T-S Fuzzy Controllers for Nonlinear Interconnected
Systems With Multiple Time Delays
Feng-Hsiag Hsiao, Cheng-Wu Chen, Yew-Wen Liang, Member, IEEE, Sheng-Dong Xu, Student Member, IEEE, and
Wei-Ling Chiang
Abstract—This paper investigates the effectiveness of a passive
tuned mass damper (TMD) and fuzzy controller in reducing the structural responses subject to the external force. In general, TMD is good for linear systems. We proposed here an approach of Takagi–Sugeno (T-S) fuzzy controller to deal with the non-linear system. To overcome the effect of modeling error between nonlinear multiple time-delay systems and T-S fuzzy models, a robustness design of fuzzy control via model-based approach is proposed in this paper. A stability criterion in terms of Lyapunov’s direct method is derived to guarantee the stability of nonlinear multiple time-delay interconnected systems. Based on the decen-tralized control scheme and this criterion, a set of model-based fuzzy controllers is then synthesized via the technique of par-allel distributed compensation (PDC) to stabilize the nonlinear multiple time-delay interconnected system and the control performance is achieved at the same time. Finally, the proposed methodology is illustrated by an example of a nonlinear TMD system.
Index Terms—Fuzzy control, modeling error, multiple time
delay, Takagi–Sugeno (T-S) fuzzy model.
I. INTRODUCTION
T
HE control methods so far have been broadly classified into passive control and active control. One may dissi-pates the energy in localized elements in the passive control methods and they are already finding applications in many de-sign practice such as noise control and structural control. The ac-tive control methods, on the other hand, reduce system response or control undesired disturbance by applying counteracting con-trol forces externally or by creating reactive internal forces in systems. In recent years, there are several important works pro-posed in active control methods and their applications (see, e.g., [1]–[7] and the references therein).The well known installation of passive control in structural systems is the use of passive tuned mass dampers (TMDs), also known as dynamic absorbers, which was first proposed by Frahm in 1909 [8]. Since then, many studies have been done to investigate the control effectiveness of passive TMDs [9]–[12].
Manuscript received December 12, 2003; revised April 29, 2004 and August 14, 2004. This work was supported by the National Science Council, Taiwan, R.O.C., under Grant NSC 92-2212-E-239-004. This paper was recommended by Associate Editor C.-T. Lin.
F.-H. Hsiao is with the Department of Electronic Engineering, National University of Tainan, Tainan 700, Taiwan, R.O.C. (e-mail: [email protected]).
C.-W. Chen and W.-L. Chiang are with the Department of Civil Engineering, National Central University, Chungli 320, Taiwan, R.O.C.
Y.-W. Liang and S.-D. Xu are with the Department of Electrical and Control Engineering, National Chiao Tung University, Hsinchu 30039, Taiwan, R.O.C.
Digital Object Identifier 10.1109/TCSI.2005.852492
These articles show that the TMDs are suitable for a linear resonant system. However, nonlinearities are not negligible in some cases so that using TMD is not appropriate [13].
During the recent years, a number of research activities have been concerned with the topic of stability analysis and stabi-lization of interconnected systems, also called large-scale sys-tems or composite syssys-tems [14]. In practices, due to the infor-mation transmission between subsystems, time delays naturally exist in interconnected systems. The existence of time delays is frequently a source of instability and encountered in various engineering systems [15], [16]. Hence, the problem of stability analysis of time-delay systems has been one of the main con-cerns of researchers wishing to inspect the properties of such systems and there have been several research efforts [16]–[20] on this issue.
Recently, fuzzy control has been successfully applied to con-trol design of nonlinear systems (see [16], [20]–[31]). In most of these papers, a so-called Takagi–Sugeno (T-S) fuzzy model was employed to approximate a nonlinear plant, and then a fuzzy controller was designed to stabilize the T-S fuzzy model. In [30], Tseng and Chen proposed an H infinity decentralized fuzzy control scheme to solve the model reference tracking control problem of nonlinear interconnected systems. Based on LMI optimization techniques, a simple and systematic algorithm is developed to solve the fuzzy tracking control problem. Also, other existing techniques of decentralized control have been ad-dressed to deal with interconnected systems or time-delay prob-lems such as Shoulie et al. [32]; Souza and Li [17]–[19], [33]. All of them, however, neglect the modeling error between non-linear system and fuzzy model. Existence of modeling error may be a potential source of instability for control designs that have been based on the assumption that the fuzzy model exactly matches the plant [34]. Recently, Cao and Frank [34], Kiriakidis [35], Chen et al. [36], and Cao and Lin [37] have proposed novel approaches to overcome the influence of modeling error in the field of model-based fuzzy control for nonlinear systems.
However, a literature search indicates that the effect of mod-eling error for nonlinear multiple time-delay interconnected sys-tems has not been discussed yet. Hence, a robustness design of fuzzy control for nonlinear interconnected systems with mul-tiple time delays needs further study. Therefore, this paper may be viewed as a generalization of Tseng et al. [29], [30] to the ro-bustness design of fuzzy control via model-based approach for nonlinear multiple time-delay interconnected systems.
In summary, the purpose of this paper is to derive a stability criterion for model-based fuzzy controller to guarantee the sta-bility of nonlinear interconnected systems with multiple time 1057-7122/$20.00 © 2005 IEEE
delays. Accordingly, the T-S fuzzy model is employed to ap-proximate each nonlinear system. The control design is car-ried out based on the fuzzy model via the parallel distributed compensation (PDC) scheme. The idea is that a linear feedback control is designed for each local linear model. The resulting overall fuzzy controller, which is nonlinear in general, is a fuzzy blending of each individual linear controller.
This paper is organized as follows. The system description is presented and the T-S fuzzy model is briefly reviewed in Sec-tion II. The concept of PDC is in SecSec-tion III. In SecSec-tion IV, the control performance is described to attenuate the influence of the external disturbance. In Section V, a stability criterion is derived to guarantee the stability of nonlinear interconnected systems with multiple time delays. In Section VI, the fuzzy con-trol methodology proposed in this study is utilized to stabilize the nonlinear interconnected TMD system and a numerical ex-ample of nonlinear TMD systems is given to illustrate the re-sults.
II. SYSTEMDESCRIPTION
Consider a nonlinear multiple time-delay interconnected
system composed of subsystems , . The
th subsystem is described as follows:
(1)
where and are the nonlinear vector-valued function,
(the th time delay) are positive real
num-bers, and is the nonlinear interconnection between the th
and th subsystems; is
the state vector; is the
input vector; denotes the
unknown disturbances with a known upper bound .
A fuzzy dynamical model had been developed primarily from the pioneering work of Takagi and Sugeno [38] to represent local linear input/output relations of nonlinear systems. This dy-namical model is described by fuzzy IF-THEN rules and it is employed here to handle the control design problem of the non-linear interconnected system . The th rule of this fuzzy model for the nonlinear interconnected subsystem is proposed as the following form:
and and
(2)
where and is the number of IF-THEN rules;
, , and are constant matrices with appropriate
dimensions; are the fuzzy sets, and
are the premise variables. The final state of this fuzzy dynamic model is inferred as follows:
(3) with
(4)
in which is the grade of membership of in
. In this paper, it is assumed that
and for all
Therefore, and for all .
III. PARALLELDISTRIBUTEDCOMPENSATION
According to the decentralized control scheme, a set of model-based fuzzy controllers is synthesized via the technique of parallel distributed compensation (PDC) to stabilize the nonlinear multiple time-delay interconnected system . The concept of PDC scheme is that each control rule is distributively designed for the corresponding rule of a T-S fuzzy model. The fuzzy controller shares the same fuzzy sets with the fuzzy model in the premise parts [22]. Since each rule of the fuzzy model is described by a linear state equation, a linear control theory can be used to design the consequent parts of a fuzzy controller. The resulting overall fuzzy controller, nonlinear in general, is achieved by fuzzy blending of each individual linear controller.
Hence, the th model-based fuzzy controller can be described as follows:
and and
where is a local feedback gain matrix for . The final output of this fuzzy controller is
(6)
with
(7)
in which is the grade of membership of in
.
IV. CONTROLDESIGN VIAFUZZYCONTROL Stabilizing the closed-loop nonlinear interconnected systems and attenuating the influence of the external disturbance on the state variable [16], [30], [32], [34], [39] is the ob-jective of this paper. The influence of will worsen the per-formance of fuzzy control systems. In order to guarantee the control performance by eliminating the influence of is a significant problem in the control system. Hence, in this work, not only the stability of fuzzy control system is advised but also the control performance is satisfied as follows:
(8) where denotes the terminal time of the control, are some positive definite matrices, is a prescribed value which de-notes the effect of on , and is a positive definite weighting matrix. The physical meaning of (8) is that the effect of on must be attenuated below a desired level from the viewpoint of energy [36].
V. ROBUSTNESSDESIGN OFFUZZYCONTROL
In this section, the stability of the nonlinear interconnected system is examined under the influence of modeling error.
A. Modeling Error
Substituting (6) into (1) yields the th closed-loop nonlinear subsystem as follows:
(9) where (10) (11) (12) and
de-notes the modeling error between the th closed-loop nonlinear subsystem (9) and the closed-loop fuzzy model ((3)+(6)).
Suppose that there exist bounding matrices such that (13)
for the trajectory , and the bounding matrix can be described as follows:
(14)
where , for , . From
(13), (14), we have
(15) Namely, the modeling error is bounded by the spec-ified structured bounding matrix .
Remark 1 ([36]): The procedures for determining and are described in the following. Assuming that the possible bounds for all elements in are
where for some , and
; .
One possible description for the bounding matrix is
where for . It is noticed that can be
chosen by other forms as long as . Then, we check the validity of (13) in the simulation. If it is not satisfied, we can expand the bounds for all elements in and repeat the design procedures until (13) holds.
B. Stability in the Presence of Modeling Error
In the following, a stability criterion is proposed to guarantee the stability of the closed-loop nonlinear multiple time-delay in-terconnected system which consists of closed-loop subsys-tems described in (9). Prior to examination of stability of , a useful inequality is given below.
Lemma 1 ([33], [40]): For any matrices and with appro-priate dimensions, we have
where is a positive constant.
Theorem 1: The trajectories of closed-loop nonlinear
mul-tiple time-delay interconnected system in the absence of
dis-turbances are asymptotically stable and
the control performance can be achieved, if there exist sym-metric positive definite matrices and positive constants , , and the feedback gains s shown in (6) are chosen to satisfy
for (16)
Proof: See Appendix.
Remark 2: Equation (16) can be transformed to a linear
ma-trix inequality (LMI) via the following procedure. By
intro-ducing new variables , ,
and , (16) is rewritten as follows:
(17)
for ; . Moreover, based on Schur
complements [20], [30], [36], [41]–[43], it is easy to find that (17) is equivalent to the inequality (18) at the bottom of the next
page, for , where
and the symbol denotes the transposed elements in the sym-metric positions, shown in (19) at the bottom of the next page.
Remark 3: Let , and then (18) can be transformed into the LMI (19). After and being solved from (19), and can be adjusted in (18) to find a suitable
such that better control performance can be achieved. Therefore, based on the LMI technique as that in Hu et al. [43], Theorem 1 can be reformulated into an LMI problem and efficient interior-point algorithms are now available in Matlab toolbox to solve this problem.
VI. EXAMPLE
A. TMD System
A passive TMD mounted on a shear structure is modeled as a two-degree-of freedom structure-TMD system as shown in Fig. 1 The parameters , and represent mass, damping and stiffness in the subsystem 1; , and represent mass, damping and stiffness in the subsystem 2; and represent ex-ternal force and control input. The equation of motion with no control input can be written as [9], [44]
(20) where is natural frequency of primary structure;
is the natural frequency of TMD;
is the damping ratio of primary structure; is
Fig. 1. Two-DOF structure-TMD system.
TMD to primary structure; is the frequency of external force; frequency ratio.
Fig. 2 shows the effectiveness of a TMD system in reducing the response due to an external force with ,
, , , ,
, and initial conditions
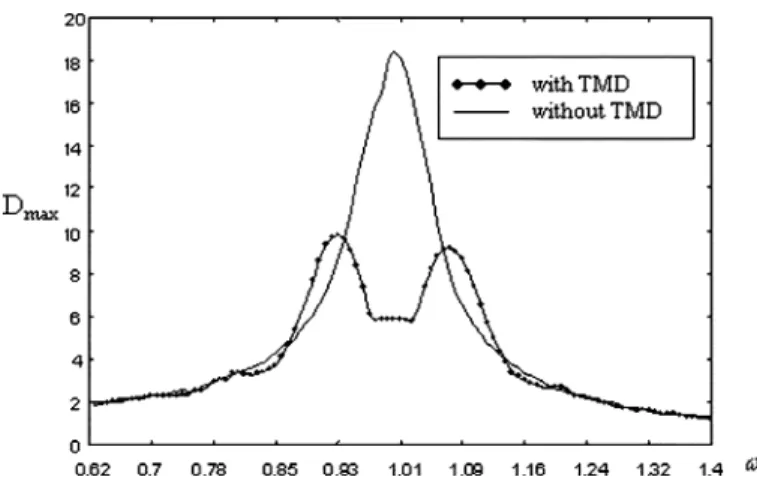
. Fig. 3 shows the dynamic magnification factor in 50 s where restoring force is a linear function. Hence, the passive TMD is appropriate when the frequency of external excitation is close to the structure. However, the restoring force of spring stiffness is nonlinear in actual systems. Moreover, TMD does
not work shown in Figs. 4–6 with ,
and initial conditions
. Therefore, a method of fuzzy control is proposed to guarantee the stability of nonlinear systems in next subsection.
In the above, a simple structural system without time delays is addressed. However, due to the information transmission be-tween subsystems, time delays naturally exist in practical non-linear interconnected systems. In the following, state-space rep-resentation is established to deal with stability problem of the
Fig. 2. Effectiveness of a TMD system.
Fig. 3. Effectiveness of a TMD system with linear stiffnessk(x).
structural system (20) and multiple time delays are considered in the meantime for real-world application.
. ..
(18)
. ..
Fig. 4. Dynamic magnification factor of a TMD system with nonlinear stiffnessk(x).
Fig. 5. Dynamic magnification factor of a TMD system with nonlinear stiffnessk(x).
Fig. 6. Dynamic magnification factor of a TMD system with nonlinear stiffnessk(x).
B. PDC Fuzzy Controllers
The objective here is to synthesize a set of T-S fuzzy con-troller to stabilize the nonlinear interconnected system which
is composed of two subsystems with multiple time delays de-scribed in (21) and (22). Furthermore, the parameters in (20) are shown as follows:
Subsystem 1: (21) Subsystem 2: (22) where , , and .
How do we synthesize two T-S fuzzy controllers to stabilize the nonlinear TMD system ?
Solution: We can solve this problem according to the
fol-lowing steps.
Step 1) Establish a T-S fuzzy model for each nonlinear in-terconnected subsystem by the concept of local lin-earization as that in [21], [36]. To minimize the de-sign effort and complexity, we try to use as few rules
as possible. Hence, the subsystems (21), (22) are ap-proximated with the following fuzzy models: 1) T-S Fuzzy Model of Subsystem 1:
where
(23) and the membership functions for Rule 1 and Rule 2 are
2) T-S Fuzzy Model of Subsystem 2:
where
(24) and membership functions for Rule 1 and Rule 2 are
when when otherwise
Step 2) In order to stabilize the nonlinear interconnected system , two model-based fuzzy controllers de-signed via the concept of PDC scheme are synthesized as follows.
1) Fuzzy controller of subsystem 1:
(25) 2) Fuzzy controller of subsystem 2:
Step 3) In accordance with Remark 1, specified structured bounding matrices are chosen as
for (27)
Step 4) In order to guarantee the control performance, the matrices s in (16) must be chosen to be positive definite. At first, based on (23)–(27) and (18), we can get the common solutions , , and
via Matlab LMI optimization toolbox with
, and .
Then, the following positive definite matrices
, , s and feedback
gains s can be obtained such that
(16) is satisfied
(28)
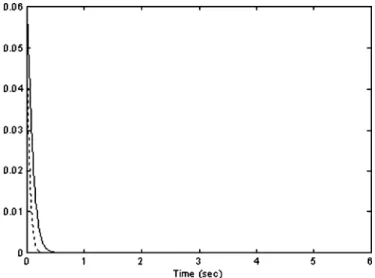
Fig. 7. Plots of kf (x (t)) 0 i = 1 h (t)h (t)(A 0 B K )x (t)k (dashed line) and k h (t)h (t)1H x (t)k (solid line).
Fig. 8. Plots of kf (x (t)) 0 h (t)h (t)(A 0 B K )x (t)k (dashed line) and k h (t)h (t)1H x (t)k (solid line).
(29)
(30)
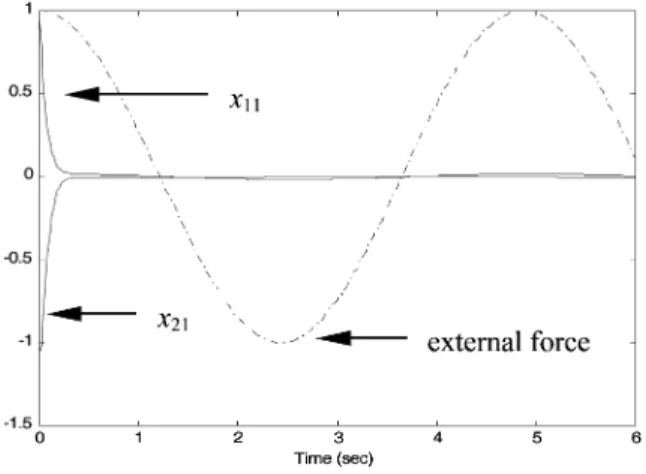
Fig. 9. State response of subsystem 1.
Fig. 10. State response of subsystem 2.
Furthermore, the assumption of
for
are satisfied from the illustration in Figs. 7 and 8 with initial
conditions, , , , and
.
Therefore, based on Theorem 1, the T-S fuzzy controllers described in (25) and (26) can stabilize the nonlinear intercon-nected TMD system . Simulation results of each closed-loop subsystem are illustrated in Figs. 9 and 10. From Figs. 9 and 10, we have that the nonlinear interconnected system is stable because the trajectories of two subsystems starting from nonzero initial states both approach close to the origin under har-monic excitation.
VII. CONCLUSION
In this paper, a stability criterion is derived for nonlinear mul-tiple time-delay interconnected systems via Lyapunov’s direct method. An example of nonlinear TMDs is given to demon-strate the validity of the proposed controller design and it shows
TMD is not suitable to reduce responses in nonlinear systems. A systematic design of fuzzy control is therefore proposed to ensure the stability of nonlinear multiple time-delay intercon-nected systems. According to the stability criterion and the de-centralized control scheme, a set of model-based fuzzy con-trollers via the technique of PDC is proposed to overcome the influence of modeling error and stabilize the nonlinear multiple time-delay interconnected TMD systems. So, the proposed control performance of fuzzy control can be applied to the robust control design of nonlinear interconnected systems with mul-tiple time delays.
APPENDIX PROOF OFTHEOREM1
Let the Lyapunov function for the closed-loop nonlinear mul-tiple time-delay interconnected system be defined as
(32)
where the weighting matrices and
. We then evaluate the time derivative of on the trajecto-ries of (9) to get
Based on Lemma 1, (33) and (15), we have
(34)
In view of and , we have
(35)
Based on (16) and (35)
(36)
Based on the concept of interconnection, the matrix ^A is equal to zero.
This demonstrates that the trajectories of the closed-loop system (9) in the absence of disturbance are asymptotically stable.
In-tegrating (36) from to yields
(37) From (32), we get
(38) and then the control performance can be achieved with a
prescribed .
ACKNOWLEDGMENT
The authors wish to express sincere gratitude to Prof. K. K. Parhi and Prof. C.-T. Lin for their help and the anonymous re-viewers for their constructive comments and helpful sugges-tions, which lead to substantial improvements of this paper.
REFERENCES
[1] J.-S. Hu and S.-H. Yu, “Application of model-matching techniques to feedforward active noise controller design,” IEEE Trans. Contr. Syst.
Technol., vol. 6, no. 1, pp. 33–42, Jan. 1998.
[2] J.-S. Hu and J.-F. Lin, “Feedforward active noise controller design in ducts without independent noise source measurements,” IEEE Trans.
Contr. Syst. Technol., vol. 8, no. 3, pp. 443–455, May 2000.
[3] D. H. Kim, J. W. Park, G.-S. Lee, and K.-I. Lee, “Active impact control system design with a hydraulic damper,” J. Sound Vibration, vol. 250, pp. 485–501, 2000.
[4] S. K. Rasouli and M. Yahyai, “Control of response of structures with passive and active tuned mass dampers,” Structural Design of Tall
Build-ings, vol. 11, pp. 1–14, 2002.
[5] S.-M. Kuo, M. Tahernezhadi, and W. Hao, “Convergence analysis of narrow-band active noise control system,” IEEE Trans. Circuits Syst. II,
Anlaog Digit. Signal Process., vol. 46, no. 2, pp. 220–223, Feb. 1999.
[6] W.-S. Gan and S.-M. Kuo, “An integrated audio and active noise control headsets,” IEEE Trans. Consum. Electron., vol. 48, pp. 242–247, 2002. [7] S.-M. Kuo, X. Kong, and W.-S. Gan, “Applications of adaptive feedback active noise control system,” IEEE Trans. Contr. Syst. Technol., vol. 11, no. 2, pp. 216–220, Mar. 2003.
[8] H. Frahm, “Device for Damping Vibrations of Bodies,” U.S. Patent 989-958.
[9] C.-C. Lin, C.-M. Hu, J.-F. Wang, and R.-Y. Hu, “Vibration control ef-fectiveness of passive tuned mass dampers,” J. Chinese Inst. Eng., vol. 17, pp. 367–376, 1994.
[10] J. R. Sladek and R. E. Klingner, “Effect of tuned-mass dampers on seismic response,” J. Structural Eng., vol. 109, pp. 2004–2009, 1983. [11] A. M. Kaynia, D. Veneziano, and J. M. Biggs, “Seismic effectiveness of
tuned mass dampers,” J. Structural Division, vol. 107, pp. 1465–1484, 1981.
[12] R. J. McNamara, “Tuned mass dampers for buildings,” J. Structural
Di-vision, vol. 103, pp. 1785–1798, 1977.
[13] H. K. Khalil, Nonlinear Systems. London, U.K.: Macmilllan, 1992. [14] C.-H. Lee, T.-H. Li, and F.-C. Kung, “On the robust stability for
con-tinuous large-scale uncertain systems with time delays in interconnec-tions,” J. Chinese Inst. Eng., vol. 17, pp. 577–584, 1994.
[15] M. Ikea and T. Ashida, “Stabilization of linear systems with time-varying delay,” IEEE Trans. Autom. Contr., vol. 24, no. 2, pp. 369–370, Apr. 1979.
[16] K. R. Lee, J. H. Kim, E. T. Jeung, and H. B. Park, “Output feedback ro-bustH control of uncertain fuzzy dynamic systems with time-varying delay,” IEEE Trans. Fuzzy Syst., vol. 8, no. 6, pp. 657–664, Dec. 2000. [17] X. Li and C. E. de. Souza, “LMI approach to delay-dependent robust
stability and stabilization of uncertain linear delay systems,” in Proc.
IEEE Conf. on Decision Control, vol. 4, 1995, pp. 3614–3619.
[18] C. E. de. Souza and X. Li, “Delay-dependent robust H infinity con-trol of uncertain linear state-delayed systems,” Automatica, vol. 35, pp. 1313–1321, 1999.
[19] , “LMI approach to decentralized stabilization of interconnected time-delay systems,” in Proc. IEEE Conf. Decision Contr., vol. 5, 1999, pp. 4700–4705.
[20] Y.-Y. Cao and P. M. Frank, “Analysis and synthesis of nonlinear time-delay systems via fuzzy control approach,” IEEE Trans. Fuzzy Syst., vol. 8, no. 2, pp. 200–211, Apr. 2000.
[21] H. O. Wang, K. Tanaka, and M. F. Griffin, “An approach to fuzzy control of nonlinear systems: stability and design issues,” IEEE Trans. Fuzzy
Syst., vol. 4, no. 1, pp. 14–23, Feb. 1996.
[22] K. Tanaka, T. Ikeda, and H. O. Wang, “Robust stabilization of a class of uncertain nonlinear systems via fuzzy control: quadratic stabilizability, H control theory, and linear matrix inequalities,” IEEE Trans. Fuzzy
Syst., vol. 4, no. 1, pp. 1–13, Feb. 1996.
[23] G. Feng, S.-G. Cao, N. W. Rees, and C. K. Chak, “Design of fuzzy con-trol systems with guaranteed stability,” Fuzzy Sets and Syst., vol. 85, pp. 1–10, 1997.
[24] X.-J. Ma, Z.-O. Sun, and Y.-Y. He, “Analysis and design of fuzzy con-troller and fuzzy observer,” IEEE Trans. Fuzzy Syst., vol. 6, no. 1, pp. 41–51, Feb. 1998.
[25] W.-J. Wang and H.-R. Lin, “Fuzzy control design for the trajectory tracking on uncertain nonlinear systems,” IEEE Trans. Fuzzy Syst., vol. 7, no. 1, pp. 53–62, Feb. 1999.
[26] S.-J. Wu and C.-T. Lin, “Optimal fuzzy controller design: local concept approach,” IEEE Trans. Fuzzy Syst., vol. 8, no. 2, pp. 171–185, Apr. 2000.
[27] , “Optimal fuzzy controller design in continuous fuzzy system: global concept approach,” IEEE Trans. Fuzzy Syst., vol. 8, no. 6, pp. 713–729, Dec. 2000.
[28] C.-S. Tseng, B.-S. Chen, and H.-J. Uang, “On maximum stability margin design of nonlinear uncertain systems: fuzzy control approach,” Asian
J. Contr., vol. 3, pp. 190–203, 2001.
[29] , “Fuzzy tracking control design for nonlinear dynamic systems via T-S fuzzy model,” IEEE Trans. Fuzzy Syst., vol. 9, pp. 381–392, 2001. [30] C.-S. Tseng and B.-S. Chen, “H decentralized fuzzy model reference
tracking control design for nonlinear interconnected systems,” IEEE
Trans. Fuzzy Syst., vol. 9, no. 6, pp. 795–809, Dec. 2001.
[31] S.-J. Wund and C.-T. Lin, “Discrete-time optimal fuzzy controller de-sign: global concept approach,” IEEE Trans. Fuzzy Syst., vol. 10, no. 1, pp. 21–38, Feb. 2002.
[32] X. Shoulie, X. Lihua, and W. Changyun, “DecentralizedH output feedback control of interconnected time-delay systems,” in Proc. Amer.
Contr. Conf., 2000, pp. 824–828.
[33] X. Li and C. E. de. Souza, “Criteria for robust stability and stabilization of uncertain linear systems with state delay,” Automatica, vol. 33, pp. 1657–1662, 1997.
[34] Y.-Y. Cao and P. M. Frank, “RobustH disturbance attenuation for a class of uncertain discrete-time fuzzy systems,” IEEE Trans. Fuzzy Syst., vol. 8, no. 4, pp. 406–415, Aug. 2000.
[35] K. Kiriakidis, “Fuzzy model-based control of complex plants,” IEEE
Trans. Fuzzy Syst., vol. 6, no. 4, pp. 517–529, Nov. 1998.
[36] B.-S. Chen, C.-S. Tseng, and H.-J. Uang, “Robustness design of non-linear dynamic systems via fuzzy non-linear control,” IEEE Trans. Fuzzy
Syst., vol. 7, no. 5, pp. 571–585, Oct. 1999.
[37] Y.-Y. Cao and Z. Lin, “Robust stability analysis and fuzzy-scheduling control for nonlinear systems subject to actuator saturation,” IEEE
Trans. Fuzzy Syst., vol. 11, no. 1, pp. 57–67, Feb. 2003.
[38] T. Takagi and M. Sugeno, “Fuzzy identification of systems and its appli-cations to modeling and control,” IEEE Trans. Syst., Man, Cybern., vol. 15, no. 1, pp. 116–132, Jan. 1985.
[39] W. Lin and C. I. Byrnes, “H -control of discrete-time nonlinear sys-tems,” IEEE Trans. Autom. Contr., vol. 41, no. 4, pp. 494–510, Apr. 1996.
[40] K. Zhou and P. P. Khargonedkar, “Robust stabilization of linear systems with norm-bounded time-varying uncertainty,” Syst. Contr. Lett., vol. 10, pp. 17–20, 1988.
[41] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix
Inequalities in System and Control Theory. Philadelphia, PA: SIAM, 1994.
[42] Y.-Y. Cao, Z. Lin, and B. M. Chen, “An output feedbackH controller design for linear systems subject to sensor nonlinearities,” IEEE Trans.
Circuits Syst. I, vol. 50, no. 7, pp. 914–921, Jul. 2003.
[43] L.-S. Hu, B. Huang, and Y.-Y. Cao, “Robust digital model predictive control for linear uncertain systems with saturations,” IEEE Trans.
Autom. Contr., vol. 49, no. 5, pp. 792–796, May 2004.
[44] R. W. Clough and J. Penzien, Dynamics of Structures. New York: Mc-Graw-Hill, 1993.
Feng-Hsiag Hsiao was born in Tainan, Taiwan,
R.O.C., in 1960. He received the B.S. degree in electronic engineering from Chung Yuan Christian University, Chungli, in 1983, the M.S. degree in electrical engineering from Tatung University, Taipei, in 1985, and the Ph.D. degree in electrical engineering from National Sun Yat-Sen University, Kaohsiung, in 1991.
Currently, he is a Professor and Head of Depart-ment of Electronic Engineering, National University of Tainan, Tainan, Taiwan, R.O.C. His research inter-ests are in the area of fuzzy control, neural networks, large-scale control, and the dither problem.
Cheng-Wu Chen received the B.S. degree in harbor and river engineering from
National Taiwan Ocean University, Keelung, Taiwan, R.O.C., in 1999, and the Ph.D. degree in civil engineering from National Central University, Chungli, Taiwan, R.O.C., in 2004.
His research interests are in the area of structural engineering and fuzzy con-trol.
Yew-Wen Liang (M’02) was born in Taiwan,
R.O.C., in 1960. He received the B.S. degree in mathematics from Tung Hai University, Taichung, Taiwan, R.O.C., in 1982, and the M.S. degree in ap-plied mathematics and the Ph.D. degree in electrical and control engineering from National Chiao Tung University, Hshinchu, Taiwan, R.O.C., in 1984 and 1998, respectively.
Since August 1987, he has been with the National Chiao Tung University, where he is currently an Associate Professor of Electrical and Control En-gineering. His research interests include nonlinear control systems, reliable control, and fault detection and diagnosis issues.
Sheng-Dong Xu (S’02) was born in Miaoli, Taiwan,
R.O.C., in 1970. He received the B.S. degree in elec-trical engineering from Yuan Ze Institute of Tech-nology, Chungli, Taiwan, R.O.C., in 1994, and the M.S. degree in biomedical engineering from National Cheng Kung University, Tainan, Taiwan, R.O.C., in 2000.
He is currently working toward the Ph.D. degree with the Department of Electrical and Control En-gineering, National Chiao Tung University, Hsinchu, Taiwan, R.O.C. His research interests include control theory, signal processing, and fuzzy neural systems.
Wei-Ling Chiang received the B.S. degree from the Department of Civil
Engi-neering, National Taiwan University, Taiwan, R.O.C., and the M.S. and Ph.D. degrees from Stanford University, Stanford, CA.
He is currently a Professor with the Department of Civil Engineering, Na-tional Central University, Taiwan, R.O.C. His research interests include uncer-tainty management that involves applications of fuzzy theory and probabilistic method to civil engineering problems, applying newly developed methodology such as neural networks, catastrophe theory and evidence theory to various civil-engineering-related problems, risk management, optimal control, and bridge management.