內視鏡用熱動式微致動器的設計與製作(II)
Design and Fabr ication of Ther mally Dr iven Microactuator s for Endoscope
計畫編號:NSC 89-2218-E-009-005 執行時間:88.08.01~89.07.31 計畫主持人:徐文祥 國立交通大學機械工程系 共同主持人:邱俊誠 國立交通大學電機與控制工程 參與人員:林育成 林郁欣 游輝德 一.中文摘要 本計畫製作出兩種利用微熱致動器 偏轉微鏡面的結構,第一種可旋轉微反 射鏡致動機構是利用第一年所發展的線 性微馬達,配合立體接頭與連桿,把微 反射鏡由平面 0 度位置驅動至垂直 90 度位置,可使反射鏡在 90 度內調整。此 微致動機構是以 MCNC 之三層多晶矽加 工技術(MUMPs)製作。第二種可旋轉的 微反射鏡致動機構主要包括一個作為微 鏡面的的傾斜平板,一個用來承載此平 板的一個空心圓環,以及用來推動空心 圓環的電熱式側向位移致動器,以使此 傾斜鏡面將可做三百六十度之旋轉運 動。此結構是以雙層多晶矽面微細加工 技術製作,並利用熱塑性,從矽晶片平 面作出立體的微反射鏡結構。 英文摘要
In this project, two types of thermal microactuators integrated with micro mirrors have been designed and fabricated.. The first-type rotary micro mirror is base on the thermally driven linear micro motor developed in the first year to incorporate with micro hinges and
linkages. Then the micro mirror is driven from horizontal position to vertical position. This micromechanism is fabricated by three-layer polySi process MUMPs (Multi-User MEMS Process) at MCNC (Microfabrication Center of North Carolina). The second type of rotary micro mirror is mainly composed of three parts: a inclined plate served as the micro mirror, a hollow disk used to mount the plate, and the laterally driven micro actutators to rotate the hollow disk. The fabrication of this micromechanism is conducted at SRC by two-layer polySi process. The inclined micro mirror is bended out from silicon wafer automatically due to the thermal plastic property.
二.計畫緣由與目的(Introduction)
Micromirrors attract lots of attentions in Micro-Electro-Mechanical Systems (MEMS) for possible application in minimizing optical device. Different types of micromirrors have different applications. For example, a stationary
micromirror can be used as a light or wave guide in optical instruments by reflecting light or wave to the desired direction. Moreover, a movable micromirror can act as an optical switch. For a moving micromirror with high frequency, it can be used as an optical signal modulator. When lots of torsional mircromirrors are set in an array, they can be applied to a printing or projection display device.
A stationary micromirror usually contains a reflecting surface which can be easily made by anisotropic wet etching of silicon. For a movable micromirror, it needs some actuation mechanisms. Selecting proper actuation mechanisms depends on its application. Here we are interested in designing a micromirror with large rotating angle to reflect light into a wide range at low frequency.
In this project, two micro mechanism to rotate micromirrors large angles (90 and 360 degrees) at a low frequency are proposed. The rotating axis of the mirror is inclined to the mirror surface. When the micromirror rotates, the light injected along the rotating axis to the micromirror can be reflected to the periphery of the micromirror. The micromirror can be used in the endoscope or other optical scanning applications.
三.研究方法
The schematic diagram of the first-type design is shown in Fig.1.
Fig.1 Schematic diagram of the first-type micromirro actuating mechanism The device consists of a micromirror, a lateral driven thermal-actuator array, four pair of vertical thermal-actuator, and a locking mechanism that has an I-shaped tether beam and a T-shaped hole that is extended from the bottom of the micromirror. In order to rotate the micromirror along a fixed axis, a set of hinges/torsion-bars was designed according to specific requirements. The self-assembly process is started by actuating the vertical thermal actuators which are placed under the micromirror. The vertical force lifts the micromirror out of the plane of substrate such that the I-shaped tether beam is able to slide into the T-shaped hole to create the necessary lock-up condition. The lateral driven thermal-actuator array that is attached and aligned with I-shaped tether beam is then activated to push/poll the micromirror and cause the micromirror to rotate. In analysis, a post-objective scan system is used to design the size of micromirror from
f
d
λ
∆
≈
1
where d is length of micromirror, λ is the wavelength of laser, f is the focal length of lens, and △ is size of spot.
Also, by simple mechanical analysis, the lift angle of the micromirror is determined.
Fig. 2 Lift angle determination
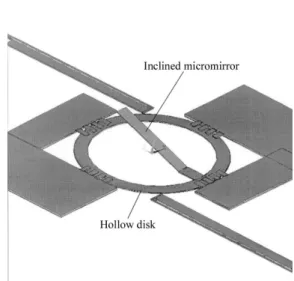
For the second-type micromirror actuating mechanism, the design concept is shown in Fig. 3. As the diagram shown, the inclined micromirror with rotating motion is based on the vibrimotor structure. A thermally driven actuator with lateral motion is employed to rotate the hollow disk. As the hollow disk rotates, so the inclined micromirror on the disk. In order to incline the micromirror, the technology of bend 3D structure out of silicon wafer plane is adopted. The polyimide is employed in our design. The ployimide is put on the plate between the micromirror and the hollow disk. When the polyimide is heated, it shrinks to tilt the micromirror.
Fig. 3 Design concept of the second-type micromirror actuating mechanism
四.結果與討論
Figure 4 shows the fabricated result of the first-type micromirror actuating mechanism by using MUMPs. The rotating angle is found to be around 40 degrees. The mechanism can operate hundreds of hours without failure. However, friction is the critical factor.
Fig. 4 Fabricated result of the first-type actuating micromirror
The fabricated results of the second-type micromirror actuating mechanism is shown in Fig. 5. The microactuator was tested in air by applying an ac triangular
γ φ θ = − b x a b x a c ab b a c ) ( 2 ) ( cos 2 cos 2 2 2 1 2 2 2 1 − − − − − − − = − −
voltage. For 10 V input voltage, the linear displacement of the microactuator is about 10 µm. Because the gap between the micro actuator and the hollow disk was too wide, the microactuator did not contact the hollow disk. Besides, it was observed that one microactuator was not enough to actuate the hollow disk. The gap width must be reduced to generate a larger output force.
Fig.5. Fabricated result of the second-type micromirror actuating mechanism
五.參考資料
[1] K.E Petersen, “Silicon torsional scanning micromirror”, IBM J Res. Dev., 24 (1980), 631-637
[2] V.P. Jaecklin and C. Linder, “Line-addressable torsional micromirrors for light modulator arrays”, Sensors and Actuactors, A 41-42 (1994) 324-329
[3] Jong-Woo Shin, “Design and fabrication of micromirror array supported by vertical Springs”,
Sensors and Actuators, A66 (1998)
144-149
[4] W.-H Juan. “High-Aspect-Ration Si Vertical Micromirror Arrays for Optical Switching”, J. MEMS. Vol. 7,
No. 2, (1998) 207-213
[5] R. A. Buser, “Biaxial scanning mirror activated by bimorph structures for medical Applications”, Sensors and Actuators A. 31 (1992) 29-34
[6] J. Bühler, “Thermally actuated CMOS micromirrors”, Sensors and Actuators
A 46-47, (1995) 572-575
[7] Abraham P. Lee, Per B. Ljung, and Albert P. Pisano, “Polysilicon Micro Vibromotors”, Micro Electro Mechanical Systems’ 92, February 4-7,
1992.
[8] John H. Comtois, “Applications for surface-micromachined polysilicon thermal actuators and arrays”, Sensors and Actuators A58. (1997) 19-25
[9] Kenji Suski, “Insect-Model Based Microrobot with Elastic Hinge”, J. MEMS. Vol. 3, No. 1 (1994) 4-9
[10] Chi Shiang Pan, “An electro-thermally and laterally driven polysilicon microactuator”, J. Micromech. Microeng. 7 (1997) 7-13
[11] K. S. Pister, M. W. Judy, S. R. Burgett, “Microfabricated hinges”,
Sensors and Actuators A. 33 (1992)
249-256
[12] R. R. A. Syms, “Equilibrium of hinged and hingeless structures rotated using surface tension forces”, Journal of microelectromechanical systems.