國立臺灣大學工學院環境工程學研究所 碩士論文
Graduate Institute of Environmental Engineering College of Engineering
National Taiwan University Master Thesis
應用支援向量回歸於河川洪水預警之研究
——以朴子溪爲例
Application of Support Vector Regression in Flood Forecast —— Taking the Puzi River as an Example
薛天一 Tian-Yi Xue
指導教授:駱尚廉 教授 Advisor:Prof. Shang-Lien Lo
中華民國 109 年 7 月
July, 2020
誌谢
回顧過去兩年的學習生涯,首先要謝謝我的指導教授駱尚廉老師。從平時的課 程到碩論研究,老師對於學生的想法特別寬容。無論我提出的問題大小與否,老師 一樣會耐心細緻地解答並給予建議,偶爾與同學們分享的人生經驗和待人處事方 式也讓我受益良多。論文口試期間內,十分感謝林逸彬教授以及宜蘭大學環工系林 進榮教授百忙之中抽空參與,讓此篇碩士論文更臻于完善,在此表示深摯的謝忱。
就讀研究所的兩年時光裡,少不了駱家班、環工所同學、老師們的幫助。確定 研究方向時雅順提出了不少建議;曉芸、俊華、一丁、越東在我無法返校的日子裡 經常關心近況;口試前夕心潔、風光不斷為我加油打氣,在此一倂表示感謝,祝各 位未來順心順意。
另外在學校也受到藝霓非常非常多的照顧,不斷為我分擔煩惱、難過和各種糟 糕情緒,真的太感謝啦。也謝謝寧宇在論文撰寫時互相勉勵,生活中相互扶持,能 碰到這麼好的室友真是非常幸運,以後也要多多聯絡。
當然還有臺北的仲倫、孟庭;花蓮的玟澔;廣州的昀燁和高中同學,意銘和中 大電信院學生會網宣部的朋友,天偉、媛媛、古典和大院的好朋友;古来的宗信;
吉隆玻的偉恩;福州的俊維;交大的孟勲;西安大略大學的郭洋;上海海事大學的 勇志;明尼蘇達大學的澤南;洛杉磯加大的寶文。謝謝各位一直以來的關照和肯定,
下次聚會我做東。
最後也是最想感謝的是我的父母與家人,你們的支持讓遠赴異鄉讀書的我後顧 無憂,可以全心全意地投身學習,希望我的努力也會給你們帶來喜悅!
摘要
臺灣屬於副熱帶溼潤氣候,夏季雨量充沛,河川逕流量較大。在 2018 年的 823 水災中,部分低窪地區遭遇了洪水及淹水問題,帶來負面影響,其中便包括了朴子 溪流域的嘉義縣市。因此,本研究利用嘉義朴子溪流域過往之水位及降雨資料,建 立支援向量回歸、灰色水位、線性回歸三種水位預測模式,並嘗試在不處理原始資 料雜訊的前提下進行河川水位預測,以期判斷各模式是否可用於快速提供當地洪 水預警。
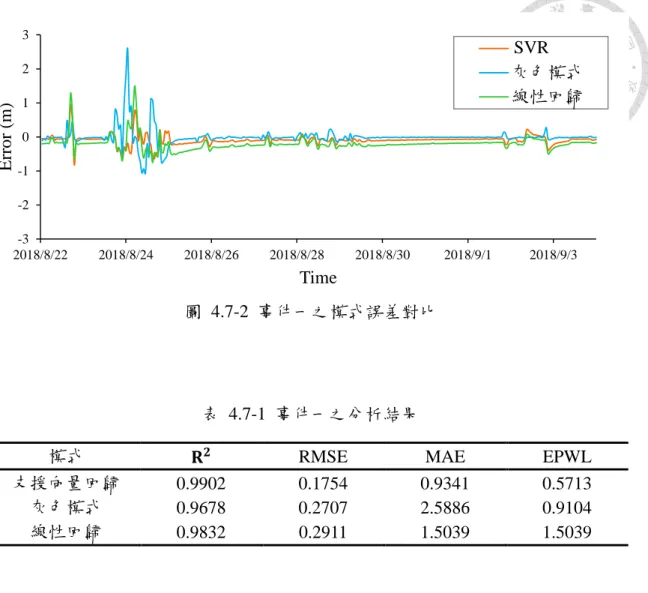
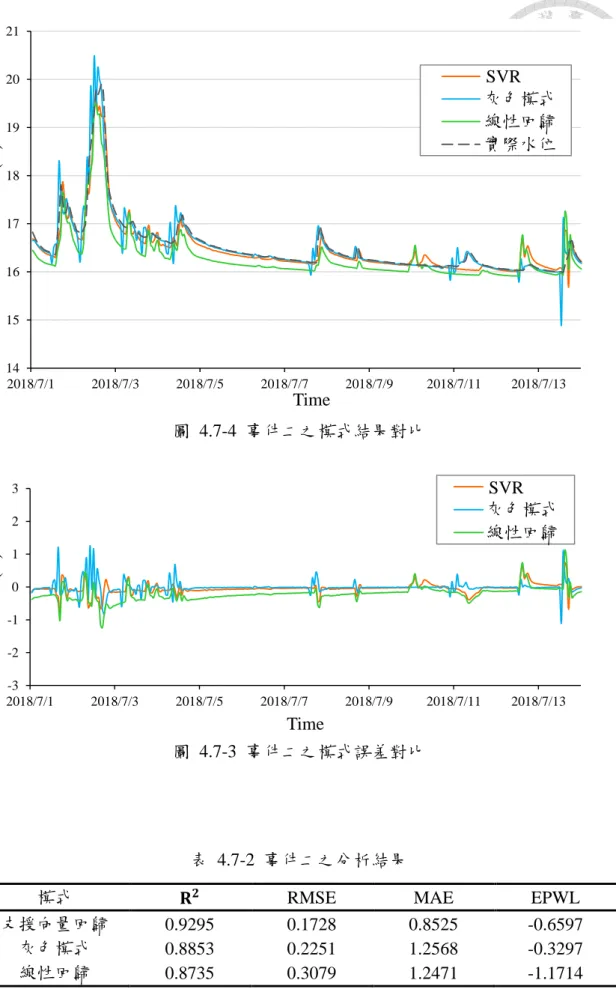
本研究使用朴子溪流域牛稠溪橋(1)、竹崎、番路三個測站 2017 年一整年之水 位、降雨資料率定模式,使用 2018 年三場降雨事件分別作驗證,其中包括了 823 水災。研究先確定洪峰延滯時間為 3 小時,並以此作爲預警時間。而後建立支援向 量回歸、灰色水位、線性回歸三種模式分別預測三場降雨事件,以事件一爲例,支 援向量回歸的決定係數、均方根誤差、最大絕對誤差、尖峰水位誤差均爲最佳,分 別為 0.9902、0.1754、0.9341、0.5713。再根據三場預測得到各糢式之總體決定係 數,分別爲 0.9741、0.9434、0.9560。經由對比三種模式後得到,各模式都可在一 定程度上預測河川水位高度,其中以支援向量回歸為最優,其健壯性(Robustness)
相對另外兩種模式較佳。
關鍵字:洪水預警、水位預測、支援向量回歸、灰色模式、朴子溪
Abstract
Due to the humid subtropical, Taiwan receives abundant precipitation throughout the summer, which result a high river discharge. In the 823 flood disaster, many low-lying areas experience flooding during heavy rains, including Chiayi county in Puzi River Basin. In this study, three models are utilized for forecasting: Support Vector Regression, Gray Model, Linear Regression. Values of input data was not denoised, in order to provide flood warning as fast as possible. The purpose of this study is to construct a quickly water stage forecasting model at Puzi River.
In this study, water stage and precipitation of the 1550H017, C0M700, C0M720 station during 2017 is used to establish the models, and three rainfall events from 2018 is used to verification, including the 823 flood disaster. At first, determine lag time of 3 hours as early warning time. Then, establishing Support Vector Regression, Gray Model, Linear Regression model, forecasting three rainfall events. Take Event One as an example, the R2 (Coefficient of determination), RMSE(Root mean square error), MAE (Maximum absolute error) and EPWL (Error of peak water level) of Support Vector Regression are the best, which are 0.9902, 0.1754, 0.9341 and 0.5713, respectively. In addition, the overall R2 of each formula are 0.9741, 0.9434 and 0.9560, respectively.
By comparing the three models, the water stage prediction model of Support Vector Regression is more effective in predicting river water level, and its robustness is stronger than the other two models.
Keywords: Flood Warning、Water Stage Forecast、Support Vector Regression、
Gray Model、Puzi River
目錄
第一章 前言 ... 1
1.1 研究緣起 ... 1
1.2 研究目的 ... 2
第二章 研究背景與文獻回顧 ... 3
2.1 研究區域地文條件概述 ... 3
2.2 研究區域氣象水文資料概述 ... 4
2.3 支援向量回歸 ... 6
2.4 灰色系統理論 ... 7
2.5 線性回歸 ... 11
2.6 模式研究回顧 ... 11
第三章 研究方法與過程 ... 13
3.1 研究區域與暴雨事件之選取 ... 13
3.2 支援向量回歸水位預測模式 ... 16
3.3 灰色水位預測模式 ... 21
3.4 線性回歸預測模式 ... 25
3.5 水位傳播時間 ... 26
3.6 模式評鑒指標 ... 28
第四章 結果與討論 ... 30
4.1 模式運行環境 ... 30
4.2 模式率定資料概述 ... 30
4.3 模式預測資料概述 ... 33
4.4 支援向量回歸預測結果 ... 35
4.5 灰色水位預測結果 ... 39
4.6 線性回歸預測結果 ... 42
4.7 三種模式之比較 ... 45
第五章 結論 ... 52
5.1 結論 ... 52
5.2 建議 ... 52
參考文獻 ... 54
表目錄
表 2.2-1 研究區域歷年平均降雨量與平均流量 ... 5
表 3.1-1 流域內之水位測站 ... 13
表 3.1-2 流域及周邊之雨量測站 ... 14
表 3.1-3 研究使用之水位及雨量測站資料 ... 15
表 3.1-4 研究使用之預測驗證事件 ... 16
表 3.5-1 水位傳播時間相關性分析 ... 27
表 4.2-1 原始資料分析 ... 33
表 4.3-1 待預測事件之降雨量分析 ... 35
表 4.3-2 待預測水位資料分析 ... 35
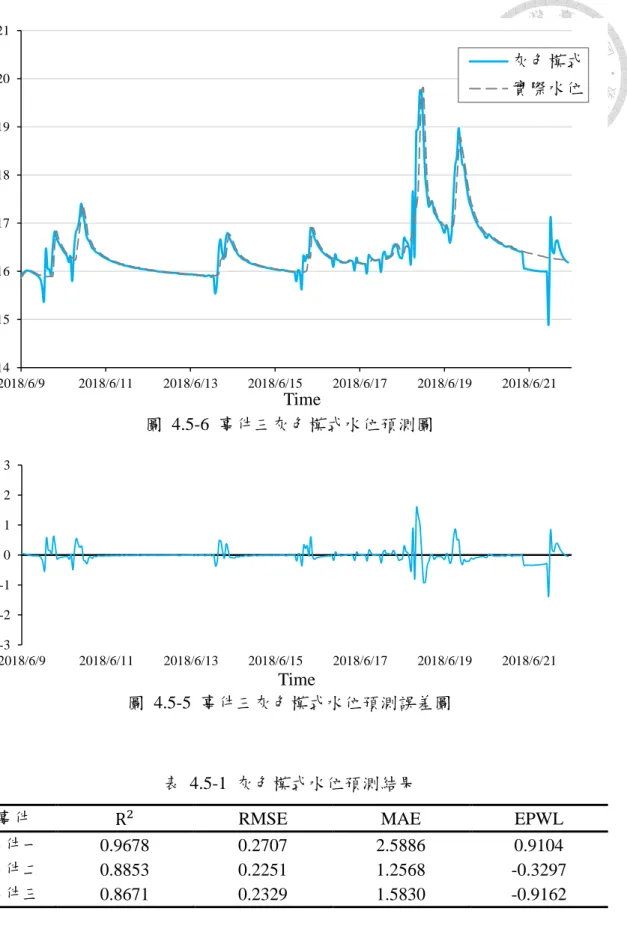
表 4.4-1 支援向量回歸水位預測結果 ... 38
表 4.5-1 灰色模式水位預測結果 ... 41
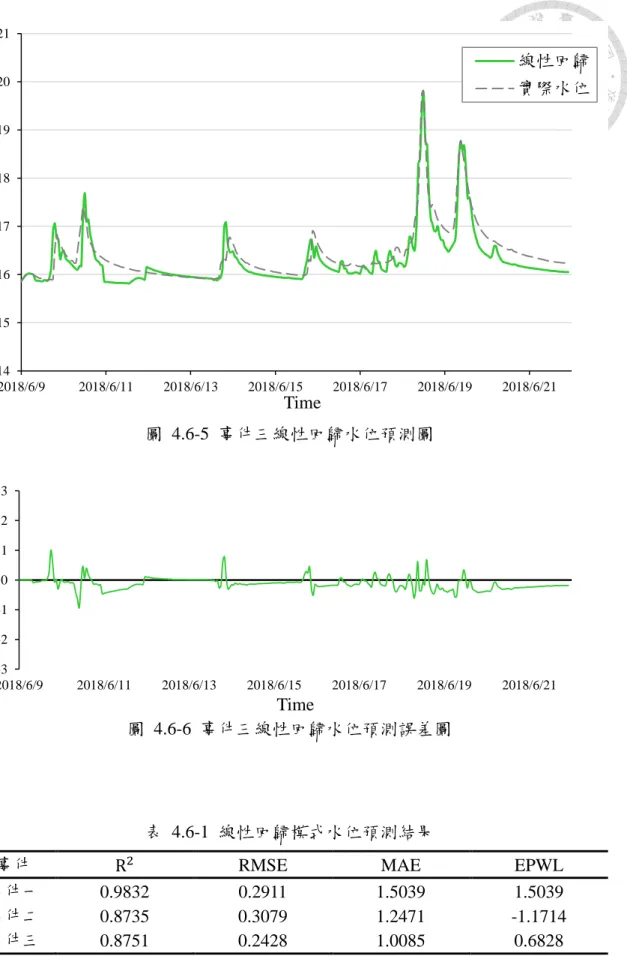
表 4.6-1 線性回歸模式水位預測結果 ... 44
表 4.7-1 事件一之分析結果 ... 46
表 4.7-2 事件二之分析結果 ... 47
表 4.7-3 事件三之分析結果 ... 49
圖目錄
圖 2.1-1 朴子溪流域圖 ... 3
圖 2.2-1 歷年颱風侵襲路逕與概率 ... 5
圖 2.3-1 支援向量預測流程圖 ... 7
圖 2.4-1 灰色預測流程圖 ... 8
圖 3.1-1 朴子溪流域之水位及雨量測站位置圖 ... 13
圖 3.1-2 研究使用之水位及雨量測站位置圖 ... 15
圖 3.2-1 線性回歸與支援向量回歸之比較 ... 18
圖 3.2-2 線性回歸與支援向量回歸之損失函數比較 ... 18
圖 3.2-3 非線性支援向量回歸架構示意圖 ... 21
圖 4.2-1 番路雨量測站 2017 全年之日降雨量 ... 31
圖 4.2-2 牛稠溪橋(1)測站 2017 全年之水位高度 ... 31
圖 4.2-3 竹崎雨量測站 2017 全年之日降雨量 ... 32
圖 4.2-4 流域上游 2017 全年之平均日降雨量 ... 32
圖 4.3-1 事件一之降雨量與水位關係圖 ... 33
圖 4.3-2 事件二之降雨量與水位關係圖 ... 34
圖 4.3-3 事件三之降雨量與水位關係圖 ... 34
圖 4.4-1 事件一支援向量回歸水位預測誤差圖 ... 36
圖 4.4-2 事件一支援向量回歸水位預測圖 ... 36
圖 4.4-3 事件二支援向量回歸水位預測誤差圖 ... 37
圖 4.4-4 事件二支援向量回歸水位預測圖 ... 37
圖 4.4-5 事件三支援向量回歸水位預測誤差圖 ... 38
圖 4.4-6 事件三支援向量回歸水位預測圖 ... 38
圖 4.5-1 事件一灰色模式水位預測圖 ... 39
圖 4.5-2 事件二灰色模式水位預測圖 ... 40
圖 4.5-3 事件二灰色模式水位預測誤差圖 ... 40
圖 4.5-4 事件一灰色模式水位預測誤差圖 ... 40
圖 4.5-5 事件三灰色模式水位預測誤差圖 ... 41
圖 4.5-6 事件三灰色模式水位預測圖 ... 41
圖 4.6-1 事件一線性回歸水位預測圖 ... 42
圖 4.6-2 事件二線性回歸水位預測圖 ... 43
圖 4.6-3 事件一線性回歸水位預測誤差圖 ... 43
圖 4.6-4 事件二線性回歸水位預測誤差圖 ... 43
圖 4.6-5 事件三線性回歸水位預測圖 ... 44
圖 4.6-6 事件三線性回歸水位預測誤差圖 ... 44
圖 4.7-1 事件一之模式結果對比 ... 45
圖 4.7-2 事件一之模式誤差對比 ... 46
圖 4.7-3 事件二之模式誤差對比 ... 47
圖 4.7-4 事件二之模式結果對比 ... 47
圖 4.7-5 事件三之模式結果對比 ... 48
圖 4.7-6 事件三之模式誤差對比 ... 48
圖 4.7-7 支援向量回歸模式預測值與觀測值之散布圖 ... 50
圖 4.7-8 灰色模式預測值與觀測值之散布圖 ... 50
圖 4.7-9 線性回歸預測值與觀測值之散布圖 ... 51
第一章 前言
1.1 研究緣起
洪水是常見的自然災害之一,常常會帶來一定經濟損失並有可能導致民眾傷亡,
對世界許多地區都產生了一定的負面影響。臺灣地處亞洲東部,屬於亞熱帶海島型 氣候,雨量充沛,且降雨大多集中於夏、秋兩季。由於臺灣河川大多流短坡陡,每 暴雨侵襲與颱風來臨,河川逕流量大大增加,將可能對流域的低窪地區帶來淹水影 響。近年來,全球變暖導致極端降雨事件的頻率和強度增加,又使得洪災發生的頻 率變高。此外,城市化過程會改變土地表面特性,並使得人口和個人財產集中在較 小區域內,導致洪水所產生的潛在風險增加。尋找一套合理的預測方式,對於水利 管理與災害防控具有重要意義(王如意、易任,1979)。
在自然過程中,洪水流量會涉及暴雨降雨量、強度、延時、面積與途逕。傳統 水文預報方式是通過水位轉換建立降雨-逕流模式,利用歷史降雨事件之流量率定 曲線計算逕流量,再將逕流量轉換為水位。但由於高流量資料較少,需採用外插法 補足;同時由於泥沙淤積,河道斷面改變也會增加不確定性。河川水位是指河川某 點之水面與一基準點(如海平面)比較之高度差,其尖峰水位可以作為防洪參考,
最低水位則決定了灌溉、給水的限制。在災害應變實務中,相關單位常採用水位作 為預警參考。
支援向量回歸(Support Vector Regression, SVR)屬於資料驅動模式,可使用較 少資料進行即時預報,對於非線性及隨機性等特徵具有良好適應能力(Vapnik et al., 1997)。
灰色系統理論(Grey System Theory)則是水文學中較為傳統的預測方式之一,
主要探討在訊息不完整的情況下,如何將問題簡化為數學模式進行分析,而不考慮 其物理過程(鄧聚龍、郭洪,1996)。洪水預報所使用的雨量、水位資料十分有限,
需要快速計算且可以適當捨棄精確度,符合灰色系統的處理要求。
線性回歸(Linear Regression)是最常見的回歸模式之一,原理為通過找出一個 可以描述資料集的線性方程式,藉此預測未來的資料。在本研究中,用以代表過度 簡化的數學模式,以期觀察簡化是否會帶來誤差。
因此本研究希望藉由分析朴子溪上游之降雨量資料,透過不同時期降雨及水位 相關性推估出洪峰延滯時間,再以數學模式分析洪水水位與降雨之關聯性,並評估 支援向量回歸與傳統灰色模式以及線性回歸方式間存在的差異。
1.2 研究目的
本研究利用朴子溪上游流域之降雨量資料,以灰色模式、支援向量回歸、線性 回歸三種方式對嘉義市牛稠溪橋測站之水位進行推估,計算程式模擬數值與實際 量測值的差異,評估模式可靠性並與傳統的灰色模式作出對比。
第二章 研究背景與文獻回顧
2.1 研究區域地文條件概述
本研究之研究區域為朴子溪流域。朴子溪位於臺灣南部,流經嘉義縣境,主流 長度 75.87 公里,流域面積 426.60 平方公里。分為平原區(面積 305 平方公里,佔 全流域面積 72%)、丘陵區(面積 76 平方公里,佔全流域面積 18%)及山地區(面 積 46 平方公里,佔全流域面積 11%)三部份(第五河川局,2019)。北臨北港溪 流域,南臨八掌溪流域,介於東經121°90’~120°40’,北緯 23°25’~23°30’之間。
(資料來源:内政部國土測繪中心、經濟部水利署)
朴子溪主流上游名為牛稠溪,因流經民雄鄉牛稠山而得名,發源於標高 1421 公尺的阿里山山脈四天王山芋菜坑。上游水面平均寬約 20 公尺,流速較快,棲地
圖 2.1-1 朴子溪流域圖
型態豐富,分爲深流、淺瀨及淺流。河床底質以卵石、礫石為主,灘地多為林地,
周邊區域有種植香蕉、火龍果、檳榔及稻田(第五河川局,2017)。
中游河段之區域大約爲嘉義市、民雄鄉邊界至太保市、新港鄉交界處,河川在 月眉潭(地名)附近始稱朴子溪。此段河段之水面平均寬約 50 公尺,流速緩慢,
棲地型態多為淺流及深流。河床底質以沉積泥砂為主,河床中有砂洲淤積,高灘地 則為林地。在此河段中,河道兩側已設置防洪堤防,有零星住宅與工廠,種植作物 主要爲稻米及番茄。(第五河川局,2017)。
河口位於於東石鄉的東石大橋附近,水面寬平均約 165 公尺,因河道寬廣所以 河水流速緩慢,棲地型態多為淺流。河口有砂洲淤積,河床底質以沉積泥砂為主,
兩側灘地有紅樹林。下游河段的河道兩側已設置堤防,部分堤面目前已採植生綠化 工法,並於堤頂設置了涼亭,供周邊民眾休憩使用,左右岸環境多為魚塭,並有零 星住宅(第五河川局,2017)。
2.2 研究區域氣象水文資料概述
朴子溪流域位於北回歸線附近,地處亞熱帶。受降水時空分佈不均影響,河川 流量變化大,夏季為豐水期,冬季為枯水期。
以嘉義站與牛稠溪橋(1)測站為例,流域全年平均降水量約為 148.86 mm,中游 河道年平均流量為 9.22 CMS。從歷史記錄來看,一般每年從四月開始,降雨量逐 月上升,其中以六至九月降雨量最高,直至十月降水量才又逐漸下降。河川流量的 變化類似,六至八月到達最高值,十一月至次年四月份的流量較低,如表 2.2-1 所 示。
同時流域也面臨颱風侵襲問題,中央氣象局(2015)依據 1897~2014 年颱風 資料進行統計分析,將侵襲臺灣颱風路逕分為九類,如圖 2.2-1 所示。其中第 3 類路逕之颱風將直接侵襲本研究區域,占比約 11%。除此之外,第 2、4、7、8、
9 類路逕之颱風占比約 40%,亦會影響朴子溪流域的降雨量。
表 2.2-1 研究區域歷年平均降雨量與平均流量
(資料來源:内政部國土測繪中心、中央氣象局)
項目 平均降水量(mm) 平均流量(CMS)
月份 嘉義 阿里山 牛稠溪橋(1) 灣內橋
一月 23.6 71.7 2.69 4.15
二月 57.4 137.3 1.45 4.99
三月 63.4 166.5 2.22 5.49
四月 103 254.2 3.22 7.22
五月 176.2 493.6 2.52 11.24
六月 314 649.6 27.88 23.03
七月 369.9 668.3 27.62 30.36
八月 380.2 809.3 25.37 44.54
九月 222.6 432.9 10.1 23
十月 27.5 146.7 4.12 10.16
十一月 15.2 46.3 1.81 6.38
十二月 21.3 55.9 1.61 4.96
合計 1774.3 3932.3 110.61 175.52
統計期間 1981-2010 1981-2010 2016-2019 1994-2019
圖 2.2-1 歷年颱風侵襲路逕與概率
2.3 支援向量回歸
支援向量回歸源自於支援向量機(Support Vector Machine, SVM)理論,支援 向量機屬於一種基於機器學習(machine learning)模式,由 Vapnik 於 1963 年提 出 並 不 斷 改 進 發 展 。 Vapnik and Corinna Cortes (1995) 利 用 風 險 最 小 化 原 理
(Structured risk minimize),提出軟間隔(Soft margin),此方法可以有效處理標記 無關聯性的錯誤的樣本。
與衆多基於計算機模擬的模式一樣,支援向量回歸可視爲一黑色系統,即不采 用傳統物理、現實邏輯機制建立模式,由計算機負責求解其中的關係(盧瑞山,
2000)。近年來關於支持向量機的研究已趨於成熟,並應用於許多領域,如:生物、
交通、影像辨識、文本分類、資料探勘等。
支援向量回歸屬於支援向量機的延伸應用,回歸是指使用一系列現有的值預測 另一個連續的值,透過不同的不敏感損失函數(Insensitive Loss Function),其求得 的回歸函數也會有所差別。相較於傳統線性回歸使用的最小平方法,支援向量回歸 存在二次損失函數機制,僅需要少量且有用的資料就可以建立決策函數,而傳統線 性回歸則需要利用所有的資料。
支援向量的求解過程引入了拉格朗日乘子(Lagrange multipliers) 𝛼𝑖、𝛼𝑖∗,每 一組乘子分別對應一筆訓練資料,若 𝛼𝑖 − 𝛼𝑖∗ 非零,則表示該筆資料可用來建立 決策函數(Decision function),稱其為「支援向量」(support vector)。簡單來講,支 援向量是指這些可被用來協助、支援、定義決策函數的資料(C. Cortes et al., 1995), 其預測流程如圖 2.3-1 所示。
2.4 灰色系統理論
灰色系統理論最初是由華中理工大學鄧聚龍教授在 1979 年創立,應用於掌握 不完整訊息的通訊系統控制問題。鄧聚龍教授將控制系統分為三類︰第一類是參 數確知的,第二類是參數完全不確知的,第三類是參數部分確知的(鄧聚龍、郭洪, 1996)。其中第三類控制系統,用盡量少的參數、資料控制不完整的系統,建立了 最少訊息模型,此即是「灰色系統」(鄧聚龍, 1982)。「灰色」,相對於「黑」與「白」, 是指系統之訊息不完全、不充分。
灰色系統的定義為:部份訊息已知,內涵架構亦部份已知之系統。主要探討訊 息不完整、關係不明確以及操作機制不明確的系統,著重於參數及結果明確而內涵 不明確問題之研究(鄧聚龍,1999)。水文系統涉及到無數的物理過程,變數頗多,
難以完全依照物理機制來描述,因此在描述一水文系統時,常將其簡化,僅留下最 主要的影響因數,依其物理現象描述。此時研究者並未完全採用水文系統的物理機 制、參數,屬於灰色系統。灰色預測流程可概括爲圖 2.4-1,建立灰色預測模式的 步驟為(吳漢雄等人,1996):
1. 將原始數據作累加生成處理,建立灰微分方程;
資料預處理
建立回歸模式、設立參數 原始問題對偶化 求解拉格朗日乘子
計算預測值 驗證誤差
圖 2.3-1 支援向量預測流程圖
2. 求其數據矩陣和係數向量;
3. 經由灰微分方程求得預測值的累加數列;
4. 經由後項差分還原成預測數據。
以最簡單的 GM (1,1) 模式建立爲例(鄧聚龍, 1996;樊新海等人,2003),GM (1,1) 代表一階微分一個變數之灰模型,GM 為 Gray Model(灰模式)縮寫,第一 個 1 表示一階微分,第二個 1 表示一個變數。,模式建立流程為:
1. 累加生成 (Accumulated Generating Operation,AGO) 假設原始序列表示為 𝑥(0)
𝑥(0) = {𝑥(0)(1), 𝑥(0)(2), 𝑥(0)(3) ⋯ ⋯ 𝑥(0)(𝑡)} (2-1)
一次累加生成的序列 𝑥(1) 可表示為
𝑥(1) = 𝐴𝐺𝑂(𝑥(0)) = {𝑥(1)(1), 𝑥(1)(2), 𝑥(1)(3) ⋯ ⋯ 𝑥(1)(𝑡)} (2-2)
𝑥(1)(𝑡) = ∑𝑡𝑘=1𝑥(0)(𝑘) (2-3)
資料預處理 累加生成(AGO)
均值生成、建立灰差分方程式 建立矩陣模式求解係數向量
計算預測值 驗證誤差
圖 2.4-1 灰色預測流程圖
2. 建立灰模式,GM (1,1) 之微分方程可表示為
𝑑𝑥(1)
𝑑𝑡 + 𝑎𝑥(1) = 𝑏 (2-4)
其中 a、b 為模式參數(常數)
3. 轉換為灰差分方程式
(a) 𝑑𝑥(1)𝑑𝑡(𝑘)= 𝑙𝑖𝑚
Δ𝑡→0
𝑥(1)(𝑘)−𝑥(1)(𝑘−Δ𝑡)
Δ𝑡 (2-5)
對於一離散序列,取 ∆t = 1,則
𝑑𝑥(1)(𝑘)
𝑑𝑡 = 𝑥(1)(𝑘) − 𝑥(1)(𝑘 − 1) = 𝑥(0)(𝑘) (2-6)
(b) 假設 𝑧(1)(𝑘) 為 𝑥(1)(𝑘) 之背景值(鄰近均值),取
𝑧(1)(𝑘) = 0.5 ⋅ (𝑥(1)(𝑘) + 𝑥(1)(𝑘 − 1)) (2-7)
此時可將(2-4)式轉化為灰差分方程式
𝑥(0)(𝑘) + 𝑎 ⋅ 𝑧(1)(𝑘) = 𝑏 (2-8)
由此可知,微分方程式與差分方程式存在對應關係︰
𝑑𝑥(1)(𝑘)
𝑑𝑡 ⇒ 𝑥(0)(𝑘)
𝑥(1)(𝑘) ⇒ 𝑧(1)(𝑘) (2-9)
4. 將(2-8)式轉化為矩陣形式
建立資料矩陣與求解係數向量:
𝑌 =
[
𝑥(0)(2) 𝑥(0)(3) 𝑥(0)(4)
⋅
⋅
⋅ 𝑥(0)(𝑡)]
, 𝐵 =
[
−𝑧(1)(2) 1
−𝑧(1)(3) 1
−𝑧(1)(4) 1
⋅ ⋅
⋅ ⋅
⋅ ⋅
−𝑧(1)(𝑡) 1]
, 𝑎^ = [𝑎
𝑏] (2-10)
其中 𝑌 與 B 為數據矩陣, 𝑎^ 為係數向量。
此時(2-8)式可表示為:𝑌 = 𝐵 ⋅ 𝑎^ 利用最小二乘法求解,則
𝑎^ = (𝐵𝑇𝐵)−1𝐵𝑇𝑌 (2-11)
參數 a、b 即可求得。
5. 求解預測資料(白化響應)
a、b 求得後,代入(2-4)式中,起始條件為
𝑥(1)(1) = 𝑥(0)(1) (2-12)
可得其解:
𝑥(1)(𝑘 + 1) = (𝑥(0)(1) −𝑏𝑎) 𝑒−𝑎𝑘+𝑏𝑎 (2-13)
再將 𝑥(1) 做後項差分還原成 𝑥(0),可得預測數列
𝑥(0)(𝑘 + 1) = 𝑥(1)(𝑘 + 1) − 𝑥(1)(𝑘) (2-14)
解得
𝑥(0)(𝑘 + 1) = (1 − 𝑒𝑎) (𝑥0(1) −𝑏𝑎) 𝑒−𝑎𝑘 (2-15)
2.5 線性回歸
線性回歸是最簡單也是最常見的回歸模式之一,原理為通過找出一個可以描述 資料集的線性方程式,藉此預測未來的資料。每一筆資料與方程式的距離平方稱之 為誤差,線性回歸的目標是將此種誤差降到最低,並以此作為線性方程權重的參考
(Triola, M. F., 2008 與 Torres, R. A., 2013)。
在本研究中,水位與雨量之關聯顯然非線性關係,因此使用簡單線性回歸僅用 以模擬過度簡化的數學模式,以期觀察簡化模型是否會帶來誤差。
2.6 模式研究回顧
K. W. Chau et al. (1999) 對長江上游羅山測站水位進行分析,預測下游漢口站 值變化。研究者使用了基於遺傳演算法(Genetic algorithm-based)的人工神經網路
(Artificial Neural Networks,ANNs)和基於自我調整神經網路(Adaptive-network- based)的模糊理論系統(ANFIS)的模式,並以傳統之線性回歸模式作為對比參照 基準。其結論之一為,基於機器學習演算法之模式相對於傳統數學模式,在離散度 較大的資料集中具有更強之健壯性。限制因數主要為需要大量的輸入參數,和較長 的計算時間。
See, L., and Openshaw, S. (2000) 使用了混合神經網路、模糊理論、時間序列模 式(Autoregressive–moving-average model)以及天真預測(Naïve model 直接用當 前值作爲預測值)建立洪水預報模型,並將其綜合後評估模型性能。結果顯示,加 入模糊理論的貝葉斯模型的總體結果較爲優秀。
CH Wu et al. (2004) 利用支援向量回歸(Support Vector Regression,SVR)建立 基於不同交通工具的行程時間預測模式,同樣也為基於灰色系統之研究。
Pao-Shan Yu et al. (2006) 在前人基礎上定量了洪水之水力停留時間,並採用支 援向量回歸,建立提前 1-6 小時之洪水水位預報模式。結果顯示,支援向量回歸
模式具有與其他模式相同甚至更優秀的性能,並且對輸入變數的滯後不敏感。但作 者認爲支援向量回歸模式不容易理解,特徵空間之非線性映射過程較爲複雜。
Han, D et al. (2007) 使用支援向量機進行洪水預報,並發現過度學習/過度擬合
(Over-fittin)產生的負面影響大於學習不足/低度擬合(Under-fitting)。在同一流 域中,線性與非線性之核函數(Kernel functions)都具有優良性能。
戴淩全等人(2010)利用最小二乘法原理建立水位及流量關係之多項式方程(與 灰色系統相似),分別進行二至四次擬合,模式之平均誤差隨擬合次數增加而減少。
Hosseini,S.M.,& Mahjouri,N.(2016) 將支援向量回歸模式與基於地理環境的人 工神經網路(geomorphologic-based ANN model)結合,建立了新型降雨逕流模式:
SVR-GANN。研究者使用了人工神經網路作為支援向量回歸之核函數,提高了模 式精度,較以往的多種單一模式(ANN-BP、traditional SVR、ANN-GA、ANFIS、
GANN)之預測準確性更高。
E Sharifi Garmdareh et al. (2018) 對伊朗伊朗納馬克湖流域 55 個水文站之 1992-2012 年資料分析,預測洪峰流量。研究者採用 gamma test (GT)、GT plus 分 類與專家意見選擇變數,對比支援向量回歸(SVR)、自我調整神經模糊理論系統
(ANFIS)、人工神經網路(ANN)和非線性回歸(NLR)四種模式之性能。結果 顯示,GT + ANFIS 和 GT + SVR 模型的性能最好,由此可以看出,gamma test 決 定之輸入變數較適合作為水文預報。
閆英男 (2018) 使用灰色系統、BP 神經網路、RBF 神經網路、支援向量回歸 等多種模式進行黑河地下水水位預測,結果表明,以上之模式都可以很好地預測水 位變化趨勢及波動性,若使用混合模式,效果將比起使用單一模式還能得到進一步 提升。
霍文博(2019)分別對中國浙江省、陝西省的 4 個流域使用新安江模型和支援 向量機模型進行即時水位預報,並使用 k-NearestNeighbor 法對新安江模型結果即 時校正。結果表明,新安江模型和支援向量機模型在不同流域洪水預報中各有優勢,
支援向量機模型預報精度受降雨精度影響較大。
第三章 研究方法與過程
3.1 研究區域與暴雨事件之選取
朴子溪流域內共有 6 個水位測站,9 個雨量測站,周邊共有 16 個雨量測站。
水位測站上下游各三個,雨量測站分為局屬測站和自動雨量站,前者的資料監測頻 率更高,分別如圖 3.1-1 及表 3.1-1、3.1-2 所示。
(資料來源:内政部國土測繪中心、經濟部水利署)
表 3.1-1 流域內之水位測站
測站名稱 測站代號 經度 緯度 所屬縣市 所屬鄉鎮
牛稠溪橋(1) 1550H017 120.4432831 23.5135498 嘉義市 東區 東石大橋 1550H018 120.175829 23.45945 嘉義縣 東石鄉 麻魚寮橋 1550H016 120.367981 23.49979019 嘉義縣 太保市 蒜頭 1550H011 120.2912292 23.48080444 嘉義縣 六腳鄉 灣內橋 1550H012 120.3033218 23.49786949 嘉義縣 六腳鄉 仁弘橋 1550H014 120.4815826 23.51259804 嘉義縣 民雄鄉
圖 3.1-1 朴子溪流域之水位及雨量測站位置圖
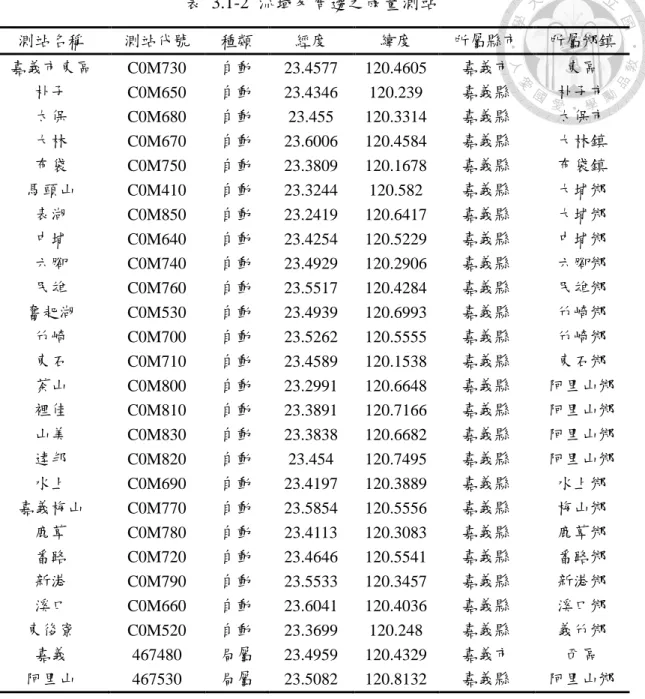
表 3.1-2 流域及周邊之雨量測站
測站名稱 測站代號 種類 經度 緯度 所屬縣市 所屬鄉鎮
嘉義市東區 C0M730 自動 23.4577 120.4605 嘉義市 東區 朴子 C0M650 自動 23.4346 120.239 嘉義縣 朴子市 太保 C0M680 自動 23.455 120.3314 嘉義縣 太保市 大林 C0M670 自動 23.6006 120.4584 嘉義縣 大林鎮 布袋 C0M750 自動 23.3809 120.1678 嘉義縣 布袋鎮 馬頭山 C0M410 自動 23.3244 120.582 嘉義縣 大埔鄉 表湖 C0M850 自動 23.2419 120.6417 嘉義縣 大埔鄉 中埔 C0M640 自動 23.4254 120.5229 嘉義縣 中埔鄉 六腳 C0M740 自動 23.4929 120.2906 嘉義縣 六腳鄉 民雄 C0M760 自動 23.5517 120.4284 嘉義縣 民雄鄉 奮起湖 C0M530 自動 23.4939 120.6993 嘉義縣 竹崎鄉 竹崎 C0M700 自動 23.5262 120.5555 嘉義縣 竹崎鄉 東石 C0M710 自動 23.4589 120.1538 嘉義縣 東石鄉 茶山 C0M800 自動 23.2991 120.6648 嘉義縣 阿里山鄉 裡佳 C0M810 自動 23.3891 120.7166 嘉義縣 阿里山鄉 山美 C0M830 自動 23.3838 120.6682 嘉義縣 阿里山鄉 達邦 C0M820 自動 23.454 120.7495 嘉義縣 阿里山鄉 水上 C0M690 自動 23.4197 120.3889 嘉義縣 水上鄉 嘉義梅山 C0M770 自動 23.5854 120.5556 嘉義縣 梅山鄉 鹿草 C0M780 自動 23.4113 120.3083 嘉義縣 鹿草鄉 番路 C0M720 自動 23.4646 120.5541 嘉義縣 番路鄉 新港 C0M790 自動 23.5533 120.3457 嘉義縣 新港鄉 溪口 C0M660 自動 23.6041 120.4036 嘉義縣 溪口鄉 東後寮 C0M520 自動 23.3699 120.248 嘉義縣 義竹鄉 嘉義 467480 局屬 23.4959 120.4329 嘉義市 西區 阿里山 467530 局屬 23.5082 120.8132 嘉義縣 阿里山鄉
本研究所選取的水位測站是「牛稠溪橋(1)」測站,位於嘉義市的北側邊界處,
較容易體現朴子溪水位變化對市區的影響。為了盡可能測試各模式之健壯性,雨量 站僅選取了「番路 C0M700」、「竹崎 C0M720」兩個距離較近且處於河道上游的測 站,以便分析可能存在的缺陷。水位測站及雨量測站位置、監測頻率等如圖 3.1-2 與表 3.1-3 所示,所使用的資料為 2017 年全年資料。
(資料來源:内政部國土測繪中心、經濟部水利署)
表 3.1-3 研究使用之水位及雨量測站資料
測站種類 名稱 編號 經度 緯度 資料種類 監測頻率 所屬單位
水位測站 牛稠溪
橋(1)
1550H 017
120.
4433 23.5
135
水位、
流量 每 10 分鐘一筆 第五河川 局 自動雨量
站 番路 C0M7
00
120.
5541 23.4
646 雨量 每小時一筆
(1998-2017)或 即時記錄
(2018-)
中央氣象 局 自動雨量
站 竹崎 C0M7
20
120.
5555 23.5
262 雨量 中央氣象
局
其中河川水位測站之資料為每 10 分鐘一筆,本研究因受自動雨量站之資料頻 率限制,採用平均法計算每小時之水位供模式使用。
自動雨量站一般之資料間隔為每小時一次,并且從 2018 年往後的資料中,雨 量站在降雨瞬間會開始記錄數值,時間間隔不固定,本研究將間隔不固定之降雨量 累加,得到每小時降雨量。
圖 3.1-2 研究使用之水位及雨量測站位置圖
局屬雨量站之資料間隔為每分鐘一次,其監測頻率非常高,具有更強之參考意 義,但由於本研究選用之測站未包括局屬雨量站,故僅將預測精度精確到小時,在 後續研究中可以考慮藉此提高模式精確度。
用以驗證預測之降雨則選用了三次 2018 年之降雨事件,事件一為 823 暴雨,
曾引發嘉義地區接近一個月的淹水問題(陳昆懋,2019),後两次則是隨機選取的 一般降雨,如表 3.1-4 所示:
表 3.1-4 研究使用之預測驗證事件
事件 事件說明 資料時間(年-月-日-小時)
事件一 823 暴雨 2018-08-22-00:00 ~ 2018-09-03-23:00 事件二 一般降雨 2018-07-01-00:00 ~ 2018-07-14-23:00 事件三 一般降雨 2018-06-10-00:00 ~ 2018-06-22-23:00
3.2 支援向量回歸水位預測模式
假設有一組資料序列 {(𝑥1, 𝑦1), (𝑥2, 𝑦2), … , (𝑥𝑖, 𝑦𝑖)},線性支援向量回歸之函數 如(3-1)式所示:
𝑓(𝑥) = (𝜔 ⋅ 𝑥) + 𝑏 (3-1)
其中 𝑥𝑖:輸入向量 𝑦𝑖:實際輸出向量
𝑓(𝑥):回歸函數之輸出向量 𝜔:𝑓(𝑥) 之複雜度(complexity)
𝑏:常數
𝜔 之數值愈小代表模式愈不複雜,𝑏 為常數,通常最後才決定。
依據結構風險最小化法則(陳磊等人,2006;張逸凡,2005),比照前人之研究
(張逸凡,2005)可以將線性支援向量回歸問題表示為(3-2)式:
𝑀𝑖𝑛𝑖𝑚𝑖𝑧𝑒 1
2∥ 𝜔 ∥2+ 𝐶 ∑(𝜉𝑖 + 𝜉𝑖∗)
𝑙
𝑖=1
Subject to 𝑦𝑖 − (𝜔 ⋅ 𝑥𝑖 + 𝑏) ≤ 𝜀 + 𝜉𝑖 (𝜔 ⋅ 𝑥𝑖+ 𝑏) − 𝑦𝑖 ≤ 𝜀 + 𝜉𝑖∗
𝜉𝑖, 𝜉𝑖∗ ≥ 0, 𝑖 = 1, … , 𝑙
(3-2)
其中 12 ∥ 𝜔 ∥2 代表模式複雜度,𝜀 為容許寬度(𝜀-tube),C ∑𝑙𝑖=1(𝜉𝑖+ 𝜉𝑖∗) 代 表控制經驗風險(Empirical Risk),𝜉𝑖 與 𝜉𝑖∗ 為寬鬆變數(Slack Variable),分別代 表位於容忍區間上方及下方出現誤差的訓練資料。
若 C ∑𝑙𝑖=1(𝜉𝑖+ 𝜉𝑖∗) 較大,則表示模式需要對資料做大的調整,因此計算時會 將寬鬆變數之和乘上為懲罰參數 (Penalty parameter) C,C 值越大代表誤差發生時 對目標函數影響越大,不敏感損失函數為:
|𝑦 − 𝑓(𝑥)|𝜀 = { 0,
|𝑦 − 𝑓(𝑥)| − 𝜀 if |𝑦 − 𝑓(𝑥)| ≤ 𝜀
, otherwise (3-3)
上式中 𝑦 為實際值,𝑓(𝑥) 為估計值。我們定義一個可容許的誤差容忍區間(𝜀- tube),若實際值落於此區間內則損失函數(Loss function)值為零;否則損失函數 值則不為零,計算懲罰,此時點落於誤差容忍區間外,由此損失函數即可定義出實 際值與估計值之誤差,如圖 3.2-1 與圖 3.2-2 所示。
引入拉格朗日乘子(Lagrange multipliers)𝛼, 𝛼∗, 𝜂, 𝜂∗,得到下面的拉格朗日函 數,求解:
𝐿(𝜔, 𝑏, 𝜉, 𝜉∗; 𝛼, 𝛼∗, 𝜂, 𝜂∗) = 12∥ 𝜔 ∥2+ 𝐶(∑𝑙𝑖=1(𝜉𝑖 + 𝜉𝑖∗))
− ∑𝑙𝑖=1𝛼𝑖[𝜀 + 𝜉𝑖 − 𝑦𝑖 + (𝜔 ⋅ 𝑥𝑖) + 𝑏]
− ∑𝑙𝑖=1𝛼𝑖∗[𝜀 + 𝜉𝑖∗+ 𝑦𝑖 − (𝜔 ⋅ 𝑥𝑖) − 𝑏]− ∑𝑙𝑖=1(𝜂𝑖𝜉𝑖 + 𝜂𝑖∗𝜉𝑖∗)
(3-4)
對上式分別求偏導,即 𝑚𝑎𝑥
𝛼,𝛼∗,𝜂,𝜂∗ 𝑚𝑖𝑛
𝜔,𝑏,𝜉,𝜉∗𝐿(𝜔, 𝑏, 𝜉, 𝜉∗; 𝛼, 𝛼∗, 𝜂, 𝜂∗) 可得:
𝜀 𝜀
支援向量 線性回歸
支援向量回歸 線性回歸
𝜉𝑖
圖 3.2-1 線性回歸與支援向量回歸之比較(改繪自 Vapnik, 1998)
圖 3.2-2 線性回歸與支援向量回歸之損失函數比較(改繪自 Vapnik, 1998)
∂𝐿
∂𝜔 = 0 → 𝜔 − ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)𝑥𝑖 = 0
∂𝐿
∂𝑏 = 0 → ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)= 0
∂𝐿
∂𝜉𝑖 = 0 → 𝐶 − 𝛼𝑖 − 𝜂𝑖 = 0
∂𝐿
∂𝜉𝑖∗ = 0 → 𝐶 − 𝛼𝑖∗− 𝜂𝑖∗ = 0
(3-5)
𝛼𝑖, 𝛼𝑖∗, 𝜂𝑖, 𝜂𝑖∗ ≥ 0, 𝑖 = 1, … , 𝑙
將上式代入(3-4),可將 𝜔、𝑏 、𝜉 消去,只留下 𝛼、𝜂,得到 SVR 對偶問題
(dual problem):
𝑀𝑎𝑥𝑚𝑖𝑧𝑒
𝛼,𝜂
−12∑𝑙𝑖,𝑗=1(𝛼𝑖∗− 𝛼𝑖)(𝛼𝑗∗− 𝛼𝑗)(𝑥𝑖 ⋅ 𝑥𝑗) − 𝜀 ∑𝑙𝑖=1(𝛼𝑖∗+ 𝛼𝑖)+ ∑𝑙𝑖=1𝑦𝑖(𝛼𝑖∗−
𝛼𝑖) (3-6)
𝑆𝑢𝑏𝑗𝑒𝑐𝑡 𝑡𝑜
∑(𝛼𝑖∗− 𝛼𝑖)
𝑙
𝑖=1
= 0
0 ≤ 𝛼𝑖 ≤ 𝐶 0 ≤ 𝛼𝑖∗ ≤ 𝐶 𝑖 = 1, … , 𝑙
上式即為二次規劃(quadratic programming)問題,求解上式即可得到 𝛼𝑖、𝛼𝑖∗, 再將非零的 𝛼𝑖、𝛼𝑖∗ 代入 𝜔 = ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)𝑥𝑖 可得 𝜔,𝑏 值由 Karush-Kuhn- Tucker (KKT) conditions (Fletcher, 1987)求得,分別如(3-7)、(3-8)式所示:
𝜔 = ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)⋅ 𝑥𝑖 (3-7)
𝛼𝑖(𝜔 ⋅ 𝑥𝑖 + 𝑏 − 𝑦𝑖 + 𝜀 + 𝜉𝑖) = 0 (3-8)
綜上所述,線性支援向量回歸模式可表示為(3-9)式,𝛼𝑖∗− 𝛼𝑖 ≠ 0 所對應的 資料即爲支援向量:
𝑓(𝑥) = ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)(𝑥 ⋅ 𝑥𝑖) + 𝑏 (3-9)
對於非線性支援向量回歸模式,則是在(3-1)式引入非線性映射函數(nonlinear mapping function)𝜙(𝑥),決策函數變爲:
𝑓(𝑥) = 𝜔 ⋅ 𝜙(𝑥) + 𝑏 (3-10)
所以(3-6)式將變爲下式,其限制條件不變:
𝑀𝑎𝑥𝑚𝑖𝑧𝑒
𝛼,𝜂
−12∑𝑙𝑖,𝑗=1(𝛼𝑖∗− 𝛼𝑖)(𝛼𝑗∗− 𝛼𝑗)[𝜙(𝑥𝑖) ⋅ 𝜙(𝑥𝑗)] − 𝜀 ∑𝑙𝑖=1(𝛼𝑖∗+ 𝛼𝑖)+
∑𝑙𝑖=1𝑦𝑖(𝛼𝑖∗− 𝛼𝑖) (3-11)
求解式中 𝜙(𝑥𝑖)、𝜙(𝑥𝑗) 需要引入核函數(Kernel Function)K,函數滿足 𝐾(𝑥𝑖, 𝑥𝑗) = 𝜙(𝑥𝑖) · 𝜙(𝑥𝑗),本研究參考前人之研究,采用多項式(Polynomial)之核 函數。非線性支援向量回歸模式可表示為:
𝑓(𝑥) = ∑𝑙𝑖=1(𝛼𝑖∗− 𝛼𝑖)𝐾(𝑥, 𝑥𝑖) + 𝑏 (3-12)
𝐾(𝑥𝑖, 𝑥𝑗) = [𝛾(𝑥𝑖, 𝑥𝑗) + 𝑐]𝑑 (3-13)
其中 𝛾、𝑐、𝑑 爲核函數之參數。
3.3 灰色水位預測模式
降雨——逕流過程具有因果關係,符合灰色系統理論,故可將其視為一組具有 不確定特性的灰色過程。利用雨量與流量之累加生成序列,建立降雨——逕流預報 模式,可應用於集水區之即時逕流預報(張簡鳳蓮,2002)。
微分水文灰色模式(Differential Hydrological Grey Model)(夏軍, 1989;莊文南, 1993)採用時間序列變換方式建立,弱化原始數列之隨機性,簡稱 DHGM (n+1, r+1) 模式。由於雨量與流量為非線性的對應關係,所以儘管原始序列有漲落起伏變化,
但經累加生成處理後,變換序列則呈有規律增長趨勢,可能弱化為近似線性關係,
易於分析與模擬(莊文南, 1993)。本研究參考包玉海(1995),僅考慮一次累加生 成之 DHGM (2,2) 模式:
圖 3.2-3 非線性支援向量回歸架構示意圖(改繪自 Vapnik, 1998)
𝑑𝑄(1)(𝑡)
𝑑𝑡 + 𝑎1𝑄(1)(𝑡) = 𝑏0𝑑𝑅(1)𝑑𝑡(𝑡−1)+ 𝑏1𝑅(1)(𝑡 − 1) (3-14)
其中 𝑄(1)(𝑡):流量之一次累加生成,即累積流量(cms)
𝑅(1)(𝑡):雨量之一次累加生成,即累積雨量(mm)
𝑎1、𝑏0、𝑏1:模式參數
(3-14)式為微分方程,依照前述 GM (1,1) 模式之原理((2-4)式至(2-9)
式),將其轉化成離散型之差分式:
𝑄(0)(𝑡) + 𝑎1𝑧(1)(𝑡) = 𝑏0𝑅(0)(𝑡 − 1) + 𝑏1𝑅(1)(𝑡 − 1) (3-15)
𝑧(1)(𝑡) = 0.5 ⋅ [𝑄(1)(𝑡) + 𝑄(1)(𝑡 − 1)] (3-16)
(3-16)式為 𝑄(1)(𝑡) 的白化值,𝑄(0)(𝑡) 為原始流量,是 𝑄(1)(𝑡) 與 𝑄(1)(𝑡 − 1)的差值,𝑅(0)(𝑡 − 1) 同理。將其代入推導化簡 (3-15) 式:
𝑄(0)(𝑡) +𝑎1
2 [𝑄(1)(𝑡) + 𝑄(1)(𝑡 − 1)] = 𝑏0𝑅(0)(𝑡 − 1) + 𝑏1𝑅(1)(𝑡 − 1)
(3-17)
𝑄(1)(𝑡) − 𝑄(1)(𝑡 − 1) +𝑎1
2 𝑄(1)(𝑡) +𝑎1
2 𝑄(1)(𝑡 − 1)
= 𝑏0[𝑅(1)(𝑡 − 1) − 𝑅(1)(𝑡 − 2)] + 𝑏1𝑅(1)(𝑡 − 1)
(3-18)
(1 +𝑎1
2) 𝑄(1)(𝑡) + (−1 +𝑎1
2) 𝑄(1)(𝑡 − 1)
= (𝑏0+ 𝑏1)𝑅(1)(𝑡 − 1) − 𝑏0𝑅(1)(𝑡 − 2)
(3-19)
(2 + 𝑎1)𝑄(1)(𝑡)
= (2 − 𝑎1)𝑄(1)(𝑡 − 1) + (2𝑏0+ 2𝑏1)𝑅(1)(𝑡 − 1)
− 2𝑏0𝑅(1)(𝑡 − 2)
(3-20)
𝑄(1)(𝑡) =2 − 𝑎1
2 + 𝑎1𝑄(1)(𝑡 − 1) +2𝑏0+ 2𝑏1
2 + 𝑎1 𝑅(1)(𝑡 − 1) + −2𝑏0
2 + 𝑎1𝑅(1)(𝑡 − 2)
(3-21)
改寫爲:
𝑄(1)(𝑡) = 𝐶1⋅ 𝑄(1)(𝑡 − 1) + 𝐶2 ⋅ 𝑅(1)(𝑡 − 1) + 𝐶3⋅ 𝑅(1)(𝑡 − 2)
(3-22)
其中 𝐶1= 2−𝑎2+𝑎1
1, 𝐶2 =2𝑏2+𝑎0+2𝑏1
1 , 𝐶3 =2+𝑎−2𝑏0
1,為模式參數。
由於流量與雨量之累積值相差過大,因此需先將雨量與流量做無因次化處理後 再去率定參數。
𝑄~(1)(𝑡) = 𝐶1⋅ 𝑄~(1)(𝑡 − 1) + 𝐶2⋅ 𝑅~(1)(𝑡 − 1) + 𝐶3⋅ 𝑅~(1)(𝑡 − 2)
(3-23)
其中 𝑄~(1)(𝑡) =𝑄(1)𝑄(𝑡):無因次化後之累積流量
𝑅~(1)(𝑡) =𝑅(1)𝑅(𝑡):無因次化後之累積雨量
𝑄:平均流量(cms)
𝑅:平均雨量(mm)
𝐶1、𝐶2、𝐶3:模式參數
張逸凡 (2005) 假定河流集水區為一個整體系統,此時水位變化可視為流量變 化之另一形式輸出,建立了類似上述灰色降雨–逕流模式的降雨–水位高度灰色模 式。本研究效仿過往研究(莊文南,1993;陳憲宗,1998)之無因次化處理方法,
採取均值化處理,即是將 2017 年一整年之雨量與水位高度值各除以年度平均雨 量與平均水位,與支援向量回歸所使用之資料相同。本研究採用此種灰色水位預報 模式,並與支援向量回歸、線性回歸之水位預報模式做對比。
令 S𝐿 為牛稠溪橋水位高度;R𝐿 為朴子溪流域之雨量,由流域內所選用的雨 量站資料經徐昇網法 (Thiesson network method) 求得。上述變量之「水位」即為
「水位漲差」。因此(3-23)式可以改寫為:
𝑆~𝐿(1)(𝑡) = 𝐶1⋅ 𝑆~𝐿(1)(𝑡 − 1) + 𝐶2⋅ 𝑅~𝐿(1)(𝑡 − 1) + 𝐶3⋅ 𝑅~𝐿(1)(𝑡 − 2)
(3-24)
其中 𝑆~𝐿(1)(𝑡) =𝑆𝐿(1)𝑆(𝑡)
𝐿 :無因次化後之累積水位高度 𝑅~(1)(𝑡) =𝑅(1)𝑅(𝑡):無因次化後之累積雨量
𝑆𝐿:平均水位高度(m)
𝑅:平均雨量(mm)
對(3-24)式之無因次化後的累積雨量與累積水位高度值,以最小二乘法求解 灰色降雨——水位高度預報模式之參數 𝐶1、𝐶2 與 𝐶3:
𝑌 =
[ 𝑆
~ 𝐿(1)(3) 𝑆~
𝐿(1)(4) 𝑆~
𝐿(1)(5)
⋮ 𝑆~
𝐿(1)(𝑡)]
, 𝐵 =
[ 𝑆
~
𝐿(1)(2) 𝑅~(1)(2) 𝑅~(1)(1) 𝑆~𝐿(1)(3) 𝑅~(1)(3) 𝑅~(1)(2) 𝑆~𝐿(1)(4) 𝑅~(1)(4) 𝑅~(1)(3)
⋮ ⋮ ⋮
𝑆~
𝐿(1)(𝑡 − 1) 𝑅~(1)(𝑡 − 1) 𝑅~(1)(𝑡 − 2)]
, 𝑎^ = [ 𝐶1 𝐶2 𝐶3]
(3-25)
𝑎^ = (𝐵𝑇𝐵)−1𝐵𝑇
𝑌
(3-26)模式率定結果為:
𝐶1 = 0.9996 𝐶2 = 0.003462 𝐶3 = −0.003254 𝑆𝐿 = 15.83𝑚 𝑅 = 0.2704𝑚𝑚
此時代入上述率定結果參數,即可建立牛稠溪橋水位站 t 時刻的灰色無因次累 積水位方程式為:
𝑆~𝐿(1)(𝑡) = 0.9996 ⋅ 𝑆~𝐿(1)(𝑡 − 1) + 0.003462 ⋅ 𝑅~𝐿(1)(𝑡 − 1) − 0.003254 ⋅ 𝑅~𝐿(1)(𝑡 − 2)
(3-27)
牛稠溪橋水位站 t 時刻的灰色水位方程式為:
𝑆𝐿(1)(𝑡) = 𝑆~𝐿(1)(𝑡) × 𝑆𝐿 (3-28)
S𝐿(0)(𝑡) = S𝐿(1)(𝑡) − S𝐿(1)(𝑡 − 1) (3-29)
超前 l 時刻的灰色水位預測方程式為:
S𝐿(0)(𝑡 + 𝑙) = S𝐿(1)(𝑡 + 𝑙) − S𝐿(1)(𝑡 − 1 + 𝑙) (3-30)
3.4 線性回歸預測模式
本研究之資料序列為 {(𝑥1, 𝑦1), (𝑥2, 𝑦2), … , (𝑥𝑖, 𝑦𝑖)},簡單線性回歸方程可寫爲:
𝑓(𝑥) = 𝑎 + 𝑏𝑥 (3-31)
𝑎 = 𝑦̅ − 𝑏𝑥̅ (3-32)
𝑏 = ∑𝑛𝑖=1∑(𝑥𝑖−𝑥̅)(𝑦(𝑥 𝑖−𝑦̅)
𝑖−𝑥̅)
𝑛𝑖=1 =∑∑𝑛𝑖=1𝑥𝑥𝑖𝑦𝑖−𝑛𝑥̅𝑦̅
𝑖2−𝑛𝑥̅2
𝑛𝑖=1 (3-33)
其中 𝑥:雨量觀測值 𝑥̅:平均雨量(mm)
𝑦:水位高度觀測值(m)
𝑦̅:平均水位(m)
𝑓(𝑥):水位高度預測值(m)
𝑎,𝑏:線性回歸方程常數 𝑛:樣本數
3.5 水位傳播時間
洪水之傳播時間為洪水事件之重要參數之一,這是由於河川之上、下游水位變 化存在遲滯現象。假設有一河川水位測站位於下游,當降雨空間分佈偏上游,則傳 播時間較長,偏下遊則傳播時間較短(王如意、易任,1979)。
因為洪水預測中需要儘快得出結論,同時可適當捨棄精確度。故本研究嘗試忽 略多峰形之水位曆線,只將尖峰水位(主峰段)抵達時間作為參考依據。事實上多 峰形之水位曆線複雜多變,在最高水位抵達之前可能已經有較低峰值經過,實務工 程中需進行進一步之定量分析。
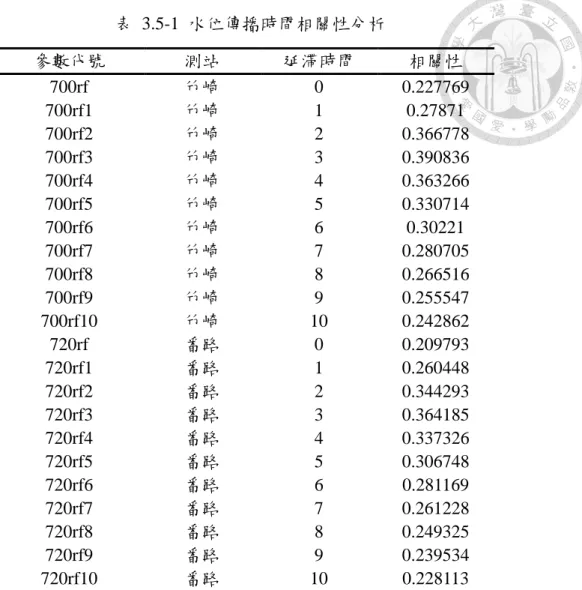
尖峰水位之抵達時間則經由降雨、水位變化之相關性分析得到,如表 3.5-1 所 示。
表 3.5-1 水位傳播時間相關性分析
參數代號 測站 延滯時間 相關性
700rf 竹崎 0 0.227769
700rf1 竹崎 1 0.27871
700rf2 竹崎 2 0.366778
700rf3 竹崎 3 0.390836
700rf4 竹崎 4 0.363266
700rf5 竹崎 5 0.330714
700rf6 竹崎 6 0.30221
700rf7 竹崎 7 0.280705
700rf8 竹崎 8 0.266516
700rf9 竹崎 9 0.255547
700rf10 竹崎 10 0.242862
720rf 番路 0 0.209793
720rf1 番路 1 0.260448
720rf2 番路 2 0.344293
720rf3 番路 3 0.364185
720rf4 番路 4 0.337326
720rf5 番路 5 0.306748
720rf6 番路 6 0.281169
720rf7 番路 7 0.261228
720rf8 番路 8 0.249325
720rf9 番路 9 0.239534
720rf10 番路 10 0.228113
本研究列舉降雨開始後 0-10 小時之降雨及水位相關性。對於「番路 C0M700」
測站,三小時延滯時間之相關性最高,其次為二、四;對於「竹崎 C0M720」測站,
其結果與前者相仿,但相關性較前者低。為了簡化模式架構,本研究選用之參數為:
700rf2、700rf3、700rf4、720rf2、720rf3、720rf4,將兩個雨量測站的資料,分別計 算 2、3、4 小時之延滯期,即使用過去 2、3、4 小時之資料,輸入支援向量回歸 與線性回歸模式。對於灰色水位模式,本研究僅選擇 3 小時作為兩個雨量站的水 位延遲時間。
3.6 模式評鑒指標
本研究採用了四個評鑒指標,分別為:決定係數、均方根誤差、尖峰水位時間 誤差、絕對最大誤差。
決定係數(Coefficient of determination,R2)是一個評價兩個變數線性相關度 的指標,為回歸平方和與總平方和之比(Glantz et al., 1990)。對於簡單的線性回歸 而言,決定係數為樣本相關係數(Coefficient of Correlation)的平方。R2 取值在 0 到 1 之間,且無單位,R2 越高回歸方程式越優。
R2 = 1 −𝑆𝑆𝐸𝑆𝑆𝑇 (3-34)
𝑆𝑆𝐸 = ∑𝑛 (𝑦(𝑖)− 𝑦̅)2
𝑖=1 (3-35)
𝑆𝑆𝑇 = ∑𝑛 (𝑦(𝑖)− 𝑦̅)2
𝑖=1 (3-36)
𝑦̅ =1𝑛∑𝑛𝑖=1𝑦(𝑖) (3-37)
其中 SSE:殘差平方和,Sum of Squares for Error SST:總平方和,Sum of Squares fortotal 𝑦(𝑖):觀測值
𝑦̅:平均觀測值
𝜇𝑦:觀測值對應之預測值
均方根誤差(Root-mean-square error,RMSE)是預測值與真實值偏差的平方與 觀測次數比值的平方根,即預測值與真實值之差的樣本標準差,可視為預測誤差
(Hyndman et al., 2006)。因其單位與資料集相同,所以在資料集相同的情況下,
不僅可反映不同模式中的誤差高低,更可用於定量分析。均方根誤差越接近 0,代 表誤差越小。
RMSE = √∑𝑖=1𝑛 (𝑦(𝑖)− 𝑦̂(𝑖))2 𝑛
(3-38)
其中 𝑦(𝑖):真實值
𝑦̂(𝑖):對應之預測值 𝑛:樣本數
絕對最大誤差(Maximum absolute error,MAE)代表絕對誤差之範圍,又稱絕 對誤差界(張逸凡,2005)。
MAE = max {|𝑦(𝑖)− 𝑦̂(𝑖)|} (3-39)
尖峰水位誤差(Error of peak water level,EPWL)為實際尖峰流量到達時刻,
預測水位與真實值之差值。差值爲正,則預測值過高,反之則爲預測值過低。在洪 水預測中,尖峰水位誤差越接近 0 越好,同時負值的誤差相較於正值更不能被接 受。
EPWL = 𝑦̂𝑃𝑒𝑎𝑘 − y𝑃𝑒𝑎𝑘 (3-40)
其中 y𝑃𝑒𝑎𝑘:真實洪峰高度
𝑦̂𝑃𝑒𝑎𝑘:對應之預測洪峰高度
第四章 結果與討論
研究首先需要將訓練資料格式化處理,並將其中缺失之數值予以插值,而後分 別對資料進行支援向量回歸、灰色水位、線性回歸模式訓練,並預測兩場降雨之水 位高度、評估模式可靠性。
4.1 模式運行環境
研究使用了基於 Python 3.x(Python Software Foundation, 2001)的機器學習 套件 SKlearn(David Cournapeau, 2007),匯入 LinearRegression 以及 SVM 模組 進行實作。
因研究訓練集較少(52560 筆資料),使用純 CPU 運算之速度已經十分可觀。
在本人的 AMD FX-9590 上(稍弱於現代的 Intel i5-9400),除去資料前處理工作、
洪峰延滯期決定、繪圖所需之時間,使用 SVM 模組學習並預測的過程僅需 1~2 分鐘即可完成,非常符合快速預測之標準。
在資料量不大之情況下,任何一臺較新的個人電腦都可以勝任預測工作,相較 於 TensorFlow 等基於 GPU 加速的資料流(Dataflow programming)學習架構(段 生月等人,2019、Nevo et.al., 2019),對硬體要求更低。但如果資料集過於龐大,
學習所需的算力將會以指數形式增長,此時則需使用高性能電腦乃至工作站才可 以勝任。
4.2 模式率定資料概述
本研究選取了「牛稠溪橋(1)」水位測站作爲水位參考,測站每 10 分鐘記錄一 筆資料,因其資料記錄間隔與雨量站記錄間隔(每小時一筆)不同,故需要經過前 處理,以每小時爲單位進行平均,最後得到 8760 筆資料,如圖 4.2-1 所示。
研究選用之雨量站為「番路 C0M700」、「竹崎 C0M720」,位於河道上游集水 區。資料間隔在 1998-2017 年間為每小時一次,共 8760 筆,分別如圖 4.2-2 及 圖 4.2-3 所示。率定使用的雨量為兩個測站之平均雨量,資料整理後可得到圖 4.2- 4。值得注意的是,中央氣象局提供之雨量資料從 2018 年 1 月 1 日 0 時開始變 更為即時記錄,間隔不固定,故需要將即時之降雨量資料進行累加,得到以小時為 單位的每小時降雨量。
15 16 17 18 19 20 21 22
Water Level (m)
Date
0 10 20 30 40 50 60
Rainfall(mm)
Date
圖 4.2-1 番路雨量測站 2017 全年之日降雨量 圖 4.2-2 牛稠溪橋(1)測站 2017 全年之水位高度
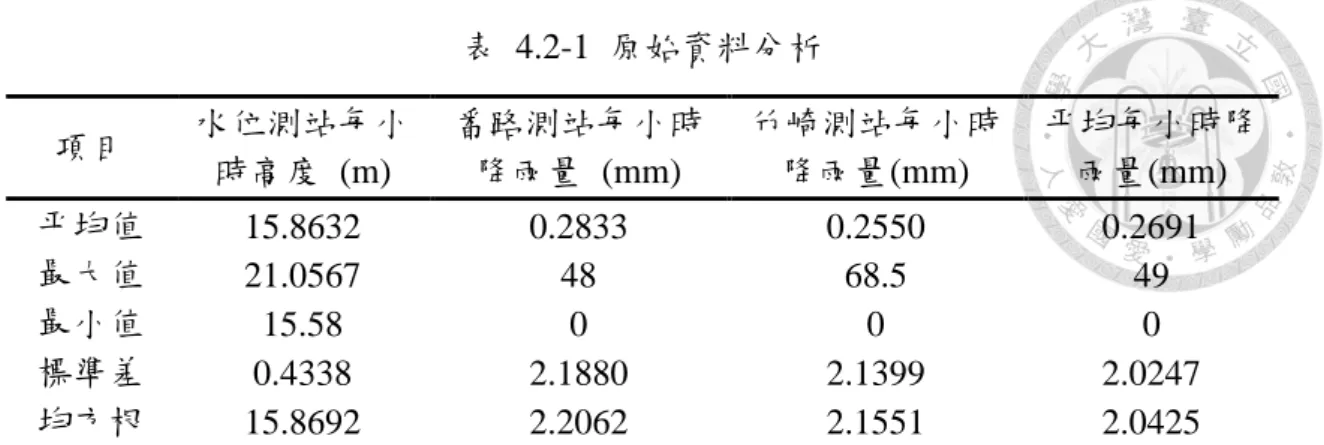
如圖 4.2-1 至圖 4.2-4 可明顯觀察到,朴子溪流域的雨季集中在全年七月前 後,河川水位高度在此期間也有一定抬升。原始資料經過分析后,可得到如表 4.2- 1 所示之初步資料。牛稠溪橋(1)水位測站在 2017 一年間,水位平均高度為 15.8632m,最高水位為 21.0567m,最低水位為 15.58m,水位標準差為 0.4338m,
水位均方根為 15.8692m。
本研究爲了快速得到結果,未對率定資料做出篩選。若希望使得模式準確度進 一步提升,可以考量排除旱季之資料,甚至排除所有未降雨日期之資料。
0 10 20 30 40 50 60
Rainfall(mm)
Date 0
10 20 30 40 50 60 70 80
Rainfall (mm)
Date
圖 4.2-4 流域上游 2017 全年之平均日降雨量 圖 4.2-3 竹崎雨量測站 2017 全年之日降雨量