101 年度水深資料及高程基準
分析工作案
期末報告
主辦機關:內
政
部
執行單位:國立交通大學
中華民國 101 年 12 月
II
目錄
第壹章 緒論 ... 1-1 1-1 前言 --- 1-1 1-2 目標 --- 1-2 1-3 範圍 --- 1-2 1-4 工作項目 --- 1-3 1-4-1 建立衛星追蹤站及其接收儀器檢校機制 ... 1-3 1-4-2 分析離島地區高程基準 ... 1-4 1-4-3 水深資料後處理及製圖作業 ... 1-4 1-4-4 論文期刊 ... 1-5 1-5 人員編組 --- 1-5 1-5-1 工作組織架構 ... 1-5 1-5-2 人員組織及執掌 ... 1-5 1-6 工作執行方法 --- 1-7 1-7 工作進度 --- 1-7 第貳章 建立衛星追蹤站及其接收儀器檢校機制 ... 2-1 2-1 國內外衛星追蹤站建置方式、衛星接收設備偏移檢校方法 ---- 2-2 2-1-1 美國 NGS 所建構 CORS 網絡 ... 2-2 2-1-2 美國 UNAVCO 基站建置規範 ... 2-4 2-1-3 中國地震局 GPS 連續觀測站建置規範 ... 2-5 2-1-4 中南美洲地區 SIRGAS-CON 固定站建置規範 ... 2-7 2-1-5 歐洲地區 EPN 固定站建置 ... 2-8 2-2 檢測內政部東沙衛星追蹤站 --- 2-10 2-2-1 追蹤站及控制點相對關係及追蹤站天線柱與天線盤是否直立 .. 2-11 2-2-2 東沙衛星追蹤站整體評估 ... 2-21 2-3 影響衛星追蹤站接收訊號及訊號品質因素及改善方法 ... 2-23 2-4 適用我國之衛星追蹤站設站評估方式及接收設備檢校模式 ... 2-26 2-5 東沙衛星追蹤站屋舍結構檢查與防水功能補強 ... 2-27 第参章 離島地區高程基準分析 ... 3-1 3-1 國內外水深測量技術及潮位高計算模型 --- 3-2 3-2 東沙地區潮位數據 --- 3-5 3-3 潮位基準面高程探討 --- 3-6 3-4 潮位模型推估及海床地形潮位高 --- 3-10 3-5 東沙潮位站沉陷測量 --- 3-14 第肆章 水深資料後處理及製圖作業 ... 4-1III 4-1 水深資料製圖標準 --- 4-1 4-1-1 IHO-S57 ... 4-2 4-1-2 HO-S100 ... 4-2 4-1-3 IHO-S102 ... 4-2 4-2 水深資料之高程基準及相關資訊之軟體及格式 --- 4-3
4-2-1 CARIS Marine GIS ... 4-3
4-2-2 Fledermaus ... 4-4 4-2-3 ArcGIS ... 4-4 4-2-4 QGIS ... 4-4 4-3 東沙地區等深線 --- 4-5 第伍章 論文期刊 ... 5-1 第陸章 結論與建議 ... 6-1 6-1 結論 --- 6-1 6-2 建議 --- 6-1 參考文獻 附錄一 審查意見及回覆 附錄二 衛星追蹤站邊角測量觀測記錄 附錄三 沉陷測量(另行裝訂) 附錄四 東沙潮位分析(另行裝訂) 附錄五 論文期刊 附錄六 IHO 水深資料製圖標準 附錄七 QGIS 使用教育訓練手冊 附錄八 Fledermaus7.0 等高線演算法技術文件 附錄九 衛星追蹤站偏移檢校方法草案 附錄十 東沙潮位站訊號線現況
IV
表目錄
表 1-1 計畫工作人員組織表... 1-6 表 1-2 工作項目實際進度 ... 1-9 表 2-1 追蹤站天線盤及其控制點邊角觀測量(07) ... 12 表 2-2 追蹤站天線盤及其控制點邊角觀測量(11)_1 ... 2-13 表 2-3 追蹤站天線盤及其控制點邊角觀測量(11)_2 ... 2-13 表 2-4 GPS 觀測時段表 ... 2-14 表 2-5 邊角測量(07)與 GPS 控制測量與公告坐標化算角度成果 ... 2-15 表 2-6 邊角測量(07)與 GPS 控制測量與公告坐標化算邊長成果 ... 2-15 表 2-7 邊角測量(11)與公告坐標化算角度成果 ... 2-15 表 2-8 邊角測量(11)與公告坐標化算邊長成果 ... 2-16 表 2-9 邊角測量(07)與 GPS 控制測量角度成果檢核 ... 2-16 表 2-10 邊角測量(07)與 GPS 控制測量邊長成果檢核 ... 2-17 表 2-11 邊角測量(11)角度成果檢核 ... 2-17 表 2-12 邊角測量(11)邊長成果檢核 ... 2-18 表 2-13a 7 月測量坐標誤差與較差(計算成果減公告,單位:公分) ... 2-18 表 2-14 天線盤與天線柱中心水平角 ... 2-20 表 2-15 天線盤左右底分別量測天頂角成果 ... 2-21 表 2-16 追蹤站訊號品質檢測成果 ... 2-26 表 2-17 追蹤站施工情形 ... 2-30 表 3-1 平均海水面之計算 ... 3-7 表 3-2 分潮名稱 ... 3-8 表 3-3 各航帶時間資訊 ... 12 表 3-4 二等基本控制測量之精度規範 ... 3-15 表 3-5 直接水準及 GPS 控制點 ... 3-16 表 3-6 水準測量精度表 ... 3-17 表 3-7 GPS 控制測量 ... 3-18 表 3-8 GPS 控制測量成果 ... 3-19V
圖目錄
圖 1-1 東沙環礁地理位置 ... 1-2 圖 1-2 東沙島重要景點位置... 1-3 圖 1-3 人力工作配置圖 ... 1-6 圖 1-4 工作流程圖 ... 1-8 圖 2-1 衛星追蹤站組成架構... 2-1 圖 2-2 東沙衛星追蹤站與其副點分布 ... 2-11 圖 2-3 追蹤站副點 TSAA ... 2-11 圖 2-4 檢測天線中心是否位於天線柱中心線示意圖 ... 2-20 圖 2-5a 精密單點定位 EN 值變化趨勢 ... 2-24 圖 2-5b IGS 站 TCMS 因速度場造成平面坐標變化趨勢 ... 2-24 圖 2-6 精密單點定位 h 值變化趨勢 ... 2-25 圖 2-7 東沙混凝土氯離子檢驗報告 ... 2-29 圖 3-1 各式計算平均海水面之流程示意圖(內政部國土測繪中心,95b) .. 3-4 圖 3-2 潮時與潮差示意圖 ... 3-10 圖 3-3 潮位高基準概念 ... 3-11 圖 3-4 研究航帶分布 ... 3-12 圖 3-5 航帶 1 與南北向航帶重疊區之潮時對潮位高之差值關係 ... 3-13 圖 3-6 航帶 2 與南北向航帶重疊區之潮時對潮位高之差值關係 ... 3-13 圖 3-7 直接水準測量網圖 ... 3-15 圖 3-8 潮位站水準點 TG77(內政部,100) ... 3-16 圖 4-1 平均低低潮位與平均海水面相對位置示意圖(Hell, 2009) ... 4-3 圖 4-2 等深線展示介面 ... 4-5 圖 4-3 等深線圖幅接合表 ... 4-6 圖 4-4 等高線套疊 5 千分之 1 圖框 ... 4-7VI
摘要
本案延續內政部「以透水光達測繪技術測製東沙地區數值地形模型工 作」案,使用測深光達掃瞄東沙環礁數據進行後續研究。透過建立衛星追 蹤站及其接收儀檢校機制,並分析追蹤站接收訊號品質,提出適用我國衛 星追蹤站設站之評估及檢校方式。另外透過檢測東沙地區高程基準值及分 析潮位資料等方式,重新檢討該地區之高程基準,並產製等深線圖層,使 水深資料可適用於多元化應用領域。 本案蒐集國外五個單位組織衛星追蹤站建置方式,並以邊角測量及 GPS 測量檢測內政部東沙衛星追蹤站,目前天線盤大略向 TSAA 方向傾斜, 相對於三個副點,TNSM 與公告坐標有約一公分之移位。並以 TEQC 軟體 計算接收訊號品質。另外提出衛星追蹤站設站評估方式及接收設備檢校模 式草案,並進行衛星追蹤站屋舍結構檢查與防水功能補強。 本案接續前述成果,持續監測東沙控制點位及東沙潮位站,進行兩次 沉陷測量及兩次潮位站維護,並未觀察到明顯沉陷。另蒐集東沙地區 511 天潮位數據,分析東沙地區潮位數據及潮位基準面高程探討。 本案蒐集國際海道測量組織 S-57、S-100 及 S-102 等 S 系列相關水深 資料製圖標準。並利用測製之數值地形模型資料產製東沙地區 1 公尺、5 公尺、10 公尺等深線。 本案投稿研討會論文 2 篇,最後提出結論及後續建議。衛追站天線穩 定度分析部分建議加入台灣本島之一個衛星追蹤站,如陽明山站,進行比 對分析。控制點監測、潮位站維護與潮位資料分析為持續性之基礎空間資 訊蒐集工作,建議持續進行。目前已確定東沙環礁內不只是潮時不一,亦 有潮差存在,建議進一步探討。未來研究可嘗試塊礁(塊狀礁)分布圖之產 製,塊礁分布圖對該區域棲地調查將有正面功效,先以少數圖幅為標的, 確認產製之作業方法與流程。VII
Abstract
This project is a continuation of the Dongsha bathymetric lidar survey project conducted by the Ministry of Interior. The goal of this project includes the analysis of the satellite tracking station signals quality, developing validation scheme for the stability of the GPS antenna, Dongsha tidal and vertical datum analysis, and producing contour layers for multipurpose use of the bathymetric dataset.
The specification from five international agencies on the establishment of satellite tracking stations is collected. GPS and triangulation surveys were performed for examining the Dongsha satellite tracking station. It is revealed that the antenna tilts toward the TSAA. The current position of TNSM has shifted about one centimeter relative to the three surrounding control points, based on the published coordinates. The quality of the GPS signal calculated by the TEQC software was good. A draft assessment model for the satellite tracking station is proposed. The maintenance of Dongsha tracking station buildings is performed, including the structure enforcement and water proof of the roof.
Two surveying missions for monitoring the subsidence of Dongsha control points, including the tidal station reference point were conducted. Two regular maintenance of the tidal station were also carried out. Based on the surveying result, no significant subsidence was observed. 511 days tidal data were collected and analyzed. The elevation of different tidal datum is calculated. This project collected and summarized the mapping standards related to IHO S-57, S-100 and S-102. Intervals of 1m, 5m and 10m contours were derived from the Donghsa digital elevation model (DEM).
Two conference papers derived from this project were presented. For the future work, it is recommended that the stability analysis scheme for satellite tracking station could be applied to stations in Taiwan, such as YNSM, for comparison and analysis. Control point monitoring, tidal station maintenance and tidal data analysis are the fundamental spatial data infrastructure work, and should be continued. This project discovered that the Dongsha Atoll existed not only with different tidal phases, but also with different tidal ranges. It is suggested that further research on this subject is necessary. The spatial distribution of patch reef could be important for habitat study. The standard working scheme should be studied.
1-1
1 第壹章 緒論
1-1 前言
由於全球導航衛星系統(Global Navigation Satellite Systems, GNSS)之軌 道計算均以橢球體為模型,因此以 GNSS 直接觀測得到的高程為橢球高 (Ellipsoidal Height),屬於幾何高(Geometric Height)。但是在陸域民生與製圖, 所需者為正高(Orthometric Height)或正常高(Normal Height);在海域測量或 製圖時,則常需使用以潮位為基準之潮位高。若在小區域測量時,可以將 該範圍內之大地起伏視為常數,亦即正高差等於橢球高差。通常可以藉此 種方法由基準點或已知高程控制點,以 GNSS 引測得到未知點的正高。而 在小範圍海域內之潮汐特性可以視為相同,因此若在已知潮位站觀測潮位, 配合潮位站之橢球高及船隻即時測量的橢球高與水深觀測值,可以獲得以 潮位高為基準之水深值。但是若在大範圍進行陸域地形測量,則需要有解 析度及精度較佳的大地起伏模式,才能將橢球高轉換成為正高;而若在大 範圍的海域或該海域之潮汐模式複雜的情形下,若單純的觀測該海域附近 一個潮位站的潮位,仍然不足以獲得以潮位高為基準之水深值。因此依據 高程現代化(Height Modernization)觀念,如使用 GNSS 進行地形測量,則應 使用數值大地起伏模型進行大地起伏化算以轉換為正高;而在海域,則需 使用該區域之潮汐模型進行化算,以轉換得潮位高。使用橢球高為基礎之 優點在於橢球高的基準全球一致,並無區域性的高程基準差異。此外,若 目前暫時因故並無解析度或精確度較高的大地起伏模式或潮汐模式,待未 來若有較佳的大地起伏模式或潮汐模式時,仍可再加以轉換成為品質較佳 的地形正高值或以潮位為基準之水深值。 高程現代化觀念在內政部 100 年度「以透水光達測繪技術測製東沙地 區數值地形模型工作」經由實證,確為可行之方式。惟潮位模式需經由配 合蒐集長期潮位資料並加以化算,方能驗證獲得精確之潮位高資料,為求
1-2 取更精確之水深資料,並推廣空間資訊之流通,本案計畫透過檢測當地地 區高程基準值及分析潮位資料等方式,重新檢討當地地區高程基準,使水 深資料可適用於多元化應用領域。 1-2 目標 本案透過建立衛星追蹤站及其接收儀檢校機制,並分析影響追蹤站接 收訊號及訊號品質之因素,提出東沙衛星追蹤站完整之檢校報告,及適用 我國衛星追蹤站設站之評估及檢校方式。另外透過檢測東沙地區高程基準 值及分析潮位資料等方式,重新檢討該地區之高程基準,使水深資料可適 用於多元化應用領域。 1-3 範圍 本案之工作範圍為東沙環礁,距離小港機場約 240 浬(直線距離),位置 如圖 1-1 所示,東沙島上設施與重要景點位置如圖 1-2 所示。 1 圖 1-1 東沙環礁地理位置
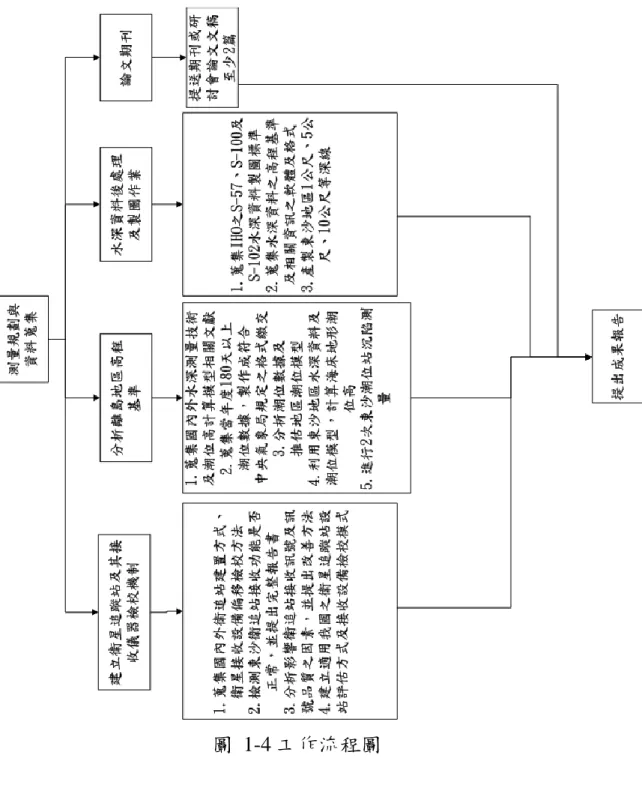
1-3 圖 1-2 東沙島重要景點位置 (擷取自 http://npgis.cpami.gov.tw/HY/index.cfm) 1-4 工作項目 本案之工作項目可大分為三項,均以東沙島上之設施與情況為研究主 體。第一個項目為東沙衛星追蹤站,第二個項目為東沙高程基準、潮位站、 沉陷測量、以及東沙環礁潮位高地形計算,第三項為與製圖相關之圖資生 產工作,謹分別臚列如下: 1-4-1 建立衛星追蹤站及其接收儀器檢校機制 1.蒐集國內外衛星追蹤站建置方式、衛星接收設備偏移檢校方法(至 少需蒐集 3 種建置架構)。 2.檢測內政部衛星追蹤站(東沙)衛星資料接收功能是否正常,並提 出完整報告書(含檢測理論、檢測方法、佐證數據及檢測結論)。 3.分析影響衛星追蹤站接收訊號及訊號品質之因素,並提出改善方 法。 4.建立適用我國之衛星追蹤站設站評估方式及接收設備檢校模式。
1-4 1-4-2 分析離島地區高程基準 高程基準之穩定與否深切影響國家高程系統建立,無論正高計算 或潮位高計算,均需倚賴精確之高程基準。臺灣地區之高程系統係以 臺灣水準原點為起算點,其建立係參考基隆港之基隆潮位站長期潮位 觀測資料而得。為能準確的確定潮位資料,除潮位儀本身的準確度外, 尚須確保潮位站的穩固,以排除潮位站的沉陷因素,所以必須長期與 定期檢測,以了解潮位站之穩定性。內政部「以透水光達測繪技術測 製東沙地區數值地形模型工作」業已開始進行東沙控制點位沉陷測量。 本項工作接續前述成果,持續監測於內政部 100 年度「以透水光達測 繪技術測製東沙地區數值地形模型工作」案中已測量之東沙控制點位 (含東沙潮位站),檢測是否發生沉陷,以確保潮位資料品質,主要工 作項目如下: 1.蒐集國內外水深測量技術及潮位高計算模型等相關文獻。 2.蒐集東沙地區潮位數據,並製作成符合中央氣象局規定之格式繳交 (需繳交東沙地區當年度至少 180 天以上潮位數據,資料格式參考 中央氣象局說明 http://www.cwb.gov.tw/)。 3.分析東沙地區潮位數據,並推估地區潮位模型。 4.利用東沙地區水深資料及潮位模型,計算該區海床地形潮位高。 5.進行東沙潮位站沉陷測量 2 次。 1-4-3 水深資料後處理及製圖作業 內政部前於 97 年至 100 年間,測製東沙地區數值地形模型資料, 資料範圍含括東沙地區陸域及海域環礁資料,本項工作係利用測製之 數值地形模型資料,轉繪適用於地理資訊系統之應用圖層資料。主要 工作項目如下:
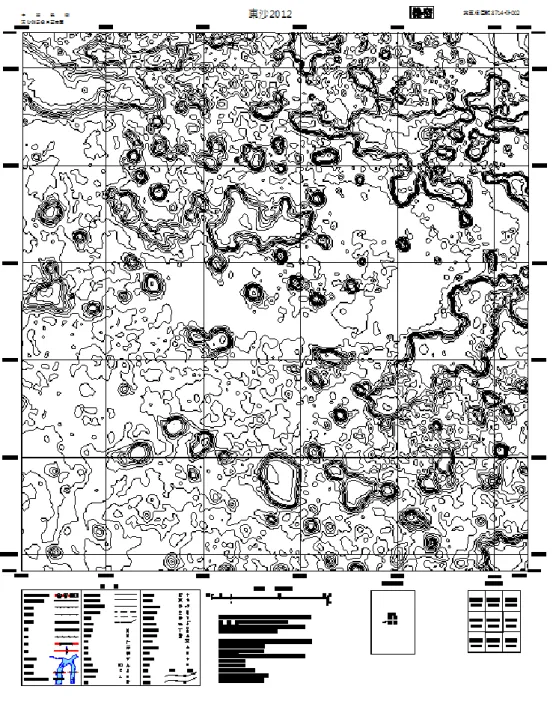
1-5 1.蒐集國際海道測量組織 S-57、S-100 及 S-102 等 S 系列相關水深資 料製圖標準。 2.蒐集水深資料之高程基準及相關資訊之軟體及格式,並建議本案適 用之軟體及格式。 3.產製東沙地區 1 公尺、5 公尺、10 公尺等深線之地理資訊系統應用 圖層資料(資料格式不限,但需檢附可供免費瀏覽、使用之程式或 瀏覽器)。 1-4-4 論文期刊 提送期刊或研討會論文文稿至少 2 篇。 1-5 人員編組 1-5-1 工作組織架構 本案將由本校負責整體計畫之執行,部份工作邀集中山大學海洋 環境與工程系協助辦理。本案由史天元教授擔任計畫主持人,負責擬 定計畫及執行管理,廖志中教授負責協助計畫進度管控及工作協調, 中山大學海洋環境與工程系薛憲文教授負責潮位數據分析及水深資 料產製。本案工作團隊各主要成員分組及所擔任之工作項目如圖 1-3 所示。 1-5-2 人員組織及執掌 為確保本案之成功,除由本校史天元教授擔任計畫主持人,負責 擬定計畫、進度管控、工作協調及成果整合外,並邀集中山大學協助 辦理。計畫工作人員組織如表 1-1 所示。
1-6 圖 1-3 人力工作配置圖 表 1-1 計畫工作人員組織表 計畫職務 姓名 現 職 學 經 歷 計畫主持人 史天元 交通大學土木工程系 暨防災與水環境研究中心 教授 加拿大紐布朗斯維克大學測量博士 國立交通大學土木工程學系副教授 協同主持人 薛憲文 中山大學海洋環境及工程系 副教授 美國西雅圖華盛頓大學博士 國立台北工專土木科副教授 協同主持人 廖志中 交通大學土木工程系 暨防災與水環境研究中心 教授 美國科羅拉多大學土木工程博士 國立交通大學土木工程學系副教授 研究人員 王慧蓉 交通大學防災與水環境研究中心 工程師 國立交通大學土木工程研究所碩士 研究人員 陳雅信 交通大學防災與水環境研究中心 副工程師 國立交通大學土木工程研究所碩士 博士生 林暐尊 交通大學土木工程系 博士生 國立交通大學土木工程研究所 博士生 計畫助理 鍾佳廷 交通大學防災與水環境研究中心 行政助理 國立暨南大學學士
1-7 1-6 工作執行方法 利用以 GNSS 直接觀測得到的高程為橢球高,需進行大地起伏化算方 能取得正高,如要取得潮位高資料,則需進行潮位資料化算。而潮位模式 需經由蒐集長期潮位資料並加以化算,方能獲得精確之潮位高資料。東沙 地區之連續式潮位站於 98 年 9 月 14 日開始蒐集資料,於內政部之 100 年 「以透水光達測繪技術測製東沙地區數值地形模型工作」計畫案僅有單一 潮位站 494.37 天之數據。本案持續蒐集潮位站之潮高觀測資料,並由測深 光達作業時所得重疊區潮位高差探討潮位模型,利用水深資料及潮位模型, 計算該區海床地形潮位高,使水深資料可適用於多元化應用領域。另外, 由於高精度地形測量成果為管制資料,本案將上述計畫之成果進行後處理, 產製 1 公尺、5 公尺、10 公尺等水深線,以供空間資訊之流通。 1-7 工作進度 本案自民國 101 年 3 月 21 日至 12 月 10 日完成所有工作項目,工作流 程圖如錯誤! 找不到參照來源。所示,整個工作期間約為 9 個月,茲將各項 工作及時程列如表 1-2。整體工作進度符合預期。
1-8
1-9 表 1-2 工作項目實際進度 工作項目 年別 101 年 月份 3 4 5 6 7 8 9 10 11 12 一、建立衛星追蹤站 及其接收儀器檢校機 制 二、分析離島地區高 程基準 三、水深資料後處理 及製圖作業 四、論文期刊 五、報告繳交 備註 工 作 計 畫 書 期 中 報 告 期 末 初 稿 及 定 稿 預定進度累計百分比 (%) 5 20 30 40 55 60 70 80 95 100
2-1 2
第貳章 建立衛星追蹤站及其接收儀器檢校機制
衛星追蹤站為長期全天候觀測之接收站,具有相當高精度站位坐 標,於一、二、三等衛星控制點施測時加入衛星追蹤站以提高成果精 度以符合控制點精度要求;此外衛星追蹤站亦可提供進行衛星定位施 測者同時段觀測數據,具有提升定位精度、降低儀器及人力使用數量 之便利性。衛星追蹤站之架構如圖 2-1 所示,主要可分為儀器房、天 線柱及氣象設備三部分。儀器房內放置衛星接收儀、電腦及不斷電系 統等設備,每日下載資料儲存於在電腦中,於固定時間以電子函件 (E-mail)方式傳送至內政部管理人員;氣象設備包含溫度計、濕度計、 壓力計等,記錄追蹤站周圍氣候資訊;天線柱上則安裝有衛星接收儀 天線,接收衛星訊號。 衛星接收儀天線 UPS 不斷電系統 天線柱 氣象設備 工業用電腦 每日下載資料 Email 內 政 部 管 理 人 員 衛 星 訊 號 衛星接收儀 氣壓、溫度、 濕度資料 儀器房 圖 2-1 衛星追蹤站組成架構2-2 以下彙整國內外衛星追蹤站建置規範,並概述東沙衛星追蹤站現 況,最終提出可能之檢測方法,建立國內衛星追蹤站檢校模式。 2-1 國內外衛星追蹤站建置方式、衛星接收設備偏移檢校方法 衛星追蹤站之設置需考量其需提供長期運作且具高精度定位品 質,位址選取及硬體設備需有周延考量。各國對於追蹤站建置具有不 同規範標準,該些標準皆係以提高衛星訊號品質及長期使用性作為考 量。但是,各個組織皆無「衛星接收設備偏移檢校方法」之規範。 國內設置 GPS 固定站之單位包含內政部、內政部國土測繪中心、 中央研究院、工研院量測中心、水利署沉陷觀測計畫等,在本案進行 中將接洽上述單位,了解其相關規範與作為。以下就所蒐集國外各單 位建置衛星追蹤站訂定規範簡述之,依序為美國國家大地測量局 (National Geodetic Survey, NGS)所建構 CORS (Continuously Operating Reference Stations) 網 絡 、 美 國 UNAVCO (University NAVstar COnsortium) 基站建置規範、中國地震局 GPS 連續觀測站建置規範、 南 美 洲 地 區 SIRGAS-CON 固 定 站 , 以 及 歐 洲 地 區 EPN(EUREF Permanent Network)固定站建置規範。 2-1-1 美國 NGS 所建構 CORS 網絡 美國 NGS 所建構 CORS 網絡提供全球定位系統數據,該網 絡由政府機關、學術單位及私人機構共同組成,並接受新固定站 建置申請,加入 CORS 網絡成員並共享衛星接收數據。至 2011 年 11 月止,全球 CORS 網絡已有 1800 餘站,並持續擴增。固定 站建置以符合以下八項敘述要求為建置標準(NOAA, 2006)。 (1)固定站操作者: 以電子郵件與 CORS 管理中心進行基站訊息傳達聯繫,並有 確認、維護該基站數據品質及硬體設備更新告知之義務。
2-3 (2)基樁: A、高於地面約 1.5m 以達到近似 NGS 在天線相位中心率定時 之幾何狀態。 B、基樁地下深度需達約 4m,避免不穩定地質條件以求穩固。 C、以衛星天線參考點仰角 10 度以上透空區域無障礙物為原 則,並避免鄰近電磁波放射干擾。 D、天線基座需有定平及定天線方位設備。 E、建議基樁為圓錐形,且基樁頂端與天線間距離需小於 5cm 或大於 20cm。 (3)儀器設備: A、天線至少具有接收雙頻(L1、L2)功能,記錄 30、15、10、 5 或 1 秒之時間取樣間格。 B、NGS 率定天線相位中心模式可供獲取,且不建議使用天線 罩;若必須使用則需提供天線對應天線罩之相位中心模 式。 (4)數據儲存及通訊: A、NGS 與基站操作者須提供全天候下載服務,數據傳輸皆 透過網路。 B、資料名稱及儲存路徑名稱以 GPS 時命名歸類。 (5)固定站詮釋資料(Metadata): A、建立完整基站資訊,包含站位、基樁配置、使用儀器等。 B、固定站照片建檔,包含基樁、連接基座,以及自 4 個方位 拍攝與天線參考點等高度之天線。
2-4
(6)固定站站別評估:依所接收數據發布方式不同分為 Cooperative CORS 及 National CORS;前者由固定站操作者架設網站提供數據 下載,後者接收數據需直接至 NGS 網頁取得。
(7)Cooperative CORS 網頁:
A、架設伺服器提供 RINEX-2 資料下載,並提供 10-12 張固定 站照片及記錄。
B、提供 CORS 及 Cooperative CORS 連結。
(8)品質控管:使用 UNAVCO 所開發 TEQC(Translating, Editing, Quality Checking )免費軟體作為基站接收數據之品質確認。 2-1-2 美國 UNAVCO 基站建置規範 UNAVCO 為美國一非營利研究組織,以促進地球科學研究 及教育為宗旨,其衛星固定站建立在於監測地表變動相關應用 上,固定站選址係以鄰近斷層、地滑及沉陷地區為優先考量。 就以下 7 項敘述為 UNAVCO 基站建置規範(Fisher, 2010)。 (1)基站選址 A、以岩石地基為優先考量,具安全、可長期維持性。 B、避免基站周圍 15m 內有反射來源以降低多路徑效應發生可 能。 C、基站遠離強微波來源至少 1km 以避免訊號干擾。 (2)基樁 A、以多個深基樁較佳。 B、基柱頂端應避免鋼筋或其他金屬物影響接收訊號。 (3)接收儀規格 A、可接收雙頻(L1、L2)訊號,多通道獨立接收;可接收自 GPS 及 GLONASS 訊號,2010 年後增加 Galileo 衛星訊號。
2-5 B、可接收達 20Hz 取樣頻率訊號,相位精度達到約 1mm。 C、儲存並提供如 Raw、RINEX、BINEX 等多種格式。 (4)接收天線 A、以抗波環圈(choke ring)天線類型較佳,且具有抵抗多路徑 效應底板。 B、天線基座具有定心、定平及天線方位指向。 C、不建議使用天線罩,若需要則其必須製成材料及形狀均勻, 並與天線進行相位中心率定。 (5)輔助感測儀器 A、氣象感測儀取得天線周圍壓力及溫度;傾斜感測儀以確保 測站及基樁穩固,並對火山造成地殼變形監測。 B、感測數據儲存於接收儀內。 (6)電源供應 A、消耗功率一般 6-20W 不等,依接收及傳輸設定而異。 B、可附加太陽能或風力發電設備。 (7)數據傳輸及管理 A、因應數據使用需求具有不同傳輸方式,而一般仍以網路傳 輸為主。 B、使用 TEQC 軟體作接收數據檢驗。 2-1-3 中國地震局 GPS 連續觀測站建置規範 大陸地區 GPS 連續觀測站建置規範係以符合國家一、二等 水準測量及建築抗震設計規範為參考標準,規範內容概略分為 以下五項(中國地震局, 2006)。 (1)觀測場地勘查
2-6 A、基站點位應處於穩固地層上,利於長期保存及觀測,可建 於現有地震台、氣象站潮位站周邊。 B、測點仰角 15 度以上透空區域無障礙物,並避免於微波站、 嚴重雷擊區域。 C、距鐵路至少 200m、公路 50m 以避免劇烈振動影響。 (2)基柱要求 A、基柱採用鋼筋混凝土,高於地面 3~5m;墩面矩形需大於 0.4×0.4m,圓形直徑大於 0.5m。 B、氣象觀測設備安置於 GPS 天線 10m 範圍內,高度與天線 高差±0.2m 內。 (3)儀器室 儀器室內需控制於接收儀正常運作溫度範圍,並採用避雷、 防盜、防破壞等措施。 (4)相關設備配置要求: A、GPS 接收儀需有 12 個以上通道,能同時接收地平線上所 有衛星之雙頻(L1、L2)訊號,數據取樣頻率應不小於 10Hz; GPS 天線之相位中心需穩定且附有指北標誌,天線本身有 強抗干擾性能。 B、氣象觀測採用數位氣象儀,規格要求如下:溫度範圍-40 ℃~55℃,精度±0.2℃;濕度範圍 0%~100%,精度±5%; 氣壓 53, 329Pa~106, 658Pa,精度±50Pa。儀器自動觀測記 錄,取樣頻率不小於 0.2Hz,可自動或人工下載數據。 C、記錄儲存設備需滿足 GPS 連續觀測站數據下載、通訊傳 輸要求,具長期連續運行能力。
2-7 D、使用有線通訊或無線通訊方式進行數據傳輸,傳輸速度需 在 9.6kbps 以上。 E、電力來源包含太陽能或 UPS 供電系統,需有自動穩壓、保 險絲保護及防雷等裝置。 (5)基站資料歸檔: A、選址過程中針對周圍地理、地質環境之資料蒐集與建置過 程報告,配合照片說明施工前後概況。 B、GPS 觀測站點之記。 2-1-4 中南美洲地區 SIRGAS-CON 固定站建置規範
SIRGAS-CON(SIRGAS Continously Operating Network)目 前共約 250 餘固定站,其中 48 站屬於全球 IGS 站,屬於中南 美洲地區之衛星固定站網絡系統。SIRGAS-CON 固定站建置規 範如下簡述項目(SIRGAS, 2010)。 (1) 站址選擇 A、 設站位址需選擇屬於地殼區塊穩固區域內,應避免在活動 斷層、存在使設站區域沉降或變形之潛在變動區域設站; 地基以穩固之岩石材質較佳。 B、 接收站址周圍仰角 5 度以上避免有阻礙物,周圍環境 變異如建築物增建、植栽增長等應盡量避免。 C、 避免過度電磁波直接干擾以及易造成多路徑效應之反射 面。 D、 若選擇站址於已存在建築物屋頂,該建築物需以建造至 少滿五年,牆面無肉眼可見裂縫,且基樁位置應位於主 要荷重牆面上。 (2) 基樁
2-8 A、 基樁建置應使天線垂直安置於該固定站所定義點位之 上。 B、 建議設置 2 或 3 控制點於固定站約距離 200 公尺周圍, 可監測固定站之變動。 C、 建置基樁之鋼筋、水泥等材料需能抵抗因長期受環境因 素而可能致使氧化、腐蝕影響。 D、 建議配有防雷殛裝置。 (3) 儀器設備 A、 接收儀可觀測 L1、L2、P2 訊號,以及至少 C1 或 P1 兩者 之一訊號;同時記錄至少 10 顆衛星訊號,接收頻率至少 為 30 秒 1 筆。 B、 如有因技術方面之更新,如有新增衛星訊號可供接收,則 建議設備更新及升級,否則應盡量避免設備更動。 C、 天線盤應水平安置並將指北標示確實對向北方。 D、 以抗波環圈(choke ring)天線類型較佳,且除了天候環境 、天線安全考量外,不建議使用天線罩。 E、 若未使用天線罩,則應以不拆卸方式每年至少清理 1 次天 線盤。 (4) 運作管理 A、 電源供應及通訊傳輸需持續運作,以維持追蹤站能正常進 行。 B、 追蹤站輔以水準、重力觀測,以達到與一級水準點連結之 精密垂直網為佳。 2-1-5 歐洲地區 EPN 固定站建置
2-9
建置之 GPS 連續追蹤站網絡,該網絡為建立 ETRS89(European Terrestrial Reference System 89)參考坐標系統,即歐洲地區精密 GPS 坐標框架。以下為 EPN 固定站建置規範概述: (1) 儀器設備及運作 A、 接收儀可觀測 L1、L2、P2 訊號,以及至少 C1 或 P1 兩者 之一訊號;同時記錄至少 8 顆衛星訊號,接收頻率至少為 30 秒 1 筆。 B、 能接收來自所有衛星訊號。 C、 天線盤穩固安置使之與天線盤安置點相對移動量小於 0.1mm;除了本身故障不堪使用因素外,不進行天線盤更 動。 D、 除了天候環境、天線安全考量外,不建議使用天線罩;非 半球形之天線罩應盡可能避免選用。 E、 電源供應及通訊傳輸需持續運作,以達追蹤站能正常進 行。 F、 建議配合精密氣象觀測儀器同步觀測,觀測資訊以 RINEX 檔案格式儲存與傳輸。 G、 鼓勵配合其他地球物理訊號觀測儀器如 SLR (Satellite Laser Ranging), VLBI (Very-Long Baseline Interferometry), DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite), 重力儀、潮位儀、地震儀等設施以 增進追蹤站科學研究價值。 (2) 點位 A、 點位於仰角 5 度以上之阻礙物需盡可能減少。 B、 訊號接收品質需經檢驗,如外來雷達訊號干擾與多路徑效 應影響。
2-10
C、 天線參考點(Antenna Reference Point, ARP)於天線安置時 位於固定站定義點位垂直上方。 D、 站址選擇需選擇屬於地殼區塊穩固區域內,應避免在活動 斷層、存在使設站區域沉降或變形之潛在變動區域設站; 地基以穩固之岩石材質較佳。 E、 避免周圍過度電磁波直接干擾以及易造成多路徑效應之 反射面。 (3) 站址記錄 A、 點位相關描述需完整記錄於 EPN 站址記錄檔案中。 B、 該固定站相關變更均需記錄於站址記錄文件中,文件需上 傳更新至 EPN 管理中心。 2-2 檢測內政部東沙衛星追蹤站 東沙衛星追蹤站(TNSM)位於東沙本島中央略偏東南處,其鄰近周 圍設有 TSAA、TSAB 及 TSAC 三個控制點(如圖 2-2),其中 TSAA 為追蹤站副點(圖 2-3),TSAB 及 TSAC 為二等衛星控制點。東沙衛 星追蹤站之設置依照與臺灣本島其他衛星追蹤站相同之規範與設計, 由於東沙之表層土壤為珊瑚礁風化後形成,其固結性低,因此本站之 穩定度較內政部其他衛星追蹤站之疑慮為高。以下分為 1.檢測 TNSM 與 TSAA、TSAB、TSAC 相對關係及 TNSM 天線柱與天線盤是否直 立;2.東沙衛星追蹤站整體評估。
2-11
圖 2-2 東沙衛星追蹤站與其副點分布
圖 2-3 追蹤站副點 TSAA
2-2-1 追蹤站及控制點相對關係及追蹤站天線柱與天線盤是否直立
追蹤站(TNSM)與周邊鄰近 3 個控制點 TSAA、TSAB 及 TSAC 以全測站經緯儀(Total Station)邊角測量以及 GPS 測量方 法對追蹤站進行檢驗。邊角測量使用全測站經緯儀(Total station) 順序架設於各副點上,除了觀測其他副點上之稜鏡覘標,檢測 距離、夾角之外,同時觀測追蹤站天線參考點量得夾角,求得 追蹤站天線與控制點相對關係;GPS 控制測量工作採於同一時 段在其中兩控制點架設 GPS,並與衛星追蹤站(TNSM)接收資料
2-12 使用 BERNESE 軟體共同進行網形平差解算。 邊角測量於 101 年 7 月及 11 月兩次登島皆進行施測。第一 次施測於 7 月 21 日上午 9 時,以單一觀測者、單一次測回進行; 第二次邊角測量於 11 月 5 日下午 1 時,採兩名觀測者各觀測三 測回進行。邊角測量施測時 3 個控制點皆採正倒鏡觀測,控制 點對準覘標稜鏡量測角距,天線盤則對準天線盤圓柱頂觀測角 度。每一對點觀測 1 次,7 月及 11 月正倒鏡觀測量平均結果依 序如表 2-1 至表 2-3 所列,其中表 2-1 為 7 月控制點角度閉合 差為 6 秒。 表 2-2、表 2-3 為 11 月份由兩觀測者各別測得之三測回平 均,控制點角度閉合差分別為 2 秒與 4.8 秒。兩次邊角觀測記 錄皆列於附錄二。 表 2-1 追蹤站天線盤及其控制點邊角觀測量(07) 測站 觀站 角度 ° ’ ” 距離(m) TSAB TSAA 29.269 TNSM 31 48 57 TSAC 59 27 40 31.272 TSAC TSAB 31.273 TNSM 26 32 22 TSAA 56 57 46 30.074 TSAA TSAC 30.070 TNSM 31 44 38 TSAB 63 34 40 29.275
2-13 表 2-2 追蹤站天線盤及其控制點邊角觀測量(11)_1 測站 觀站 角度 ° ’ ” 距離(m) TSAB TSAA 29.2755 TNSM 31 49 28.3 TSAC 59 27 32.7 31.2725 TSAC TSAB 31.2723 TNSM 26 32 9.8 TSAA 56 57 55.8 30.0735 TSAA TSAC 30.0740 TNSM 31 44 18.7 TSAB 63 34 33.5 29.2772 表 2-3 追蹤站天線盤及其控制點邊角觀測量(11)_2 測站 觀站 角度 ° ’ ” 距離(m) TSAB TSAA 29.2758 TNSM 31 49 22.7 TSAC 59 27 30.5 31.2718 TSAC TSAB 31.2725 TNSM 26 32 10.2 TSAA 56 57 59.5 30.0745 TSAA TSAC 30.0740 TNSM 31 44 20 TSAB 63 34 34.8 29.277
2-14
GPS 測量於 7 月份第一次登島實施測,架設兩組儀器皆使 用 Trimble ZEPHYR Geodetic Model 2 天線盤搭配 Trimble Net R9 接收儀,接收頻率包含 1、15、30 秒,三種同時分別記錄。 GPS 解算採用國際 GNSS 服務組織(International GNSS Service, IGS)提供精密星曆(Precise Ephemeris)進行解算。觀測時段如表 2-4 所示。 表 2-4 GPS 觀測時段表 觀測時間 測站 1 測站 2 東沙追蹤站 08:45 - 14:57 TSAA TSAC TNSM 15:23 - 21:27 TSAA TSAB TNSM 7 月份邊角測量、GPS 控制測量方法經平差後成果以及由 公告控制點坐標化算角度與邊長關係如表 2-5 及表 2-6。其中 邊角測量之平差採用 WolfPack 6.1.1 中最小二乘平差計算,由 9 個觀測量(3 邊+6 角)並固定 TNSM 站解算 3 個控制點平面坐標, 將所求平面坐標再化算各邊角關係;GPS 測量則直接由控制網 平差成果坐標化算邊角關係。 採用與前述相同方式進行平差,11 月份邊角測量之角度與 邊長成果與公告坐標化算成果比較如 表 2-7、表 2-8 所示,其中由不同觀測者測得邊角成果之 間相當接近,角度差異最大為 4”,控制點與天線盤間之距離亦 幾乎無差異,僅 TSAA-TSAB 具有 0.001m 差值。
2-15 表 2-5 邊角測量(07)與 GPS 控制測量與公告坐標化算角度成果 測站 觀站 邊角測量(07) GPS 控制測量 公告坐標(TWD97) 角度 ° ’ ” 角度 ° ’ ” 角度 ° ’ ” TSAB TSAA 0 0 0 0 0 0 0 0 0 TNSM 31 48 56 31 49 23 31 51 30 TSAC 59 27 35 59 27 33 59 27 57 TSAC TSAB 0 0 0 0 0 0 0 0 0 TNSM 26 32 21 26 32 07 26 29 54 TSAA 56 57 44 56 58 30 56 58 14 TSAA TSAC 0 0 0 0 0 0 0 0 0 TNSM 31 44 37 31 44 25 31 44 41 TSAB 63 34 41 63 33 57 63 33 49 表 2-6 邊角測量(07)與 GPS 控制測量與公告坐標化算邊長成果 起訖站別 邊角測量 GPS 控制測量 公告坐標(TWD97) 距離 (m) 距離 (m) 距離 (m) TSAB-TNSM 17.230 17.227 17.218 TSAB-TSAC 31.270 31.264 31.263 TSAC-TNSM 17.892 17.887 17.884 TSAC-TSAA 30.074 30.071 30.072 TSAA-TNSM 17.221 17.226 17.237 TSAA-TSAB 29.272 29.274 29.272 表 2-7 邊角測量(11)與公告坐標化算角度成果 測站 觀站 邊角測量(11)_1 邊角測量(11)_2 公告坐標(TWD97) 角度 ° ’ ” 角度 ° ’ ” 角度 ° ’ ” TSAB TSAA 0 0 0 0 0 0 0 0 0 TNSM 31 49 27 31 49 23 31 51 30 TSAC 59 27 30 59 27 27 59 27 57 TSAC TSAB 0 0 0 0 0 0 0 0 0 TNSM 26 32 08 26 32 10 26 29 54 TSAA 56 57 57 56 57 59 56 58 14 TSAA TSAC 0 0 0 0 0 0 0 0 0 TNSM 31 44 17 31 44 20 31 44 41
2-16 TSAB 63 34 33 63 34 33 63 33 49 表 2-8 邊角測量(11)與公告坐標化算邊長成果 起訖站別 邊角測量(11)_1 邊角測量(11)_2 公告坐標(TWD97) 距離 (m) 距離 (m) 距離 (m) TSAB-TNSM 17.232 17.232 17.218 TSAB-TSAC 31.272 31.272 31.263 TSAC-TNSM 17.890 17.890 17.884 TSAC-TSAA 30.075 30.075 30.072 TSAA-TNSM 17.225 17.225 17.237 TSAA-TSAB 29.275 29.276 29.272 7 月施測之兩種測量方法平差成果減去公告坐標,其差值 如表 2-9、表 2-10 所列。其中,三個副點間之相符度較副點與 TNSM 間為高,無論邊角測量或 GPS 控制測量均有此現象。 TNSM 與副點間方向夾角,與公告坐標反算結果差達 2’量級, 距離差值達公分量級。推論可能與民國 93 年 10 月 5 日更換天 線作業有關。 表 2-9 邊角測量(07)與 GPS 控制測量角度成果檢核 測站 觀站 邊角測量(07) -公告坐標(TWD97) GPS 控制測量 -公告坐標(TWD97) 角度 ° ’ ” 角度 ° ’ ” TSAB TSAA 0 0 0 0 0 0 TNSM 0 -2 34 0 -2 7 TSAC 0 0 -22 0 0 -24 TSAC TSAB 0 0 0 0 0 0 TNSM 0 2 27 0 2 13 TSAA 0 0 -30 0 0 16 TSAA TSAC 0 0 0 0 0 0 TNSM 0 0 -4 0 0 -16 TSAB 0 0 52 0 0 8
2-17 表 2-10 邊角測量(07)與 GPS 控制測量邊長成果檢核 11 月施測之邊角測量經平差之成果減去公告坐標化算邊角, 其差值如表 2-11 及表 2-12 所列。其結果與 7 月之邊角測量大 致相近相近,自 TSAB 與 TSAC 觀測 TNSM 之方向與公告坐標 反算結果均具有達 2’量級差異。 表 2-11 邊角測量(11)角度成果檢核 測站 觀站 邊角測量(11)_1 -公告坐標(TWD97) 邊角測量(11)_2 -公告坐標(TWD97) 角度 ° ’ ” 角度 ° ’ ” TSAB TSAA 0 0 0 0 0 0 TNSM 0 -2 3 0 -2 6 TSAC 0 0 -27 0 0 -30 TSAC TSAB 0 0 0 0 0 0 TNSM 0 2 14 0 2 16 TSAA 0 0 -17 0 0 -15 TSAA TSAC 0 0 0 0 0 0 TNSM 0 0 -24 0 0 -21 TSAB 0 0 44 0 0 44 起訖站別 邊角測量(07) -公告坐標(TWD97) GPS 控制測量 -公告坐標(TWD97) 距離 (m) 相對誤差 距離 (m) 相對誤差 TSAB-TNSM 0.012 6.97×10-4 0.009 5.23×10-4 TSAB-TSAC 0.007 2.24×10-4 0.001 3.20×10-5 TSAC-TNSM 0.008 4.47×10-4 0.003 1.68×10-4 TSAC-TSAA 0.002 6.65×10-5 -0.001 3.33×10-5 TSAA-TNSM -0.016 9.28×10-4 -0.011 6.38×10-4 TSAA-TSAB 0 0 0.002 6.83×10-5
2-18 表 2-12 邊角測量(11)邊長成果檢核 當以三個副點之公告坐標為固定,由 7 月施測 GPS 與全測 站所測邊角,分別計算 TNSM 坐標,其坐標成果與公告坐標間 之差異,以及坐標平差所得之坐標值標準誤差,如表 2-13a 所 示。而同樣將三副點公告坐標固定,11 月所施測兩組全測站邊 角測量所得 TNSM 坐標成果如表 2-13b,水平方向成果與 7 月 邊角測量相近。11 月份除了邊角測量外,另加入三角高程測量 之施測,其結果若以 TSAB 作為高程零點,則自 TSAA、TSAB 及 TSAC 所測得 TNSM 高程分別為 4.739m、4.739m 及 4.738m。 表 2-13b 中高度方向較差是由本案 7 月實測之 TSAB 橢球高加 上 由 三 角 高 程 測 量 所 得 副 點 所 測 得 與 TNSM 高 程 平 均 值 (4.739m),再減去公告 TNSM 橢球高而得,其值 35.57cm 主要 差異量應為三角高程測量為照準天線頂端,而公告坐標應為天 線相位為中心所致。 表 2-13a 7 月測量坐標誤差與較差(計算成果減公告,單位:公分) 邊角測量 GPS 坐標標準誤差 較差 坐標標準誤差 較差 N 0.001 0.73 0.01 0.37 E 0.001 -1.24 0.04 -1.19 H --- --- 0.07 6.54 起訖站別 邊角測量(11)_1 -公告坐標(TWD97) 邊角測量(11)_2 -公告坐標(TWD97) 距離 (m) 相對誤差 距離 (m) 相對誤差 TSAB-TNSM 0.014 8.13×10-4 0.014 8.13×10-4 TSAB-TSAC 0.009 2.88×10-4 0.009 2.88×10-4 TSAC-TNSM 0.006 3.35×10-4 0.006 3.35×10-4 TSAC-TSAA 0.003 9.98×10-5 0.003 9.98×10-5 TSAA-TNSM -0.012 6.96×10-4 -0.012 6.96×10-4 TSAA-TSAB 0.003 1.02×10-4 0.004 1.37×10-4
2-19 表 2-13b 11 月坐標誤差與較差(計算成果減公告,單位:公分) 邊角測量(11)_1 邊角測量(11)_2 坐標標準誤差 較差 坐標標準誤差 較差 N 0.005 0.77 0.012 0.77 E 0.005 -0.97 0.012 -1.01 H 0.058 35.57 0.058 35.57 除了觀測天線盤與控制點相對關係外,為了解天線盤與天 線柱是否傾斜,邊角測量照準天線盤中心時亦檢測天線盤中心 是否位於天線柱中心線上,以及觀測天線盤左右底端天頂角檢 視天線盤本身是否歪斜。 天線盤與天線柱中心關係僅以架設全測站經緯儀於 TSAB 點時觀測,由對準 TSAA 為水平角 0 度轉至照準天線盤頂端後, 固定水平角將天頂角轉至 90 度(即平視),正倒鏡進行獲得大致 重疊點標記於天線柱即獲得中心點。此時固定天頂角旋轉水平 角以觀測照準天線柱邊緣之水平角(圖 2-4),觀測結果如表 2-14。水平角以天線頂點為中心為基準,轉至平視後照準天線 柱左右邊緣夾角差值約24’,該差值可能來自於天線柱之施工誤 差。若假設天線柱本身形狀完全對稱且並未傾斜,則可能為天 線盤傾斜,或天線盤未置於天線柱正中心處。
2-20 圖 2-4 檢測天線中心是否位於天線柱中心線示意圖 表 2-14 天線盤與天線柱中心水平角 測站 測點 水平角 ° ’ ” 夾角 ° ’ ” TSAB 柱左側 30 38 11 1 10 50 TNSM 31 49 01 1 34 21 柱右側 33 23 22 天線盤本身傾斜之檢測係於三控制點架設全測站經緯儀, 並正倒鏡照準天線盤左右底分別量測天頂角成果如表 2-15,其 中自 TSAC 照準天線盤底其天頂角具有最顯著差異,達 1’28”, 而自 TSAA 點位觀測則無顯著差異,故推測天線盤具有大略向 TSAA 方向傾斜。
2-21 表 2-15 天線盤左右底分別量測天頂角成果 測站 天線盤 天頂角 ° ’ ” 角度差 ° ’ ” TSAB 左側 80 43 51 -0 0 9 右側 80 43 42 TSAC 左側 81 23 00 0 1 28 右側 81 24 28 TSAA 左側 82 01 59 0 0 1 右側 82 02 00 2-2-2 東沙衛星追蹤站整體評估 1. 站址地理環境勘查 東沙島上地表覆蓋以珊瑚礁風化後之珊瑚砂為主,屬於膠 結程度較低之地層,故就地質考量上本身並無具有絕佳條件之 站址。東沙追蹤站為於東沙島之東光牧場上,該處屬於人為活 動相對較為稀少處,除了接收站之儀器房外,周圍幾乎無易造 成多路徑效應之建物;而追蹤站天線之北側其週邊因林投樹與 銀合歡繁生,早年缺乏站址的清整而可能使天線盤之透空度受 影響,至內政部 100 年度「以透水光達測繪技術測製東沙地區 數值地形模型工作」中使用該追蹤站數據及其副點之外業測量 作業甫開始對追蹤站周圍環境進行維持。就追蹤站現況而言, 地質狀況是否影響追蹤站之穩固需要持續觀察,而周邊林木範 圍之擴增則必須控制並定期處理。
2-22 2. 基樁建造規格 東沙衛星追蹤站為依據內政部 87 年「應用全球定位系統實 施台閩地區基本控制測點測量計畫總報告」中所制訂規範進行 建置,天線柱使用混凝土圓錐柱體,並於天線柱基樁鄰近處設 置三副點作為穩定性檢測使用。比對前述章節中所整理國外各 單位衛星追蹤站建置規範,國內衛星追蹤站之基樁規格及要求 皆雷同。 3. 天線、接收儀及附屬感測器 東 沙 衛 星 追 蹤 站 使 用 天 線 盤 廠 牌 為 Topcon , 型 號 為 TPSCR3_GGD CONE,屬於抗波環圈類型天線,該類型天線亦 符 合 為 一 般 衛 星 追 蹤 站 要 求 , 而 對 應 之 接 收 儀 為 Topcon Odyssey-RS,可接收 L1、L2、C/A 及 P 之 GPS 衛星觀測量及 GLONASS 衛星觀測量,並同時觀測數量 10 顆以上之衛星訊號。 接收取樣間隔可達 20Hz,並提供多通道同時接收。目前東沙衛 星追蹤站並無其他附屬感測器。 4. 數據品質檢核 此項目屬於東沙衛星追蹤站建置規範項目中較不足之一環, 乃由於現今針對數據品質檢核並無切確之實施方法。參考國外 各單位之建置規範,此部分建議可使用 UNAVCO 所開發 TEQC 軟體作為此項目改進之實現方法。 5. 資料儲存及傳輸格式 目前東沙衛星追蹤站觀測數據儲存格式為壓縮檔,解壓縮 後即為 RINEX 之觀測檔(O 檔),接收檔案皆儲存於電腦硬碟中, 需經由追蹤站管理者定期將資料備份。資料傳輸目前亦未提供 以網路之方式,而是透過管理者備份攜出後交由管理機關。目
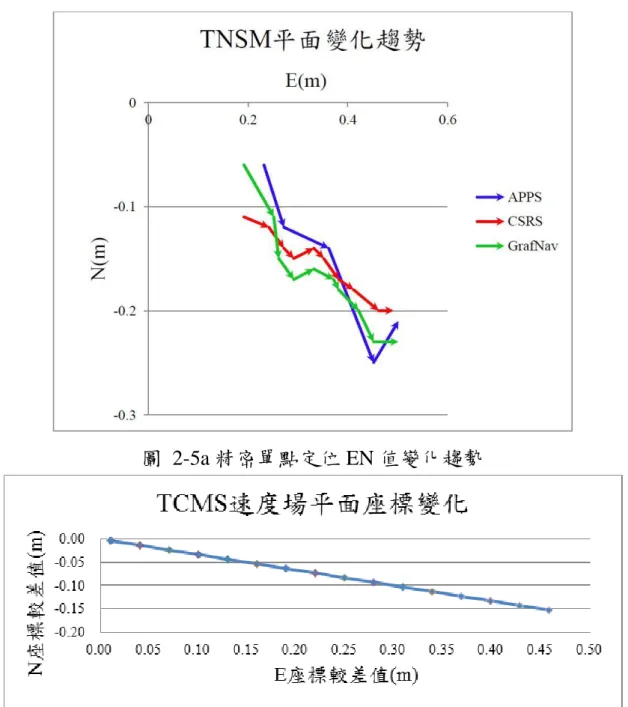
2-23 前數據傳輸方式與國外單位規範及內政部 87 年「應用全球定位 系統實施台閩地區基本控制測點測量計畫總報告」中所提出以 網路傳輸方式不同。 2-3 影響衛星追蹤站接收訊號及訊號品質因素及改善方法 為檢測追蹤站點位是否穩固,能長期提供可靠觀測資料,此部分 將解算追蹤站長時間序列坐標變化。本案已蒐集自 1995 年至今全天 候追蹤站觀測檔(O 檔),並以 GrafNav 軟體及 CSRS-PPP、APPS 自動 化服務系統進行精密單點定位解算。東沙衛星追蹤站 2001 年和 2002 年觀測檔匯入時顯示數據異常無法進行計算;1995 年至 2000 年間, IGS 未提供衛星時錶差檔案,無法進行精密單點定位計算。因此東沙 衛星追蹤站解算時間序列中僅包含 2003 年至 2012 年之解算成果。有 關 2001 年和 2002 年觀測檔問題,並未發現於陽明山(YMSM)等站資 料中,本校將持續探討,以排除問題。 選定 2003 年至 2012 年每年之 5 月 2 日觀測資料進行精密單點定 位解算,將各年份計算坐標值與 TNSM 公告之 TWD97(1997)公告坐 標相減,其 E、N 平面差值結果如圖 2-5a 與所示。近 10 年內 E 值大 致呈現逐年增加往之趨勢,至今年該差值已達約 0.5 公尺;解算 N 值 皆小於公告值且差值逐年遞增,目前差值約-0.20~-0.25 公尺之間,整 體往東南方向偏移;由臺灣其中一 IGS 站 TCMS 於 ITRF2008 框架下 自 1997 至 2012 年之點位坐標變化情形,其因速度場造成該點位位移 如圖 2-5b 所示,該速度場移動量趨勢與精密單點定位 EN 值變化一 致;而將精密單點定位坐標減去速度場移動量如圖 2-5c,各軟體解算 逐年坐標則無明顯朝一方向移動,故可判斷天線應無逐年偏移現象。 橢球高差值(圖 2-6)現除了 APPS 成果變化起伏較為劇烈,解算值幾 乎皆大於公告值,但其差值逐年減少。
2-24
圖 2-5a 精密單點定位 EN 值變化趨勢
2-25 圖 2-5c 精密單點定位扣除速度場移動量之 EN 值變化 圖 2-6 精密單點定位 h 值變化趨勢 表 2-16 為使用 TEQC 對內政部東沙(TNSM)、墾丁(KDNM)、北 港(PKGM)與陽明山(YMSM)四追蹤站 2012 年 1 月 1~7 日連續七日觀 測數據品質檢測成果,所列 MP1、MP2 與 o/slps 值為反映觀測環境 及數據品質之指標,其中 MP1 與 MP2 分別表示 L1、L2 載波上的多 路徑效應,單位為公尺(m);o/slps 指標為觀測資料筆數除以週波脫落 數目,無單位。MP1 與 MP2 以 KDNM 與 YMSM 略佳,約 0.4m,TNSM 則略高;o/slps 值以 PKGM 站成果較差,其值介於 2666~9846 間,其
2-26 餘 3 站每日成果除 KDNM 於 01 月 07 日為 5667 外,皆大於 10000。 TNSM 站除 01 月 02 日為 13965 較差,其他 6 日均大於 27000。 東沙衛星追蹤站數據品質良好,目前無需改善。後續研究建議可 分析在台灣設置之三個 IGS 觀測網中 GNSS 衛星追蹤站(TWTF、 TNML 及 TCMS)之訊號品質,以進一步評估比較。 表 2-16 追蹤站訊號品質檢測成果 TNSM KDNM PKGM YMSM 01/01 MP1(m) 0.45 0.37 0.65 0.38 MP2(m) 0.52 0.45 0.64 0.41 o/slps 27744 23514 2670 14372 01/02 MP1(m) 0.47 0.42 0.63 0.40 MP2(m) 0.54 0.44 0.63 0.45 o/slps 13965 23404 2666 28724 01/03 MP1(m) 0.46 0.41 0.67 0.38 MP2(m) 0.52 0.43 0.64 0.42 o/slps 27779 23389 2932 28785 01/04 MP1(m) 0.47 0.35 0.66 0.38 MP2(m) 0.53 0.39 0.63 0.41 o/slps 27995 23368 3674 28727 01/05 MP1(m) 0.44 0.39 0.65 0.40 MP2(m) 0.52 0.40 0.66 0.44 o/slps 27759 11741 5855 28779 01/06 MP1(m) 0.48 0.41 0.62 0.39 MP2(m) 0.53 0.42 0.62 0.42 o/slps 27944 15794 9846 19103 01/07 MP1(m) 0.44 0.40 0.63 0.40 MP2(m) 0.53 0.43 0.63 0.43 o/slps 27823 5667 4657 27520 2-4 適用我國之衛星追蹤站設站評估方式及接收設備檢校模式 內政部於民國 82 至 83 年陸續設置 8 個衛星追蹤站,提供全天候 接收衛星資訊之服務。此 8 個衛星追蹤站與國際衛星追蹤站聯測後解 算得其精確絕對坐標值,除可作為控制點測量之依據,更為我國現行 TWD97 測量基準框架建立依據,可見其穩固與否具有不可忽視之重 要性。此八個追蹤站有一十分重要之特色,即為三個副點之設置。本
2-27 案針對此一特色,試擬訂一套追蹤站天線偏移之檢校流程,期盼可作 為往後衛星追蹤站穩定性檢測之實行辦法,完整草案詳見附錄九。 2-5 東沙衛星追蹤站屋舍結構檢查與防水功能補強 東沙衛星追蹤站衛星接收房舍建築物因年久,屋頂版部分混凝土 剝落,產生鋼筋鏽蝕及外露之情況,為確保建築物無結構上之疑慮, 乃於進行房舍補強及防水工程前進行現況勘查。 本案於 101 年 6 月 5 日進行現況現地勘查,建築物天花板有混凝 土剝落之情形(照片 2-1)及因屋頂漏水造成天花板鋼架鏽蝕(照片 2-2)。現勘結果為建築物屋頂版部分混凝土剝落,鋼筋外露及鏽蝕之 情況,可能為混凝土中海砂造成,但其情況輕微,對結構安全應無立 即之危險,其短期內(5~10 年)不會有結構不安全之情形發生。建築物 現有之漏水問題,可在屋頂做防水處理之施工,即可改善。7 月間於 東沙進行測量作業時,追蹤站屋頂板混凝土剝落情況加劇,進入房舍 易被混凝土塊砸到(照片 2-3 及照片 2-4),本次取回掉落之混凝土塊 進行氯離子檢驗,氯離子高達 1.442 kg/m3(圖 2-7),較規範值 0.3 kg/m3超標近 5 倍,而且部分樣本中可見貝類殘骸,確認為海砂造成 之問題。 照片 2-1 建築物天花板混凝土剝落情形(6/5/2012)
2-28
照片 2-2 建築物天花板漏水及鋼架鏽蝕情形(6/5/2012)
照片 2-3 建築物天花板漏水及鋼架鏽蝕情形(7/19/2012)
2-29 圖 2-7 東沙混凝土氯離子檢驗報告 本案於 10 月 25 日至 11 月 1 日進行施工,施工情形如表 2-17 所示,施工項目如下: 1、屋頂防水工程 (1)樓層舊有防水漆拋除 (2)樓層平面清除及水泥補平 (3)防水底漆施工 (4)漆製控制點對空標 2、油漆補強工程 (1)天花板輕鋼架拆除及水泥補平缺口 (2)天花板龜裂水泥補平 (3)牆壁壁癌處理及水泥補平 (4)天花板及牆壁油漆
2-30
3-1
3
第参章 離島地區高程基準分析
高程基準 (vertical datum) 是陸地上高程測量之依據,理論上可用大地 水準面或是橢球面為基準,實際上可用單個潮位站上的長期平均海水面, 也可以用多個潮位站之長期平均海水面作為基準(Rapp and Balasubramanis, 1992)。 高程基準之穩定與否深切影響國家高程系統建立,無論正高計算或潮 位高計算,均需倚賴精確之高程基準。2001 臺灣地區高程基準(TWVD2001), 係參考基隆港之基隆潮位站長期潮位觀測資料建立。為能準確的確定潮位 資料,除潮位儀本身的準確度外,尚須確保潮位站的穩固,以排除潮位站 的沉陷因素,所以必須長期與定期檢測,以暸解潮位站之穩定性。各離島 之高程基準則因海域阻隔,未能採用和臺灣本島相同之高程基準,各離島 高程起算點須以各離島潮位站觀測資料推算之平均海水面作為基準,獲得 各自獨立之區域性高程系統成果。 在內政部 100 年「以透水光達測繪技術測製東沙地區數值地形模型工 作」一案中,為以橢球高為高程基準所求得海底地形,在重疊區不同航帶 間其差異均符合 IHO-1b 規範;而以潮位為高程基準化算後,透水光達掃描 航帶之間則有較明顯高度差異,推測為掃描航帶間時間差異對應的潮位改 變所致,如潮位站與測量點間海水面有潮位與潮時差異之現象。而在開放 海域中設置潮位站,具有相當大之難度。因此,本案擬由測深光達作業平 行航帶與交叉航帶間之重疊區,藉由其潮位高之差異量,以迴歸分析方式, 降低重疊區潮位高之差異量,並由此探討建立東沙島潮位模型之可行性。 前述成果已完成東沙控制點位沉陷測量,本項工作接續前述成果,持續檢 驗監測東沙控制點位(含東沙潮位站)是否發生沉陷,以確保潮位資料品質。
3-2 3-1 國內外水深測量技術及潮位高計算模型 4 傳統之水深測量,其基準由潮位訂定。在載具上測量時,僅需獲得 平面位置與瞬時水深,再以岸際潮位觀測之水面變化,並假定觀測點之水 面高程,在該觀測瞬時與岸際潮位站者相同,因而求得測量點之水底地形 高程。若採用不同潮位系統(如中潮位或最低低潮位)為基準,則可獲得對應 於不同潮位系統之水底地形。 5 應用「測量高程現代化」作業觀念,測量海底地形時可以直接測定測 量點載具上觀測儀器參考零點之三維坐標。如以 GNSS 進行定位測量,所 獲得的高程即為橢球高。因此,由觀測儀器參考零點之橢球高,結合所測 水深,即可獲得水底地形高程值,並不需要潮位資料,但是其高程系統為 橢球高。若需化算為以潮位為高程基準時,亦需要潮位模型。若在小區域, 常常僅使用單一潮位站進行潮位修正,但若在大區域,則需配合當地之潮 位模型為宜。 6 依據潮汐觀測資料可以計算得到各種不同統計意義或物理意義之海水 面基準,例如:平均海水面、平均高潮位面、平均低潮位面、最低低潮位 面等。內政部近年所執行之平均海水面各式計算方法如圖 3-1 所示。第(一) 種方法最為簡單,不進行任何修正後直接求取平均海水面,估計之成果誤 差最大。第(二)種方式為內政部 92 年所採用的方式,將潮位觀測資料缺失 部分以補遺方式補足,估計其平均海水面,避免缺失之資料集中於高潮或 低潮時期,所估計的平均海水面有所偏差(內政部,92)。第(三)種方式為內 政部 87 年計算基隆平均海水面時即採用,以多變數迴歸法的方式去除潮汐 資料中的天文潮汐與氣象的影響量,估計其平均海水面,此一方法最大的 缺失在於其對天文潮的估計準確性不高,以致影響最終的成果(內政部國土 測繪中心,95b)。第(四)種方式為內政部國土測繪中心 94 年採用,以調和 分析方法去除潮汐資料中的天文潮汐,估計其平均海水面。
3-3
7 內政部國土測繪中心(95b)整理美國、非洲、加拿大、西歐、北歐、
地中海南歐、英國及紐西蘭等國家所採用之垂直坐標基準:
8 『美國自 1920 年代起便設置了大地測量的參考原點(National Geodetic Vertical Datum of 1929, NGVD29)沿用至今,復於 1988 年由 FEMA (Federal Emergency Management Agency)及 NFIP (National Flood Insurance Program) 研究後提出新的製圖垂直坐標基準(North American Vertical Datum of 1988, NAVD88)。由 NAVD88 所定義的參考原點中,不僅由潮位站提供平均海水 面的資料,同時該系統並利用 11 個不同的海洋與氣象觀測站每 6 分鐘的紀 錄,考慮了風向與風速、水流的速度與方向、空氣與水的溫度以及氣壓所 造成的影響,並針對以上的各種影響海水面高度的因素進行修正(FEMA, 2003; Zilkoski et al., 1992; Henning et al., 1998)。
9 地處穩定板塊地區的非洲,於 2001 年由非洲沿海的數個國家開始組成
一個跨國的海水面高程研究機構(Ocean Data and Information Network for Africa, ODINAFRICA),主要利用雷達波測距方式,藉由波行進的時間與波 速之關係,修正海水面高度、空氣與水的溫度、海水的鹽度、水流及風的 方向與速度等因素,得到潮位高(Odido, 2003)。另外 ODINAFRICA 亦利用 水下壓力式感測器做雷達波測距第二重的資料驗證,以及高頻率的資料採 樣數,得到較佳的資料品質(Aman et al., 2006)。在最新 ODINAFRICA-Ⅲ中, 加入了衛星的觀測結果。
10 與美國同樣位於北美地區的加拿大則與西歐、北歐及地中海南歐等國
加入了北大西洋的跨國研究機構(European-North Atlantic Mean Sea Level Program, EMSLP)。該機構利用水下壓力式的計測儀測量在每一天當中由各 個潮位站所提供的平均壓力值,並考慮了大氣內部重力波、熱能的傳遞與 太陽輻射的吸收對地表所造成之影響(Ansell et al., 2006)。其所採用之模式 與美國相較多偏重於溫度對於空氣、水體與地面所造成的影響程度。
3-4 11 位於西歐的英國發展出一套符合當地的平均海水面研究方法(IOC, 1985; IOC, 2002)。英國的潮位站主要採用氣泡式的水下壓力計測儀來測量海水面 的平均高度,利用氣泡由水底往水面移動的時間計算壓力差,再換算為計 算海水面的高度。並且據此開發出一種具有一組三個壓力傳感器與三個壓 力表壓力計測儀,該儀器不僅可以提供更精確的基準面控制,以及區域性 低潮位面的數據研究。』 12 圖 3-1 各式計算平均海水面之流程示意圖(內政部國土測繪中心,95b)
3-5 3-2 東沙地區潮位數據 持續進行長期性潮位觀測,為建立參考高程基準之必需條件。由美國 陸軍工兵署之作業規範中指出,可分別於不同地區設立長期(主要)、中期(次 級)與短期(第三級)之潮位站,其中長期(主要)控制潮位站為一至少需要 19 年週期之連續潮位觀測站,主要可利用其潮汐資料計算調和分析常數,以 供潮汐預報及基準面推算之用。中期(次級)控制潮位站為一觀測時間可以少 於 19 年,但必須大於 1 年以上週期之潮位站,以提供 365 天海平面季節變 化之調和分析使用。短期(第三級)潮位站則為觀測時間少於 1 年,但至少有 30 天週期之潮位站,其主要在於提供 29 天之調和分析常數。 本案目前進行之分析項目如下: 1. 以統計方法計算潮位站之平均潮差及平均高潮間隙。 2. 利用調和分析法,將觀測資料之潮汐訊號解析出來,獲得不同分潮 的振幅及相位延遲。 3. 利用調和分析後所獲得之 68 個主要分潮,繪製潮位站之潮位振幅 及相位角。 4. 用實測資料進行潮位預報,並與實測資料進行繪製比較。 本案分析之資料均以當地(臺灣)時間表示,即為 GMT+8 小時。以下就 連續式潮位計(Druck PTX1830)進行數據分析。 資料收集起時間為民國 100 年 6 月 1 日 8 時 0 分至 101 年 10 月 23 日 14 時 24 分,共計 511 天。本分析數據採用每 6 分鐘潮位資料,即為每 10 秒取樣 1 次,每 6 分鐘之 36 筆取樣資料平均值。經上述 t_tide 調和分析及 公式計算後,得主要分潮平均潮位差為 0.2909 公尺,潮時差約為 8.6838 小 時,各主要分潮參數及研究過程詳如附錄四。
3-6 3-3 潮位基準面高程探討 本案利用民國 100 年 6 月 1 日 8 時至 101 年 10 月 23 日 14 時 24 分, 共計 511 天之潮位數據,進行以下之數據分析及推算。 1 3-3-1 平均海水面(MSL) 大地測量對平均海水面之定義為「若於海岸選擇適當地點,長期 觀測水位之升降,實施所謂驗潮工作,取得月球之黃交點周期(約十 九年期)之驗潮結果,求出潮位站處之平均位置」(聯勤測量署,1978;
Gill and Schultz, 2001; Torge, 2001)。參考 NOAA 對於平均海水面 (Mean Sea Level)之定義,特定時段內之平均海水面為觀測逐時潮位之 算術平均,如月平均海水面及年平均海水面。以東沙基準點引測得潮 位站感測器設施上參考點高程 1.296m,表 3-1 列出為以該參考點高程 為基準計算所得之月平均海水面及年平均海水面,其中 100 年 10 月因 接收數據中斷造成資料缺漏過多,因此未納入月平均海水面之計算中。 計算所得年平均海水面為 0.0037m,故而依此論證,現有平均海水面 之高程基準並無修正必要。 此外,也以調和分析計算平均海水面,將此段潮位數據經 t_tide 調合分析程式計算後,由 68 個主要分潮重組潮位,得平均海水面為 -0.015m。
3-7 表 3-1 平均海水面之計算 資料計算時間 月平均海水面 (m) 年平均海水面 (m) 開始 結束 2011/06/01 08:00 2011/06/30 23:54 -0.0945 0.0037 2011/07/01 00:00 2011/07/31 23:54 0.1459 2011/08/01 00:00 2011/08/31 23:54 0.1861 2011/09/01 00:00 2011/09/30 23:54 0.1305 2011/11/19 08:00 2011/11/30 23:54 -0.0786 2011/12/01 00:00 2011/12/31 23:54 -0.0938 2012/01/01 00:00 2012/01/31 23:54 -0.1264 2012/02/01 00:00 2012/02/29 23:54 0.0575 2012/03/01 00:00 2012/03/31 23:54 -0.0283 2012/04/01 00:00 2012/04/30 23:54 -0.0724 2012/05/01 00:00 2012/05/31 23:54 0.0203 2012/06/01 00:00 2012/06/30 23:54 0.0208 2012/07/01 00:00 2012/07/31 23:54 -0.0278 2012/08/01 00:00 2012/08/31 23:54 0.0075 2012/09/01 00:00 2012/09/30 23:54 -0.0137 2012/10/01 00:00 2012/10/23 14:24 0.0266 ※潮位站參考高程:1.296m 2 3-3-2 平均低低潮位面(MLLW)
參考 NOAA 對於平均低低潮位面(Mean Lower Low Water,簡稱 MLLW)之定義,是以 19 年為周期中每一潮汐天的較低低潮之平均高 度,此為統計值,若以本計畫目前所蒐集得 511 天之潮位數值統計, 求得 511 天之平均低低潮位面為-0.3861 公尺。 3 3-3-3 最低低潮位面(D.L.) 潮位依應用目的而有不同基準系統建立,海岸結構物多採潮位基 準與大地高程之正高相對應,故多採用中潮系統表示,以平均水位為 零點。對航運而言,需確定船舶通行所需最小水深,故海圖中對於港 口水深的基準面(Datum Level, D.L.)的表示,是以該地長年統計之平均 海水位減去四個主要分潮之半潮差,即為 M2+ S2+ K1+ O1振幅之水位
3-8 為準,此值與最低低潮位約略相等,稱為低潮系統。 4 Z0=Z-(Hm+Hs+H’+Ho) 5 Z0:水深基準面高 6 Z:平均水面高 7 其他符號分別如表 3-2 所示 表 3-2 分潮名稱 分潮名稱 分潮符號 半潮差符號 週期(hr) 主太陰半日潮 M2 Hm 12.42 主太陽半日潮 S2 Hs 12.00 主太陰全日潮 K1 Ho 23.93 主太陽全日潮 O1 H’ 25.82 以計算平均方式可以獲得平均海水面為-0.015m,加上由附錄四所 附 之 主 要 分 潮 表 得 M2=0.1455m 、 S2=0.0488m 、 K1=0.2795m 、 O1=0.2445m,故最低低潮位面約為-0.015m-0.7183=-0.7198 公尺。 8 3-3-4 最低天文潮位面(LAT) 內政部國土測繪中心(2010b)於「水深測量技術發展先期研究」提 及,針對在海圖服務必須顧及船隻航行安全之重要考量下,海圖所採 行之深度基準面,就須要求其應定義在當地平均潮位面之下,且瞬時 海水面應很少低於該面。為達此一標準,海圖基準將可採用較新型之 最低天文潮位面(Lowest Astronomical Tide, LAT),或是相當於 LAT 之 約最低低潮位面(我國現行之海圖基準),且應以 LAT 為長期目標。 目前已有英國、加拿大、澳洲等國採用 LAT 作為國家海圖的水深參考 基準。LAT 為最低之理論潮位面,其可使所有的潮汐高度為零值(含) 以上之正值,可避免模糊值的產生以明確定義高度之狀態符號。因 LAT
3-9 的計算僅考量平均氣象條件,以及地球、月球及太陽之間交互引力的 作用,故一般僅會在特定氣象因素的作用下(如高壓系統等),才會出 現比它更低之潮位面,也因此採用 LAT 作為水深基準時,所測製之海 圖將可在航行安全性上,具有最大的優勢。 根據余杏儒等人(2010)於「臺灣海域最低天文潮位面之推算」中亦 指出,目前臺灣所發行之海圖多採用平均海面下之水深約最低低潮位 (the Approximate Level of Lowest Low Water)做為水深參考基準(任, 2006)。然而,國際海測組織(International Hydrographic Organization, IHO)自 1995 年開始推廣海圖水深參考基準使用最低天文潮位面 (Lowest Astronomical Tide, LAT)之概念(張等,2009)後,目前歐洲、澳 洲等國家已將最低天文潮位面作為國家海圖的水深參考基準。又於 IHO 之海圖規範 M-4(Regulations of the IHO for International Charts and Chart Specifications of the IHO, Edition 3.003, August 2006)中提及,海 圖基準應採用最低天文潮位面,或是盡可能相當於最低天文潮位面的 約最低低潮位面,且應以最低天文潮位面為長期目標。 最低天文潮位面之定義為在一般氣象條件下,可預報出的最低潮位面 (CIRIA, 1996)。本案計算最低天文潮位面的方法為,藉由至少為期一 年的實測潮位資料進行調和分析(Harmonic Analysis),利用推算出來的 調和常數預報 18.6 年以上的天文潮水位,此水位資料裡的最低值即為 當地的最低天文潮。由於典型潮汐的周期為 18.6 年,而上一個周期處 於 1979 至 2000 年之間(蕭,2002),故本計畫利用蒐集之實測潮位資 料進行 1979 年至 2000 年之預報,期間之最低值即最低天文潮位面為 -0.8543 公尺。
3-10 3-4 潮位模型推估及海床地形潮位高 首先以統計方法計算潮位站之平均潮差及平均高潮間隙。利用調和分 析法,將觀測資料之潮汐訊號解析出來,可獲得不同分潮的振幅及相位延 遲。利用調和分析後所獲得之主要分潮,繪製潮位站之潮位振幅及相位角, 求得平均海平面。 內政部 100 年「以透水光達測繪技術測製東沙地區數值地形模型工作」 成果中,使用透水光達資料產製東沙地區潮位高模型時,重疊區域具有相 當顯著高差,可能是由於東沙環礁測區內皆是來自單一潮位計獲得之潮位 值,而實際上同一潮汐對於不同地方的影響時間及量值皆可能不同,即潮 時與潮差可能不同。以圖 3-2 為例,潮汐隨時間推移,故同一潮汐於不同地 點作用時間不同,即為潮時;同一潮汐振幅因地而異則為潮差。 圖 3-2 潮時與潮差示意圖 以潮位高為基準之海底地形高程或水深,即假定同一時間潮位站與測 量點位之海水面相同(如圖 3-3),如時間 t 以潮位高為基準之水深即