國
立
交
通
大
學
生醫工程研究所
碩
士
論
文
使 用 少 量 投 影 資 訊 的 3 D 血 管 重 建 技 術
The Technique of 3D Blood Vessel Reconstruction with Few
Projection Data
研 究 生:陳寰宇
指導教授:荊宇泰 教授
使用少量投影資訊的 3D 血管重建技術
The Technique of 3D Blood Vessel Reconstruction with Few
Projection Data
研 究 生:陳寰宇
Student:Huan-Yu Chen
指導教授:荊宇泰 Advisor:Yu-Tai Ching
國 立 交 通 大 學
生醫工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Biomedical Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer and Information Science Sep 2011
Hsinchu, Taiwan, Republic of China
i
使用少量投影資訊的 3D 血管重建技術
學生:
陳寰宇指導教授
:荊宇泰國立交通大學生醫工程研究所
摘
要
電腦斷層掃描技術在現今的醫療領域中是非常重要的技術,透過非
侵入式的觀察方法,我們得以在不破壞觀測物的情況下,記錄下物體內完
整的資訊。科技日新月異,觀測的技術也日益精進,如今我們已經可以觀
察到奈米等級大小的世界。不幸的,因為觀測物的微小,在觀測的過程中
暴露在 X 光的照射下,在拍攝的過程中,物體不斷的衰退;如此情況造成
難以觀察物體原始型態。因此在觀測微小物體時,勢必的要減少觀測次數。
由於過往的重建技術建立在足夠多的投影資訊上,因此本論文主要
介紹在少量投影資訊下,如何有效的重建物體影像。在內文中介紹了包括
本文提出的方法在內的三種重建技術;FBP、ART 以及特徵重建法。希望
透過此項技術的發展,得以在醫學影像研究上有更進一步的突破。
ii
The Technique of 3D Blood Vessel Reconstruction with Few
Projection Data
Student: Huan-Yu Chen
Advisor: Yu-Tai Ching
Institute of Biomedical Engineering
National Chiao Tung University
ABSTRACT
The rule of Computer Tomography on medical is very impotent. We
can use non-invasive procedures to observe the inside of body without injuring.
With the development of scientific and technological progress, we can observe
the world of nanometer. Unfortunately, the power of x-ray is too strong for
microstructure, which will damage the cell. So we have to reduce the time of
observation.
We have to get a lot of projection, otherwise we can’t do well on
reconstruction. So we show the technique of reconstruction with few projection .
There are three techniques in this article. We hope the technique will be
iii
誌謝
首先要感謝我的指導老師,荊宇泰教授。沒有老師的引導,就不會有這篇論文 的出現,我也不會學習到研究的方法,以及學術研究該有的精神。此外也要感謝秉璋 學長、昌杰學長,謝謝你們總是在我有問題的時候,不保留的把知識傳授給我們,也 在我無助的時候提供經驗,讓我在研究所生活中不會迷失了方向。宗澤、阿 KEN、正宇、 千千、大威、CC,因為有你們,實驗室總是充滿著歡樂的氣氛,我永遠都不會忘記一 起奮戰到天明的時光。謝謝小由、心宇,因為有你們的幫助,修課的日子才不會孤軍 奮戰。謝謝小莉,妳就像大姊一樣的照顧我們,有個姐姐真好。還有我的好朋友葉謹 慰,因為你,我才真的感受到甚麼是有福同享有難同當,這兩年發生很多事情,謝謝 你總是能跟我分享快樂,分擔憂愁,我會叫狗狗會好好珍惜妳的。謝謝欣裕、阿淳、 輝哥、琪琪,謝謝妳們的活力以及陪伴,相信你們接下來的研究一定可以很順利的。 謝謝正咩光光、帥哥英智陪我認識了台北的這個新城市,更要感謝如如太太,謝謝妳 在我生命中出現,有妳的陪伴,讓這些日子的時光不孤單,充滿著努力向前的力量, 我愛妳。最後要感謝我的父母、家人,謝謝你們一直以來的支持與陪伴,讓我漸漸成 長茁壯,謝謝你們。謝謝身邊所有的人,願你們時時都能擁有強壯開朗的心。iv
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... v 第一章 緒論 ... 1 1.1 簡介 ... 1 1.2 論文架構 ... 1 第二章 背景與理論基礎 ... 2 2.1 前言 ... 2 2.2 影像重建技術理論基礎 ... 32.3 濾波反投影法(Filter Back Projection, FBP) ... 3
2.3.1 Fourier Slice Theorem ... 5
2.3.2 濾波反投影法理論 ... 7
2.4 數值重建法(Algebra Reconstruction Techniques, ART) ... 9
2.5 投影特徵重建法 ... 11 2.5.1 找尋特徵資料 ... 11 2.5.2 影像重建 ... 15 第三章 雜訊的去除 ... 18 第四章 實驗與結果 ... 22 第五章 結果討論及未來展望 ... 28
v
圖目錄
圖 2-1 投影資料來源 ... 2
圖 2-2 原始影像及其 sinogram ... 3
圖 2-3 投影的數學模型 ... 4
圖 2-4 Fourier Slice Theorem 示意圖 ... 5
圖 2-5 重建影像在極座標系統上的二維傅立葉轉換 ... 7 圖 2-6 ART 的數學幾何模型 ... 9 圖 2-7 投影資料 ... 11 圖 2-8 血管橫截面的灰階分布圖 ... 12 圖 2-9 mask 範例 ... 13 圖 2-10 match filter 的結果 ... 13 圖 2-11 水帄方向的 Intensity 分佈情形 ... 14 圖 2-12 取 peak 後的結果 ... 15 圖 2-13 投影特徵重建法的原理 ... 15 圖 2-14 現實中重建的情形 ... 16 圖 2-15 相交區域示意圖 ... 16 圖 2-16 投影點與投影點相交區域 ... 17 圖 2-17 與各投影點的交點 ... 17 圖 3-1 有三個 connected component 的圖 ... 18 圖 3-2 3D 座標中的一個 connected component ... 19 圖 3-3 尋找 connected component 的過程 ... 19
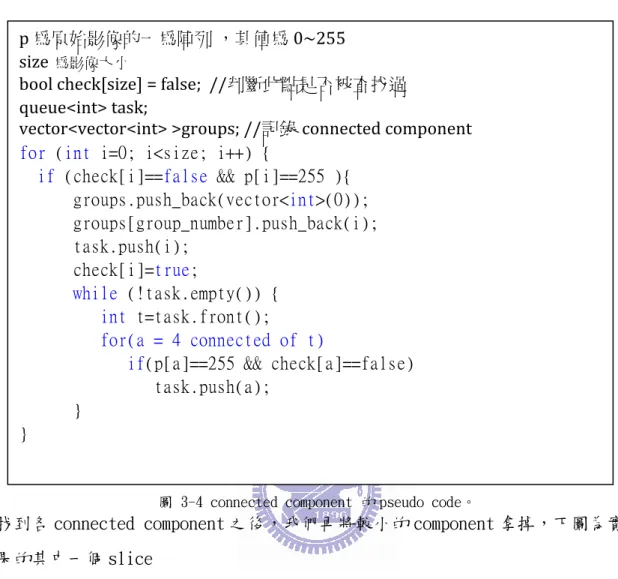
圖 3-4 connected component 的 pseudo code ... 20
圖 3-5 去除大小小於 10 的例子 ... 21 圖 4-1 原始影像的 Projection ... 22 圖 4-2 ART 重建結果 ... 23 圖 4-3 FBP 重建結果 ... 23 圖 4-4 FBP 重建結果 ... 24 圖 4-5 FBP 重建結果 ... 24 圖 4-6 FBP 重建結果 ... 25 圖 4-7 特徵重建法使用 FBP 重建結果 ... 25 圖 4-8 影像辨識結果 ... 26 圖 4-9 利用投影特徵的重建結果 ... 26 圖 4-10 利用投影特徵的重建結果 ... 27 圖 4-11 利用投影特徵的重建結果 ... 27 L( j )
1 第一章
緒論
1.1 簡介
電腦斷層掃描(Computerized Tomography)技術,簡稱 CT。此項技術的發明, 使得醫護人員不僅僅是透過生物體的外觀、病理表徵去診斷疾病,更近一步的使用 非侵入式的方法透視人體內部的情況,協助身體狀態的評估。 近年來,科技日新月異,我們得以看見更細微的世界,透過短波長的光波,奈 米的世界印入眼簾。在這個尺度微小的領域中,我們不僅發現了新世界的奧妙,卻 也遇見了新的問題。 就同步輻射中心的取像上,由於觀察的生物體極為細小,使得強大的 X 光帶來 的破壞明顯可見。所以為了保持觀測物的原始狀態,我們希望能減少取像的次數, 降低能量對觀測物的傷害,進而得到更正確的實驗結果。 本論文嘗詴解決資訊缺乏下的 CT 影像重建,包括傳統的濾波反投影(Filter Back Projection ,簡稱 FBP)[1]、ART 以及本論文所提出的方法,並展示各方法 所得到的重建結果。1.2 論文架構
本論文第一章節為簡介。第二章分成三個小節,前面兩小節會先介紹兩個在實 作上常被使用的方法;濾波反投影法、代數重建法。第三小節為本論文提出的方法。 在重建的結果中,無論是用上述的何種方法,都會產生雜訊,所以在第三章提出去 雜訊的方法。第四章則為本論文提及的三個重建方法的實驗結果。2 第二章
背景與理論基礎
2.1 前言
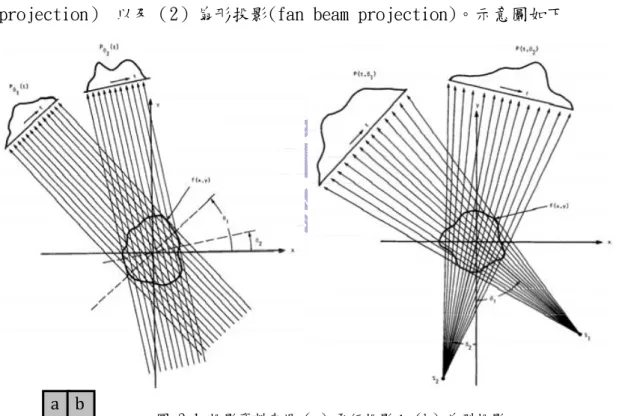
電腦斷層掃描利用 x-ray、超音波或是放射線同位素等,對觀測物體進行不同角 度的照射,由於射線在穿透物體的過程中,能量會因為物體的阻擋而造成不同程度的 衰減,因此在照射的另一端,以一連串的感測器進行射線衰減的偵測,我們便可以使 用這些偵測獲得的資料進行物體的重建,進而得到物體的截面資訊。 在電腦斷層掃描技術中,收集資料的方式有兩種,(1)帄行投影(parallel projection) 以及(2)扇形投影(fan beam projection)。示意圖如下圖 2-1 投影資料來源(a)帄行投影;(b)扇型投影。
(資料來源: A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
Imaging”, IEEE Press, 1988.)
本篇論文所介紹的演算法以及投影特徵重建法,都是以帄行投影為基礎而衍生的重建 方法。
3
2.2 影像重建技術理論基礎
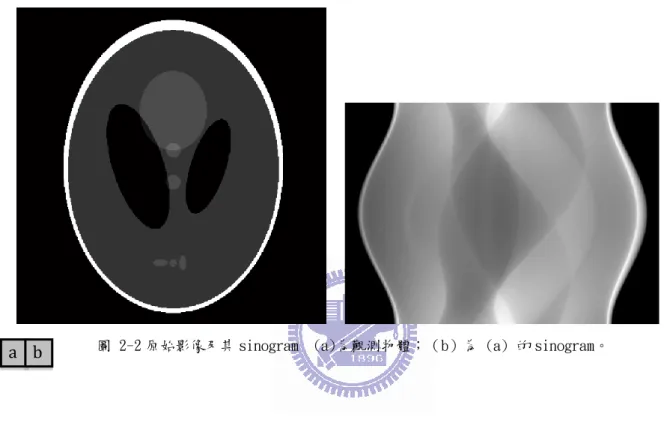
在 2.1 節中提到,透過感測器,可以得到不同角度的射線衰減值;我們將這些 資訊(projection data)依照角度 0 ~ 排列,所得到的資料稱為 Sinogram。電腦斷 層掃描技術的影像重建就是利用 Sinogram 作為輸入資料,重建出物體的截面資料。
在圖 2.2 (b) 中,每一列的資料即為 角度下,感測器所接收的射線衰退值。
圖 2-2 原始影像及其 sinogram (a)為觀測物體;(b)為 (a) 的 sinogram。
2.3 濾波反投影法(Filter Back Projection, FBP)
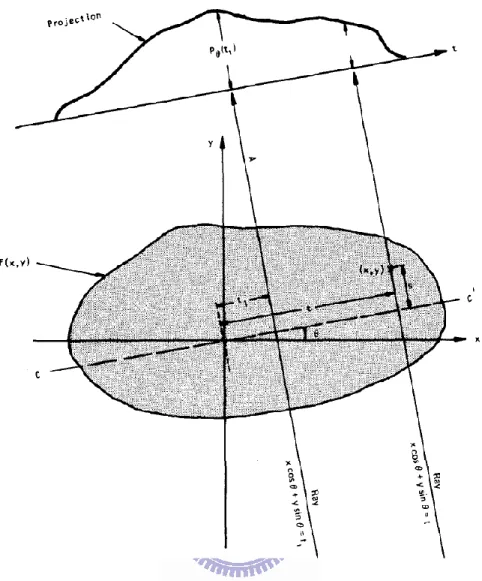
在這小節,我們將介紹投影( Projection)、Fourier Slice Theroem 以及 FBP。首先先從建立投影的數學模型開始,如圖 2-3 所示
4
圖 2-3 投影的數學模型。
(資料來源: A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
Imaging”, IEEE Press, 1988.)
為 角度下的投影資料; 表示原始影像中,位於座標 ( x , y )的 Intensity。利用此座標系統,定義出 式(2)代表 角度下的第 t 條射線;透過式(1)的替代得到 projection data 為 ( ) ∫ ( ) ( ) 利用 delta fuctione ;式(4),我們可以得到在 角度下第 t 條射線的衰弱係數 總和;如式(3) p( t ) f ( x , y ) x cos y sin t . (1) (2)
5
2.3.1
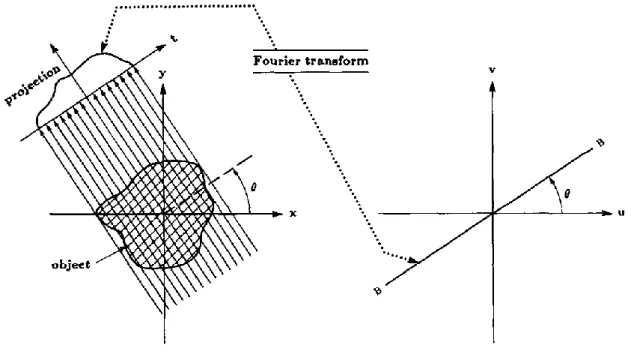
Fourier Slice Theorem
這個定理是在說明 經過一維傅立葉轉換後會是重建影像經過二維傅立葉轉 換後,通過其中心由水帄旋轉 的一條射線。如圖 2-4 所示:
為了詳細說明此定理,我們先介紹二維的傅立葉轉換,其方程式如下
對於 角度下的投影 ,其一維的傅立葉轉換如下
接著我們透過簡單的例子來了解 Fourier Slice Theorem ;取出 (重建影像 二維傅立葉轉換後的資訊);也就是通過中心點的垂直線,可以用下列式子表示
p( t ) f ( x , y )( x cos y sin t ) dxdy
( n ) 0 1 if n 0 if n = 0. p( t ) F ( u, v ) f ( x , y )e j 2( uxvy )dxdy .
p( t ) S( w ) P( t )ej 2wtdt .
F ( u, 0 ) (3) (4) (5) (6)圖 2-4 Fourier Slice Theorem 示意圖。
(資料來源: A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
6 (8) 式(7)可改寫如下 ( ) ∫ [ ∫ ( ) ] 在零度角的投影資料也可以改寫成 把上式帶入式(8)得到 上式等號的右邊又等於 的一維傅立葉轉換,因此我們找到下列的對應關係 ( ) ( )
上述的介紹很簡單易懂,但更確切的 Fourier Slice Theorem 數學架構是建立在 座標系統上,而上述的例子沒有把旋轉的部份帶入數學式中; 座標系統是原 始座標系統 旋轉後的對應座標。對應如下 [ ] [ ] [ ] 在 座標系統下,其投影資料可以表示成 接著式(6)也可以改寫成 再把式(13)帶入上式 ( ) ∫ [ ∫ ( ) ] 這個結果可以藉由式(15)轉換到 座標系統,其結果如下 當( )上式等號的右手邊即為二維的傅立葉轉換,所以 F ( u, 0 ) f ( x , y )ej 2uxdxdy
P0( x ) f ( x , y ) dy
F ( u, 0 ) P0( x )ej 2uxdx .
p0 ( t , s) ( t , s) ( x , y ) ( t , s) p( t ) f ( t, s) ds
S( w ) P( t )ej 2wtdt .
( x , y ) S( w ) f ( x , y )
ej 2w ( x cosy sin)dxdy .
u w cos , v w sin S( w ) F ( u, v ) F ( w cos , w sin ). (7) (9) (10) (11) (12) (13) (14) (15) (16) (17) (7)7 由此我們證明了 Fourier Slice Theorem。
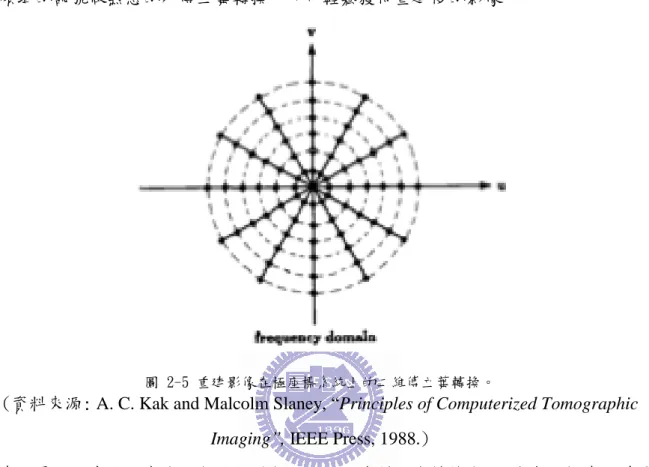
理論上我們只要收集到無限角度的投影資料;透過此定理,可以完成在極座標 系統的頻域資料(圖 2-5)[1]; 再將這些訊號轉換到 uv 帄面上 ,接著我們只要對 此頻域的訊號做熟悉的反傅立葉轉換,即可輕鬆獲得重建後的影像。
圖 2-5 重建影像在極座標系統上的二維傅立葉轉換。
(資料來源: A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
Imaging”, IEEE Press, 1988.)
不幸的是,現實生活中我們無法取得無限的投影資料,在轉換成 uv 直角座標系統時需 要做內差,而在越高頻的部份,訊號越稀疏;內差的誤差就會越大 ,因此會損失很多 在高頻資料 ;造成重建影像的不完整。為了改善這樣的情況,在背投影之前先做濾波 的動作,這也是 FBP 的精神所在。
2.3.2 濾波反投影法理論
FBP 主要分為兩部分:濾波以及反投影。我們可以很容易的從反傅立葉轉換的過 程中看見這樣的現象。以下是反傅立葉轉換的公式透過 Fourier Slice Theorem 得到的頻譜是建立在 極座標系統上,而我們將反 傅立葉轉換從直角座標系統轉換到極座標系統,代換如下 f ( x , y ) F ( u, v )ej 2( uxvy )dudv .
( w ,) (18)8 微分後如下 經由代換將反傅立葉轉換改寫 上式對 的積分可以分為 0 ~ 180 以及 180 ~ 360,如下 根據下列特性 可以改寫如下 d dw w e w F y x f( , ) ( , ) j wt 0 0 2
如果我們將 用 做代換,可以得到下式 w e w dw d S y x f ( , ) ( ) j wt 0 0 2
經過整理之後式(26)如下 其中 是 角度下投影資料的一維傅立葉轉換,式(28)表示 先做濾波運算, 其 mask 為 ,之後再做反傅立葉轉換,獲得實域的投影資料。因為 是濾波後 的投影資料,式(27)等號右手邊是在各個角度的投影資料中找到通過 射線的 u w cos v w sin du dv w dw d f ( x , y ) F ( w ,)ej 2w ( x cosy sin)w dw d. 0
0 2
f ( x , y ) F ( w ,)ej 2w ( x cosy sin)w dw d 0
0
F ( w , 180 o )ej 2w [ x cos(180o)y sin(180o)]w dw d. 0
2
F ( w , 180 o ) F (w ,) f ( x , y ) t x cos y sin . F ( w ,) S( w ) f ( x , y ) Q( x cos y sin ) d. 0
Q( t ) S( w ) w ej 2wt dw .
S( w ) S( w ) w Q( t ) f ( x , y ) (19) (20) (23) (24) (25) (26) (27) (28) (21) (22)9
(29)
衰減係數總和,累加到 ;簡單的說就是將剛得到新的投影資料進行反投影,因
此得到最後重建的影像資訊。
2.4 數值重建法(Algebra Reconstruction Techniques, ART)
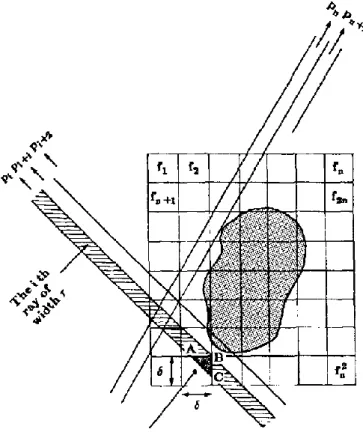
ART 主要是透過疊代的方式得到重建後的截面影像資訊,比起傳統的 FBP 需花費 更多時間,但在投影角度不足的情況下,ART 卻比 FBP 可以得到更好的結果。圖 2-6 為 ART 的數學幾何模型
圖 2-6 ART 的數學幾何模型。
(資料來源: A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
Imaging”, IEEE Press, 1988.)
表示輸出影像中第 i 個 Intersity,總數為 N; ,表示第 i 條射線通過物體,衰減後的總值,全部的射線有 M 條; , 表示 對 的貢獻值,相當於一權重值。由此模型我們可以得到 ∑ f ( x , y )
10 這是一個常見的多項式求解,一般可以透過計算 的反矩陣得到 { } 的解。 但由於矩陣 w 的大小在影像重建的例子中都是非常巨大的,其反矩陣的計算有時是不 切實際的。而且在本論文討論的基礎上 M < N,即使矩陣 W 大小很小,也是無法得到其 反矩陣,因此我們經由式(30)的疊代方式求解 其中 pi 為對第 i 條射線的觀測值。qi 則為第 i – 1 次疊代中的第 i 條射線的 Re-projection data;可以視為當下的重建影像估計值。式(30)中分母部分,為 f( x , y ) 對第 i 條射線有貢獻的權重總和,在部分疊代演算法中,若 f 對這條射 線有貢獻,w 則為 1,否則為 0 。 在本論文實驗的部份,使用的是由Emil Y. Sidky…等人提出的方法。 fj( i ) fj( i1 ) pi qi wik2 k1 N
wij qi fk( i1 )wik. k1 N
(31) (30)11
2.5 投影特徵重建法
過去的影像重建多半是對投影資料做去雜訊的動作,然後再在重建的過程中,找尋 需要的資料。而在本論文中,嘗詴先在投影資料中找出特徵資訊,再利用這些特徵重 建物體的幾何資訊,我們使用投影特徵重建法來稱之。此方法過程可以分成兩部分; 尋找特徵資訊以及重建。 尋找特徵資訊的目的是在投影資料中找到想要重建的部份;以本文為例,我們 想要重建圖 2-7 中的血管。 圖 2-7 投影資料。2.5.1 找尋特徵資料
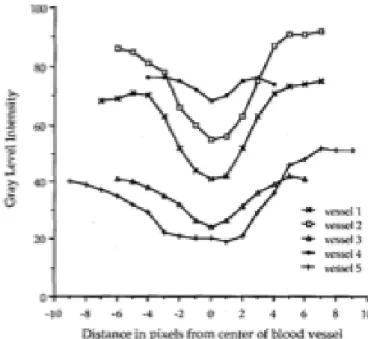
不同的影像會有著不一樣的性質,根據不同的影像可以選擇最適合的演算法對 欲觀察物加以辨識。本論文用 Match Filter 來找尋血管的部份。Match Filter 很適合用在血管的辨識,在 SUBHASIS CHAUDHURI 的論文 [3]中提到:『血管顏色通常較背景來的深,而且其橫截面的 Intensity 符合 Guassian 分布』如圖 2-8
12
圖 2-8 血管橫截面的灰階分布圖。
(資料來源:SUBHASIS CHAUDHURI, SHANKAR CHATTERJEE, NORMAN KATZ. MARK NELSON, AND MICHAEL GOLDBAUM. “Detection of Blood Vessels in Retinal
Images Using Two-Dimensional Matched Filters”, IEEE TRANSACTIONS ON MEDICAL
IMAGE 1989)
因此我們定義出血管的數學模型 d 為影像座標(x,y)到血
管中心的垂直距離; 決定這個血管的寬度。根據上述的理由,我們定義二維 match filter 的 convolution mask
L 為自定的 mask 高度;另外,由於 Gaussian Function 中定義 x 和 y 介於正負無限 大,但高斯函式絕大部分的值都落在距離中心 3 內,超過這個範圍的高斯函數值會 趨近於零;所以在定義的 filter 中,將 convolution mask 縮減到 3 的寬度即可。
上述的討論基礎在於血管的走向是垂直的,為了偵測不同走向的血管,我們會 把上述的 mask 旋轉後再做 convolution。 圖 2-9 為其 mask 的一個例子;
圖 2-10 為 match filter 的一個結果 f ( x , y ) A {1k exp( d 2 22)}. k ( x , y ) exp( x 2 22) for y L 2 . (32)
13
圖 2-9 mask 範例。 當 =2, L=9 時的 mask(a)辨識走向為 血管的 mask。
(資料來源:SUBHASIS CHAUDHURI, SHANKAR CHATTERJEE, NORMAN KATZ. MARK NELSON, AND MICHAEL GOLDBAUM. “Detection of Blood Vessels in Retinal
Images Using Two-Dimensional Matched Filters”, IEEE TRANSACTIONS ON MEDICAL
IMAGE 1989)
圖 2-10 match filter 的結果‧(a)原始影像;(b) match filter 處理後的影像。
a b
14
在本論文嘗詴的重建過程中,我們以血管的中心點當作重建的資料,因此對 match filter 的結果取其中心點;因為血管符合 guassian distribution,其中心點剛好是 intensity 最大的部分,所以我們簡單的對 XY 軸取區域最大值即可找到血管中心,如 圖 2-11 箭頭處所示。但並非所有的區域極大值就是我們要辨別的資訊,其中還參雜了 許多的雜訊,所以我們必頇在取出的極大值中,除去 Intensity 較小的部分,如此便 完成了尋找特徵資訊的工作。 圖 2-11 (b)為(a)紅線所示,水帄方向的 Intensity 分佈情形。 a b
15 圖 2-12 取 peak 後的結果。
2.5.2 影像重建
在重建的部分中,我們使用先前介紹的方法對找到的特徵影像進行重建,結果 會在第四章展示。另外我們也常詴著使用不一樣的方法去進行重建,其方法主要原理 先以圖 2-11 解釋其目的 圖 2-13 投影特徵重建法的原理。16 重建的目標物會在各投影上出現,因此若將各投影資料上的資訊做反投影時,必定會 交會於一點。所以我們利用解多元一次方程式的方法,求出相交這點的座標。 不幸的,由於我們所擁有的投影資料是離散空間,再加上實驗時在拍照過程中 無法避免的輕微的震動;或者在圖形辨識的過程中,無法準確的標示出目標物,這些 因素都會導致求解的結果無法得到唯一解(圖 2-12 顯示無法準確求出唯一交點的情 形)。 圖 2-14 現實中重建的情形。 因此在求解的過程,我們加入寬度,讓求解所得的結果為一區域,在取其最大 相交區域中心。如圖 2-13 圖 2-15 相交區域示意圖。
17 令 為角度 下的第 t 條射線投影資料;當 t 為欲重建的目標物時 p(t)=1; 否則為 0 ;當 等於 1 的時候 ,求得垂直 並通過 的直線方程式;我們以 表示由 所求得的直線方程式。接著計算出與 之間長度為 s 的帄行線, 所以獲得於 左右兩邊的帄行線段;以 表示。 圖 2-16 投影點與投影點相交區域。 之後對 與 求解, 且 ;如圖 2-14 所式, 會在 上得到兩個解,較靠近左邊的我們稱為進入點,右方的稱之為離開點,而對不 同的 與 ( ) 且 求解後; 我們會在 上得到一連串 的進入點及離開點; 如圖 2-15。 圖 2-17 與各投影點的交點。 接著我們要找出交集夠多的部份,方法如下;在 線上由左而右,若碰到進入點, 計數加一;反之,若碰到離開點則減一,以此類推;若當計數高於我們預設值時,則 計算其中心;求出上圖中點 a 與點 b 的中心點,圖中以叉叉標示 ;此標示的位置就 是目標物經過重建演算法後所得到的幾何位置。 如此在 上反覆的進行以上步驟,我們就可以重建出完整的影像。 p( t ) p( t ) p( t ) L(i) p( t ) L(i) L(i) m, i( k ), k 1 or 2 L( j ) m ' , i( k ) k 1, 2 ' m ' , i( k ) L( j ) L( j ) m ' , i( k ) ' ,j ' L( j ) L( j ) L(i) L(i),, i
18
第三章
雜訊的去除
考慮到本論文欲重建的資料為血管,血管為一連續的物體,在影像中擁有連貫 的性質,因此在本章節中,我們先定義 connected component,之後再用 region grow 的方式,把較小的 connected component 去除。 在圖學理論裡,在沒有方向性的圖中的 connected component 是指任意兩 點經由 path 相連,直到沒有額外的點可以相連時,這一連串的結構就是一個 connected component。 圖 3-1 有三個 connected component 的圖。 (資料來源: WIKKIPEDIA, http://en.wikipedia.org/wiki/Connected_component_%28graph_theory%29)
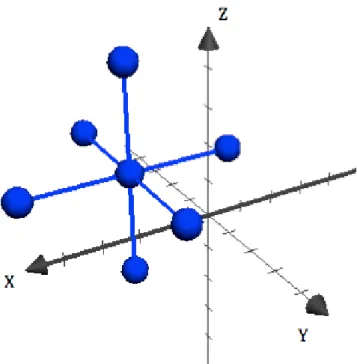
本論文中定義 connected component 為:在一 pixel 的 4-connected 鄰居中, 若彼此 intensity 皆不為零即為相連,直到沒有額外的 pixel 可以相連接時,即為 一個 connected component。如圖 3-2
19
圖 3-2 3D 座標中的一個 connected component。
在找尋 connected component 的實作上,我們使用 region grow 的方式。先找到一 個 intensity 非零的 pixel,把這個點當做起點,如果此點的鄰居也是 intensity 非 零的 pixel,則向外延伸,直到無法在往外擴展為止。而當前所經過的所有 pixel 則 為一個 connected component。 1 0 0 2 1 0 0 2 1 0 0 2 2 4 0 0 2 4 0 0 2 4 0 0 3 5 0 0 3 5 0 0 3 5 0 0 0 2 2 0 0 2 2 0 0 2 2 0 1 0 0 2 1 0 0 2 1 0 0 2 2 4 0 0 2 4 0 0 2 4 0 0 3 5 0 0 3 5 0 0 3 5 0 0 0 2 2 0 0 2 2 0 0 2 2 0
圖 3-3 (a)~(f)為尋找 connected component 的過程;(f) 最終結果。
a b c d e f
20
以下為尋找 connected component 的 pseudo code。
圖 3-4 connected component 的 pseudo code。
在找到各 connected component 之後,我們再將較小的 component 拿掉,下圖為實驗 結果的其中一個 slice
p 為原始影像的一為陣列 ,其值為 0~255 size為影像大小
bool check[size] = false; //判斷此點是否被查找過 queue<int> task;
vector<vector<int> >groups; //記錄 connected component
for (int i=0; i<size; i++) {
if (check[i]==false && p[i]==255 ){ groups.push_back(vector<int>(0)); groups[group_number].push_back(i); task.push(i); check[i]=true; while (!task.empty()) { int t=task.front(); for(a = 4 connected of t) if(p[a]==255 && check[a]==false)
task.push(a); }
21
圖 3-5 去除大小小於 10 的例子‧ (a)原始影像;(b) 結果。
a b
22
第四章
實驗與結果
本論文的實驗資料是由國家同步輻射中心所提供,血管增生的 CT 影像。在實驗 的結果展示中,我們對 FBP 以及 ART 產生的重建結果去除大小較小的 connected component。本論文提出的方法中,我們先用σ=1~4 做 macth filter,接著再做重建 的步驟得到結果影像。
23
圖 4-2 ART 重建結果
60 projections, threshold 55, connected component > 10
圖 4-3 FBP 重建結果
24
圖 4-4 FBP 重建結果
50 projections, threshold 55, connected component > 10
圖 4-5 FBP 重建結果
25
圖 4-6 FBP 重建結果
25 projections, threshold 55, connected component > 50
26
200 projections, threshold 55
圖 4-8 影像辨識結果
先做 macth filter (sigma =1~4),再取其區域最大值的結果
圖 4-9 利用投影特徵的重建結果 100 projections, s = 4,交集 > 80
27
圖 4-10 利用投影特徵的重建結果 50 projections, s = 3, 交集 > 40
圖 4-11 利用投影特徵的重建結果 25 projections, s = 4, 交集 > 40
28 第五章
結果討論及未來展望
在本論文討論的三個方法中,以少量的投影資訊完成重建的結果中,以 ART 的 效果最為理想。FBP 的重建結果中夾雜的大量的雜訊,在投影資料越少的情況下更加明 顯。在重建影像中要擷取出血管資訊也是一個問題,由於部分血管資訊與雜訊的 intensity 較為接近,所以取 threshold 後,造成部分血管資訊會被去除,導致部分血 管會不完整。此問題在特徵重建法中得到了改善,由於我們事先將血管資訊加強,使 得重建過後的影像中,雜訊與血管的 intensity 對比度大為增加,因此得以較清楚的 擷取出血管的資訊。 而本論文特徵重建法當中,嘗詴新的數值重建方法,其產生的結果不甚理想, 其原因與影像辨識步驟有很大關係。由於實驗期間未能找到好的方法在原始資料中辨 識出血管的部分,所以無法獲得夠投影資料中正確的血管位置,因此重建過後的影像 會產生血管分段的情形,特別是在投影資料中,前後血管有重疊的部分,此處的intensity 分佈並不是 match filter 預設的 guassian 分佈,因而會忽略血管的資料, 造成重建時資訊的短缺。因此未來需要在影像辨識這部分多加琢磨,希望能有效的在 投影資料中提取血管資訊。
另外再重建的部分,可以多加利用血管為連續物體的特性與重建後得到的資料, 再做影像辨識,在投影資料中提取更多的血管資訊;不斷的重複影像辨識與重建的工 作去得到更好的重建結果。
29 參考文獻
[1] A. C. Kak and Malcolm Slaney, “Principles of Computerized Tomographic
Imaging”, IEEE Press, 1988.
[2] Emil Y. Sidky1, Chien-Min Kao1, Xiaochuan Pan1, “Accurate image reconstruction from few-views and limited-angle data in divergent-beam CT”, Journal of X-Ray Science and Technology, 2006.
[3] SUBHASIS CHAUDHURI, SHANKAR CHATTERJEE, NORMAN KATZ. MARK NELSON, AND MICHAEL GOLDBAUM. “Detection of Blood Vessels in Retinal Images
Using Two-Dimensional Matched Filters”, IEEE TRANSACTIONS ON MEDICAL IMAGE