行政院國家科學委員會專題研究計畫 成果報告
二次多項式在機器人奇異點及工作空間分析上之應用 研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 100-2221-E-011-044-
執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學機械工程系
計 畫 主 持 人 : 蔡高岳
計畫參與人員: 碩士班研究生-兼任助理人員:陳馨怡 碩士班研究生-兼任助理人員:羅伊婷
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 101 年 10 月 25 日
中 文 摘 要 : 當機器人靠近奇異點時會呈現非常不穩定之狀態而造成系統 當機,因此如何在最短時間內判斷是否接近奇異點為機器人 控制上最為關鍵之問題。目前大多以賈式矩陣定義之操控性 指數判斷與奇異點接近之程度,但因必須先完成反位移分析 之後才能應用這些指數,因此在時效上可能不符合控制(尤其 是即時控制)上之需求。本計畫首先將提出以反位移分析二次 多項式之係數直接判斷工業用機器人與奇異點接近程度之方 法,此方法不需使用賈式矩陣定義之操控性指數而且在解位 移多項式之前就可以判斷與奇異點接近之程度因此可大幅改 進計算效率並降低控制成本。本計畫之第二部分將研究三鏈 六自由度並聯式機器人之方位工作空間,理論上分析此類機 器人之過程遠比 Stewart 型機器人複雜,但此計畫中提出之 方法僅需解工業機器人反位移分析之二次多項式即可決定這 些機器人方位工作空間大部分之邊界,其他邊界可由解四次 式或搜尋法求得。導出之方法可輕易延伸至各種不同類型之 機器人之三鏈六自由度並聯式機器人。
中文關鍵詞: 奇異點,工業用機器人,三鏈並聯式機器人,方位工作空 間,二次多項式
英 文 摘 要 : A manipulator becomes very unstable and might cause the system to break down when it approaches a
singular configuration. Therefore, how to efficiently detect and stay away from singularity is the most essential task in the control of a manipulator.
Several dexterity measures developed from the Jacobian matrix have been presented to detect the closeness to singularity. However, those measures cannot be employed until the inverse kinematic solutions are obtained, so they might not meet the time requirement for the control of a
manipulator(especially on-line control). This work first presents methods to detect singularity for industrial manipulators. The closeness to singularity can be detected without using the Jacobian or solving the inverse kinematics, so they are much more
efficient than the existing methods. The second part of this work investigates the orientation workspace of 3-chain 6-DOF parallel manipulators. Although the kinematic analysis for this type of manipulators is more complicate than that of a Stewart manipulator, the proposed methods in the work can determine a
major part of the boundary surface of the orientation workspace by solving the inverse kinematics of
industrial manipulators. Other portions of the boundary surface can be developed by solving
biquadratic equations or searching techniques. With some minor modifications, the presented methods are applicable to many different types of 3-chain 6-DOF parallel manipulators.
英文關鍵詞: singularity; industrial manipulator; 3-chain; 6- DOF parallel manipulator; orientation workspace
行政院國家科學委員會專題研究計畫 成果報告
二次多項式在機器人奇異點及工作空間分析上之應用 研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 100-2221-E-011-044-
執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學機械工程系
計 畫 主 持 人 : 蔡高岳
計畫參與人員:
碩士班研究生-兼任助理人員:陳馨怡 碩士班研究生-兼任助理人員:羅伊婷
處 理 方 式 : 本計畫可公開查詢
中 華 民 國 101 年 10 月 25 日
1
行政院國家科學委員會專題研究計畫成果報告
二次多項式在機器人奇異點及工作空間分析上之應用 計畫編號 : NSC 100-2221-E-011-044-
執行期限 : 100 年 8 月 1 日至 101 年 7 月 31 日 主持人 : 蔡高岳 國立台灣科技大學
共同主持人 :
計畫參與人員 : 陳馨怡、羅伊婷
國立台灣科技大學 中文摘要
當機器人靠近奇異點時會呈現非 常不穩定之狀態而造成系統當機,因 此如何在最短時間內判斷是否接近奇 異點為機器人控制上最為關鍵之問題。
目前大多以賈式矩陣定義之操控性指 數判斷與奇異點接近之程度,但因必 須先完成反位移分析之後才能應用這 些指數,因此在時效上可能不符合控 制(尤其是即時控制)上之需求。本計畫 首先將提出以反位移分析二次多項式 之係數直接判斷工業用機器人與奇異 點接近程度之方法,此方法不需使用 賈式矩陣定義之操控性指數而且在解 位移多項式之前就可以判斷與奇異點 接近之程度因此可大幅改進計算效率 並降低控制成本。本計畫之第二部分 將研究三鏈六自由度並聯式機器人之 方位工作空間,理論上分析此類機器 人之過程遠比 Stewart 型機器人複雜,
但此計畫中提出之方法僅需解工業機 器人反位移分析之二次多項式即可決 定這些機器人方位工作空間大部分之 邊界,其他邊界可由解四次式或搜尋 法求得。導出之方法可輕易延伸至各 種不同類型之機器人之三鏈六自由度 並聯式機器人。
關鍵詞: 奇異點,工業用機器人,三鏈 並聯式機器人,方位工作空間,二次 多項式
ABSTRACT
A manipulator becomes very unstable and might cause the system to break down when it approaches a singular configuration. Therefore, how to efficiently detect and stay away from singularity is the most essential task in the control of a manipulator. Several dexterity measures developed from the Jacobian matrix have been presented to detect the closeness to singularity.
However, those measures cannot be employed until the inverse kinematic solutions are obtained, so they might not meet the time requirement for the
control of a manipulator(especially on-line control). This work first presents methods to detect singularity for
industrial manipulators. The closeness to singularity can be detected without using the Jacobian or solving the inverse kinematics, so they are much more
2
efficient than the existing methods. The second part of this work investigates the orientation workspace of 3-chain 6-DOF parallel manipulators. Although the kinematic analysis for this type of manipulators is more complicate than that of a Stewart manipulator, the proposed methods in the work can determine a major part of the boundary surface of the orientation workspace by solving the inverse kinematics of industrial manipulators. Other portions of the boundary surface can be
developed by solving biquadratic equations or searching techniques. With some minor modifications, the presented methods are applicable to many different types of 3-chain 6-DOF parallel
manipulators.
Key word: singularity; industrial manipulator; 3-chain; 6-DOF parallel manipulator; orientation workspace
1. 前言
當機器人在工作空間(workspace) 內之運動路徑接近奇異點(singular point)時其各軸速度會瞬間增大(理論 值為無限大)因此容易撞擊到異物而受 損,如果機器人沒有保護裝置則會造 成系統當機,因此需要先運動模擬或 是藉由各種控制方法避開奇異點,而 如何在最短時間內判斷是否接近奇異 點則為機器人控制上最為關鍵之問題。
雖然目前已經有一些方法可以確認一 機器人之所有奇異點位置,但在時效 上可能不太理想。例如使用賈氏矩陣
定義之操控性指數需要事先知道各軸 位移量,此代表必須先完成反位移分 析之後才能夠代入這些指數以評估奇 異點接近之程度,如果能夠利用反位 移分析過程中得到之部分數據直接判 斷與奇異點接近之程度將可大幅提升 運算效率而可以在最短的時間內迅速 避開奇異點。理論上反位移分析所使 用二次多項式之判別式可用來評估與 奇異點接近之程度,但判別式值之大 小會隨著機器人尺寸之大小或使用不 同物理單位而改變,此外初步研究發 現當二次多項式之三個系數趨近於零 時會產生較大之誤差因此並非一理想 之指數。此計畫第一部分首先簡化反 位移分析之公式並提出直接以這些公 式判斷與奇異點接近程度之方法。提 出所使用之指數與機器人尺寸大小或 使用之物理量無關,當指數值大於 1 時方程式無解(此代表所分析之點位於 該機器人工作空間之外),指數為 0 時 代表機器人已到達奇異點,而指數等 於 1 時代表機器人位於離奇異點最遠 之位置。
以解析法求得六自由度並聯式機 器人之方位工作空間為機器人學上最 難解決的難題之一,而求得一
compatible 方位工作空間(定義為一可 經由連續運動到達之範圍)則更為複雜,
目前僅有一篇學術論文提出方法求得 Stewart 型機器人之 compatible 方位工 作空間。決定一方位工作空間之困難 度與反位移分析有密切的關係。
Stewart 型機器人之反位移分析只使用 到座標轉換而不需解任何方程式,但 本計畫所研究之三鏈機器人則需解二
3
次或四次多項式,因此以解析法分析 此類機器人 compatible 方位工作空間 之過程將遠比 Stewart 型機器人複雜。
本計畫提出以解二次式為基礎求得 3-CSR 及 3-CRS 並聯式機器人之 compatible 方位工作空間之方法。方位 工作空間之邊界大多由驅動軸位移限 制所產生,此部分邊界大多可由二次 式求得,至於非驅動軸位移限制以及 奇異點所形成之邊界,則以解四次式 配合搜尋法求得,所提出之方法將可 運用於各種不同類型之三鏈六自由度 並聯式機器人。
在相關研究方面,串聯式機器人奇 異點在約 20 年前曾經被廣泛的研究且 在此領域已經發表相當多的論文 [1-10],這些論文提出各種演算法或操 控性指數(dexterity measures)來判斷一 機器人與奇異點接近之程度。但自從 機器人學之研究重心轉移至並聯式機 器人之後已經很少在看到此方面之論 文。目前使用之操控性指數大多應用 到賈氏矩陣之行列式值或奇異值,工 業機器人因構造簡單而可以得到非常 簡短之行列式值(所有奇異值之乘積) 公式,因此使用行列式值將具有較佳 之時效性。
在非 Stewart 行三鏈六自由度並聯 式機器人之研究方面有些學者提出設 計或分析之方法[11-16],但是在工作 空間之研究方面相關之論文數量相對 比較少,其主要原因為求得六自由度 並聯式機器人工作空間之困難度相當 高,目前所使用之方法大多以搜尋法 為主。
2. 工業用機器人之奇異點 機器人之運動學可由
1 2 3 4 5 6
A A A A A A
E
求解,其中E為終端 器之位置及方位,而A 則為一 D-H 矩
i 陣。將上式改寫為A A A A A1 2 3 4 5 EA61 時,因末三軸交於一點之特性,方程 式可簡化為1 2 3 4
0 0
1 1
X A A A Y
d Z
(1)
其中 X,Y,Z 為常數
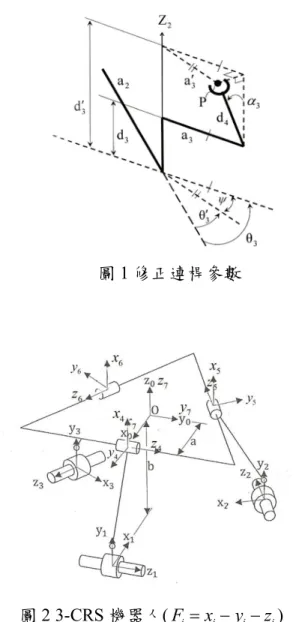
利用圖 1 中之幾何關係可將
d 修正為
4 0,而簡化反位移分析之過程,圖中之' 2 2 2
3 3 4 3
'
3 3
1 4
3
4 3
3
a a d sin α d d d co
tan sin
sα
d
a
首先由這些修正參數解出
,再
1, 2, 3' 令
3
3'ψ即可得到正確之反位移 解。工業機器人當 或 時即到達
5 0 奇異點位置,因此本文僅討論前三軸 所產生之奇異點。(1)
a 及
1 0 且
2 0
1 90 或 -903'
之解可由下式求得
cosθ =( )
≡ σ (2) 令 μ = 1 − |σ |,則
(a) 當μ < 0時無反位移解。
(b) 當μ = 0(
=0 或 )到達奇
3' 異點。4
(c) μ 值愈大愈好,當μ 值為最大 值 1 時離奇異點最遠。
之解可由下式求得
1√ sinθ +
√ cosθ =
−cosφsinθ + sinφcosθ = sin (φ − θ ) =
√ ≡ σ 其中
atan2 YX (3)
若d + d ≠ 0則參考點 P 永遠無法到 達Z 軸,因此可令μ = 1 − |σ | ,則
(a) 當
<0 時無反位移解。
2 (b) 當 =0 時到達奇異點。
2 (c) 值愈大愈好,當
2 值為
2最大值 1 時離奇異點最遠。
另一方面,若d + d = 0,則機器人 可能到達
Z 軸,此時式(3)之
0 2 0
0, 此情況代表所產生二次式之三個係數 均為零,而具有無限多之 解,因
12 2
X Y =0 代表機器人已到達
Z 軸
0上之奇異點,故可直接以 X2Y2判 斷與奇異點接近之程度。
(2) = 及 ≠ °
3
'
之解可由下式求得√ cosθ +
√ sinθ = cos φ cosθ + sin φ sinθ = cos (φ − θ ) =
( )
√
≡ σ (4)
其中 u = 2a a , v = 2d a sinα ,
atan2v u
令 μ = 1 − |σ |,則
(a) 當μ < 0時無反位移解。
(b) 當μ = 0到達奇異點。
(c) μ 值愈大愈好,當μ 值為最大 值 1 時離奇異點最遠。
之解可由下式求得
1√ cosθ −
√ sinθ =
sinφcosθ − cosφsinθ = sin(φ − θ )
= √
≡ σ (5)
其中
atan2Y X
令μ = 1 − |σ | ,則(a) 當
<0 時無反位移解。
2 (b) 當 =0 時到達奇異點。
2 (c) 值愈大愈好,當
2 值為
2最大值 1 時離奇異點最遠。
(3) ≠ 、 = °、 = ± °
之解可由下式求得
1√ sinθ +
√ cosθ =−cosφsinθ + sinφcosθ = sin(φ − θ )=
√
≡ σ (6)
其中
atan2Y
X
5
若
d
3'd
2 ,則令μ = 1 − |σ | 0 (a) 當μ < 0時無反位移解。(b) 當μ = 0到達奇異點。
(c) μ 值愈大愈好,當μ 值為最大 值 1 時離奇異點最遠。
若d + d = 0則奇異直線剛好與Z 軸 重合,此時判斷接近奇異點之方法可 利用 X2Y2作為判定接近奇異點之 依據。
3'
之解可由下式求得
cosθ = (X + Y + Z + a + d + d − 2a Xcosθ − 2a Ysinθ − Zd − 2d Xsinθ sinα + 2d Ycosθ sinα + 2d d cosα − 2Zd cosα − a − a − d )/2a a ≡ σ (7) 令μ = 1 − |σ | ,則
(a) 當
<0 時無反位移解。
2 (b) 當 =0 時到達奇異點。
2 (c) 值愈大愈好,當
2 值為
2最大值 1 時離奇異點最遠。
(4) = °
3'
之解可由下式求得
sinθ = ≡ σ (8) 令 μ = 1 − |σ |,則
(a) 當μ < 0時無反位移解。
(b) 當μ = 0到達奇異點。
(c) μ 值愈大愈好,當μ 值為最大 值 1 時離奇異點最遠。
之解可由下式求得
1√ cosθ +
√ sinθ
=cosφcosθ + sinφsinθ = cos(φ − θ ) = (X + Y + Z + a + d + d − 2Zd + 2d d − 2Zd − a − a −
d − 2a a cosθ )/(2a √X + Y )
≡ σ (9)
令μ = 1 − |σ | ,則
(a) 當
<0 時無反位移解。
2 (b) 當 =0 時到達奇異點。
2 (c) 值愈大愈好,當
2 值為
2最大值 1 時離奇異點最遠。
此節提出求得三軸機器人之其中二軸 軸位移之公式,每一種機器人可由解 兩個二次式而得到四組解,將每一組 解帶回式(1)之 x 及 y 分量可求得對應 之第三軸位移量。
3. 三鏈六自由度並聯式機器人方位 工作空間
3. 1 CSR 並聯式機器人
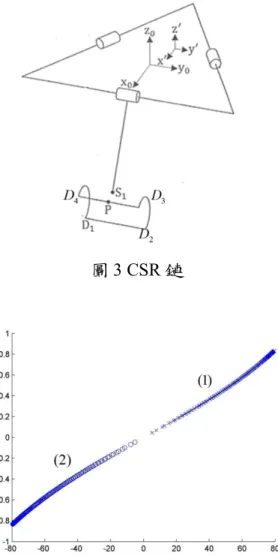
圖 2 為一 3-CSR (cylindrical-spherical revolute)機器人,其中座標系 Fo及 F7
分別為附著在固定及移動平台上之座 標系;座標系 F1, F2及 F3為固定於地 面上之三個 C 接頭,且 Z 軸方向為 C 接頭之軸向;F4、F5及 F6則為移動平 台上之旋轉軸座標系,且 Z 軸方向為 轉軸方向。對於 Fo及 Fi 座標系之向 量或座標 s 分別表示為 s 及 。 3.2 反位移分析
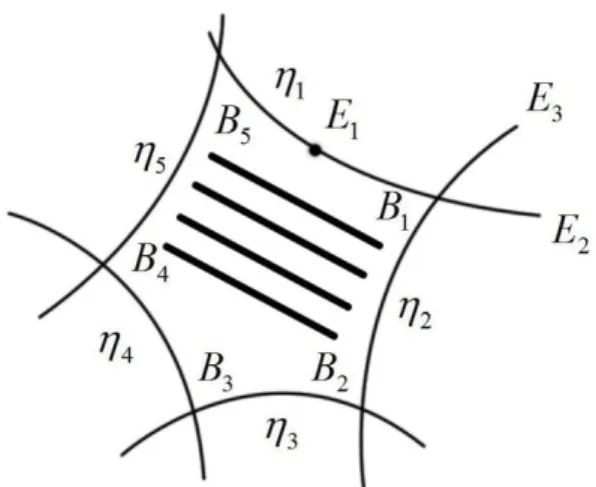
圖 3 為連接於平台上之第一個 CSR 鏈。以球窩接頭繞旋轉接頭旋轉 時所產生之圓之方程式可表示如下:
2 2
2 2
4 1
cos sin 0 1
a S a
(10)
若 kTj 定義為從 Fj 轉換至 Fk 之齊 次轉換矩陣,則第一鏈圓方程式轉換
is
6
至相對於 F1 之方程式表示如下:
(11) 其中 and 為常數矩陣,而 可以平台上參考點座標(x, y, z)及平台 之方位( )六個參數定義。
圓柱接頭上的 S1點沿著軸向旋轉及平 移時,所得到之圓柱方程式可表示 為:
(12)
由式(11)及式(12)之 x,y 分量,利用 x2+y2 可得1S12x 1S12y a12。在反位移 分析中,參數 x, y, z, ,
及 為已知,因此方程式中僅有未知數
。將
22
2 2
2
sin 2 1
t
t 及
2 2
2 2
2
cos 1 1
t
t
代入式 中可得
(13) 其中 。式(13)中最多只有兩 個
2之實數解,其原因為圓與圓柱最 多僅有兩個交點。當方程式(13)之兩個 實數解當相等或無窮大時可互換;趨近於 或 ( 趨近於 或 )時,
會產生連桿干涉現象,因此方程式的 兩個解必須相同時才可互換。當兩個 解相同時,代表旋轉軸所構成的圓與
圓柱交於一點或是相切。 在
為遞增函數。圖 4 為式(13) 中不同驅動軸位移所產生的兩個解之 軌跡。由圖可看出其中一解之
t
( tant
2 )值永遠大於另一解之
t
值,因此本文將以
t
值之大小區分兩解。3.3 驅動軸位移限制
機器人的方位工作空間(下文稱之 為工作空間)為一個三度空間,其中邊 界曲面為一兩度空間,因此只需一個 拘束條件即可得到工作空間之可能邊 界曲面。這些拘束條件可由驅動軸位 移限制、非驅動軸位移限制、奇異點 及連桿干涉現象形成。連桿間干涉現 象可分為兩類,一為相鄰連桿間之干 涉,此類干涉可經由連接兩桿之軸位 移限制避開;另一類為互不相鄰連桿 間之干涉,但對於三鏈機器人而言此 類干涉不太可能發生。理論上只要選 擇適當的驅動軸位移範圍,即可避開 除了驅動軸位移限制之外之其他所有 拘束條件,但本文亦提出方法可求得 除連桿干涉現象之外其他拘束條件所 形成之邊界。驅動軸位移限制所形成 之邊界可經由解二次式求得,其他類 型拘束所形成之邊界,則可經由解四 次式或搜尋法求得。
由驅動軸位移限制所形成之邊界 曲面可經由令式(11)及式(12)之 x,y,z 三 個分量相等所產生之方程式求得,此 三個方程式含
, , , 2, , d1 1六個變數,若要求得由
1max
1所形成之邊界曲 面與
0
平面交集所得到之邊界曲 線時,可以令
0 ,
1max
1,其次
1
2 2
1 1
2 2
1 1 1
1 1 4
1
cos sin 0 1 1
x y z
s a s a s
o 7
o 7
s T T T
1
To 7T4 oT7
, ,1 1
1 1
1 1
1
cos sin
1
a
a d
s
4 3 2
1 2t 2 2t 3 2t 4 2t 5 0
2 tan 2
t
2
2
t2
tan 2
2
2
7
改變
d 之值並解三個方程式求得
1 , , 2 ,所得到 ( , )
點之集合即為在
0
剖面上之邊界曲線,但使方法需 要解三個非線性聯立方程式。此節將 提出可解二次式求得邊界曲線之方 法。圖 5a 表示為建置於平台上之一 3R 虛擬機器人,其連桿參數為 = 0,
= 0, (式(10)中之
a
2) 及 ,其中 'b 代表連桿參數或
是矩陣b
對應於第一鏈上之虛擬機器 人之參數。若平台之方位以 Z-Y-X 尤 拉角表示,如圖 5b 所示,則角度 可對應於虛擬機器人之 , 及扭轉 角 。由第一鏈上驅動軸位移 d1max, d1min, 或 在
0
剖面所產生之可能邊界曲線可以令 ,
移動 S1點至每一個極限位置(圖 5a 之 曲線 Q1Q2Q3Q4),並利用反位移分析求
得虛擬機器人之 , 及
(等於式(10)中之 ),而所得到
1 2
( ',
')之集合即為對應之邊界曲 線。當 F7為 3R 虛擬機器人之參考座 標系時,S1點之座標為 , , 之函 數,以 D-H 矩陣表示時方程式可表示 為:
(14)
S1之座標經由圓柱接頭之迴路亦可表 示為
(15)
計算 P 點之方位工作空間時,必須先 將座標系從固定座標系轉換至 F7,假 設 P 點座標為 xp, yp, zp,則轉換矩陣表 示如下
(16)
當S1點沿著圖 5a 中之曲線 Q1Q2Q3Q4
運動時,則 d1及 之位移為已知參數,
因此 可由式(15)中計算,並帶入至 式(14)求得 , 及 。
虛擬機器人之反位移解可經由求 解二次式方程式求得,利用式(14)之 x,y,z 分量導出 x2+y2+z2,可產生一條
之二次多項式。而後將所得之
3'
帶入式(14)之 z 分量可得
之 二次多項式。最後將四組(
2', 3')分別 代入式(14)之 x 及 y 分量產生含sin
1' 及cos 之兩條線性方程式,解出
1'sin
及
1' cos 之後可得到
1' 之唯一 解。此四組解可由解 及
3' 時兩個二
2' 次式之判別式之正負號組合(+,+),
(+,-),(-,+),(-,-)
定義。由於 及
3' 代
2 表相同之軸位移,因此必須選擇四組 解中
2
3'之解求得方位工作空間之 邊界。圖 6 說明工作空間之某一剖面上 之邊界曲線,其中 , , , 及 分
a
11 2 3
d = d = d
a
3 a
21 90o
, ,
1
2
2
1max
1min2 o
1( )
2 (
)
3
2
1
2
37 1 7
1 7
1
0 0 0
1 1
x y z
s s s
1 2 3
A A A
7
1 1
1 7
1 1
1 7
1 1
cos sin
1 1
x y z
s a s a s d
7 o
o 1
T T
p
p
p
1 0 0 x 0 1 0 y 0 0 1 z 0 0 0 1
7
To
1 7s1
1
2
3tan 3
2
tan 2
2
1
1
2
3
4
58
別代表第一鏈驅動軸位移限制、第二 鏈驅動軸位移限制、非驅動軸旋轉軸 之限制、球窩接頭之限制及奇異點所 形成之邊界。任何一曲線將平面分為 兩個半平面,例如
1max
1產生圖中 曲線,若曲線之一邊滿足
1max
1,則 曲線另一邊滿足
1max ,圖 6 中之工
1 作空間為 , , , 及 之某一邊之 區域交集而成。工作空間中之所有邊 界拘束方程式所得之解必須不違反其 他運動拘束條件(亦即所得之所有軸位 移皆位於其運動區間之內),才可形成 工作空間之邊界曲線,圖 6 之五個線 段分別連接於分支點 B1, B2, B3, B4 及 B5。若使線段由 E1點開始,順時鐘方 向經過 B1到達 E2點,此時產生線段 之驅動軸會超過其他軸位移限制,因 此在 B1須改變拘束方程式以求得下一 個段邊界曲線。此時有兩種可能方向,若路徑向上走至 E3點,則產生 之驅 動軸會超出軸位移限制,因此必須改 變方向以求得 B1B2線段。由
E
1點出發 之曲線經過B
1點時,第二鏈上之 C 接 頭會超出其驅動軸位移限制,因此必 須改由第二鏈上之虛擬機器人產生線 段B B 。但是由此機器人所得到之(
1 2 ,, )為對應於此機器人之局部座標 (local coordinates),因此所得之結果必 須轉換至第一鏈虛擬機器人坐標系之 全域座標( , , )。第二、三鏈虛擬機 器人之局部座標( ,
2 2, 2)及3 3 3
( ,
, )可分別由下式求得(17)
(18) 其中 及 分別為第二、三鏈之虛 擬機器人 D-H 轉換矩陣。令 Ro
及 Rj
, j = 2, 3.
則各鏈上之旋轉角 ( , , )及( , , )由下式可轉換至固定座標系之 座標
(19) 及
(20) 將式(19)左右兩邊之中[3,3]元素除以 [3,4]元素可得到
(21) 其中 g 為複雜之非線性函數。此方程 式可用來確定 ( , , ) 轉換至( ,
, )時,是否可得到所要之 ,
以將邊界點繪於 之剖面上。第三
鏈之類似公式可由式(20)導出。
利用虛擬機器人方法求得第二鏈 之邊界線段 B1B2時,首先解以下方程 式:
(22) 將 B1點之尤拉角從( , , )轉換至 ( , , ),並利用 做為第二鏈虛擬 機器人之扭轉角 。接著移動 S2 點 (沿著邊界曲線,相似於圖 5a 之
1
1
2
3
4
5
2
1
2
2
2
3 3
3 3
7 2
3
0 0 cos
0 ( , 120 ) 0 sin
0 0
1 0 0 0 1 1
o
o o
a
rot z a
d
1 2 3
A A A T T
5 5
5 5
7 3
5
0 0 cos
0 ( ,120 ) 0 sin
0 0
1 0 0 0 1 1
o
o o
a
rot z a
d
1 2 3
A A A T T
i
A Ai
( , )
z
( , )y
( , )x
rot rot rot ( , )z
j rot rot( ,y
j)rot( ,x
j)
2
2
2
3
3
3( ,120 )z o ( , 120 )z o
o 2
R rot R rot
( , 120 )z o ( ,120 )z o
o 3
R rot R rot
2 2 2
tan
g
( ,
, )
2
2
2
o
o
( , 120 )z o ( ,120 )z o
2 o
R rot R rot
2
2
2
2
29
Q1Q2Q3Q4)到下一個邊界點並求解虛 擬機器人反位移( , , ),並確認所 得之解是否滿足
(23) 一般所得到之點之
不會等於
0,但 h 之值已經非常接近 0,因此可利用二分 法求得滿足式(23)之 。令或 並利用第
二鏈虛擬機器人之反位移分析以得到 及 ,使其滿足
< 0 之條件,
然後利用二分法求 (介於 及 ) ,使得 = 0。其中
及
2*2*
為 = 之第二鏈虛擬機器人 反位移解。對於下一個 剖面之邊 界點可利用式(19)將 轉換至 ( , , ),重複以上流程直到其他接頭 超出軸位移限制。第三鏈上虛擬機器 人之邊界曲線可用類似之方法求得。3.4 其他拘束條件
當給予 TCP 座標 x,y,z 時,對應於 第一鏈上非驅動旋轉接頭滿足
2 min 2 2 max
之兩條拘束方程式:及 = 0 (24) 可將 及 分別代入至式(13)求 得。所得到之方程式可轉換為 x 之四 次式,其中 x = ,而係數則為 及 之函數。此方程式將用來求得圖 6 中之 B2B3線段。
圖 7 為第一鏈球窩接頭到達其極 限位置之示意圖,其中 為最大允
許角度,P1為球窩接頭中心線上之參 考點,Q1為連接桿上之另一參考點。
當球窩接頭到達極限位置時 P1及 Q1
之距離為
(25) 此方程式為 , , 及 之函數,
當球窩接頭 S 位於位移限制內時,
,式(25)將用來求得圖 3-6 中之
B B
3 4線段。圖 6 中線段 B4B5由兩種類型奇異 點所產生。本文探討之奇異點分兩類,
第一類奇異點由虛擬機器人所產生,
當虛擬機器人工作空間之邊界曲面與 同一鏈 C 接頭所產生之圓柱有交集時 即形成此類奇異點。當虛擬機器人之 反位移分析所用之任一判別式為零時 即代表已經到達第一類奇異點,求解
3'
之二次式可表示為
= 0,其中 。當 = 0 或 時 其判別式為 0, 趨近於 時,連桿將 發生干涉(平台與連接桿),因此
之奇異點可忽略。將 = 0 帶入方程式 中,可得到 = 0。此方程式可簡化 之二次式,而其係數則為
之函數。
1 得到( , )之點後,再利用虛擬機器 人之反位移分析求得對應之邊界點。令求解 2' tan 2
之二次式判別式為零時 可得到d 之四次式,而其係數為
1 之
1 函數,求得( , )之點後再利用虛擬
2
2
22 2 2 2 2 2
( , , ) tan o ( , , )
h
g
22 2 2
2
2
2
2
22 2 2 2 2 2
( , , ) ( , , ) h
h
2
2
2 h(
2, 2, 2)
2
2
o
2 2 2
( ,
, )
1min( , , )
f f
1max( , , )
2 min
2 maxtan 2
1max2 2
1min S P1 1 S Q1 1 2 S P S Q cos(1 1 1 1 1max)
l
, ,d
1
1
21 1 1min
P Q
l
2
1 3 2 3 3
D t D t D
3
3 tan
t
2
3
3
3
3D
3 d1d1
1d1
110
機器人之反位移分析求得對應之邊界 點。
當式(13)之兩個根相等時形成第二類 奇異點。N 次多項式之重根條件可由 史坦定理(Sturm’s theorem)導出,目前 已經有方法求得最後一個史坦函數,
當此函數為 0 時四次式之兩個實根會 相等。本文將利用史坦函數求得相關 之邊界曲線。
圖 6 中 B4B5線段為第一或第二類 型所構成之奇異點所構成,當機器人 位於一奇異點時兩組反位移解相同,
因此在
B 點改由虛擬機器人求得最後
5 之線段B B 時,必須選擇正確之反位
5 1 移解,否則曲線無法回到出發點E 。
1 如何選擇正確之組合可由虛擬機器人 判別式之正負號,以及並聯機器人反 位移分析之兩個tan 22
(即式(13)中之 兩解)大小判定。由其他拘束條件所形成之方程式 包括二次式、四次式以及更複雜之方 程式。由二次式所形成之邊界點可輕 易求得,四次式理論上亦可以解方程 式求得,但是四次式有時無法得到實 數解,有時會得到其他組之解,因此 本文另外提出以二分法為基礎之搜尋 法,求得除解二次式以外之邊界曲線,
以下以 S 接頭軸位移限制所形成之邊 界曲線說明。當圖 3-6 中之曲線到達
B
3時,此點已經到達 S 接頭之極限位 置,下一個邊界點可利用二分法配合 極座標搜尋:(26) 其中 '及
'
為圖 6 之分支點B 。重複
3步驟(i)令uuu; (ii)以新的(
)
, , 0 作球窩接頭到達極限位置之鏈之反位 移分析; (iii)計算球窩接頭上兩個參考 點之間距離,直到得到兩個長度l 及
al
b 滿足方程式(l
al
min)(l
b l
min) 。其次0 以對應的兩個 及 利用二分法求得使得 即可求得下一個邊界
點之 及 。類似之方法可求得 第二類奇異點所形成之下一個邊界點,
至於其他拘束條件之下一個邊界點可 由解四次式獲得。得兩個初始點之後,
其他點可由圖 8 所示之搜尋法求得。
其中
A 為圖 6 中之
1B ,而
3A 則為下一
2 個邊界點。首先求得切線向量2 1
2 1
A A
t A A
= 。接著利用法向量
= 求得以下三個參考點:
2 1
2
2 a
b a
c a
H A t
H H n
H H n
(27)
其中 及 表示為對應方向上之增量。
若 及 計算對應之長度
l 及 滿
a足 < 0,則可利用二
分法求得邊界點
A 。若
3 及 計算 對應之長度l 及 不滿足
a< 0 時,則改
H 及
aH 求得
cA 。重複以上步驟直到邊界曲
3 線到達新的分支點。3.5 求得工作空間之步驟
無論使用任何拘束方程式均必須 進行反位移分析以確定得到合理解。
判斷軸位移 qi 是否超出軸位移限制 qimax 及 qimin 可以下式判斷:
(28) cos
sin u
u
u
au
bu
l
1min l
,
o[
t t
x y]tn [
t t
y x]t1 2
Ha Hb
l
b1min 1min
(
l
al
)(l
bl
)Ha Hb lb
1min 1min
(
l
al
)(l
bl
)max min
(
q
iq
i )(q
iq
i )
11
當 < 0 則位於位移限制內,,若 =0 則到達邊界。而球窩接頭之限制可以 式(25)判斷。以下之規則可用來判斷是 否需改變拘束方程式以繪製一下邊界 曲線:
1. 當驅動軸到達極限位置時,以虛擬 機器人求得邊界曲線。
2. 當非驅動軸到達極限位置時,以非 驅動軸極限之拘束方程式求得邊 界曲線。
3. 當虛擬機器人反位移解轉換為虛 根時,以第一類型奇異點方程式求 得邊界曲線。
4. 當式(13)中之兩個根轉換為虛根時,
利用第二類型奇異點之搜尋法求 得邊界曲線。
決定工作空間時,首先由
0
出 發,並以上述之方法求得到面上之邊 界曲線,其次重複
以得到其
他剖面上之邊界曲線。一個剖面上邊 界曲線之數據可儲存起來以加速搜尋 下一個邊界曲線,例如曲線到達一分 支點時有兩個可能的運動方向,而球 窩接頭及第二類奇異點則必需以全域 搜尋才能決定方向,因此前一剖面之 方向記錄起來可以加速決定下一個剖 面相關分支點之運動方向。因為 與
0
0
兩剖面具有相同之面積,因此執 行至
0
即可終止程式,若進行中出 現面積為零之剖面,則由 往反方向
0 推導直到到達另一面積為零之剖面為 止,即可得到方位工作空間,圖 9 所 示為一 3-CSR 機器人之方位工作空間。(註:因描述所有座標系、連桿參數及 各軸位移限制佔太多篇幅,故未提供) 3. 6 CRS 並聯機器人
圖 10 為一 3-CRS 機器人之一 CRS 鏈,
其中 S1相對於 F1座標系之座標可表示 為:
(29)
其中7S1為常數,
S 對應於
1F 之座標亦
1 可由驅動軸d 、
1 及非驅動軸位移
1
2 利用 D-H 矩陣之乘機求得:(30)
對於滿足 = 0 之 CRS 鏈由 z 分量可得到 = d1之方程式。將軸
位移限制 或 代入,可得六條
方程式 = 0 , i = 1, 2,
, 6,。其方程式可轉換為 之二次多
項式,其係數為 及 之函數。將式(30) 之 x,y 分量平方相加,得:
=
(31) 將所得解帶回式(30)之 x 及 y 分量,即 可求得對應之
解。每一個鏈之反位
1 移解皆有兩組解,此兩組解可將式(31) 化為二次式後由其判別式判別。將式 (30)整理為(32)
之後將 x,y 分量平方再相加後,可得到 與式(31)類似,但只含
1之方程式。將
1 1 1
1 1 1
1 1 1
1
1
x y z
s s s
o 7
o 7
s T T s
1 1 1
1 1
1
0 0 0
1 1
x y z
s s s
1 2
A A
1
d
2
1
s1z
d1max d1min ( , , ) fpi
tan 2
t
1 2 1 2
1x 1y
s
s
a12a222a a1 2cos
21 1 1
1 1
1 1
1
0 0 0
1 1
x y z
s s s
A2 A
12
2max,
2 min代入式(31),以及
1max,
1min 代入只含 之方程式後可得到四條拘
1 束方程式,因此三鏈共可得到 12 條對 應於旋轉接頭之拘束方程式。當非驅 動旋轉軸到達 或 時,到達奇異 點位置,但因連桿干涉現象使得,此 旋轉軸無法到達 。將 代入
2 0 至非驅動軸拘束方程式共可得 3 條方 程式,這些方程式均可化為四次多項 式。除了球窩接頭所形成之邊界需使 用式(25)並配合搜尋法求得之外,共有 由平移軸位移限制產生之六條二次式,
以及由旋轉軸接頭及奇異點所產生之 十五條四次式。一剖面上之封閉曲線 可用以下步驟求得(i)求解一拘束方程 式 (ii)由所得之 ( , , )
作反位移分析;(iii)若有任何接頭超越極限位置或反 位移得到虛數解(即到達奇異點時)則 改變拘束方程式; (iv)重複以上三個步 驟,直至得到一封閉曲線為止。至於 求得全部工作空間之步驟與求得 3-CSR 工作空間之方法相同。
4. 結論
此計畫首先利用變更連桿參數之 方法簡化六自由度工業機器人反位移 分析之公式,其次利用三角函數轉換 提出可利用反位移分析公式直接判斷 與奇異點接近程度之指數。提出之指 數皆產生介於 0 與 1 之值,當指數為 0 時代表機器人已經到達奇異點;而指 數為 1 時,則位於離奇異點最遠之位 置。此部分之研究成果與此計畫之預 期研究成果相同。
在六自由度並聯式機器人方面提 出利用虛擬串聯機器人求得 3-CSR 機 器人方位工作空間之方法。理論上可 由解二次式求得方位工作空間,但是 此方法需要以目視法得到三鏈所產生 空間之交集以判定真正之方位工作空 間,因此計畫中另外提出不需利用目 視法之方法。除了驅動軸位移限制之 外,還考慮到非驅動軸位移限制及奇 異點對於方位工作空間之影響,導出 之方法利用可應用於球窩接頭不置於 地面或平台上之各類型機器人。計畫 中另外提出求得 3-CRS 機器人方位工 作空間之方法,此方法可延伸到所有 球窩接頭置於平台上之各類三鏈機器 人,因為驅動方面之問題球窩接頭很 少置於地面。因此本計畫所提出之方 法原則上可用於絕大部分之三鏈六自 由度並聯式機器人。
References
1. K. H. Hunt, “Special Confuguration of Robot Arm via Screw Theory, Part1: The Jacobian and Its Matrix of Cofactors,” Robotica, Vol.
4,(1986) 171-179
2. D. E. Orin and W. W. Schrader,
“Efficient Computation of the Jacobian for Robot Manipulator,”
International Journal Robotics Research., Vol. 3,No. 4,(1984) 66-75.
3. F. T. Cheng, T. L. Hour, Y. Y. Sun, and T. H. Chen, Study and
Resolution of Singularties for a 6-DOD PUMA Manipulator, IEEE 0 180
180
13
Transactions on Systems, Man, and Cyberntics-Part B: Cybernetics, Vol.
27, (2), (1997) 332-343.
4. S. Chiaverini and O, Egeland, A solution to the singularity problem for six-joint manipulators, IEEE International Conference on Robotics and Automation.
5. J. Kieffer, A view of singularties in manipulator inverse kinematics, Advanced Robotics, Robots in Unstructured Environments, Vol. 1, (1991) 668-671
6. A. Karger, Singulaity analysis of the serial robot-manipulators, Journal of Mechanical Design, Transactions of the ASME, Vol. 118, (1996)
520-525.
7. S. L. Wang and K. J. Waldron, A study of the Singular Configurations of Serial Manipulators, Journal of mechanisms, transmissions, and automation in design, Vol. 109, (1), (1987) 14-20.
8. K. J. Waldron, S. L. Wang and S.
JABolin, A Study of the Jacobian Matrix of Serial Manipulators, Journal of mechanisms,
transmissions, and automation in design, Vol. 107, (2), (1985) 230-237.
9. Yu-Che Chen and C.L. P. Chen , An Analysis to the Singularity of Serial Manipulators Using the Theory of
Reciprocal Screw, IEEE
International Conference on Systems, Man, and Cybernetics : Humans, Information and Technology, vol. 1, (1994) 148 – 153
10. Doik Kim, Wankyun Chung and Youngil Youm, Singularity Analysis of 6-DOF Manipulators with the Analytical Representation of the eterminant, IEEE International Conference on Robotics and
Automation, vol. 2, (1999) 889 -894.
11. D. Kohli, S.H. Lee, K. Y. Tsai, G. N.
Sandor, Manipulator configurations based on rotary-linear actuators and their direct and inverse kinematics, ASME Journal of Mechanisms, Transmissions, and Automation in Design, 110 (4) (1988) 397-404.
12. L. W. Tsai, F. Tahmasebi, Synthesis and analysis of a new class of six-degree-of-freedom parallel minimanipulators, Journal of Robotic Systems, 10 (5) (1993) 561-580.
13. F. Tahmasebi, L. W. Tsai, Closed-form direct kiematics solution of a new parallel
manipulator, Journal of Mechanical Design, 116 (1994) 1141-1147.
14. F. Tahmasebi, L. W. Tsai, On the stiffness of a novel six-DOF parallel manipulator, Intelligent Automation and Soft Computing, Proceeding of the First World Automation
Congress, vol. 2 (1994) 189-194.
14
15. J. Angeles, G. Yang, I. M. Chen, Singularity analysis of three-legged, six-DOF platform manipulators with RRRS legs, IEEE/ASME
International Conference on
Advanced Intelligent Mechatronics, AIM, vol.1, (2001) 32-36.
16. G. Yang, I. M. Chen, W. Lin, J.
Angeles, Singularity analysis of three-legged parallel robots based on passive-joint velocities, IEEE
International Conference on Robotics and Automation, vol.3, (2001) 2407-2412.
圖 1 修正連桿參數
圖 2 3-CRS 機器人(
F
i x
iy
i z
i)15
圖 3 CSR 鏈
圖 4 不同驅動軸位移的兩個解軌跡
(a) 建置於平台上之一 3R 虛擬機器人 (b) Z-Y-X 尤拉角 圖 5 3-CRS 虛擬機器人及 Z-Y-X 尤拉角
16
圖 6 工作空間之某一剖面上之邊界曲線
圖 7 球窩接頭到達極限位置示意圖
圖 8 邊界曲線搜尋法
17
圖 9 3-CSR 機器人之方位工作空間
圖 10 CRS 鏈
無研發成果推廣資料
100 年度專題研究計畫研究成果彙整表
計畫主持人:蔡高岳 計畫編號:100-2221-E-011-044- 計畫名稱:二次多項式在機器人奇異點及工作空間分析上之應用
量化
成果項目 實際已達成
數(被接受 或已發表)
預期總達成 數(含實際已
達成數)
本計畫實 際貢獻百
分比
單位
備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ...
等)
期刊論文 0 0 100%
研究報告/技術報告 0 0 100%
研討會論文 0 0 100%
論文著作 篇
專書 0 0 100%
申請中件數 0 0 100%
專利 已獲得件數 0 0 100% 件
件數 0 0 100% 件
技術移轉
權利金 0 0 100% 千元
碩士生 0 0 100%
博士生 0 0 100%
博士後研究員 0 0 100%
國內
參與計畫人力
(本國籍)
專任助理 0 0 100%
人次
期刊論文 0 0 100%
研究報告/技術報告 0 0 100%
研討會論文 0 0 100%
論文著作 篇
專書 0 0 100% 章/本
申請中件數 0 0 100%
專利 已獲得件數 0 0 100% 件
件數 0 0 100% 件
技術移轉
權利金 0 0 100% 千元
碩士生 0 0 100%
博士生 0 0 100%
博士後研究員 0 0 100%
國外
參與計畫人力
(外國籍)
專任助理 0 0 100%
人次
其他成果
(
無法以量化表達之成 果如辦理學術活動、獲 得獎項、重要國際合 作、研究成果國際影響 力及其他協助產業技 術發展之具體效益事 項等,請以文字敘述填 列。)無
成果項目 量化 名稱或內容性質簡述
測驗工具(含質性與量性) 0
課程/模組 0
電腦及網路系統或工具 0
教材 0
舉辦之活動/競賽 0
研討會/工作坊 0
電子報、網站 0
科 教 處 計 畫 加 填 項
目 計畫成果推廣之參與(閱聽)人數 0