-leaming or self-tuning approaches for constructing a fuzzy logic controller (FLC) by neural network (NN) were proposed [lo-121. These approaches are useful to get suitable rules and membership functions for FLC. However, the NN has an inherent imperfection that often converges a local optimal value. By the way, the genetic algorithm (GA) is widely used as a search method to resolve the optimal problems because it is a kind of search techniques that can simulate the process of heredity of genes to generate new offspring at each generation [13,14]. GA can easily optimize the problems without detail mathematical approach. Besides, GA is also effective at performing global search. For example, facility layout designs prjoblem, flow-shop sequencing problem, machine scheduling program and transportation problem
are effectively resolved by GA [13]. In the industrial region, many problems can be regard as an optimal problem, could be resolved by GA [14]. GA is then effective and convenient for constructing the FLC due to lots of parameters could be tuned in parallel [15-171.
However, two challenging problems may occur when GA is used to optimize the FPPC, one is how to reduce the convergence time, the other is to find the best objective function. The objective function of GA is used to evaluate the status of each chromosome as a measure to the chromosome's performance.
In this paper, we propose a fuzzy-clustering-based genetic algorithm (FC-GA) to reduce the convergence time of GA and to converge the chromosome at a near-optimal value. Additionally, a weighted integral absolute error (WIAE) is proposed as an objective function for estimating the performance index of the genetic algorithm-based FC- PFLS (GFC-PFLS). A design example with a prototype of the two-dimensional GFC-PFLS is conducted to assess the system performance. The simulation and experiment of the GFC-PFLS with the FC-GA and WIAE are conducted and compared with those of the FC-PFLS with different GAS.
11. SYSTEM DESCRIPTION
x
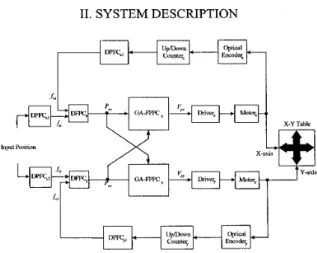
Y-axisFig. 1 The block diagram of the two-dimensional GFC-PFLS.
A two-dimensional GFC-PFLS is configured in Fig. 1, in which an X-Y table is formed by two DC motors and servoed by two sub-phase-locked loops. An optical encoder and an upldown counter are mounted on the shaft of each motor to execute the position feedback. A discrete position/frequency converter (DPFC) is used to convert the servo position into a series of discrete frequencies so as to reduce the conversion error. The input position commands
and the feedback position are represented by frequencies,
fix, fox and fay, respectively. The discrete frequency/pulse comparator (DFPC) is used to accurately calculate the frequency error (fex ,fey) and converts it into a set of position-error pulse numbers @ex , pey ) [6].
The GA-FPPC is designed to provide a near-optimal pump voltages ( Vpx, Vpy) for the motor drives according to the instantly detected position-error pulse numbers (pa ,
p e p ) . The block diagram of the one-dimensional GA- FPPC, of the presented GFC-PFLS is shown in Fig. 2. The GA-FPPC consists of an FLC, an FC-GA, a slope identifier (SI) and a digital pump controller (DPC). The FLC as shown in the dotted block of Fig. 2 is composed of a fuzzifier, a rule library, an inference engine, and a defuzzifier. The fuzzy inference rules and membership functions of the FLC are designed to be tuned by FC-GA.
The fuzzifier is used to transfer the input crisp values, i.e., position-error pulse number pex and its time change Ap, , into fuzzy variables for inference engine. The inference engine then infers the input fuzzy variables with the rule library and provides a suitable fuzzy value for the defuzzifier. Finally, a digital-coded value (output crisp value) si then generates from the defuzzifier. A proper pump slope from SI is then determined according to the value s f , the detectedpex andpw Once the pump slope is determined from SI,, a proper digital-code S, is then sent to DPC, and converted into an analog pump voltage Vpx as the X motor drives. The X's and Y's motors can then accurately move to any position target with proper pump slope S,.
...
Fuzzy-Clustering-based Genetic Algorithm
Fuzzy Pulse Pump Controller, FPPC, ...
:. ...
: Fuzzy -Logic Controller, FLC, Rui ibra
description, NB is negative big, NS is negative small, ZO is zero, PS is positive small, and PB is positive big. In order to describe the fuzzy servo, we define the linguistic terms NS, 20, and PS by Gaussian functions, and the NB and PB by Sigmode functions.
In (3), two parameters and % are the variance and the center position of linguistic terms. But for the Sigmode function in (4), D, and 4 are the decreasing rate with direction and the center position of linguistic terms. All of membership functions of the FPPC can be determined by properly selecting and m values.
A fuzzy inference rule table is built in Table l a by intuitive experiment of the FC-PFLS with the servo criteria of making p e -0 and -0 [9]. The initial membership functions are described in Fig. 3.
Table. l a The fuzzy inference rule table obtained by empiricism.
(a)
Table. 1 b The fuzzy inference rule table ready to be tuned.
Fig. 2 The block diagram of the GA-FPPC, for one-dimensional GFC- PFLS.
111. BUILDING GA TO OPTIMIZE FPPC In Fig. 2, the two inputs of the FPPC, P, and Ape, are respectively defined as
where DFPC( , ) is a converter and comparator, which compares the input fi-equencyfi with the output one f a and converts its difference into a position-error pulse number P,. The FPPC can operate after determining its membership functions and fuzzy inference rules. In this paper, the membership functions are described by the linguistic terms NB, NS, ZO, PS and PB, which are functions of the fuzzy variables P, , Ape and f' . In this
-1wO -800 My) -403 -2W 0 2W 4W 6W 800 loo0 PUlSS emr, PB
o , , , , ,
-1wO -8w 600 -403 -2W 0 2W 4w 6W Bw 1000 change of pulse em,, A Ps
-1 6 8 06 0 4 6 . 2 o 0 2 0.4 0.6 0.8 1 o@utcnsp"alue S'
Fig. 3 The initial membership functions of the FC-PFLS (All vertical axes are the degree of membership function).
When FC-PFLS settles at the target position, p , = O and Ape =O, it means zero pump voltage (i.e., S'=ZO) is required to maintain FC-PFLS in lock state. When I p , I is
0-7803-4503-7/98/$10.00 1998 IEEE 82
._D U<-" I,_" czV-b '.-b"%." '*_"u'z~z a,a dub U", IO_. I_"" I-*" ,."" ,.". 3."" "Dy ,cw
crossover
U"*, 1,111 ,*U 100 l b . O " L v J 7,HI
evaluation
each cluster
,do 3" ,so ZT O,",B 5 " 1 8 * 4 1 3 3 4 4
Fig. 5 The structure of FC-GA for PFLS.
In general, GA can optimize a problem after determining the chromosome, s1:lection strategy, and objective function.
In GA-FPPC, there are 22 genes to be decided. In Fig. 4a, is the parameter for the PB membership function of the P,, and so forth for the rest ones. Besides, there are also have 4_,,(, r2.0ul ... r7_,, need to be determined. The selection strategy of GA is widely made by elitist selection strategy or roulette wheel selection strategy. Since an ideal GA always has high diversity, the mixed elitist and fuzzy clustering selection strategy is then proposed to maintain high diversity. This kind of GAS is named fuzzy
clustering-based genetic algorithm (FC-GA). This new selection strategy will be discussed and compared with the elitist selection and roulette wheel selection strategies in sections 4and 6, respectively. In this paper, a weighted integral absolute error (WIAE) is proposed as objective function of FC-GA. The WIAE firstly weight the overshoot of the GFC-PFLS and then effectively reduce its actual overshoot. The complete block of the presented FC- GA can be built in Fig. 5.
IV. MIXED ELITIST AND FUZZY CLUSTERING SELECTION STRATEGY
The selection strategies of traditional GA are elitist selection strategy and roulette wheel selection strategy.
The elitist selection strategy always selects better chromosomes to generate the next generation (i.e., offspring). In roulette wheel selection strategy, the fitness value indicates the selected probability of each chromosome to generate next generation [13,14]. Figs. 6a and 6b show the distributions of the selected chromosome by the elitist selection strategy and by the roulette wheel selection strategy, respectively. However, the diversity of roulette wheel selection strategy is usually higher than that of elitist selection strategy. In other words, the elitist selection strategy always searches in a smaller area and converges too fast to get the local optimal value.
Fig. 6
A
.:clustercenter
( 4 (b) (c)
Solution space
,_
... * : selected by elitist selection
0 :selected by fuzzy clustering selection
( 4
The distributions of the selected chromosome for (a) elitist selection strategy, (b) roulette wheel selection strategy, (c) fuzzy clustering selection strategy, and (d) mixed elitist and fuzzy clustering selection strategy.
fuzzy clustering is a process to assign every data to hzzy sets-according-to the distance of each data. In this paper, the fuzzy clustering is used as the selection strategy to maintain the high diversity at each generation due to its inherent ability of clustering. Another advantage of this strategy is easily to get the cluster centers as parents to generate next generation. The distribution of selected chromosome in fuzzy clustering selection strategy is shown in Fig. 6c. In this paper, a mixed strategy including fuzzy clustering selection and elitist selection is presented, and its distribution of selected chromosome is showed in
Fig. 6d. The presented mixed strategy can not only maintain high diversity but also select suitable elite at each generation.
002 8 8 4 01.34697 3920.0, 1 3 6
V. WEIGHTING INTEGRAL ABSOLUTE ERROR The GA objective function is a measure to the chromosome's performance for evaluating the status of each chromosome.
1.5 3 3 2 49.8 38 16170.f23l4590.wp 5 5 4 4 3 4 4
. . . . . ,
. , . , . .
. . . . . ,
. . . . : . . . .
, . . , . ,
. . .
, : . , , I
. . . . . .
, . . , , ,
Time(sec)
Fig. 7 The stair-shape weighting function.
In this paper, the performance requirement of the GFC- PFLS is to have fast step response without overshoot. In order to achieve overshoot less, a stair-shape weighting function (SSWF) with IAE is proposed as the objective function of FC-GA, and named weighted integral absolute error (WIAE). The SSWF as shown in Fig. 7 distributes weighting value as a stair shape breaking at time ta where is the first zero error point (i.e., moving distance just equals to the input reference distance) in a typical step response. The SSWF and WIAE are defined as
where c is positive constant.
In (6), a slow (fast) step response with small (large) overshoot will be given for large (small) c. Interestingly, IAE is the special case of WIAE when c is equal to 1.
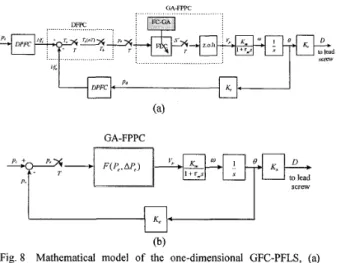
VI. GA-FPPC FOR THE GFC-PFLS SYSTEM Figs. Sa and 8b show the complete and simplified mathematical model of the one-dimensional GFC-PFLS.
The relevant parameters are defined as follows:
T the sampling period T, the time base period
z, the mechanical time constant of the motor
K, the DC gain including the motor and driver ( r a d s e c h ) K, the conversion ratio of the angular displacement to the
length of lead screw (cmlrad)
Kc the conversion ratio of the angular displacement to the number of pulse (!/rad)
DFFC
GA-FPPC
""I I screw
(b)
Fig. 8 Mathematical model of the one-dimensional GFC-PFLS, (a) complete model and (b) simplified model.
The GFC-PFLS is built by MATLAB to tune its membership fimctions and fuzzy inference rules.
Table. 2 Parameters of FC-GA
l ~ o o u ~ a t i o n size 150 I
Many parameters are specified as shown in Table 2 before FC-GA tunes the GA-FPPC. These values are selected by empiricism. After tuning, the final chromosome is shown in Fig. 9a, the membership functions are shown in Fig. 9b , and the rule table is shown in Table. 3 .
0 , , , , , , , , ,
-1wO -8W %@I -403 -200 0 200 400 600 600 1wO
-1w0 aw -6w -4w -2w o 200 4w 600 8w I OW rhangs of pulse m o r , A Pe
0 , , , , , , , , ,
-1 0 8 4 . 6 4 . 4 4.2 0 0 2 0.4 0 6 0 6 1
output crisp Y.I"B. S'
(b)
Fig. 9 (a) The chromosome of GA-FPPC, and (b) The membership functions of GA-FPPC.
0-7803-4503-7/98/$10.00 1998 IEEE 84
Table.3 The h r z y inference rule table after tuning by FC-GA.
Pe
AP,
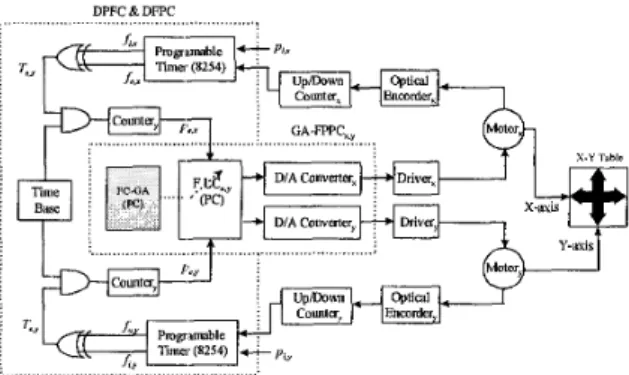
A two-dimensional GFC-PFLS for serving a X-Y square table with 45 x 45 cmz is realized and its realization block diagram is shown in Fig. 10. The lock-in ranges for X- and Y-dimensional scxvos are specified within k 1 cm. In this case, we let the displacement conversion rate Kc is 5 0 0 / ~ pulses per rad. The mechanical time constant 2, of the motor is 115 msec, the DC gain Km of the motor with driver is 6.7 cmhec/V and the pitch of the lead screw is 1 cm, where the minimum resolution is equal to 10 pm
(1 cm/lOOO pulsedone turn).
DPFC & DFPC ... .,
... ... ...
Fig 10 The realization block diagram of GFC-PFLS
' : U
I i ... ... ... I..:
1, Pmgmmblc '.
>
...
Fig. 10 The realization block diagram of GFC-PFLS
In this system, the fuzzy inference rule table before tuning is shown in Table la, and its initial membership functions are shown in Fig. 3. The 3-D mesh surface description before tuning and after tuning are respectively shown in Fig. 1 1.
(b)
Fig. 11 3-D mesh suirface description of the output of GA-FPPC, (a) before tuning and (b) after tuning.
The simulation and experiment for short- (3cm), middle- (locm), and long- (3Ocm) distance servos in the presented GFC-PFLS are conducted and shown in Fig. 12.
. . . . , . . . .
. . . .
...
... /.. ...
... . . . ... . . .
0 o s I 1 5 2
...I ...
0 0.5 1 1.5 2 2 5 3
T,ic(S*O)
x 10'
0 2 4 6 8
Time(sec)
(c)
. . . ... ; ... ; ...
0 0 5 I 1 5 2 2.5 3
'rim(src)
(e)
Fig. 12 Simulation and experiment responses for short- (3 cm), middle- (10 cm), and long- (30 cm) distance servos; (a),(b) and (c) are the comparisons before (...-) and after ( - ) tuning; (d), (e) and (0 are the comparisons of simulation ( __ ) and experiment (000).
As shown in Fig. 12 is the simulation and experiment results of the GFC-PFLS for short- (3 cm), middle- (10 cm), and long- (30 cm) distance servos. In Fig. 12, (a), (b) and (c) are the comparisons before and after tuning; (d), (e) and (f) are the comparisons of simulation and experiment.
It is clearly shows that the GA-FPPC after FC-GA tuning provides fastest locking response without overshoot.
. . . .
. . . .
. . I .
. . . .
. . . .
. . . .
. . . .
. . . .
. .. .. ..
. . . .
. . .
. . . .
...
...
. . .. .. ..
"0 0 5 1 1.5 2 2.5 3
Time(sec)
Fig. 13 The proposed WIAE compared with IAE, ISE, and ISTE for step-input responses.
In order to explore the performance of the presented WIAE, step responses to GFC-PFLS tuned by different objective functions (IAE, ISE, and ISTE) are conducted.
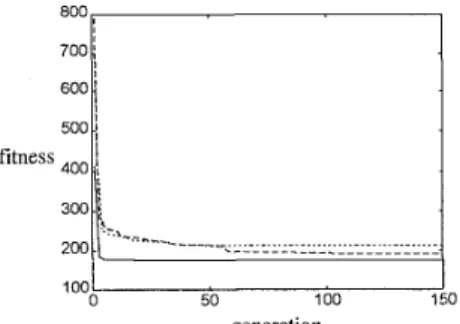
The proposed WIAE (with c=10) compared with IAE, ISE, and ISTE for step-input responses are depicted in Fig. 13 for comparison. The WIAE can actually provide good performance index for tuning variables of the presented The convergent performance of the elitist selection strategy, roulette wheel selection strategy and mixed elitist and fuzzy clustering selection strategy is shown in Fig. 14.
The proposed mixed elitist and fuzzy clustering selection strategy can converge the fitness value at the minimum value as fast as the elitist selection strategy.
GA-FPPC.
, O50 O100 U150
generation
Fig. 14 Comparison of the convergent performance, elitist selection (...), roulette wheel selection (- - - -), and mixed elitist and fuzzy clustering selection (-).
VII. CONCLUSION
In this paper, a genetic algorithm-based fuzzy pulse pump controller (GA-FPPC) is proposed to achieve a genetic algorithm-based FC-PFLS (GFC-PFLS). A set of fuzzy inference rules and three sets of membership functions are constructed by the presented fuzzy- clustering-based genetic algorithm (FC-GA). It is very effective to reduce the convergence time of GA and to converge the chromosome at a near-optimal value. Besides, the WIAE is also proposed as the objective function of the FC-GA, which can get a fast response without overshoot.
The experiment and simulation show that the GA-FPPC can provide near-optimum motion profiles for the X-Y mode GFC-PFLS to achieve the fastest locking response without overshoot.
VIII. REFERENCES
[l] A. W. Moore, “Phase locked loops for motor-speed [2] G. C. Hsieh, P. P. Wu, C. H. Lee, and C. H. Liu, “An adaptive digital pump controller for phase-locked servo systems,” IEEE Trans. Ind. Electron, vol. IE-34, no. 3, Aug. 1987, pp. 379-386.
control,” IEEE Spectrum, April 1973, pp.61-67.
0-7803-4503-7/98/$10.00 1998 IEEE 86
G. C. Hsieh, “A study on position servo control systems by frequency-locked servo system using the slope-varied digital-pump technique,” IEEE Trans.
Ind. Electron, vol. 36, no. 3, Aug. 1989, pp. 365-373.
J. C. Li, G. C. Hsieh, “A phaselfrequency-locked controller for stepping servo control system,” IEEE Trans. Ind. Electron, vol. 39, no, 2, April 1992, M. F. Lai, G. C. Hsieh, Y. P. Wu “Variable slope pulse pump controller for stepping position servo control system using frequency-locked technique,”
IEEE Trans. Ind. Electron, vol. 42, no. 3, Jun1995, pp.
G. C. Hsieh, L. R. Chen, K. L. Hsieh, H. C. Wu, and J.
H. Hsu, “Adaptive pulse-pump controller for X-Y mode frequency-locked stepping servomechanism,”
Journal of the Chinese Institute of Engineers, vol. 2 1, no. 1, 1998, pp. 47-58.
M. F. Lai, M. Nakano, and G. C. Hsieh, “Application of fuzzy logic in phase-locked loop speed control of induction motor drive,” IEEE Trans. Ind. Electron, vol. 43, no. 6, Dec. 1996, pp. 630-639.
G. C. Hsieh, and J. C. Hung, “Phase-locked loop techniques-A survey,” IEEE Trans. Ind. Electron., vol.
43, no. 6, Dec. 1996, pp. 609-615.
G. C. Hsieh, H. M. Lee, L. R. Chen and Y. J. Penth,
“A study of phaselfrequency-locked servo system by fuzzy control technique,” Proc. IEEE Int. Con$ SMC., pp. 1 12-1 19.
290-299.
1997, pp. 1323-1328.
[ 101 Jyh-Shing R. Jang, “Self-learning fuzzy controllers based on temporal back propagation,” IEEE. Trans.
Neural Network., 1992, pp. 7 14-723.
[ 1 11 Hamid. R. Bereji, and Pratap Khedkar, “Learning and tuning fuzzy logic controllers through reinforcements,“ IEEE. Trans. Neural Networks., 1992, [12]Chin. Teng. Lin, and C.S George. Lee, Neural Fuzzy
Systems, Prentice-Hall, 1996
[ 131 Mitsuo. Gen, and Runwei. Cheng, Genetic Algorithms
& Engineering Design, Wiley, 1997
[14]K. F. Man, K. S. Tang, and S. Kwong, “Genetic algorithms: concepts and applications,“ IEEE Trans.
Ind. Electron., vol. 43, no. 5, Oct. 1996, pp. 5 19-534 [15]Hartmut Surmann, “Genetic ptimization of a fuzzy
system for charging batteries,“ IEEE Trans. Ind.
Electron., vol. 43, no. 5, Oct. 1996, pp. 541-548.
[ 161 Hyun-Joon Cho, Kwang-Bo Cho, and Bo-Hyeun Wang, “Fuzy-PID hybrid control: automatic rule generation using genetic algorithms,” Fuzzy Sets and Systems, 1997, pp. 305-316.
[ 171 X. M. Qi, T. C. Chin, “Genetic algorithms based fuzzy controller for high order systems,” Fuzzy Sets and Systems, 1997, pp. 279-284.
pp. 724-740.