報告題名:
微型電磁塔吊夾娃娃機
The Design and Implementation of a Scaled-down Tower Crane
作者:陳健庭、許又杰、陳彥儒、劉昭逸、劉興祐 系級:電機工程學系 四乙、二乙 學號:D0140280、D0345718、D0383323、D0345161、D0345735 開課老師:何子儀 課程名稱:微處理機系統實習 開課系所:電機工程學系 開課學年: 104 學年度 第 2 學期
微型電磁塔吊夾娃娃機 i 逢甲大學學生報告 ePaper(2016 年)
中文摘要
本專題的目的為製做一個類似於夾娃娃機取物功能的機構,並在 過程中結合跨領域知識來完成此作品。本題目使用了精確規格的機械 部件搭配 3D 列印製成之零件為機構,以確保操作時的精準度及流暢 度;並自行設計驅動電路來驅動步進馬達使機構運作,如此整合製做 出一個類似於塔吊的單懸臂取物機構。 此機構使用 8051 單晶片微控制器,透過驅動電路驅動三顆步進 馬達,各別控制懸臂的左右旋轉、電磁鐵的前後及上下移動;並使用 連座的線性軸承來帶動電磁鐵的移動,以使之到達準確位置來吸取物 品,達成機構在特定空間內抓取物品並放置到目的地位置的功能。未 來亦希望能延伸應用此機構在機械手臂及其他需要精密操控的儀器 中。 關鍵字: 8051 單晶片微控制器、步進馬達、塔吊、電磁鐵、驅動電路。ii 逢甲大學學生報告 ePaper(2016 年)
Abstract
The aim of this project is to design and implement a scaled-down tower crane that can grab and move objects to the specific destination. In order to ensure the accuracy and freedom of operating mechanism, most of mechanical parts are made in accurate specification and combined with parts made by 3D printer to assemble the mechanism. In addition, a stepper motor driver is designed and implemented in this project. By integrating these materials and techniques, a mechanism which possesses the functions of a tower crane is completed.
In this project, an 8051 single-chip microcontroller is employed to drive three stepper motors to fulfilled the functions of hoist, crane and claw. The stepper motors control the movement of the electromagnet arm (back and forward, left and right, up and down), and use the linear bearings with dock to help driving the electromagnet, in such a way to move objects accurately within the specific area. In future, we hope the method and the concept of this project can be used in mechanical arms or mechanical equipments that need precise operation.
Keyword:
微型電磁塔吊夾娃娃機 iii 逢甲大學學生報告 ePaper(2016 年)
目次
中文摘要 ... i Abstract ... ii 目次 ... iii 第一章 緒論... 1 第二章 系統架構 ... 2 第三章 系統功能 ... 17 第四章 實驗結果與操作說明 ... 19 第五章 結論與未來展望 ... 23 第六章 組員工作劃分 ... 28 第七章 工作日誌 ... 29 第八章 組員心得 ... 30 附錄 ... 34 參考文獻 ... 401 逢甲大學學生報告 ePaper(2016 年)
第一章 緒論
1.1 研究動機 組員們在看到夾娃娃機的運作時皆覺得是個很好的取物機構,但 因常見的夾娃娃機的架構所占的體積較大,機構設計也較繁瑣,我們 便希望能用新的方法製做出一個具有取物功能的機構。同時也希望在 過程中能夠能學習到機械工程相關的概念和步進馬達的知識。 1.2 研究目標 在題目的設計過程中,我們以興建大樓時建築業所使用的塔吊的 運作機制為構想,希望能夠延伸此架構來完成一個兼具完整性、操作 流暢性及精準度的作品,使機構能夠靈活操作並抓取物品。未來亦希 望能延伸應用此機構在機械手臂或其他需要精密操控的儀器中。微型電磁塔吊夾娃娃機 2 逢甲大學學生報告 ePaper(2016 年)
第二章 系統架構
本機構的功能主要為,讓電磁鐵移動到物體位置後,啟動電磁鐵 吸取物品,再將物品移動到欲放置的位置。圖 2.1 為此機構的系統架 構概觀。操作方式是由按鈕來控制,讓 8051 發送控制訊號給驅動電 路,再驅動馬達並帶動各機械部件運作,達成電磁鐵的移動功能;而 吸取物品所用的電磁鐵,亦由 8051 送出操控訊號來吸取物品。 圖 2.1 微型電磁塔吊夾娃娃機之系統架構概觀 2.1 硬體架構 本專題設計之硬體架構主要包含按鈕、AT89S52、馬達驅動電路、 步進馬達及電磁鐵。 其中個別元件的主要功能為: (1)按鈕:共有七個按鈕,分別為前後左右上下等六個方向紐,及一 個啟動電磁鐵吸取物品的按鈕。其功能為輸入操作的訊號給3 逢甲大學學生報告 ePaper(2016 年) AT89S52。 (2)AT89S52:判斷按鈕訊號,傳輸指令給馬達驅動電路或電磁鐵。 (3)馬達驅動電路:接收 AT89S52 指令後,供給足夠之電壓及電流使 馬達轉動。因為會用到三顆馬達,所以會有三個驅動電路。 (4)步進馬達:使用到三顆馬達,分別帶動電磁鐵來做前後、左右及 上下移動。 (5)電磁鐵:接收 AT89S52 指令,功能為吸取物品。 以上由各硬體所組成之架構圖見圖 2.2。 圖 2.2 塔吊夾娃娃機硬體功能架構圖 左轉 按鈕 右轉 按鈕 前進 按鈕 後退 按鈕 上升 按鈕 下降 按鈕 吸取 按鈕 AT89S52 控制電磁鐵 上下移動之 馬達 控制電磁鐵 前後移動之 馬達 驅動電路 驅動電路 驅動電路 控制電磁鐵 左右移動之 馬達 吸取物 品之電 磁鐵
微型電磁塔吊夾娃娃機 4 逢甲大學學生報告 ePaper(2016 年) 接著以下為各個硬體元件之說明: 2.1.1 AT89S52 單晶片微控制器 AT89S52 是一種 8 位元的單晶片微控制器。整個架構依賴系統內 部的時脈信號,用來產生各種動作週期及同步信號[1]。電路示意圖 見圖 2.3,接腳功能表見表 2.1[2]。 圖 2.3 AT89S52 單晶片微控制器 電路示意圖 表 2.1 AT89S52 之接腳功能表 腳位 接腳名稱 功能簡介 1~8 P1.0~P1.7 Port1 是一個具有內部提升電阻的 8 位雙 向 I/O 埠,Port1 能驅動 4 個 TTL 。每隻 腳均可當成輸入腳與輸出腳。若某接腳欲
5 逢甲大學學生報告 ePaper(2016 年) 當作輸入腳用,則必須先將 1 寫入這隻接 腳。 9 RESET 複位輸入。當振蕩器運作時,RST 引腳出 現兩個機械周期以上高電平將是單片機複 位 10~17 P3.0~P3.7 Port3 是一個具有內部提升電阻的 8 位雙 向 I/O 埠,Port3 能驅動 4 個 TTL 。每隻 腳均可當成輸入腳與輸出腳。若某接腳欲 當作輸入腳用,則必須先將 1 寫入這隻接 腳。 18、19 XTAL1、XTL2 XTAL1:振蕩器反相放大器的輸入端。 XTAL2:振蕩器反相放大器的輸出端。 20 VSS 系統接地 21~28 P2.0~P2.7 Port2 是一個具有內部提升電阻的 8 位雙 向 I/O 埠,Port2 能驅動 4 個 TTL 。每隻 腳均可當成輸入腳與輸出腳。若某接腳欲 當作輸入腳用,則必須先將 1 寫入這隻接 腳。 31 /VPP 欲使 CPU 讀取外部程式記憶體(地址為 0000H-FFFFH),EA 端必須保持接地。 32~39 P0.0~P0.7 Port0 是一個 8 位開汲極的雙向 I/O 埠。作 為輸出口,每位能驅動 8 個 TTL。接角 P0.0~P0.7 均為開汲極(open drain)結構,沒 有內部提升電阻器。若欲輸出 Hi 或 Low 之電壓,則必須自己在接腳接上外部提升 電阻器(external pullup)。每隻腳均可當成輸 入腳與輸出腳。若某接腳欲當作輸入腳 用,則必須先將 1 寫入這隻接腳。 40 VCC 正電源輸入腳,接+5V
微型電磁塔吊夾娃娃機 6 逢甲大學學生報告 ePaper(2016 年) 2.1.2 按鈕 按鈕,是一種電閘(switch,或稱開關),也稱為按鍵,用來控制機 械或程式的某些功能。一般來說,紅色按鈕是用來停止某一功能,而 綠色按鈕則是開始某一功能。按鈕的形狀通常是圓形或方形。 2.1.3 馬達驅動模組 由組員劉昭逸同學設計的馬達驅動電路,是由四個 2N2222、四 個 MJE2995T 電晶體、兩個 1mH 電感、和一個 NOT 閘組成。電路圖 見圖 2.4。 圖 2.4 馬達驅動電路圖
7 逢甲大學學生報告 ePaper(2016 年) 2.1.4 步進馬達 步進馬達(Stepper motor)是直流無刷馬達的一種,具齒輪狀的定子 和轉子,藉切換流向定子線圈中的電流,以一定的角度逐步轉動的馬 達。 步進馬達的特徵是採用開迴路控制(Open-loop control)處理,因為 切換電流觸發器的是脈波信號,所以步進馬達可正確的依比例追隨脈 波信號而轉動,達成精確的位置和速度控制,且穩定性佳。 本專題使用的步進馬達規格如下: 馬達型號:42 型 L40 步進馬達 主體直徑:4 cm 靜力矩:40 g• 動力矩:54 g• 輸入電流:1.7 A 步角:1.8 度 實體圖見圖 2.5。
微型電磁塔吊夾娃娃機
8 逢甲大學學生報告 ePaper(2016 年)
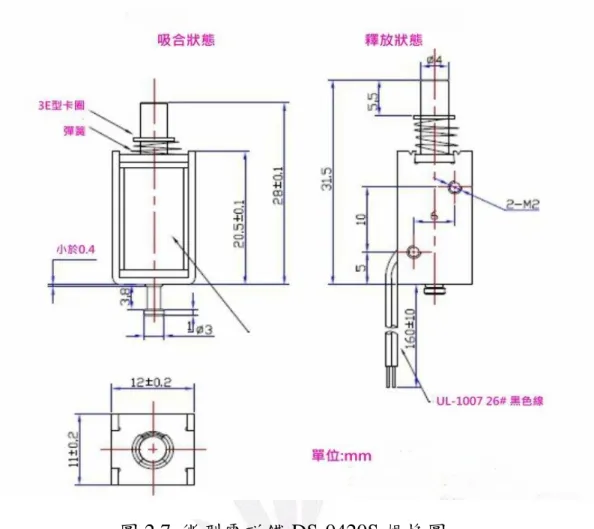
9 逢甲大學學生報告 ePaper(2016 年) 2.1.5 電磁鐵 電磁鐵型號:微型電磁鐵 DS-0420S 電壓:DC5V (10V) 電流:0.83A 尺寸:11*12*21mm(總長 33mm) 吸力:30g 行程:4mm 實體圖及規格圖,見圖 2.6 及圖 2.7。 圖 2.6 微型電磁鐵 DS-0420S 實體圖。
微型電磁塔吊夾娃娃機
10 逢甲大學學生報告 ePaper(2016 年)
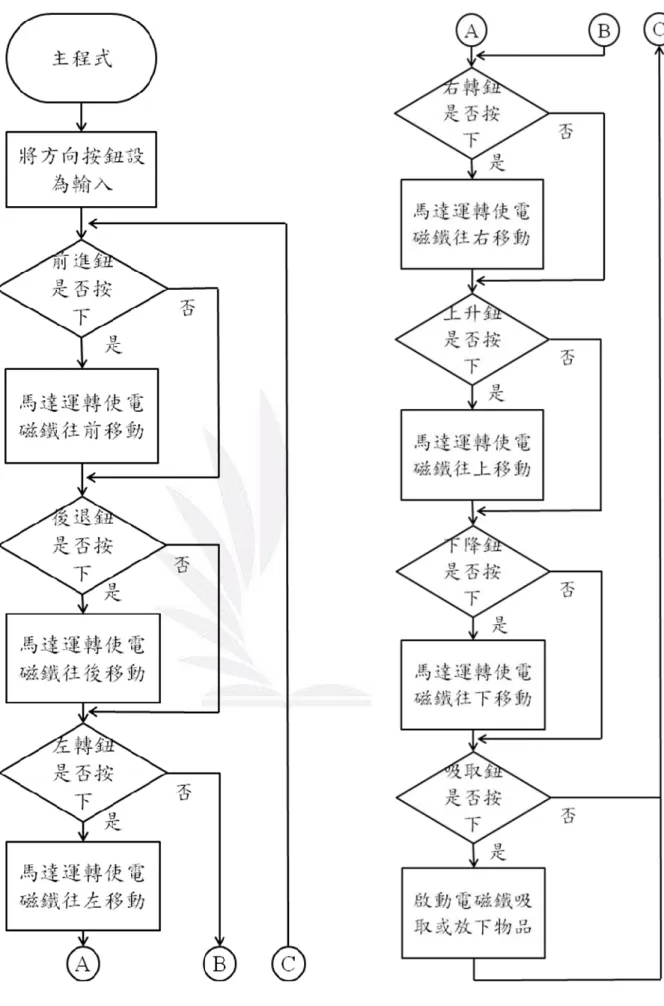
11 逢甲大學學生報告 ePaper(2016 年) 2.3 軟體架構 要操控整個機構,便需由程式來完成。而主程式便是一個完整的 控制架構,搭配上各個副程式的功能,讓機構能夠有條理的順利運 作。本專題設計之軟體流程有 (1)主程式 (2)馬達驅動副程式(3)電磁 鐵副程式。接下來將一一做介紹。 2.3.1 主程式 主程式的運作:首先設定各個方向按鈕為輸入,並且偵測各個按 鈕是否被按下;當有方向鈕被按下時,所對應的馬達便會運轉,帶動 電磁鐵朝向該方向移動;而當電磁鐵的吸取按鈕被按下時,電磁鐵便 會吸取或是放下物品。當動作完畢放開按鈕後,程式便會繼續維持等 待及偵測的狀態,不會有動作,直到下一個按鈕被按下才會繼續下一 個動作。主程式流程圖見圖 2.8。程式碼詳見附錄 A。
微型電磁塔吊夾娃娃機
12 逢甲大學學生報告 ePaper(2016 年) .
13 逢甲大學學生報告 ePaper(2016 年) 2.3.2 馬達驅動副程式 當按下按鈕就會從主程式向量表跳至操縱馬達的副程式,由於我 們所使用的步進馬達是用四個信號去驅動,驅動信號可以參考下表: 表 2.2 驅動信號對照表 A B A B 1 1 0 0 0 1 1 0 0 0 1 1 1 0 0 1 上表的每一列為一步,會因為信號方向而改變轉動方向,詳細的 轉動方式可見圖 2.9 [3]: 圖 2.9 步進馬達轉動方式 到副程式時,如果程式是使用 RL 或 RR 指令的話要先有初始信
微型電磁塔吊夾娃娃機 14 逢甲大學學生報告 ePaper(2016 年) 號。 在控制機構左右旋轉時,使用 RL 與 RR 指令操控馬達轉動方向。 我們直接使用整個 P1 信號左旋與右旋來操控馬達。 在控制部件前後移動時,上面兩顆馬達信號輸出都在 P2,兩顆馬 達要同時驅動,不然電磁鐵會無法維持在相同高度。 在操控部件上下移動時,由於 P2 上有兩顆馬達,所以使用了 CLR 與 SETB 來直接操控四個腳位的信號輸出;如果持續按著相同方向, 信號會接連著輸出,直到放開按鈕為止。按鈕放開後,會輸出一個相 同的信號持續一段時間,這是為了抵銷系統轉動的動能,達到更精密 的操控。操控結束後再回復初始值。 電磁鐵則是接在 P3.0。當按下按鈕後,會用 JNB 在程式前端迴圈, 直到手放開,接下來會對 P3.0 進行 CPL(0 ->1 , 1 -> 0)。馬達副程式 流程圖見圖 2.10。
15 逢甲大學學生報告 ePaper(2016 年) 圖 2.10 馬達副程式流程圖 馬達副程式開始 持續輸出信號,馬達 持續運轉 移動完畢,放開按鈕 馬達停止運轉,回復 PORT 初始值 跳回主程式
微型電磁塔吊夾娃娃機 16 逢甲大學學生報告 ePaper(2016 年) 2.2.3 電磁鐵副程式 電磁鐵所使用的指令為 CPL。其效果為:若電磁鐵在未啟動時, 我們按下吸取按鈕,電磁鐵便會通電並吸取物品;而若在電磁鐵吸取 物品時的狀態再次按下按鈕,電磁鐵就會斷電並放下物品。其流程圖 如圖 2.11。 圖 2.11 電磁鐵副程式流程圖 按鈕按下 電磁鐵吸取或 放下物品 電磁鐵副程式 開始 跳回主程式
17 逢甲大學學生報告 ePaper(2016 年)
第三章 系統功能
3.1 功能列表 接下來為此機構的各個功能做說明: 1. 左右轉動:驅動底端步進馬達,帶動光軸轉動整個上部機構。 (藍色箭 頭)。 2. 前後移動:驅動頂端步進馬達,帶動履帶及固定在履帶上的 線性軸承基座,達成前後移動之效果。同時中間的馬達也會 同步轉動, 讓電磁鐵能夠維持在同樣的高度。(紅色箭頭) 3. 上下移動:驅動中間步進馬達運轉,帶動吊線及線上的電磁 鐵,達成上下移動之效果。(黃色箭頭) 4. 吸取鍵:電磁鐵吸取物品。 以上各功能可對照圖 3.1 之示意圖參看:微型電磁塔吊夾娃娃機 18 逢甲大學學生報告 ePaper(2016 年) 圖 3.1 機構圖對應到各功能的示意圖。 藍色箭頭示意機構左右轉動。 紅色箭頭示意部件前後移動。 黃色箭頭示意電磁鐵上下移動。
19 逢甲大學學生報告 ePaper(2016 年)
第四章 實驗結果與操作說明
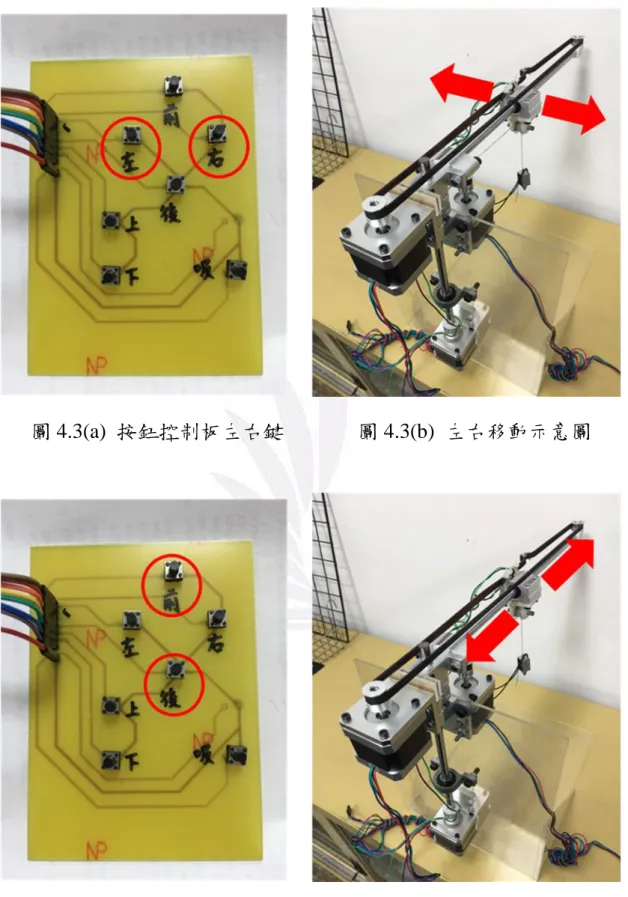
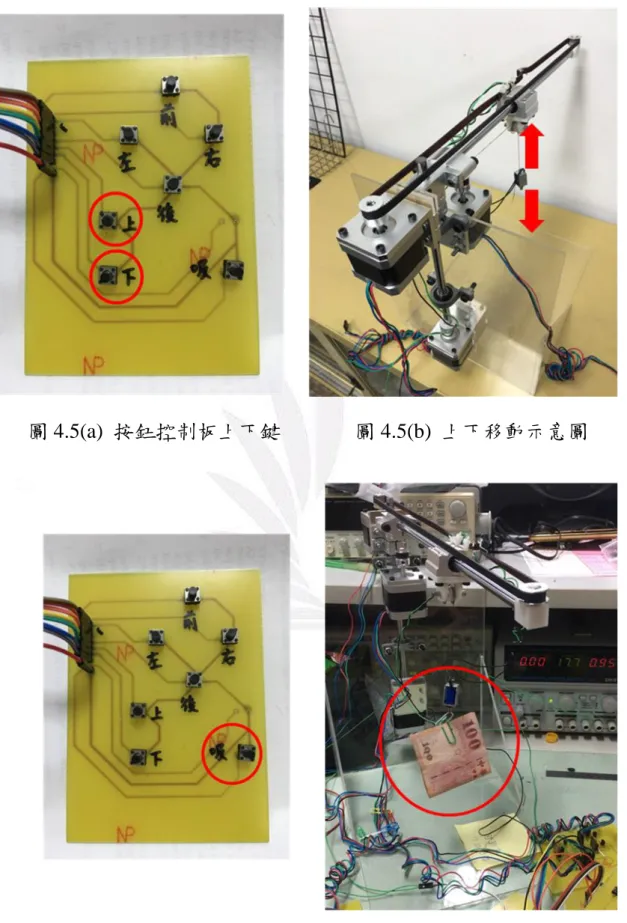
4.1 實驗結果 圖 4.1 為完成的機構成品,圖 4.2 為操控用之按鈕控制版。 圖 4.1 塔吊夾娃娃機成品實體圖 圖 4.2 控制板實體圖微型電磁塔吊夾娃娃機 20 逢甲大學學生報告 ePaper(2016 年) 由控制板上的按鈕來操控微型電磁塔吊夾娃娃機,按鈕板人性化 的佈置,使人能清楚知道上下、左右、前後共六個按鈕,最後的吸取 按鈕則獨立於一旁。 4.2 操作說明 最後實驗結果,透過按鈕傳遞訊號給 AT89S52,其再給指令於驅 動電路,底部馬達順時針轉帶動光軸及機構向右旋轉、逆時針則向左 旋轉(見圖 4.3);頂端馬達順時針轉,帶動履帶及固定其上的軸承基座 及電磁鐵前進,逆時針則後退(見圖 4.4);中央馬達順時針轉,其輪軸 帶動吊線與電磁鐵下降,逆時針則上升(見圖 4.5),最後再搭配電磁鐵 吸取的功能(見圖 4.6),完成微型電磁塔吊夾娃娃的所有步驟。 實際操作影片連結見附錄 H。
21 逢甲大學學生報告 ePaper(2016 年)
圖 4.3(a) 按鈕控制板左右鍵 圖 4.3(b) 左右移動示意圖
微型電磁塔吊夾娃娃機
22 逢甲大學學生報告 ePaper(2016 年)
圖 4.5(a) 按鈕控制板上下鍵 圖 4.5(b) 上下移動示意圖
23 逢甲大學學生報告 ePaper(2016 年)
第五章 結論與未來展望
5.1 結論 在結合電機、機械及 3D 繪圖等知識的搭配下,成功製做出一個 能夠靈活操作及取物的機構,在特定範圍內吸取物品並放置到目的地 位置。期望本題目所使用的機構及方法在未來能夠延伸應用在機械手 臂或是需要精密操作的儀器上。 5.2 未來展望 接著將列出在製作專題時所遇到的主要問題,及未來可改善此作 品的方向: 1. 在成功使用麵包板完成電路及操作後,製做成 PCB 板的過程需要 再更謹慎,若需要更改電路,最好要模擬過後再更改 Layout 圖的 電路,否則易產生 bug。 2. 自製的馬達驅動模組會過熱,希望能改進這一方面的問題,設計 出更好的驅動電路。 3. 本專題塔吊的運行空間為一個半圓柱體,希望能朝立方體空間邁 進,更能符合現在生活許多空間的發展與延伸性。 4. 功能方面希望除了上下、左右、前後控制外,我們有嘗試寫自動 回歸的功能,但尚未完成這方面的程式撰寫。未來若完成此部分,微型電磁塔吊夾娃娃機 24 逢甲大學學生報告 ePaper(2016 年) 功能將能更加完整。 5. 電磁鐵的吸力有點小,希望能增強電磁鐵的吸力,或是嘗試把電 磁鐵換成爪子,便能抓取更多種類的物品。 5.3 專題構思流程圖 本專題題目是經由全組員的創意與討論產出,進而考慮時間性和 可行性,預定專題需要的功能和達成的目的。起初參考歷屆學長姐的 作品,尋找相關性較大的題目,參考其機構的建立、程式碼的撰寫、 電路的設計,再結合微處理機正課與實習所學習到的知識,且同時查 詢網路、圖書館相關資料,最後起與助教、老師討論此專題的可行性 和延伸性,得到最完整的系統架構想法。 電路設計方面,參考微處理機實習課的上課內容及作業練習,然 後請問助教,程式碼結合老師微處理機正課所教授的內容,開始用 Keil 撰寫組合語言、OrCad 設計電路及 Layout 電路圖、採買及 3D 列
印零件來建立機構,第一階段完成電路設計、機構、程式撰寫,並在 麵包板上進行初階操作,第二階段程式除錯,洗電路板、鑽孔、焊接, 第三階段,完成系統架構執行最後的測試。
25 逢甲大學學生報告 ePaper(2016 年) 接著將列出執行、構思、設計、實做、操作等五個流程圖,分別 為圖 5.1~圖 5.5。 圖 5.1 專題執行流程圖 (接下頁) 開始 構思 實作 操作 設計 結束
微型電磁塔吊夾娃娃機 26 逢甲大學學生報告 ePaper(2016 年) 否 圖 5.3 設計流程圖 是 圖 5.2 構思流程圖 構思 參考學長 姐作品 找圖書館 網路資料 初期產品 系統架構 與老師、助 教討論 可行? 設計 設計 系統硬體 系統軟體 繪製主電 路圖 撰寫主程 式 繪製驅動 電路圖 撰寫驅動 程式 撰寫電磁 鐵副程式 在麵包板 上測試 實作
27 逢甲大學學生報告 ePaper(2016 年) 圖 5.4 實作流程圖 圖 5.5 操作流程圖 實作 PCB 佈線 及列印 曝光、蝕刻 鑽孔、焊接 操作 操作 系統功能 流程與步 驟 書面報告 列印 上機展示 結束
微型電磁塔吊夾娃娃機 28 逢甲大學學生報告 ePaper(2016 年)
第六章 組員工作劃分
組員姓名 工作分配 陳健庭 機構設計、機構組裝、焊接元件、口頭報告、Word 及 PPT 報告撰寫 劉昭逸 程式碼撰寫、設計馬達驅動電路、焊接元件 許又杰 繪製電路圖、Layout、焊接元件 劉興祐 機構零件採買、Word 及 PPT 報告撰寫、洗電路板 陳彥儒 機構零件採買、Word 及 PPT 報告撰寫、鑽孔29 逢甲大學學生報告 ePaper(2016 年)
第七章 工作日誌
第一階段 第二階段 第三階段 第四階段 許又杰 設計主電路 Layout 主電 路板、驅動 電路板、按 鈕控制板 焊接電路板 協助整體結 合並修正 陳健庭 設計機械架 構 使用 3D 列 印製做零件 組裝機構 協助整體結 合並修正 陳彥儒 採買零件 開始製作報 告 Word 檔 洗電路板、 鑽孔 協助整體結 合並修正 劉昭逸 設計馬達驅 動電路 撰寫主程式 馬達驅動電 路測試 程式除錯、 協助整體結 合並修正 劉興祐 採買零件 開始製作報 告 PPT 檔 洗電路板、 鑽孔 協助整體結 合並修正微型電磁塔吊夾娃娃機 30 逢甲大學學生報告 ePaper(2016 年)
第八章 組員心得
許又杰: 這個專題真的讓我受益良多,因為我們做的是自己以前從來沒有 做過,別的前輩們也沒有想過,並且也一度被認為做不出來的成品。 這是一個非常好的經驗,讓我們可以主動的去接觸一些自己從未接觸 過的事物。並且,這個專題讓我們能夠明白如何團結一心,以及分工 合作的重要性,以此來跨越許許多多的問題和障礙。這是一般的課程 無法學習到的,並且對於我們出社會工作的效率以及與別人共事的協 調性有著莫大的助益。 陳健庭: 這次的專題中,嘗試了新的想法,用我們自己的方法製作出一項 模仿建築業使用的塔吊的功能及機構。而為了完成這項作品,也很開 心能夠學習到許多不同領域的新知識。例如為了完成機構,需要自己 學習一些機械相關的知識,如各種規格的光軸跟軸承還有齒輪的搭 配、馬達跟齒輪還有履帶的用法等等;另外因為有些需要用到的零件 市面上沒有在賣,便需自己學習畫 3D 圖並用 3D 列印印製出來。而 因為想要讓機構的運作更加精準,便決定使用步進馬達。步進馬達的 驅動電路也是由我們自己設計,雖然市面上有在賣,但我們最後還是31 逢甲大學學生報告 ePaper(2016 年) 自行製做出來了。另外為了要在一定的時間內完成不少的工作量,還 用上了之前學習的專案管理的一些想法跟方法。平常要學習或是使用 這些知識的機會都是不多的,很開心能夠在這次製作專題的過程中學 習到這麼多。另外組員間也合作的很好,也在這學期認識了這些好的 夥伴,真的是一個很棒的經驗。 劉昭逸: 直流交流和伺服馬達到是有聽過,但是我從來沒有聽過步進馬達 這種馬達,而我是負責電路和程式的人,所以我找了很多關於步進馬 達的資料,每一種驅動二相四線步進馬達的驅動電路我都畫出來,用 模擬軟體試過,整整兩個禮拜我都在試驅動電路,只要實驗室有開或 是實驗課有空,我都會嘗試新的接法,我試過降低轉速(步進馬達在 高速中轉矩會下降,而且我的電流也沒有用很大),還有各式各樣的驅 動方式,但是馬達就是動不起來,直到第三個禮拜我將 2SA1015 換 成 2N2955 之後,我發現,動的方式錯了,但是驅動力比以前還要高 (以前可能接出正確的但是驅動力太小無法正確驅動) ,我試著將驅動 信號轉換位置,換成 1-1 2-3 3-2 4-4,之後就可以跑了(網路上有些是 錯的,可能不同廠商安排的線路不一樣) ,原本還打算做不出來的話就 要換成直流馬達,但是馬達的基座又不合的話機構上會有很大的問 題,在做出來的當下是時上是鬆了好大一口氣,雖然我的驅動電路還
微型電磁塔吊夾娃娃機 32 逢甲大學學生報告 ePaper(2016 年) 是會有過熱的問題,畢竟是用 2N2222 驅動大電流,另外有關於程式 部分也算是挺複雜的,因為步進馬達的驅動是用信號驅動,這次專題 實做我學到了很多東西,感覺挺不錯的。 劉興祐: 這次的專題讓我獲益良多,從一剛開始的擬定計畫到最後的組裝 機構,我們全組都非常認真的想要完美的將成品展現出來。過程中我 們遇到了許多難題,如:洗板子不小心洗掉線路、code 的預想結果跟 實際狀況有出入、電路板上的孔太小電晶體裝不下去……等,但是在 我們的共同討論以及努力下,這些問題都一一克服了,這過程我非常 開心,大家一起絞盡腦汁的想出解決方法,一同為了這個專題努力奮 鬥,最後解決問題,這感覺非常棒。我真的很幸運有這群這麼棒的組 員,讓我了解到團隊合作的重要性,也希望以後有機會能夠一起做專 題。 陳彥儒: 微處理機專題的工作量取決與自己所訂的題目,本來要用爪子的 後來改為電磁鐵,因配合在時間內能完成做的決定。過程中學習到很 多事,如何有效的團隊合作,每個禮拜五的下午,每個組員都從不缺 席,開討論室一起討論,互相幫助,當面討論、解決問題。五月底時,
33 逢甲大學學生報告 ePaper(2016 年)
開始洗電路板時才發現好趕,我們一共需要洗五個電路板,所以鑽孔 跟焊接花的時間比其他組還多,我們再次發揮團隊精神,分工合作, 這次的專題同時也給我在大二留下另一個美好的回憶!
微型電磁塔吊夾娃娃機 34 逢甲大學學生報告 ePaper(2016 年)
附錄
附錄 A:主程式程式碼 ORG 0000H ;開機程序 MOV P0,#11111111B ;都設為 1,因為電路會經過相反器 MOV P1,#11111111B MOV P2,#11111111B MAIN: JNB P0.0,SET1 ;主要功能,按下按鍵跳躍到副程式 JNB P0.1,SET2 JNB P0.2,SET3 JNB P0.3,portal9 JNB P0.4,portal7 JNB P0.6,portal3 JNB P0.5,portal1 AJMP MAINportal1: AJMP SET6 ;傳送門,用來傳送到其他 portal3: AJMP SET7 ;跳躍指令到不了的地方 portal7: AJMP SET5
portal9: AJMP SET4
SET1: MOV A,#33H ;底座馬達左旋(設置初始信號) MOV P1,A
LOOP1: RL A ;左旋整排 P1 信號 MOV P1,A
ACALL DELAY
35 逢甲大學學生報告 ePaper(2016 年) STOP1: MOV P1,#00010001B ;輸入馬達一個相位為 1,產生阻力 ;抵銷系統轉動動能(牛頓第一運 ;動定律) ACALL DELAY2 ;等待動能消退 MOV p1,#11111111b ;還原系統初始值,避免 2N2222 ;燒壞 AJMP MAIN ;回主程式
微型電磁塔吊夾娃娃機
36 逢甲大學學生報告 ePaper(2016 年)
附錄 B:AT89S52 Capture 電路圖
37 逢甲大學學生報告 ePaper(2016 年)
附錄 D:按鈕控制板 Capture 電路圖
微型電磁塔吊夾娃娃機
38 逢甲大學學生報告 ePaper(2016 年)
附錄 F:馬達驅動電路 Layout 圖
39 逢甲大學學生報告 ePaper(2016 年)
附錄 H:實際操作影片連結
(1) https://goo.gl/photos/kHZhkC78UFFznbx37 (2) https://goo.gl/photos/oLsFAJ7yLBYzJMhR8
微型電磁塔吊夾娃娃機 40 逢甲大學學生報告 ePaper(2016 年)
參考文獻
[1] 維基百科 英特爾 8051,民國 105 年 6 月 20 日,取自: https://zh.wikipedia.org/wiki/%E8%8B%B1%E7%89%B9%E7%88 %BE8051。 [2] 林庭生、廖冠富、林宸賢、詹學頤、許嘉晉、顏證祐、林庭生(民 國 103 年 6 月),103 學年度微處理機實習期末專題挖土機,逢甲 大學電機工程學系微處理機專題報告,台中市。[3] mBlock & Arduino(16)控制步進馬達,民國 105 年 6 月 20 日, 取自:
http://www.codedata.com.tw/social-coding/mblock-arduino-16-stepp er/。