具獨立可調變控制驅動波形之噴墨驅動系統設計
69
0
0
全文
(2) 具獨立可調變控制驅動波形之噴墨驅動系統設計 Individual Addressable Waveform Trimming Driving Design For Inkjet Printing Systems. 研 究 生:黃介一. Student:Chieh-Yi Huang. 指導教授:吳炳飛 教授. Advisor:Prof. Bing-Fei Wu. 國 立 交 通 大 學 電機學院 電機與控制學程 碩 士 論 文. A Thesis Submitted to College of Electrical and Computer Engineering National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical and Control Engineering June 2007 Hsinchu, Taiwan, Republic of China. 中華民國九十六年六月. ii.
(3) 具獨立可調變控制驅動波形之噴墨驅動系統設計. 學生:黃介一. 國立交通大學. 指導教授:吳炳飛. 電機學院. 摘. 電機與控制學程碩士班. 要. 本論文研製之一個在最近的很多工業領域或是學術研究,噴墨技術被運 用在很多領域裡頭發展,像是顯示器領域,半導體領域等。尤其是使用壓 電式噴墨頭為基礎的相關衍生應用,針對其中特別有運用利基的課題進行 相關的研究與投入,像是顯示器的彩色濾光片,金屬線路的形成,液晶的 填入,以及未來著眼的軟性顯示器之連續製程等等。 最近綜觀噴墨技術的發展,不只是縮小噴墨的墨滴的技術數個微微公升 (pico-liter)而已,具有多功, 可調變性控制的驅動技術,以及及時的觀測 系統亦被積極的開發與投入,其將決定並提升噴墨系統的能力與可靠度。 尤其存在這系統中的基礎元件噴頭製造上的變異,所衍生諸多噴墨孔所行 程墨滴的不均一性問題,將造成工業應用領域的限縮。本論文將提及一種 驅動控制墨滴變異的方法,將噴墨頭中的各個噴孔施以獨立的驅動波形, 讓每一個噴孔所形成的墨滴皆可以把變異控制在最佳值,,並以控制方法,. iii.
(4) 補償噴孔製造差異,以及高頻高壓操作下的種種環境條件之落差,我們將 其稱之為一個具有獨立可調整驅動波形的電路設計(Addressable Waveform Trimming Circuit, AWTC),本設計包含有驅動每一個獨立噴孔的高電壓驅動 電路,並將其時序控制單元設計並置入 FPGA 中;具有一個類比數位轉換 的驅動電壓迴授機制,在噴墨的調校過程中監控施於每一個噴孔的電壓; 另外及時的觀墨量測系統,其將追蹤每一顆墨滴形成的狀態,並適時的改 變驅動的條件,讓每一個噴孔能夠輸出優良且均一的墨滴品質。 讓噴墨在工業應用中,落實可量產性是我們想要著力的點。以顯示器之 噴墨工業應用來說,據統計需要降低墨滴的變異至±2%才有實施的機會。本 論文探討噴墨技術即時高精密控制與多工獨立驅動方法,電路設計特徵為 開放式可任意調變波形, 除將其噴孔與噴孔間的噴墨行為之變異縮至最 小,並使在工業應用上能廣泛的適用各種不同機制驅動的壓電式噴墨頭, 在噴墨頭製造時所存在的噴孔特性差異之等效電容性負載變異,可以自主 回饋修正驅動條件,並建立相關的最佳化控制邏輯。. iv.
(5) Individual Addressable Waveform Trimming Driving Design For Inkjet Printing Systems. Student:Chieh-Yi Huang. Advisors:Prof. Bing-Fei Wu. Degree Program of Electrical and Computer Engineering National Chiao Tung University. ABSTRACT. Definitely the ink-jet fabrication is an expectable technology in the fields of display and semiconductors, especially the applications in the fabrication of color filters, the forming of metal circuits, the dispensing of liquid crystal, and the further continuous manufacture of flexible displays etc. Recently, inkjet printing technologies have been rapidly developing and are not only for the diminished size of the drops to the pico-liter, the multiplex driving scheme, or for the real-time observation technology which led to the improvement of the inkjet printing performance, and which realized the pixel-to-pixel control. In this thesis, an electrical controller is designed to differentiate the waveform for each nozzle synchronously, to compensate jetting disturbance for the nozzle cell deformation and pressure drag loss during inkjet firing at high voltage, and for a v.
(6) high frequency named addressable waveform trimming circuit (AWTC). The controller is composed of a high voltage control block which drives each nozzle, an FPGA chip to multiplex the high voltage output, an A/D converter which transfers an analog signal into a digital signal and then into FPGA, a differential signal input to FPGA as feedback to correct analog output, which gives a real-time tracking of jetting quality to verify the nozzle-to-nozzle variation. For dynamic feedback of the drop variation in real jetting, this AWTC accepts correction signals by a machine vision system synchronously with the firing trigger in order to analyze the individual captured images. The contribution of this work is to improve the nozzle jetting performance which is capable handled within minimum jetting droplet variation between nozzle to nozzle in a print head. In industry applications, this ink-jet driving technical can be suitable for the extensive piezoelectric print-heads, and create the logic of the driving waveform of droplet size modulation of inkjet printing technology.. vi.
(7) 誌. 謝. 首先感謝我的指導教授吳炳飛老師,在學生的眼中是一位中肯、執著且 努力的老師,更是一位尊敬的長者,能夠在吳老師門下學習如何作研究深 覺是一件榮幸的安排,在碩士班學習期間的教導與支持,讓我在研究受挫、 停滯不前的時候給予正確方向的引導,以致於能持續研究並達到預期成果。 再來要感謝的人是我工研院光電所的歷任老闆們,應台發組長、張惠珍 經理以及顯示中心鄭兆凱博士的支持,諸位能夠支持我去念完這個階段的 學業,同時又能夠對我在工作上有所容忍,讓我得以兼顧學業與工作,使 得我不管是在專業技能上,或是研究能力上之各方面皆有顯著的成長,讓 我能學習到、看到在不同領域的人所做不同領域的事。 當然實驗室的伙伴們,大家一起合作作噴墨工業上的先兵,投入一個大 家覺得值得努力的目標邁進,是一件快樂的事。在研究期間得到大家的協 助也不勝言謝,李裕正博士、祖閔、政翰、家銘、國強、伍爺、志偉謝謝 你們大家在工作上的支持。 最後,要感謝我的爸媽默默的支持,打點家裡諸多事情讓我無後顧之憂、 支持我的老婆劉雅君,以及看我在寫論文就不吵我的兒子黃上誠。在我低 潮時陪伴我、鼓勵我,今天得以順利的完成研究所學業,絕對不是光靠我 一個人就可以的,謝謝你們!. vii.
(8) 目 摘. 錄. 要 ...............................................................................................................................iii. ABSTRACT ...............................................................................................................................v 誌 謝 ................................................................................................................................vii 目 錄 ...............................................................................................................................viii 圖 目 錄 ...................................................................................................................................ix 表 目 錄 ...................................................................................................................................xi 符 號 說 明 ............................................................................................................................xii 第1章 緒論 ................................................................................................................... - 1 1.1 工業應用噴墨技術介紹 ................................................................................... - 1 1.2 目前遇到的問題 ............................................................................................... - 2 1.3 論文架構介紹 ................................................................................................... - 4 第2章 噴墨系統 ........................................................................................................... - 5 2.1 介紹 ................................................................................................................... - 5 2.2 噴墨頭壓電材料基本工作原理 ....................................................................... - 5 2.3 噴墨頭噴墨的動作原理 ................................................................................... - 9 2.4 工業用噴墨系統架構 ..................................................................................... - 11 2.5 實驗架設 ......................................................................................................... - 16 第3章 可調變驅動波形之噴墨驅動系統設計 ......................................................... - 17 3.1 介紹 ................................................................................................................. - 17 3.2 驅動電路原理 ................................................................................................. - 20 3.3 電路模擬 ......................................................................................................... - 23 3.4 驅動電路架構 ................................................................................................. - 28 3.5 電壓校正流程 ................................................................................................. - 36 第4章 實驗與分析 ..................................................................................................... - 38 4.1 噴墨光學觀測系統 ......................................................................................... - 38 4.2 墨滴觀測物理與調變的邏輯 ......................................................................... - 40 4.3 驅動波形輸出的量測 ..................................................................................... - 43 4.4 墨滴體積與飛行速度的量測 ......................................................................... - 47 4.5 驅動能力分析 ................................................................................................. - 51 第5章 結論及未來展望 ............................................................................................. - 53 5.1 結論 ................................................................................................................. - 53 5.2 未來展望 ......................................................................................................... - 54 自 傳 ......................................................................................................................... - 56 -. viii.
(9) 圖 目 錄 圖 1.1 (A)相同驅動狀況, 噴孔與噴孔間存在之不穩定的噴墨結果 (B) NOZZLE-TO-NOZZLE 變異, 對實際產品製造過程引起的缺陷..............................- 3 圖 2.1 壓電材料之壓電效應示意圖 ..................................................................................- 6 圖 2.2 壓電片等效電路模型 ..............................................................................................- 7 圖 2.3 噴墨頭的結構示意圖 ..............................................................................................- 8 圖 2.4 各種壓電致動器形式的噴墨頭 ..............................................................................- 9 圖 2.5 噴孔驅動行為示意圖 ............................................................................................- 10 圖 2.6 噴墨系統的架構方塊圖 ........................................................................................- 13 圖 2.7 壓電式噴墨頭之驅動基礎波形 ............................................................................- 14 圖 2.8 噴孔產生墨滴的過程 ............................................................................................- 15 圖 2.9 噴墨實驗系統之架設 ............................................................................................- 16 圖 3.1 在 ILC 方法之標準波形之下被驅動噴孔的反應行為 ........................................- 18 圖 3.2 在 ILC 方法之標準波形之下驅動之相鄰噴孔反應行為 ....................................- 18 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 3.3 ILC 控制的方塊邏輯 ............................................................................................- 19 3.4 電容充放電原理 ....................................................................................................- 20 3.5 電容充放電之電壓與電流曲線 ............................................................................- 21 3.6 噴孔驅動電路原理 ................................................................................................- 22 3.7 驅動電路模擬 ........................................................................................................- 24 3.8 動作模擬狀況—充電時間為 5 微秒(大於 5ΤC) ............................................- 25 3.9 動作模擬狀況—充電時間為 2 微秒 ....................................................................- 26 3.10 動作模擬狀況—充電時間為 1 微秒 ..................................................................- 26 3.11 模擬壓電元件之充電曲線歸納 ..........................................................................- 27 3.12 獨立噴孔驅動電路架構圖 ..................................................................................- 29 3.13 獨立噴孔之驅動控制晶片架構 ..........................................................................- 29 -. 圖 圖 圖 圖 圖 圖 圖. 4.1 4.2 4.3 4.4 4.5 4.6. 3.14 獨立噴孔之驅動控制 FSM .................................................................................- 30 圖 3.15 工作模式與指令分類與操作程序關係圖 ..........................................................- 31 圖 3.16 噴印資料 SPI 格式...............................................................................................- 35 圖 3.17 噴墨噴孔電壓校正流程 ......................................................................................- 37 噴墨頭驅動系統與觀測系統 ................................................................................- 39 觀測系統之墨滴特性分析程式 ............................................................................- 39 噴墨墨滴之優劣描述 ............................................................................................- 40 驅動噴孔之不良的墨滴射出情況 ........................................................................- 41 墨滴飛行分析圖 ....................................................................................................- 41 標準電容 120PF 之驅動波形 ................................................................................- 44 -. 4.7 DIMATIX 噴墨頭擇一噴孔之驅動波形 .................................................................- 44 圖 4.8 TRIDENT 噴墨頭單一噴孔之驅動波形..................................................................- 45 圖 4.9 同時驅動 64 個噴孔之取樣噴孔波形 ..................................................................- 46 ix.
(10) 圖 圖 圖 圖 圖 圖. 4.10 4.11 4.12 4.13 4.14 4.15. 影像擷取的時間關係 ..........................................................................................- 47 (A), (B), (C), (D) 120PF 噴墨頭調整不同充電時間所得之不同大小的墨滴......- 48 120PF 噴墨頭之驅動電壓與墨滴體積的關係 ...................................................- 49 120PF 噴墨頭之驅動電壓與墨滴飛行速度的關係 ...........................................- 49 120PF 噴墨頭多孔同時噴墨之調整存在差異前後影像 ...................................- 50 560PF 噴墨頭之驅動電壓與墨滴體積的關係 ...................................................- 52 -. x.
(11) 表 目 錄 表 表 表 表 表 表. 3.1 3.2 4.1 4.2 4.3 4.4. 開關開啟控制時間與充電電壓之關係表 ............................................................- 27 控制命令表 ............................................................................................................- 31 多噴孔同時驅動量測電壓 ....................................................................................- 46 120PF 噴墨頭充電時間對應電壓、墨滴體積、與飛行速度關係表 .................- 49 120PF 噴墨頭經過電壓調整之後的一致化的墨滴 .............................................- 51 560PF 噴墨頭充電時間對應電壓、墨滴體積關係表 .........................................- 51 -. xi.
(12) 符 號 說 明 S. :壓電元件的變形量 (Deformation of piezoelectric) V :電壓 (Voltage) dt :逆電壓常數矩陣 (Inverse voltage constant matrix) I :電流 (Current) Y’,Y :導納 (Conductance) Z :阻抗 (Impedance) ω :2πf A d εr, ε0 C0 R0 R1 L1 C1 r m s Tr Th Tf Vc. :壓電元件的截面積 (The cross-section area of piezoelectric) :壓電元件的厚度 (The thickness of piezoelectric) :電容介電係數 (The dielectric constant of capacitance) :壓電元件的靜態電容 (The static capacitance of piezoelectric) :壓電元件介電損耗的並聯電組 (The parallel resistance of dielectric decay of piezoelectric) :壓電元件二階等效電阻 (The 2nd order equivalent resistance of piezoelectric) :壓電元件二階等效電感 (The 2nd order equivalent inductance of piezoelectric) :壓電元件二階等效電容 (The 2nd order equivalent capacitance of piezoelectric) :等效電阻 (The equivalent resistance) :等效質量 (The equivalent mass) :等效彈性強度 (The equivalent intensity of resilience) :驅動波形爬升時間 (The rising period of driving waveform) :驅動波形持續時間 (The holding period of driving waveform) :驅動波形下降時間 (The falling period of driving waveform) :電容充電的電壓 (The charged voltage of capacitance)). xii.
(13) Vi. :充電輸入電壓 (The input voltage for charging) Rc,Rd :充電電阻 (The charged resistance)) τc,τd :充電時間常數 (The time constant of charging) t0,t1 :充放電時間 (The period of charging/discharging) Sig1,2 :充放電路徑開關控制信號 (The control signal for switching charging and discharging). xiii.
(14) 第1章 緒論. 1.1 工業應用噴墨技術介紹 Inkjet 的技術發展衍生到工業的應用在學術的研究探討上已經成為是一 個重要的課題了。Inkjet 的應用可以噴不同的材料的墨水成型於不同的基板 上,這些噴印的墨滴以非常小的 Pico liter 為單位,在精度以微米(µm)為單 位的位置上作精準的噴印,如此即為多樣化的噴墨技術的衍生應用將儼然 成為全球各式各樣的工業領域的試探。 近來許多產品即將發展成熟陸續推出,如有機電晶體(Organic TFTs)、有 機記憶體(Organic Memory)、3D 電子元件、嵌入式被動元件(Embedded Passive)、系統構裝(SiP, System in Package)及薄膜覆晶封裝(COF, Chip on Flex)、彩色濾光片製作(Color filter)[1]、配向膜製程(Polyimide)、液晶 注入、電極(Electrode)等。針對各種可列印式電子元件或是相關無光罩製 程等之噴印技術巿場,國際大廠也積極投入相關噴墨材料、製程技術及植 佈平台的開發[2]。 在基礎的噴墨驅動上亦隨著趨勢發展,因應高階的噴墨製程應用,其趨 勢將往精緻與精準的噴墨驅動為目標,包含小墨滴噴頭技術、噴印均勻墨 滴技術的開發等等,而本文即為在噴印系統上驅動諸多不同設計的噴墨 頭,在每個噴頭上的噴孔所噴出來的墨滴皆可以有最小的差異,可以得到 噴印均勻的墨滴之目標進行研究與發展。設計製作所謂獨立的噴孔驅動技 術,其將搭配一噴墨法微流體控制技術之平台,將特定的材料植佈到特定 -1-.
(15) 基板上的指定區域,形成像素化的圖案,得以此技術實踐無光罩高階應用 製程技術,用於革新現有傳統製程與新興的產業的應用,以提高噴墨技術 應用於產業市場之新價值。. 1.2 目前遇到的問題 在高解析需求的顯示器製造的新興應用製程中,使用噴墨技術的衍生製 程技術運用是一個非常有潛力的新領域,因應如此,一個可具量產化、可 靠度高的穩定噴墨製程行為是絕對需要的。本論文中所敘述的噴墨系統, 所使用的是壓電式的噴墨頭,其將被實施運用於一個平面塗佈技術的實 施,其包含諸多噴墨孔在一個噴頭上,其可以是單一直線的高密度排列, 或者是多列且規則的矩陣式排列。每一個噴孔有一個獨立專屬於該噴孔的 壓電致動器,它的動作會依照噴印控制系統所給的資料決定諸多噴孔中哪 些噴孔要作噴印的動作,這個機制稱之為 Drop-On-Demand (DOD) 。 每一個噴孔要作噴墨的動作時,驅動器需要給壓電致動器一個驅動波 形,而一個墨滴便會透過壓電材料的擠壓形變而從噴孔射出。在噴墨頭的 生產製造上為了增加工業應用的可運用新領域,諸家噴墨頭製造商紛紛往 噴墨墨滴小體積的發展方向進行,在流體與壓電材料的相容性問題之外, 要使一個噴頭上的各個噴孔噴出一組夠準確而且夠一致的墨滴絕對是有一 定的門檻的。當然,在噴頭生產製造上,每一個噴頭的噴孔製作公差將被 更嚴苛的要求到一定的水準以上絕對是一種作法,只是相信這樣的作法在 機械加工技術或是材料物理特性的限制之下,使用驅動回饋補償技術會是 一個比較好的選擇。如圖 1.1(a) 所示,在每一個施以同樣的驅動條件之下, 所得到的一個包含體積不一致、衛星點、以及方向落點偏差等之不夠理想 的噴印結果是高階噴墨製程應用不樂見,也不允許的。圖 1.1(b)說明各種常 見的噴墨製程缺陷的形成原因,其中之左上圖缺陷的主要原因可能是因為. -2-.
(16) 液滴在乾燥的過程中,由於基板的表面性質的差異或是製程溫度的變化, 在沒有合適且穩定的噴墨控制條件配合之下所引起。而右邊上中下三圖, 則為因為噴墨噴孔間所存在的行為變異而造成的各種缺陷,包含各噴孔的 噴墨方向偏移(右上圖)、噴墨的噴孔間體積不一致(右中圖)。這是本文將用 即時的觀墨系統以及具獨立可調整噴孔間的差異的驅動作法結合成一個即 時誤差回饋的噴墨驅動控制器的目的。. (a). Data source from ITRI. (b). Data source from ITRI. 圖 1.1 (a)相同驅動狀況, 噴孔與噴孔間存在之不穩定的噴墨結果 (b) Nozzle-to-Nozzle 變異, 對實際產品製造過程引起的缺陷 -3-.
(17) 為此,一個噴墨頭上每一個噴孔本身的製造誤差,將必須要被適度的補 償機制進行補償,將所有要使用的噴孔之噴墨行為調整控制到一致,讓每 個噴孔驅動的結果之墨滴行為都會接近完全一樣,此時墨滴的品質將可以 得到控制與確保[3]。. 1.3 論文架構介紹 本論文的架構中,本章為本論文針對噴墨系統之工業應用需求、目前國 際間研究狀況, 以及量產上之技術可行性要求;第二章為噴墨驅動控制原理 與系統的說明;第三章為具獨立可調變控制驅動波形之驅動系統之設計; 第四章為驅動系統之分析歸納;第五章為結論與未來研究發展方向。. -4-.
(18) 第2章 噴墨系統. 2.1 介紹 本章節主要為噴墨系統的介紹。在工業應用的噴墨系統,因需要相容於 所實施的噴墨材料,所以目前占大宗所選的噴墨頭為壓電型的噴墨頭,針 對壓電材料的特性,噴墨頭基本的動作原理、驅動條件與整個噴墨系統各 功能介紹及其組成架構。. 2.2 噴墨頭壓電材料基本工作原理 壓電效應(Piezoelectrics)是在壓電材料中一種機械能與電能可以互相轉 換的現象,該現象最早是在 1880 年之際由 Pierre Curie 與 Jacques Curie 兄 弟所發現。之所以會有這樣的效應是因為晶格內的原子特殊排列的方式, 使得材料本身具有應力場與電廠耦合的效應,該效應又分為兩種分別為正 壓電效應與逆壓電效應[4],如圖 2.1 所示,其一為所謂正壓電效應乃是當 對壓電材料施以外力壓力時,材料因外力壓力產生形變產生電偶極距的壓 縮,此時壓電材料為抵抗變化會在材料表面產生正負電荷,以為機械能轉 為電能的效應。其二為所謂逆壓電效應乃與正壓電效應相反,在當壓電材 料的表面施以電場時,因為電場的作用使得電偶極距會被拉長,因為壓電 材料會抵抗電場的變化,所以會沿著施加電場的反方向伸長,此乃電能轉 為機械能之效應。. -5-.
(19) T Q. Q. T. (a) 正壓電效應. (b) 逆壓電效應. 圖 2.1 壓電材料之壓電效應示意圖 壓電式噴墨頭之工作原理即架構在壓電材料之逆壓電效應特性進行噴墨 設計,在給予噴墨頭噴孔之一驅動電壓波形時,可令壓電材料產生形變, 進而使噴頭內之流體艙室裡的墨水透過噴孔被推擠出來,而達到噴墨的目 的。其壓電元件的變形量(S)與所給的電壓(V)成正比變化,如 2.1 式 所示. (2.1). S = d tV. 其中 dt 為逆電壓常數矩陣 壓電材料就電氣模型等效電路則考量其為電容性負載的模型,參考壓電 微電機等效電路[5],其等效電路如圖 2.2(a) 所示以及其電路電導模型如 2.2 式所示 I =Y' = V. 其中. 1 1 + R0 jωC 0. C0 =. +. 1 ⎛ 1 ⎞ ⎟⎟ R1 + j ⎜⎜ ωL1 − C ω 1 ⎠ ⎝. (2.2). ε rε 0 A d. ,為壓電元件的靜態電容,A 是壓電元件的截面積,d. 是厚度, ε r 是相對介電係數 R0 ,為壓電材料介電損耗的並聯電阻. -6-.
(20) R1 =. r d t2. L1 =. m d t2 ,m 為等效質量. C1 =. d t2 s ,s 為等效彈性強度. ,r 為等效電阻. 其中在噴墨頭中 R1 的等效值因為 dt 原來數值原本就小,所以在 R1 會遠 大於 R0 的情況下,適度的忽略後段的等效電路,進而將簡化等效電路成為 2.2(b)所示。. C1 R0. C0. R1. R0. C0. L1 (a). (b). 圖 2.2 壓電片等效電路模型 等效電路模型將簡化成為如下式(2.3)所示 Y=. 1 1 + R0 jωC 0. ⇒. Z=. 1 + R0 jωC 0. (2.3). 以上所探討僅是電控驅動本身的模型探討,但是因為整體噴墨頭的設計 還會包含機構設計、流道設計、流體力學等等的考量,所以數學模型將更 加複雜,而且每一家噴墨頭的設計都不同,亦不得而知可以為其設計的模 型為何,所以後續章節所探討的,皆以適用噴墨頭壓電材料的電氣特性模 型作分析與討論的依據。 而我們綜觀目前國際幾家知名噴墨頭製造商的產品,在噴墨頭的組成結. -7-.
(21) 構上一般是由諸多零件所堆疊而成,可能是精密機械加工的零件或是由 MEMS 製程所生,在堆疊零件之空間中存在噴孔、微流體艙室、微流體的 流道以及壓電材料的致動器等等,如圖 2.3 其分別為知名廠商 Trident[6]與 Dimatix[7]的噴墨頭基本結構示意圖。無論這些噴墨頭設計的結構為何,我 們都希望在本論文所提出的驅動電路技術與機制皆可以進行驅動,透過我 們所提出的驅動補償流程可以對寬廣的模型參數範圍的噴墨頭進行補償與 修正,進而可以使墨滴的形成與行為之差異降至最低。. (a) Trident 噴墨頭的結構示意圖. (b) Dimatix 噴墨頭的結構示意圖 圖 2.3. 噴墨頭的結構示意圖. -8-.
(22) 2.3 噴墨頭噴墨的動作原理 噴墨頭被設計之基本工作形式約略可以分為四大種類,分別是所謂 Push mode、Bend mode、Squeeze mode 以及 Shear mode,如圖 2.4 所示,這幾種 壓電特性的噴墨頭都有國際知名的廠商應對,像 Trident 就是 Push mode 的 噴頭、PicoJet 的噴墨頭是以 Bend mode 的形式設計的、Mictofab 是 Squeeze mode 的代表、而 Shear mode 有 Dimatix 以及 Xaar。這些模式皆依照壓電材 料的逆壓電特性進行設計與使用,當外部給壓電元件一個驅動電壓能量則 將產生壓電形變,在噴頭中流體艙室會因為壓電材料變形的擠壓,對內部 的流體產生壓力,使得其往預設的噴嘴方向進行釋放,流體因此從噴孔被 壓力所帶出而達到噴墨的目的[8]。 Push mode. Band mode. Squeeze mode. Dimatix Spectra shear mode Piezoelectric actuator. Xaar shear mode. Data source form C H Cheng. 圖 2.4 各種壓電致動器形式的噴墨頭 噴墨的行為之示意圖如圖 2.5 所示,橫軸為時間單位為微秒(µs),該噴墨 程序將如以下敘述進行,時間從給予一個噴孔之壓電材料電能之前開始, 細部的描述如下所示: 噴孔的壓電元件結構狀態在電能輸入或是改變之前,維持像圖 2.3 中的 -9-.
(23) 驅動波形區段(a)一般,呈現墨水與壓電材料皆處於一穩態的狀態,我們將 該狀態稱之一般穩定狀態。 當電能開始變化,如驅動波形區段(b)中輸入能量上升時壓電元件會產生 形變,撐大內部微流體艙室,產生內部負壓力而進行充墨,由於非線性的 質量效應所造成在噴墨的行為上存在殘餘的震盪波,而這個震盪波會對在 Channel 裡頭的流體產生影嚮,此時進行墨水的充填需要一段充填穩定的時 間,使得內部壓力重新回復平衡達到穩態後,將可以進展到後續噴墨的動 作。 噴墨動作會在驅動波形區段(c)時間裡發生,將壓電元件因為形變的回復 使艙室內部的產生正壓力,而墨滴將從噴孔被壓力所推出。墨滴射出之後, 在艙室內的壓力依然因為壓電元件的特質,會持續一段時間的震盪,此時 並不適合再次作噴墨的動作,需要讓其穩定下來後再作下一次的噴墨動 作,才會有好的墨滴行為被重現。. 圖 2.5 噴孔驅動行為示意圖. - 10 -.
(24) 2.4 工業用噴墨系統架構 一個噴墨系統由以下幾個模組所組成,主控噴墨的機制包含有電腦上控 制噴墨程序的操作軟體、作噴印資料處理的 DSP、噴頭驅動類比電路模組 以及噴墨頭。另外鑑於噴墨技術落實在工業應用上需要參照結合該工業應 用製程的要求,針對於整體的環境控制也是缺一不可的,其將包含墨水的 溫度控制、壓力控制、噴頭噴孔的清潔方式,在實施噴墨時其影響相關上 下游製程的因素都要在架設一座噴墨系統時,需要詳細的規劃與考量。 將主控噴墨的系統機制作一個層次分類,如圖 2.6 所示,將噴印系統分 成四個層次,其可以分為噴印控制模組、噴頭驅動模組、噴墨頭模組與觀 墨模組。 噴印控制模組為噴印系統的最上層(圖 2.6 a.),包含一個在電腦上發展的 應用程式以及控制底層硬體的 DSP。前者其將掌控所有相關的噴印系統直 接與間接的模組,主要包含影像輸入的解碼、影像邊緣修飾處理、輸出解 析度的列印資料排整處理、噴墨頭的資料分配、列印資料壓縮傳送;控制 硬體的 DSP 程式,其主要包含列印資料的解碼,列印資料的管理、控制硬 體動作時序的控制以及噴頭驅動條件的設定;其他還包含所謂噴墨平台的 運動控制,環境條件溫度壓力控制與監測等。 在噴印控制模組的下一層即為所謂的噴墨驅動模組(圖 2.6 b.),其主要是 接受噴印控制模組的資料與命令,適時的輸出並驅動一個或多個噴墨頭(圖 2.6 c.)的電力與信號,使得噴墨頭在一個噴印基板上可以正確而且精準的噴 印墨滴,以目前所被實施的驅動電路模組的作法,不外乎以兩大類為大宗, 第一種作法是為一個噴頭上所有的噴孔皆由一個驅動源來驅動,此種作法 的優點是單純而可以描述所有的驅動條件細節的作法,一般會需要一顆能 夠在高壓下操作一定程度的電流的運算放大器(OP)來作驅動電路模組的 - 11 -.
(25) 基礎,在噴墨頭上每個噴孔的壓電材料會依這電流的變化作充電或是放 電,缺點是當噴頭製造上各噴孔之間存在製造公差,在這樣的驅動條件下 是會影響噴頭各噴孔的噴印結果;第二種作法為將每顆噴頭上的每一個噴 孔都有設計有屬於該噴孔的驅動電路,彼此之間皆可以獨立決定驅動參 數,這種驅動電路的作法相較於前種是比較複雜的,但是其卻可以補足之 前的缺點,也就是當驅動噴孔發生噴頭本身存在的誤差時,是可以透過補 償機制將該誤差補償回來。 噴墨品質監控機制 (圖 2.6 d.),乃利用 CCD 以及閃燈的控制在噴墨命令 下達時擷取飛行墨滴的影像,視墨滴成形的狀況及時的修正噴墨的參數, 以能到理想的墨滴噴墨行為為目標,最終得到最佳的驅動波形以及環境條 件,這些種種有串連關係的噴墨機制,在一個完整的噴印系統上皆是必備 的。利用墨滴噴出飛行的成形的過程中的一個時間點,開啟閃燈並擷取 CCD 所擷取到的影像,依照目標體積或是目標速度作為觀測的準則,解析並調 整每一個噴孔的墨滴與目標值接近,並使噴孔與噴孔之間的變異達到最小。. - 12 -.
(26) Printing Controller. a. 噴印控制模組. Control & Communication port. b. 噴頭驅動模組. Head Driver PV. NV. Driving Signals & Power lines. c. 噴墨頭模組 IJ Printing Heads Assembler. d. 墨滴觀測模組 Strobe capture. 圖 2.6. 噴墨系統的架構方塊圖. 在本文第 2.3 節中有提到一般的驅動壓電是噴墨頭的驅動波形是梯型 波,如圖 2.7 的波形所示,在這個波形裡主要分成三段時間區段,分別為 1) 爬升時間(Trise):主要是要使每一個噴孔所對應壓電元件產生形變,讓 噴孔墨水艙室的容積增加並使得墨水得以補充注入,過程中需要注意所驅 動的噴頭壓電特性之反應程度是否跟的上,一直到需要操作的目標電壓 Vch 為止,我們將這個過程所需要的時間定義為 Tr。 2) 持續時間(Thold):在進行充墨的過程,即使當壓電元件依照驅動電壓 的輸入完成形變,但是墨水卻不會即時的反應並充滿全部的艙室容積空 間,而且是尚需要等待流體在艙室內的充墨反應充滿,並且艙室內壓力處 於穩定之狀態,所以我們需要一段維持並等待穩定的時間,其一般會達到 數個微秒(µs)。我們將這個過程所需要的時間定義為 Th。 3) 下降時間(Tfall):經過前兩段時間的動作與醞釀之後,接續的是經過這 - 13 -.
(27) 段波形下降的時間,噴孔的壓電材料的反應會將壓電元件之前因為輸入電 壓的所生之變形回復成原穩定狀態,所以之前所撐開的艙室容積會收縮回 復成原來未被施力之前的狀態,而擠壓墨水使得墨滴從噴孔被射出來,這 段時間理想上希望是越短越好,成形的墨滴將會越趨近於完美。我們將這 個過程所需要的時間定義為 Tf。. Voltage Vch. Time(us) Tr 圖 2.7. Th. Tf. 壓電式噴墨頭之驅動基礎波形. 在驅動電壓波形輸入到噴孔的同時,墨滴的形成的過程配合如圖 2.7 以 及圖 2.8 所示,在電壓爬升一直到下降之前流體艙室會進行充墨(Refill), 此時噴孔流體艙室內的壓力呈現負壓的情況,其將會從墨水源引進填入墨 水,同時噴孔的墨水液面(Moniscus)會因為負壓的關係會向內縮入成一個 半月形的液面。當驅動波形要執行下降之際即是射出墨滴之時,該流體壓 力會因為流體本身的黏滯力(Viscous)以及流體與噴孔材料之間的表面張 力 (Surface tension) 的 關 係 , 當 壓 電 元 件 擠 壓 艙 室 產 生 壓 力 ( Acoustic Pressure)使流體向前推擠之時,因為黏滯力、表面張力以及流體對墨滴脫 離慣量的動能(Dynamic Pressure)產生牽引,而導致墨滴最終將拖者尾巴 離開噴孔[9][10]。. - 14 -.
(28) Moniscus Surface tension (≈< 0.1 atm). Jetting Acoustic Pressure. P Viscous Pressure loss (≈ 0.5~1 atm). Dynamic Pressure (≈ 0.5 atm). Refill. Data source form Jens Ducrée and Roland Zengerle. 圖 2.8. 噴孔產生墨滴的過程. 若是在一定的噴孔結構之下,當所給予的驅動條件是不合適時,會衍生 一些我們所不預期發生的狀況更加嚴重,如衛星點、墨滴飛行方向的偏斜、 甚至於噴不出墨滴來。在一些訴求高階製程的工業應用的要求,如顯示器 相關製程的製造等,對於墨點的體積的要求會越來越小,噴孔與噴孔間的 誤差量亦被希望會越來越小,存在噴頭製造上的公差所造成的效應之下, 需要被驅動機制所補償或是噴頭製造本身的能力有所提升才能克服各種目 前看到的問題。於是本文闡述一個可以針對每一個噴孔具獨立驅動能力, 並且適用於廣範圍的壓電噴頭之壓電特性的驅動電路設計,稱之為具獨立 可調變控制驅動波形之噴墨驅動系統(Addressable Waveform Trimming Circuit system, AWTC)。. - 15 -.
(29) 2.5 實驗架設 建立一套具獨立可調整各噴孔參數的驅動系統之噴墨系統,進行所有的 實驗與驗證。本噴墨實驗系統的架設如圖 2.9 所示,其包含有一個電腦控制 程式將可以對噴頭驅動模組設定噴墨參數,並可以即時的更改各個噴孔的 驅動波形條件,以及可以對於噴墨墨水溫度、壓力要求進行控制與設定, 本程式以 Labview 設計驅動控制與觀測墨滴的軟體,主要進行 AWTC 命令 與資料的輸入與墨滴影像的攫取與分析;AWTC 為本論文中實施噴墨頭噴 孔驅動的驅動電路,該設計將會在第三章裡作詳細的說明,其可以適用於 寬廣壓電等效電容範圍的噴頭,並依照各噴頭上噴孔的特性進行個別獨立 之驅動噴墨控制;背壓控制是使墨水在噴頭噴孔的壓力得以維持,不至於 因為壓力或引力的關係而滲出噴孔;本噴墨系統中所使用噴墨頭是一個可 以做到 Drop On Demand 特質的噴墨頭,並且開放個別噴孔驅動的介面; CCD 是為擷取墨滴影像所用的,其因為觀測的需要必須建立 60 倍之高倍數 物鏡,將所擷取影像之解析每一個像素等同於 0.4µm,而且可以在離墨滴飛 行路徑 10cm 的地方進行墨滴的觀測。配合墨滴的射出時機加上閃光燈的照 射,讓墨滴的影像可以呈現在影像擷取畫面上,以進行墨滴行為的分析。. 圖 2.9. 噴墨實驗系統之架設 - 16 -.
(30) 第3章 可調變驅動波形之噴墨驅動系統設計. 3.1 介紹 在噴墨系統中高階之噴墨工業應用裡,在穩定噴墨製程的基本要求下, 驅動補償噴頭上每一個噴孔所噴出墨滴的變異,讓所有噴出的墨滴都具有 最高的一致性,將會是必要的。 造成噴出墨滴的差異原因可能有以下幾個,其一可能為噴頭本身製造的 精度問題、可能是噴頭或是供墨墨水流道設計的問題、亦可能是噴孔製造 所產生的公差問題,讓噴頭噴孔的墨滴在噴頭上就已經存在噴墨行為的差 異;其二可能為噴頭維護的程序問題,因為墨水與噴頭噴孔片表面是會有 材料相容性的考量的,表面張力或是墨水黏度的問題,讓噴孔在經過一段 噴墨動作的時間之後,某些噴孔會呈現差異化的噴墨行為,也許造成墨滴 大小不一,或是造成墨滴飛行方向的偏移。 本章節針對驅動電氣控制的角度,進行控制補償的作法與方式進行探 討,使用可調變噴孔獨立的驅動波形之電路與方法,以降低墨滴在各噴孔 上成形時所存在的差異。先前的研究,例如“Minimizing residual vibrations and cross-talk for inkjet print heads using ILC designed simplified actuation pulses”的研究,其發展出一種 ILC (Interactive Learning Control)方法[11],其 降低墨滴變異之驅動過程中,探討主觀察的驅動噴控孔對其鄰近噴孔的影 響,如下圖 3.1、3.2 所示,其建立在標準梯型波驅動之下,驅動噴墨頭的 主要觀察的噴孔壓電元件,觀察該噴孔之壓電感測器反應的訊號,以及其 - 17 -.
(31) 相鄰近噴孔壓電元件之壓電感測器受影響的情形,進行實際量測與理論值 的差異的分析與探討。而圖 3.3 則為 ILC 控制的方塊邏輯。 該文中表示,藉由 ILC 控制是可以有效的抑制 Cross-Talk 的行為,但亦 僅止於驅動波形與壓電 Actuator Response 間的行為探討,未針對真實的 Jetting 條件與墨水成形的狀況作回饋的觀測與調整控制。. 量測(黑),模擬(灰). 圖 3.1 在 ILC 方法之標準波形之下被驅動噴孔的反應行為. 量測(黑),模擬(灰). 圖 3.2. 在 ILC 方法之標準波形之下驅動之相鄰噴孔反應行為 - 18 -.
(32) 圖 3.3 ILC 控制的方塊邏輯. - 19 -.
(33) 3.2. 驅動電路原理. 針對壓電式噴頭的電路特性,每一個噴孔都是一個獨立的個體,因為其 等效電路即為電容與電阻的並聯模型,所以在給予電能使壓電材料產生形 變的目的之下,對電容器作充電與放電的動作,將是對驅動壓電式噴墨頭 最直接也是最唯一的方法,其電容的充放電的效應在基本電學裡告訴我 們,當電壓輸入電容電路時,其將依充電路徑上的電阻與電容本身的值, 決定充電的時間常數,而放電時亦依該原則決定放電的時間常數,如圖 3.4 所示,當電路中的 SW1 在 t0 作閉合,Vi 透過 Rc 對 C 充電,其電壓變化的曲 線依照指數上生的趨勢進行充電的行為,並且在經過 5 倍的充電時間常數 之後達到充電最大值。. 圖 3.4. 電容充放電原理. 電容充電的電壓與電流變化方程式(3.1)、(3.2) Vc = Vi (1 − e. −. t Rc C. ). (3.1). t ≥0. t. V −R C ic = i e c Rc. (3.2). t ≥0. - 20 -.
(34) 其中 RcC 為充電時間常數,可定義為 τ c = Rc C 。而放電的情況會在當 SW1 開啟之後,SW2 在 t1 時閉合,之前電容 C 所充的電能將透過 Rd 的路徑進行 放電一直到完全沒電為止,會經過一段放電時間為 5 倍放電時間常數,電 容放電之電壓與電流之方程式(3.3)、(3.4)所示,其中 RdC 為放電時間常數, 可定義為 τ d = Rd C ,充放電曲線如圖 3.5 所示。 V d = Vc e. −. t Rd C. (3.3). t ≥t1 t. − V id = − c (1 − e RcC ) t ≥t1 Rd. (3.4). 圖 3.5 電容充放電之電壓與電流曲線. - 21 -.
(35) 依照這個原理,我們將噴頭上的壓電噴孔接上一對開關,並對這一對開 關作時間上的控制,使得在噴孔上施以的電位可以透過這樣的方式進行控 制與調整,該機制如圖 3.6 所示。 Vc Vi (High Voltage) Vi. Sig1. Vnozzle 5τc 0. 5τd. Vc. Sig1 Sig2. SW1. Nozzle. SW2 Sig2. 圖 3.6 噴孔驅動電路原理 控制 Sig1 的狀態,將可以決定 SW1 開啟的充電時間,進而可以決定該噴 孔所需的電壓(Vc);而電壓曲線爬升的狀態是依據電阻與電容本身的數值決 定,並無法在這樣的架構之下進行爬升曲線細節的控制。當墨滴需要射出 之時,即是將 SW2 開啟,控制 Sig2 的信號就可讓放電的路徑呈現通路,得 以釋放壓電噴孔先前所被充入的電壓能量。. - 22 -.
(36) 3.3 電路模擬 針對噴墨頭之壓電噴孔模型進行驅動電路的設計模擬,此噴頭電路模型 為一電容與電阻的並聯電路,其中所設之電容值則依各廠商噴墨頭的規格 所定,其電容與電阻值的範圍會依照壓電元件外型設計而有所不同,以致 於不同的噴墨頭需被設定不同的等效電容值與電阻值。圖 3.7 電路是針對正 高電壓驅動之噴墨頭所設計的,使用一對電晶體來作控制電容充放電的開 關,電晶體 Q1 是為對壓電元件進行充電的開關,而電晶體 Q2 則是針對壓 電元件作放電的開關。每一個壓電元件被充放電之速率是分別取決於各噴 墨孔的 R1、R2 與 CL、RL 的大小。控制開啟電晶體的數位控制訊號分別為 Sig1 與 Sig2,噴孔壓電元件動作順序如下所示: 1. 開始作動之前其兩個控制訊號 Sig1 與 Sig2 初始皆位於 High 的狀態, 此時壓電元件被 Q2 強制接地,以避免浮動的電位對於敏感噴孔的墨 滴產生不必要的困擾; 2. 噴頭充墨程序,先將 Q2 關閉再將 Q1 開啟,以對噴孔壓電元件進行 充電程序,會將壓電元件作撐開微流體艙室的容積,進行充墨。 3. 當充電到達預期目標電位時, Q1 會被關閉停止充電,並等到艙室內 墨水壓力之震盪停止後,則可以進行墨水的射出。 4. 當墨水要射出之時,則將 Q2 開啟,迫使壓電元件作放電的動作,即 完成一次壓電元件噴墨之動作。 5. 如此反覆之程序,就可以使壓電噴墨頭之噴孔不斷地噴出墨滴來。. - 23 -.
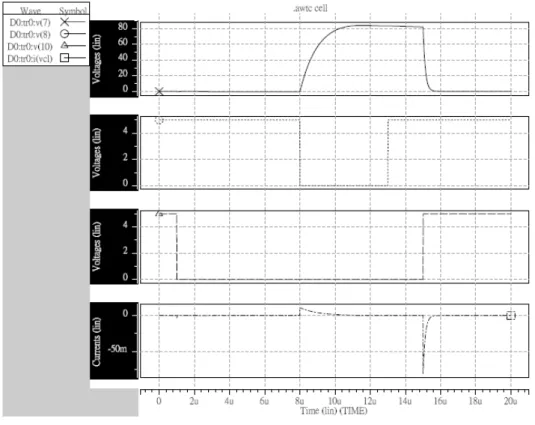
(37) + 90V 1 R4 Sig1. 8. Cin. 9. R3. Q1. 3. 4 R1. 0V 11. 7 R2. Sig2. 10. RL. 6. 5 R5. CL Q2. 2. 圖 3.7 驅動電路模擬 以下將針對圖 3.7 電路進行實際模擬,使用之電晶體為市售之 IC 元件, 取得元件之 Model 以進行之電路特性模擬,其他元件有 R3、R5 為 220Ω; R1=8KΩ;R2=1KΩ;Cin=0.56nF;假設 CL=0.12nF,RL=1MΩ 以符合噴墨頭 廠商所提出壓電噴頭之壓電元件規格。另外為了分析充放電電流,在充放 電路徑上串聯一個 0V 的電壓源。使用電源為+90V,電路節點分別編號為 1~11。依據上面的電路參數帶入 SPICE 進行模擬,其模擬結果如圖 3.8~3.10 所示。. - 24 -.
(38) 圖 3.8 動作模擬狀況—充電時間為 5 微秒(大於 5τc) 圖 3.8 為使用 SPICE 模擬之波形,模擬時間長為 20µs,波形之定義為 v(7) ;v(8)為 Sig1 (電晶體 Q1 之控制訊號);v(10) 為 為 V(壓電噴孔之工作電壓) c Sig2 (電晶體 Q2 之控制訊號);i(vcl)為壓電元件之充放電電流。模擬中固定 Sig2 的開啟與關閉的時間,調整 Sig1 開啟的時間作為觀察輸出電壓變化的變 數。當 Sig1 開啟的時間設定為超過 5 倍時間常數 τc 的 5µs 時,可以看到 v(7) 的充電最大值到達約 85V 左右,充電電流瞬間最大值約 11mA,放電電流 瞬間最大值約為 81mA。 當我們將當 Sig1 開啟的時間設定為 2µs 時,v(7)的充電最大值降至約 78V 左右,充電電流瞬間最大值一樣維持約 11mA,但是放電電流瞬間最大值已 經降至約為 71mA,如圖 3.9 所示。. - 25 -.
(39) 圖 3.9 動作模擬狀況—充電時間為 2 微秒 當我們再把 Sig1 開啟的時間設定為 1µs 時,v(7)的充電最大值再降至約 60V 左右,充電電流瞬間最大值一樣維持約 11mA,但是放電電流瞬間最大 值已經降至約為 56mA,如圖 3.10 所示。. 圖 3.10. 動作模擬狀況—充電時間為 1 微秒 - 26 -.
(40) 針對不同的電晶體 Q1 開啟的時間其操作範圍為 0~5µs,觀察噴墨頭噴 孔壓電元件充電電壓的情況,如表 3.1 與圖 3.11 所示,歸納該充電曲線之 指數方程式為 t − ⎛ ⎞ 0 . 788 ⎟ t:unit ( us ) VC = 84.2⎜⎜1 − e ⎟ ⎝ ⎠. (3.5). 表 3.1 開關開啟控制時間與充電電壓之關係表 Q1 開啟 (µs) VC 充 電(V). 0. 0.15 0.31 0.32 0.45 0.5 0.51 0.55 0.65 0.75 0.85. 1. 2. 4. 5. 0. 19.3 29.6 30.8 38 40.5 40.9 42.8 47.2 51.3 55 59.8 77.9 84.2 84.2. 充電曲線. Voltage(V). 90 80 70 60 50 40 30 20 10 0 0. 1. 2. 3. 4. 5. 6. Q1開啟的時間(us). 圖 3.11. 模擬壓電元件之充電曲線歸納. 綜合以上電路模擬的結果,噴墨頭噴孔壓電元件充電電壓的位準是可以 由 Q1 開啟的時機來掌控。就模擬所看到的結果,噴墨頭等效電容值為 120pF,充電電阻在 8KΩ 時,若其操作電壓範圍 30~80V 之間,電壓精度要 到達±1V 之內,調整的充電時間之最小刻度需要在 10ns 左右方可達成。 - 27 -.
(41) 3.4 驅動電路架構 依照噴墨頭驅動的原理與電路設計模擬的依據,驅動電路的架構可分成 三個部分,如圖 3.12 所示,分別有驅動開關電路、FPGA 控制晶片、電壓 迴授電路[12]。其中第一個部分為驅動開關電路,在每一片驅動模組建立 64 個獨立噴孔的驅動開關電路,這樣的設計可依照各種不同的噴頭噴孔數 量,進行彈性的系統擴展;另外依照不同的噴頭噴孔之等效電容值,可以 預先決定合適的充電放電電阻,讓控制的驅動電壓之充放電行為可以符合 噴頭的基本特性要求。第二部分為 FPGA,該內部 HDL Code 之設計包含通 訊、噴印資料處理、電壓控制機制、迴授判斷控制、多模組交握機制、以 及噴頭溫度控制等,這些基礎的模組在配合下一節所提之驅動電壓控制校 正流程,可以將因噴孔本身的差異導致驅動的墨滴不一致的情況降到最 低,以找到最合適的驅動補償條件。第三部分為電壓迴授的電路,目的是 在作校正噴孔驅動電壓時,將各噴孔所被施予驅動電壓的位準能夠在精準 的迴授控制之下,得到最佳墨滴形成的行為。. (a). - 28 -.
(42) (b) 圖 3.12. 獨立噴孔驅動電路架構圖,(a)實體圖 (b)架構圖. 在 FPGA 內部 HDL Code 控制機制方塊圖,如圖 3.13 中所示,包含通訊, 資料的接收、資料的輸出、電壓的調整、噴孔的指定、所有墨滴射出的時 機、數位控制的時間與類比電壓的關係表、電壓迴授監控、以及 PWM 的溫 度控制等等,主要由控制狀態機(Control FSM)來決定,接收命令資料之 後,依照命令解碼之命令種類,執行不同的工作模式。. 圖 3.13. 獨立噴孔之驅動控制晶片架構 - 29 -.
(43) 所設計控制的流程架構如圖 3.14 所示,而設定程序關係圖如圖 3.15 所 示。本設計因應工業應用的需求,以工業應用成熟的 UART 介面做為指令 之通訊媒介,硬體電路中的控制狀態機(Control FSM)將依照 UART 解碼 所得的指令形式進行動作的判別與流程控制,其指令的種類有”初始設 定”( Initial setting command)、”參數設定”(Parameter setting command)、”校 正之自我調整設定”(Self-tuning command)、”校正之使用者特定噴孔調整設 定”(User-tuning command)、”觀墨閃頻設定”(Strobe firing command) 以及” 噴頭溫度設定”(Thermo control command)。而所設計工作模式有”初始設 定”(Init setting)、”驅動電壓校正程序”(Calibration process)以及”噴印工作程 序”(Working firing process )等,以上所有的指令細節可對照表 3.2 指令說明 表所述。. IDLE. Process Finish =1. Rx_IRQ =1. Inst. Decode. Process. Decode_done =1. Instruct Type: Initial setting command Parameter setting command Self-tuning command User-tuning command Strobe firing command Thermo control command. 圖 3.14. Choose a work process: Init setting process Calibration process Self-tuning User tuning Working firing process. 獨立噴孔之驅動控制 FSM. - 30 -.
(44) Green item: The Input command of AWTC Blue item: The status response of AWTC. 圖 3.15. 工作模式與指令分類與操作程序關係圖. 表 3.2 控制命令表 Initial Setting Command Command message Code Set Board Number per 0x00 0x23 Head 0x42 0x4E ------ 0x25 Set Nozzle Number 0x00 0x23 0x4E 0x5A ------ 0x25 Set Max Voltage 0x00 0x23 0x4D 0x56 ------ 0x25 Circuit Rate. 0x00 0x23 0x43 0x52 ------ 0x25. Descript 設定每個噴頭需插幾塊 板子數. Size 1. Data 1~4. 設定目前使用之噴頭噴 孔數. 2. Value: 0 ~ 255. 設定目前最大電壓限制, 供硬體判斷噴孔瑕疵, 超過此最大電壓則表示 噴孔為壞孔 收到 Get Rate 命令後回 覆電路內部的 RC 參數. 1. Value: 0~255. 1. Value: 0~255. Parameter Setting Command n 表示電路板編號,1為第1塊電路板 Command message Code Descript Write Parameter 0x?? 0x23 設定第 n 個噴頭的噴孔 0x57 0x50 參 數 , 傳 送 所 有 噴 孔 ------ 0x25 Voltage 參數 Setting Down 0x?? 0x23 本噴頭所有參數皆 設定 0x53 0x44 完成 ------ 0x25 Read Parameter 0x?? 0x23 讀取此噴頭所有噴孔之 0x52 0x50 Counter 值 ------ 0x25 - 31 -. Size N. Data Value: 0~255. 0. -. 0. -.
(45) Self Tuning Command Command message Self Tuning Nozzle of NG Status. Self Tuning Finished. User Tuning Command Command message User Tuning. Counter Number. Nozzle Voltage. User Tune Stop. Strobe Firing Command Command message Strobe Firing Enable. n 表示電路板編號,1為第1塊電路板 Code Descript 0x?? 0x23 開始進行 Self Tune 0x53 0x54 ------ 0x25 0x?? 0x23 Self Tune 完成後,僅傳送 0x4E 0x47 此噴頭 NG(No Good)噴 ------ 0x25 孔之編號 0x?? 0x23 0x53 0x4F ------ 0x25. 完成 Self Tune. n 表示電路板編號,1為第1塊電路板 Code Descript 0x?? 0x23 進行 User Tune 各別噴 0x55 0x54 孔的編號 ------ 0x25 0x?? 0x23 進行 User Tune 噴孔的 0x55 0x43 Counter 數值 ------ 0x25 0x?? 0x23 傳送目前噴孔之電壓 0x4E 0x56 值,每次 User Tune 後回 ------ 0x25 傳此噴孔所達到的電壓 0x?? 0x23 停止 User-Tune 動作, 0x55 0x53 AWTC 回到 Idle 狀態 ------ 0x25. Code 0x?? 0x23 0x46 0x45 ------ 0x25. Strobe Firing Disable. 0x?? 0x23 0x46 0x44 ------ 0x25. Strobe Firing Frequency. 0x?? 0x23 0x46 0x46 ------ 0x25. Descript 開始觀墨時的噴印功 能,可由使用者設定適 當的噴印頻率來做噴印 停止觀墨時的噴印功 能,可由使用者設定適 當的噴印頻率來做噴印 設定觀墨時噴印的頻 率,AWTC 預設為1KHz. - 32 -. Size 1. Data Value: 0~255. 2. Number of Nozzle for NG status -. 0. Size 2. Data Value: 0~255. 1. Value: 0~255. 1. Value: 0~255. 0. -. Size 0. Data -. 0. -. 2. Min: 5000,10K Hz Max: 50000,1K Hz.
(46) Heat Setting Command Command message Setting Heater Objective Temp Setting Heater Alarm Temp Heat Enable Heat Disable Get Temperature Now Temperature. Heat Alarm. n 表示電路板編號,1為第1塊電路板 Code Descript 0x?? 0x23 設定噴頭加熱器的目標 0x54 0x4F 溫度 ------ 0x25 0x?? 0x23 設定噴頭加熱器的警示溫 0x54 0x41 度 ------ 0x25 0x?? 0x23 開始進行噴頭加熱 0x48 0x45 ------ 0x25 0x?? 0x23 停止噴頭加熱 0x48 0x44 ------ 0x25 0x?? 0x23 讀取此噴頭目前之溫度 0x47 0x54 ------ 0x25 0x?? 0x23 收到 Get Temperature 命 0x4E 0x54 令後,傳送此噴頭目前之 ------ 0x25 溫度 0x?? 0x23 當噴頭過熱時,AWTC 0x48 0x41 會發出此一警告訊號,並 ------ 0x25 回傳此時噴頭溫度. Size 1. Data Value: 0~255. 1. Value: 0~255. 0. -. 0. -. 0. - Value: 0~255. 1. Value: 0~255. 模組電路之間 Board to Board 的介面之設計,是為了因應模組作系統擴 增之用。在實際噴墨頭的驅動上,一顆噴墨頭中會有多少個噴墨孔是不一 定的,其噴孔數量並非是一個諸家制訂的標準,反而一個噴墨頭上的噴孔 數量與排列會是為因某一種特殊應用的需求而設計的,在這樣的環境之下 我們需要保留一個彈性的機制,讓驅動模組是可以依照實際的需要而有所 增減驅動噴孔數量的能力。需要管理各驅動模組之間的動作與運作,所以 內部會界定所謂 Master Board 以及 Slaver Board,讓 Master Board 來接收並 分配相關的命令資料與訊息,包含噴孔參數,噴印資料以及需要多少個噴 孔等等。 以下針對於驅動電壓校正之自我調整程序(簡稱自我調整程序, Self-tuning)與校正之使用者特定噴孔調整程序(簡稱使用者調整程序, User-tuning)作說明。所謂自我調校之校正程序(Self-tuning)的目的是為了 - 33 -.
(47) 讓所有噴孔上的驅動電壓皆可到目標設定值。依照 AWTC 設計的工作模 式,當控制訊號開啟的時間一樣長之下,對應到不同噴孔的壓電元件之電 容值時,將會有不同的充電電壓發生每一個不同電容值的噴孔上。對於初 使用的噴墨頭時,最好是經過這一個機制讓每一個噴孔依照其本身的等效 電容特性,讓驅動器調整應該要有的充電時間,使得輸出到噴頭上的每個 噴孔壓電元件上都有一樣的驅動電壓,此機制就是我們所謂的 Self-tuning。 所謂使用者調整程序(User-tuning)的目的是在繼 Self-tuning 之後,在其 調整工作電壓已是一致的基礎下,將一些特有的或表現較為弱的噴孔再作 一些驅動電壓能量的調整,因為噴頭零件製作公差的關係,造成噴頭上的 流道參數或是等效電容的差異,Self-tuning 的充電補償是可以對於等效電容 的電氣特性之補償,但是不代表流體參數也是可以補的過去,所以在此需 要針對特定噴孔的噴墨行為再作驅動條件的調整,這個調整程序的迴授是 以 CCD 影像擷取的方式,來判定墨滴的實際的差異,進而再作應該作的補 償,調整特定的噴孔使其成為與一般其他噴孔有一樣的噴墨行為狀況。 SPI 是接收噴印資料的資料格式,是一個串列傳輸資料的介面,其資料 內容代表所要驅動的噴墨頭其每一個噴孔的資料形式,如圖 3.16 所示,假 設一個噴頭有 128 個噴孔時,其所有需要傳輸的資料一共有 128Bits 的資 料。為了節省傳輸所耗的時間,我們將串列的資料分成兩的部分,一為奇 數位元資料,一為偶數位元資料,分開同時傳送如此將可以節省一半的資 料傳輸時間,又可以彈性的應付各種不同噴孔數量的資料輸入問題。當資 料接收完成時,就會等待一個噴墨驅動的時機點,當因為噴墨平台或是被 噴印的基板移動至應該噴印圖像的位置時,AWTC 就會依照所接收到資料 狀態,進行各噴墨孔壓電元件之獨立驅動波形的輸出。. - 34 -.
(48) 圖 3.16. 噴印資料 SPI 格式. - 35 -.
(49) 3.5 電壓校正流程 透過以下的一個流程的設計,配合這個具有獨立驅動參數調整的墨滴噴 墨系統操作指令集的指令,使驅動模組得到輸出獨立個別適合於每一個噴 孔的驅動電壓至各獨立的噴孔上,如此將可以把噴墨的行為的變異性降到 最低,得到最佳的噴墨品質。其程序如圖 3.17 所示,其中的各程序說明如 下所示: 1. Init Setting: 設定驅動波形的電壓與波形時間寬度等條件,以及墨水 操作溫度。 2. Self-tuning: 依照 Init Setting 的驅動波形條件進行自動調整對噴孔壓 電元件的充電時間,讓所有的噴孔在電容值不同的情況 下都可以透過開啟充電時間的差異,到達各噴孔預定的 目標電壓。除了正常的噴孔校正驅動電壓之外,噴孔損 毀壓電元件無法作動時,系統都會將所有的噴孔記錄下 來,後續回傳給上位的噴墨控制器。如果噴頭已經做 過,這個程序也可以跳過不作,直接下載驅動條件即可。 3. User-tuning: 在 Self-tuning 之後,每個噴孔都在一個均等的驅動電壓 條件之下,透過觀墨系統審視噴孔噴墨的情況,檢視墨 滴的體積或是飛行速度,視察特定不夠理想的噴孔之墨 滴作特定的調整,讓每個噴孔皆可以噴出墨滴品質接近 的效果。. - 36 -.
(50) 4. Store Parameter / Load Parameter: 針對噴墨頭上所有的噴孔的驅動參 數,進行上傳並在上層噴墨控制器上作儲存,或是由上 層噴墨控制器提供噴墨頭參數讓使用者進行下載。 5. Firing / Strobe: 接收噴印資料進行噴印,或是同時啟用閃光燈來進行 噴墨時的觀墨,以利驅動電壓條件的校正與調整。. AWTC Begin UT Init Setting Set Temp, Firing Volt, Waveforms,. LD. N. User Tuning Special nozzle abject Amplitude or full timing. New Calibration?. N Y. User tuning Quit ?. Self-tuning Tune equal voltage for every nozzle. LD Y. N. Load Parameter. Store Parameter firing condition. Finish self-tuning? N Y. Run Firing or strobe. Choose User-tuning or not?. N. Y. Finish firing?. UT Y. AWTC End. 圖 3.17. 噴墨噴孔電壓校正流程. - 37 -.
(51) 第4章 實驗與分析. 4.1 噴墨光學觀測系統 噴墨系統的測試是需要架構在具有觀墨能力的系統上,這個系統包含了 噴墨頭、噴墨驅動系統、噴墨控制系統、噴墨觀測系統以及穩定的供墨系 統,實驗的實體架設如圖 4.1 所示。我們的量測實驗架構在 Dimatix 與 Trident 的噴頭上,進行噴孔參數獨立的驅動調校並作墨滴行為的分析,以達到個 別獨立噴孔驅動調校的作法的效能,使得噴出墨滴的大小可以均一化,而 達到在高階的工業應用場合裡可以得到良好的噴墨品質。 目前手邊可拿到的這兩家噴墨頭的設計有著截然不同的結構,其一 Dimatix 的噴頭其噴孔壓電元件之工作模式是 Shear mode,而其二 Trident 則為 Push mode。其噴孔數學模型是盡不相同的,以其等效電容值而言,範 圍介於 120~560pF 之間,其差異頗大。但是透過這樣的驅動系統與調校程 序,其結果是可以滿足驅動的特性與要求,讓結果可以上噴出的墨滴之均 勻性達到最好。 墨滴特性分析將透過高倍率的 CCD 擷取系統,以取得噴孔射出之飛行中 的墨滴,將該墨滴的影像進行分析並計算其體積以及飛行速度,如圖 4.2 所 示。. - 38 -.
(52) 圖 4.1. 圖 4.2. 噴墨頭驅動系統與觀測系統. 觀測系統之墨滴特性分析程式. - 39 -.
(53) 4.2 墨滴觀測物理與調變的邏輯 調變墨滴的邏輯可以依以下的步驟進行調變: 步驟 1:建立墨滴的目標觀測區域 一般的噴墨觀墨基本要求是希望在噴孔片表面並無墨水的殘存,避免流 體脫離噴孔片時,有不穩定的表面張力拉扯的行為產生。在目標觀測區內, 將著重於墨點的飛行速度、體積、衛星液滴的產生以及墨滴拖曳飛行的尾 巴長度變化,如圖 4.3 所示。. 圖 4.3. 噴墨墨滴之優劣描述. 圖 4.4 為更具體的說明[9],在 0.2 ms-0.7 ms 間以不同的取像時間觀測, 看到流體自噴孔噴出的行為,存在拖著長柱型尾巴的液滴應隨時間逐漸收 縮該尾巴成為圓球體。在成為球體的情況下才能量測並計算墨滴的體積 值,分析各墨滴體積之誤差值作為迴授調整波形的控制基礎。在圖 4.4 中之 墨滴射出呈現分裂狀況之下,則無法作為控制變異的參數調整。應先將墨 水性質以及其基本驅動條件,作適度的改變,以讓噴出的墨滴可以建立在 一穩定的情況之下,再進行分析。. - 40 -.
(54) 圖 4.4. 驅動噴孔之不良的墨滴射出情況. 步驟 2: 觀察單一噴孔在選定一個標準驅動波形之下驅動噴孔,依不同 的取樣時間操作,觀察其墨滴飛行速度的線性度。 原理: Rayleigh Instability Behavior,墨滴具有過大的表面張力會影響驅 動的能量,其主要是因為墨滴會受到表面收縮的力量的牽制,其是與墨滴 要被射出的方向相反[9]。 假設理想無揮發的墨滴,並在牛頓流體行為之下,其在不同的取像時間, 則觀測到的結果應如圖 4.5 所示。. B A. B D. E. C A 圖 4.5. 墨滴飛行分析圖. 墨滴飛行的情況若良好時,其應平行於 AA 線段的線性之穩定狀態;若 所觀測到的結果,並不平行於 AA 線段,表示有其他不樂見的環境影響力 去影響了噴墨的結果。例如假設觀察到的是曲線 AC 時,則可能產生的原因 是由於周圍環境氣流的變化,或者因為揮發所造成的墨滴收縮,使得相同 - 41 -.
(55) 的出口動量,因為質量揮發的改變或是氣流的其的影響,而使得墨滴有些 微的加速。一般而言,此噴墨的力量約為 velocity2*Area 。若 A-A // B-B, 代表的是符合牛頓流體的行為,當一噴墨流體受到剪切力作用時,其黏滯 性並無實質的改變;若觀測到的結果 AA 並不平行於 BB,代表該噴墨流體 屬於非牛頓行為。舉例來說,當 AA 曲線與 BD 曲線間的流體收縮型態,其 代表的意義為相對的高表面張力/低黏滯性比,也就是 Weber/Reynold 值較 高;反之,若呈現為 AA 曲線與 BE 曲線間的流體收縮型態,其代表的意義 為相對的低表面張力/低黏滯性比,也就是 Weber/Reynold 值較低。. - 42 -.
(56) 4.3 驅動波形輸出的量測 本設計的噴墨驅動系統,其驅動壓電式噴墨頭之輸出波形是可以讓每一 個噴孔可以獨立調整的。所以以下設計幾個實驗檢視驅動的實際結果。 A. 單一噴孔驅動: 每一個驅動波形針對不同的電容性負載作驅動實驗,檢視其驅動波形之 情況並分析與模擬結果之對照。驅動電壓設定於 60V,分別針對以下幾種 負載作測試,包含有標準電容(120Pf)、Dimatix 的噴墨頭之單一噴孔 (120pF)、Trident 的噴墨頭之單一噴孔(560pF)進行驅動。如下圖 4.6、 4.7、4.8 所示,檢視各不同的電容性負載之驅動波形情況的分析: 1. 驅動波形與模擬結果相符合,對於標準電容的驅動與 Dimatix 的噴墨 頭驅動波形相似,因為該壓電元件之等效電容值與標準電容相近約 為 120pF 左右,差異是在於壓電元件上有一個等效並聯電組,但是 就者兩個波形差異並不大,表示 Dimatix 的等效並聯電阻的值不小, 與先前假設的電阻值趨勢相符。 2. Trident 的噴墨頭壓電元件等效電容值約為 560pF,用一樣的驅動充 電電阻時,會使得充電時間過久,需調降充放電電阻至為原電阻的 1/4,充放電曲線呈現相近的結果,但是 Trident 的噴墨頭會衍生 Overshoot 的波形,Overshoot 的比例約為 16%左右,表示這個噴墨 頭噴孔的數學模型,需要保留方程式(2.2)的第二階省略項,電感 的效應會比較明顯。 3. 當放電結束之時,Trident 的噴墨頭壓電元件並非立即停止形變,電 感的效應在較長的時間裡依然響應著,此現象將會影響下一次可以 再作噴墨動作的時間。換言之,噴墨的操作的頻率會因而下降。對 於這個問題,在上升時間的 Overshoot 可以不太以理會,其原因是不 - 43 -.
(57) 太影響充墨的效果與結果,但是驅動波形之下降波形結束後的漣波 效應,則會有所影像噴墨的墨滴行為,其可以用強制接地的方式消 除,以利這一次的墨滴射出以及下一次壓電元件的動作。. 0.7us. 60V 10us. 圖 4.6. 標準電容 120pF 之驅動波形. 0.7us. 60V. 10us. 圖 4.7 Dimatix 噴墨頭擇一噴孔之驅動波形. - 44 -.
(58) 0.7us 5KHz 60V. 60V 10us (a). (b). 圖 4.8 Trident 噴墨頭單一噴孔之驅動波形 (a)單一個週期 驅動波形 (b)多個週期驅動波形 B. 多噴孔同時驅動: 在多噴孔同時驅動的測試中,檢視驅動電壓在各個噴孔上作用時的均一 性。無論是 Dimatix 的噴墨頭或是 Trident 的噴墨頭在這樣的驅動電路,驅 動波形同時輸出至 64 個噴孔上,並依照前述之校正程序所得的調整電壓皆 為 60V 左右,其誤差皆小於±1V。量測取樣噴孔數為第 1、32、64 噴孔進 行驅動測試,量測值如表 4.1 所示,波形如圖 4.9 所示。 由此測試依照校正程序調整之後,無論是否驅動特性相近的噴墨頭,其 驅動的結果將可以依照驅動標的電壓命令作校正,目前驗證讓壓電元件之 等效電容範圍介於 120pF 到 560pF 的噴墨頭,皆可以得到準確的操作電壓 值,並得到良好的墨滴品質。. - 45 -.
(59) 表 4.1 多噴孔同時驅動量測電壓 Nozzle No. 驅動電壓(V) Dimatix 噴墨頭 Trident 噴墨頭. 1st 61.5 61.82. 32nd 61.6 61.76. 64th 60.8 61.23. 60V. (a). 60V. (b) 圖 4.9. 同時驅動 64 個噴孔之取樣噴孔波形 (a) Dimatix 噴墨頭 (b)Trident 噴墨頭. - 46 -.
(60) 4.4 墨滴體積與飛行速度的量測 利用 CCD 影像擷取墨滴飛行的影像,並計算墨滴體積大小與其飛行速度 的關係。這個觀墨機制,主要擷取的是噴孔被驅動之後正在飛行的墨滴, 觀察其飛行行為與影響噴墨製程品質的體積大小等兩個因素。影像擷取的 時間關係如圖 4.10 所示,在墨滴噴出的時間點之後,有兩個時間是需要被 控制的,其一為控制噴墨之後的取像間隔時間(Td),其二為曝光時間(Tex)。 經過調整不同的間隔時間(Td)與曝光時間(Tex),可以取得合適墨滴觀察取 像條件與墨滴清晰的影像。. 圖 4.10 影像擷取的時間關係. - 47 -.
(61) A. 變化調整充電時間觀察墨滴影像變化: 當調整驅動波形之充電時間 Tr 時,可以得到不同體積的墨滴大小,如圖 4.11 中的 4 格圖像,該時間分別為 1.7µs、1.88µs、2.06µs 以及 2.23µs, Th=10.1µs,Tf=3.6µs。從影像上可以辨析得不同的墨滴大小,即為不同的墨 滴體積,充電時間越長代表充電電壓越高,其會得到越大顆的墨滴。. (a). (c). (b). (d). 圖 4.11 (a), (b), (c), (d) 120pF 噴墨頭調整不同充電時間所得之不同大小 的墨滴 將驅動電壓作一系列的調整,讓不同的充電時間作為噴孔壓電元件差異 補償的作法。如下表 4.2 中所呈現,當充電時間越長時,電壓越高之下,墨 滴的體積也會越大,飛行速度亦越來越快,其關係以目前的正常操作電壓 的範圍內,呈線性正比的關係,如圖 4.12、4.13 所示。. - 48 -.
(62) 表 4.2 120pF 噴墨頭充電時間對應電壓、墨滴體積、與飛行速度關係表 Tr. Holding voltage. Volume (pL). Velocity (m/sec). 1.70µs. 40.2V. 11.09. 1.43. 1.79µs. 41.4V. 12.38. 1.69. 1.88µs. 42.6V. 13.61. 1.96. 1.97µs. 43.5V. 14.29. 2.31. 2.06µs. 44.6V. 15.28. 2.43. 2.15µs. 45.6V. 15.43. 2.54. 2.14µs. 46.1V. 16.26. 2.64. 2.23µs. 46.8V. 17.02. 2.77. 驅動電壓與墨滴體積關係. 體積(pL). 20 15 10. 墨滴體積 線性 (墨滴體積). 5 0 38. 40. 42. 44. 46. 48. 驅動電壓(V). 圖 4.12. 120pF 噴墨頭之驅動電壓與墨滴體積的關係. 飛行速度(m/s). 驅動電壓與墨滴飛行速度關係 3 2. 飛行速度. 1. 線性 (飛行速度). 0 38. 40. 42. 44. 46. 48. 驅動電壓(V). 圖 4.13. 120pF 噴墨頭之驅動電壓與墨滴飛行速度的關係 - 49 -.
(63) B. 同時驅動多噴孔之個別墨滴飛行速度: 在固定的影像擷取的間隔時間(Td)與曝光時間(Tex),觀察各噴孔之噴 墨情況,原來固定的驅動電壓在 42V 時,每一個噴孔噴出墨滴體積皆存在 一些差異,每一噴孔得到不同的墨低體積,其計算數值差異存在界於 11.9pL ~ 14.83pL 之間,假設以最大墨滴 14.83pL 為基準時,其各墨滴之最大的差 異為 2.93pL,約達 20%的變異量。經過獨立噴孔驅動電壓校正程序之後, 可以改變獨立個別噴孔的驅動條件,將原來 42V 驅動每個噴孔的電壓改變 調整為適合各噴孔觀墨結果的驅動電壓值,使得體積偏小的依照先前實驗 結果的規則調大驅動電壓,而體積偏大的反之。結果如表 4.3 所示,將驅動 電壓從原 42V 調整為介於 42V 與 45.4V 之間,其可將墨滴的體積調變成 14.76pL ~ 14.82pL 之間,其最大的差異將降低至 0.06pL,僅存在不到 1%的 變異量,如圖 4.14 所示。. (a). 圖 4.14. (b). 120pF 噴墨頭多孔同時噴墨之調整存在差異 前後影像 (a) 調整前 (b) 調整後. - 50 -.
(64) 表 4.3 120pF 噴墨頭經過電壓調整之後的一致化的墨滴 Holding voltage (a) 42.0V 42.0V 42.0V 42.0V 42.0V. Holding voltage (b) 45.4V 44.9V 42.0V 42.0V 42.3V. Volume (pL) (a) 11.09 12.38 14.82 14.83 14.79. Volume (pL) (b) 14.80 14.76 14.82 14.82 14.79. 4.5 驅動能力分析 在噴墨頭供應的角度裡,使用者可以要求噴墨頭的特性是有限的,以本 文中所討論的目前我們所取得的等效電容為 120pF 以及 560Pf 的兩個噴墨 頭,就其可調整的特性來說,等效電容為 120pF 的噴墨頭其操作電壓約在 40V 左右,而其噴墨墨滴的目標體積為 10pL 左右,其可調整的結果如 4.4 節中表 4.2 所述;而另一個等效電容為 560pF 的噴墨頭,其驅動電壓約在 30V 以下,而輸出的墨滴目標體積約在 70pL 左右,在改變爬升時間的情況 下觀察驅動電壓的 Vholding 以及體積的變化程度,如表 4.4 所示。 就驅動電壓與墨滴體積的關係,在所界定的工作電壓範圍裡,與前一顆 噴墨頭性質相同呈線性正比的關係。 表 4.4 560pF 噴墨頭充電時間對應電壓、墨滴體積關係表 Tr 1.26µs 1.38µs 1.49µs 1.60µs 1.70µs 1.80µs 1.88µs. Vholding 21V 22.2V 23V 24V 24.5V 25V 25.5V. - 51 -. Volume (pL) 54.18 56.29 61.22 65.69 71.93 74.74 77.02.
(65) 驅動電壓與墨滴體積關係. 體積(pL). 100 75 墨滴體積. 50. 線性 (墨滴體積). 25 0 20. 22. 24. 26. 驅動電壓(V). 圖 4.15. 560pF 噴墨頭之驅動電壓與墨滴體積的關係. - 52 -.
數據



+7






相關文件
Teachers may consider the school’s aims and conditions or even the language environment to select the most appropriate approach according to students’ need and ability; or develop
In view of the large quantity of information that can be obtained on the Internet and from the social media, while teachers need to develop skills in selecting suitable
Wang, Solving pseudomonotone variational inequalities and pseudocon- vex optimization problems using the projection neural network, IEEE Transactions on Neural Networks 17
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
incapable to extract any quantities from QCD, nor to tackle the most interesting physics, namely, the spontaneously chiral symmetry breaking and the color confinement..
• Formation of massive primordial stars as origin of objects in the early universe. • Supernova explosions might be visible to the most
(Another example of close harmony is the four-bar unaccompanied vocal introduction to “Paperback Writer”, a somewhat later Beatles song.) Overall, Lennon’s and McCartney’s
